A quantizer of 14 bits is utilized in the simulations below. The filters are designed by “firpm” function in MATLAB
©, which uses the Parks-McClellan optimal equiripple design algorithm. The
dB bandwidth of Channel 0 is
. We define a term for sinusoidal signals to indicate the dynamic performance of the TIADC: the Largest-Signal-to-largest-Spurious-component-Ratio (LSSR).
where
is the power of the
i-th sinusoidal component in the DFT spectrum, and
is the power of the
j-th spurious component including harmonic component. For a single-tone sinusoid, the LSSR is equal to the spurious-free dynamic range (SFDR).
5.1. Effectiveness
We evaluate the effectiveness of the proposed approach by simulating two cases.
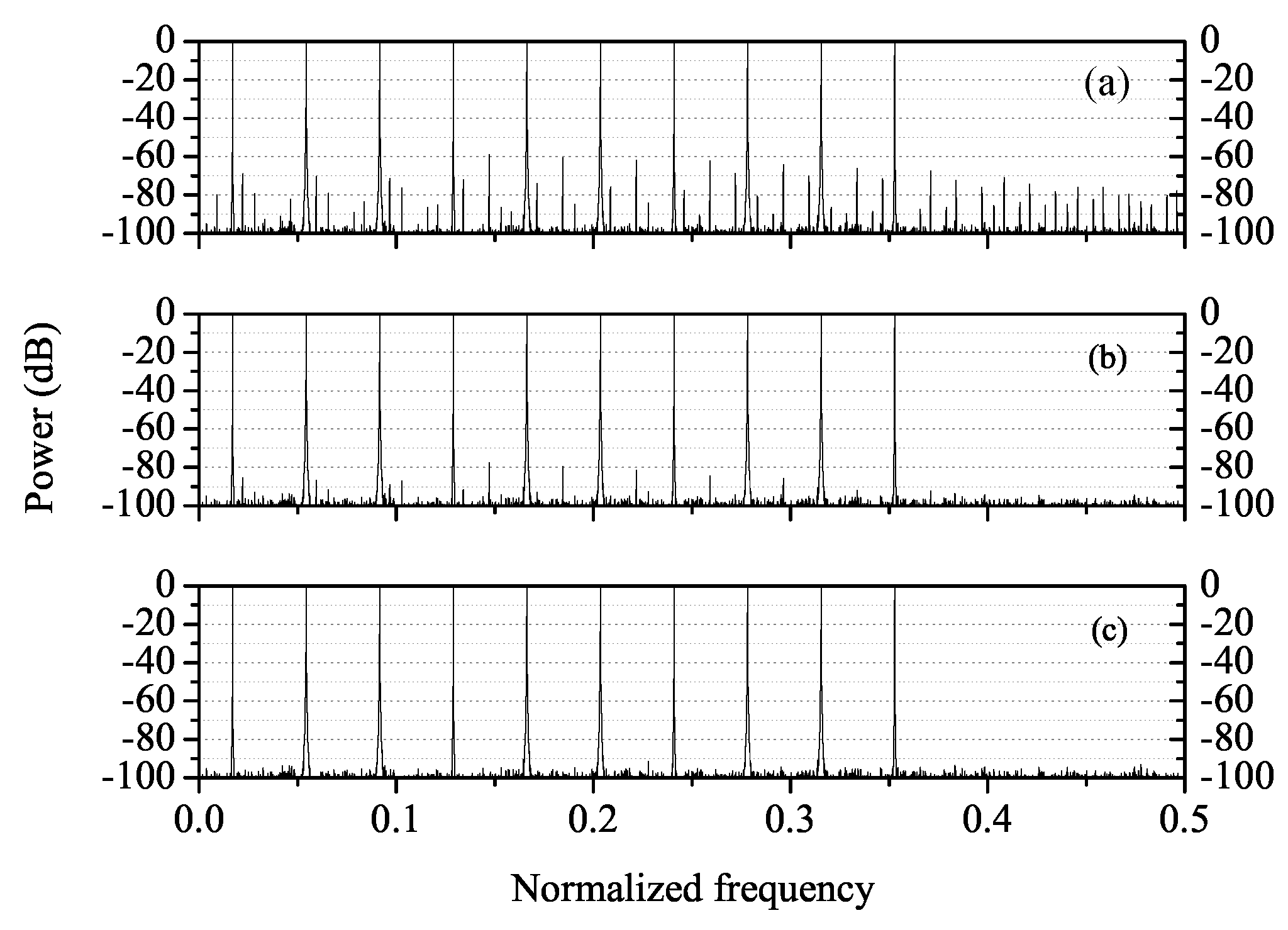
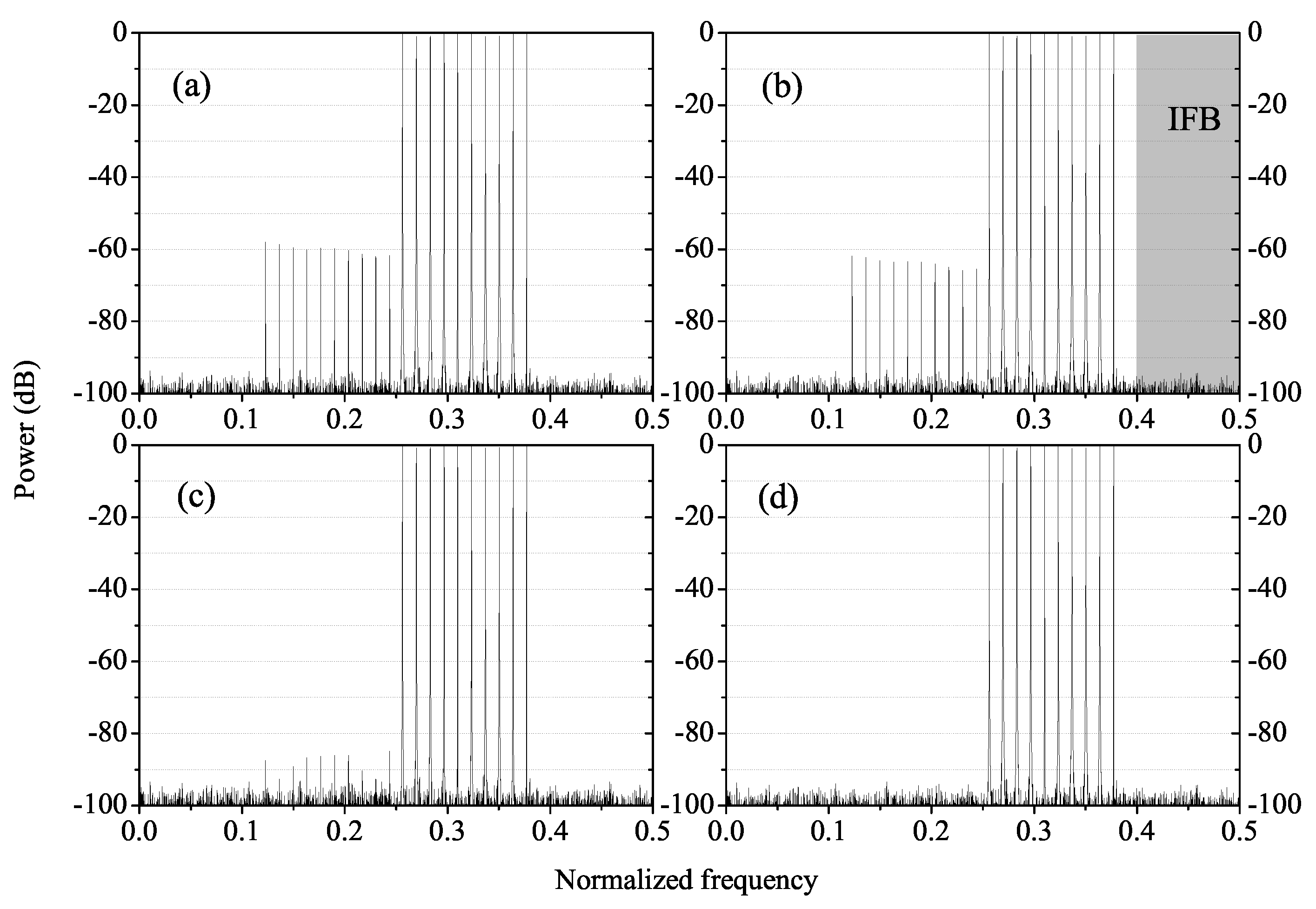
In the first case, an 8-channel TIADC is simulated. The parameters are set as
Table 1 and
Table 2. The output power spectra are demonstrated in
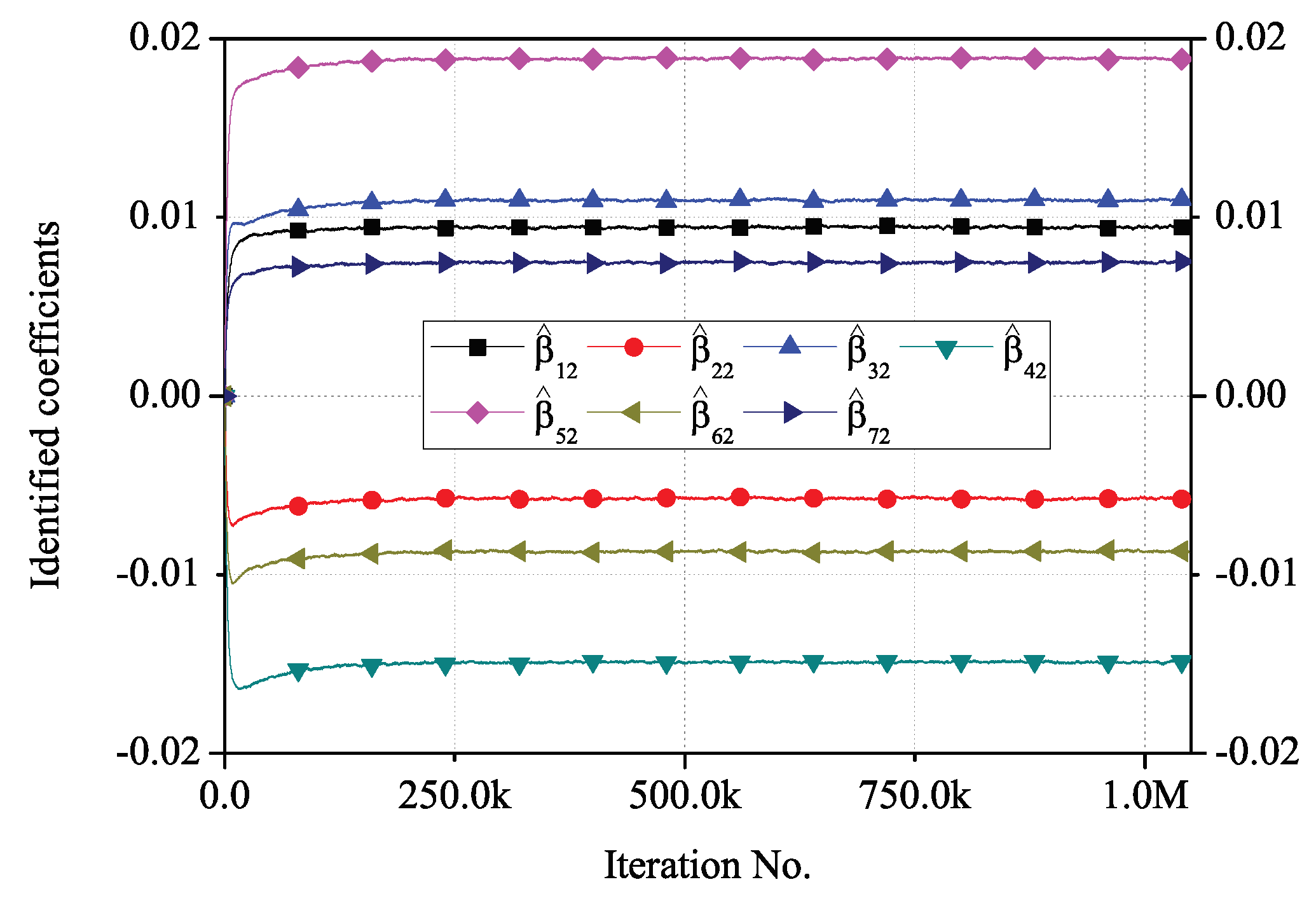
Figure 8. The higher vertical lines up to 0 dB stand for the desirable input signals, while the lower vertical lines are the bandwidth mismatch induced errors which should be suppressed below the noise floor. The signal-to-noise-and-distortion (SINAD) is 62.15 dB and the LSSR is 59.07 dBc before calibration, while they are enhanced to 74.95 dB and 77.53 dBc after Stage 1 calibration, and then to 75.78 dB and 91.39 dBc after Stage 2 calibration. The identified coefficients in Stage 2 calibration plotted in
Figure 9 and those in
Table 2 are close but not identical, because we use
and
to approximate the error rather than
in (
8) and (
9). Therefore, the algorithm proposed in this paper can accurately identify the mismatch coefficients without much prior information of the input signal other than its WSS and modulo 8 quasi-stationary properties.
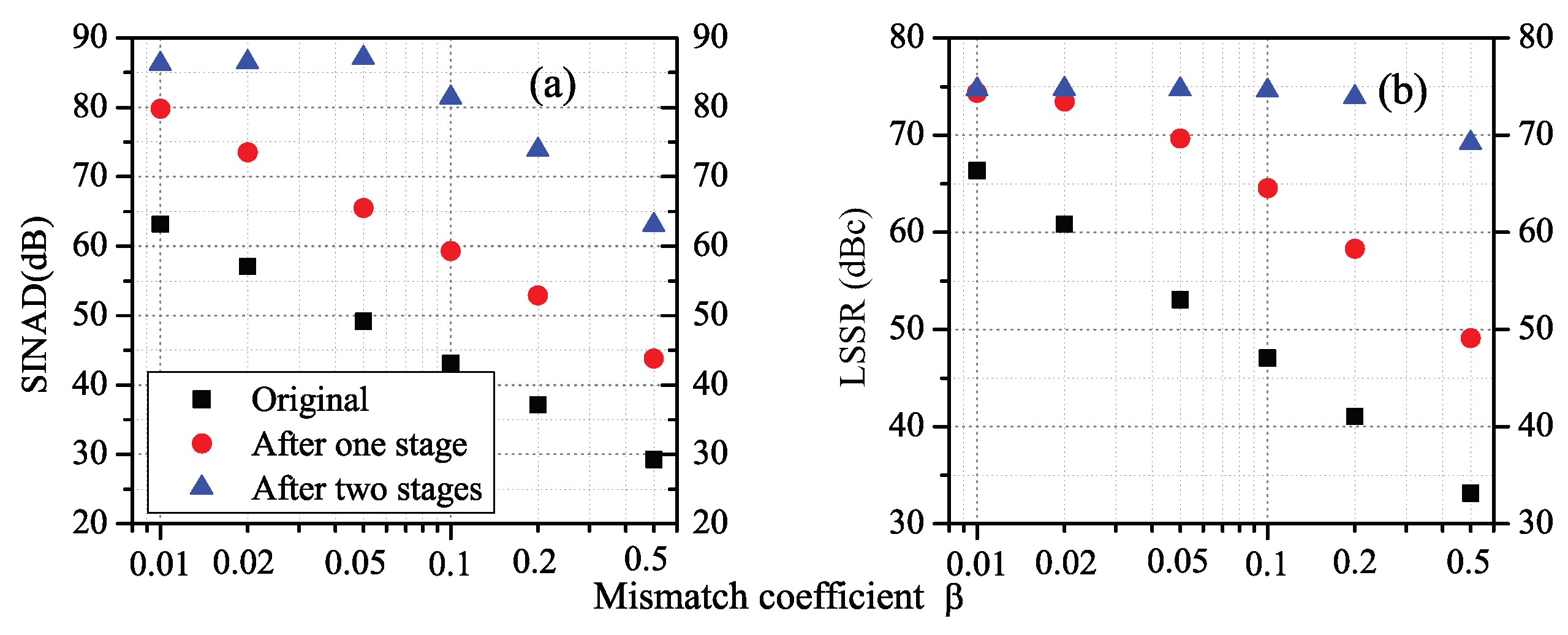
In the second case, the performance enhancement for different mismatch coefficients in a 2-channel TIADC is illustrated. Parameters are set as
Table 3. The performance before and after calibration are depicted in
Figure 10, showing that our algorithm works well under circumstances of different mismatch levels. Theoretically, larger promotion should have been achieved at smaller mismatch circumstance where the error in the compensation resulted from approximating
y or
z to
is smaller (ref. (
8) and (
9)). Whereas actually in
Figure 10, the SINAD and the LSSR initially increase with the decreasing mismatch and then saturate at certain values. This is because the quantization bits of the TIADC limit the further improvement. By increasing the quantization bits, a higher promotion can be achieved, and the SINAD and LSSR will saturate at larger values.
In this subsection, the calibration method performs well for an 8-channel TIADC and a 2-channel TIADC with different mismatch coefficients.
5.2. Parameter Selection
We show the differentiator order selection and the batch size selection by simulating two cases. A 2-channel TIADC with the mismatch coefficient is used for these two cases.
In the first case, the effect which the differentiator order has on the algorithm performance is surveyed. Simulation parameters except the differentiator order are set as
Table 3. The results are depicted in
Figure 11. One can achieve better SINAD and LSSR along with higher differentiator’s order. A 40-order differentiator is enough when the mismatch coefficient is below 0.2 and input spectrum occupies the lower
fraction of the Nyquist band. Moreover, the differentiator’s order also has a connection with its pass-band (PB) width. For example, a 20-order differentiator is enough if the input signal only occupies the lower
fraction of the Nyquist band.
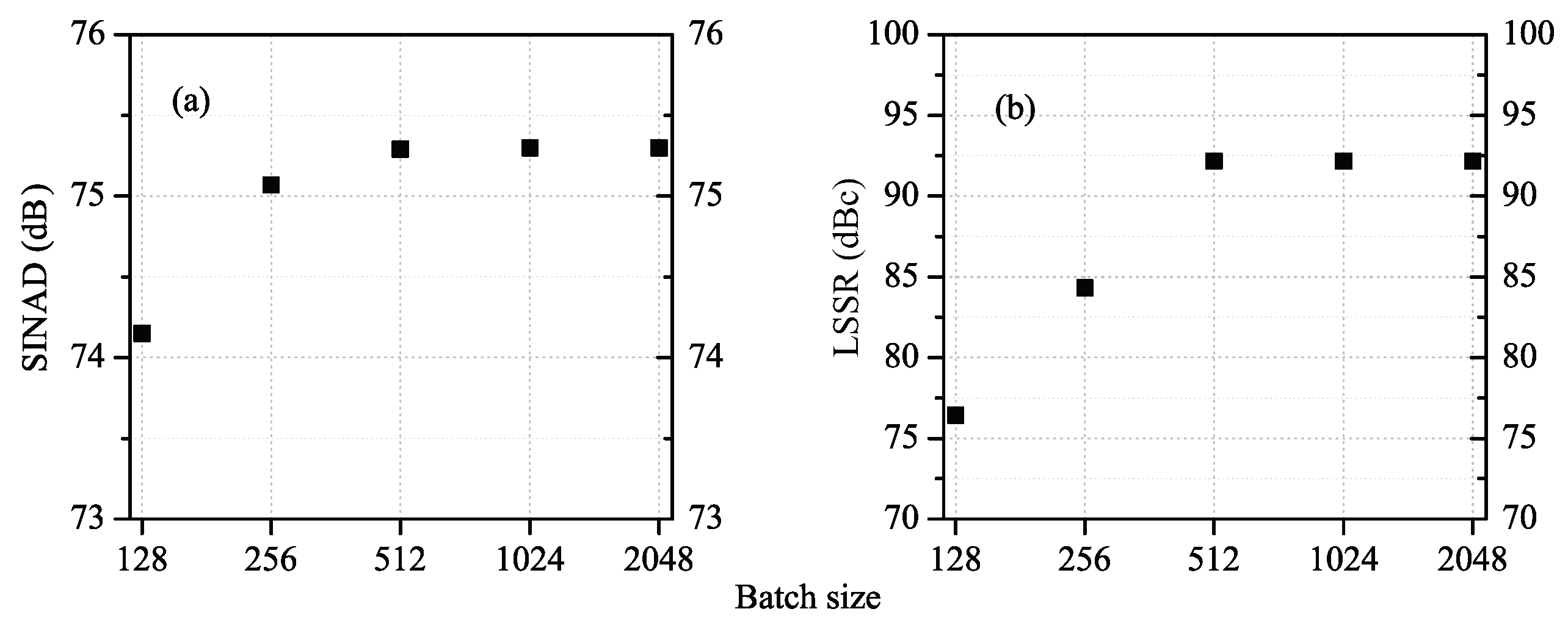
In the second case, the effect which the batch size for coefficient identification has on the calibration precision is surveyed. The input signal is set as
Table 3, and the differentiator order is set as 40. The results are depicted in
Figure 12. One can achieve better SINAD and LSSR along with larger batch size for identification, because the cost function is established under the circumstance where
as (
17). However, the resource consumption also increases with the batch size. Batch size of 512 is moderate for both dynamic performance and resource consumption.
In this subsection, we show the connection between the calibration precision and the differentiator order or the batch size. Eventually, differentiator order of 20 and batch size of 512 are selected for moderate dynamic performance and resource consumption.
5.3. Comparisons
In this section, we choose the IFB-based method [
23,
35] and the I/Q-based method [
24,
25] for comparison which are better than other methods both in bandwidth efficiency and complexity. A 2-channel TIADC is used for the following two cases.
In the first case, the LSSR improvements of the three methods are compared. The parameters are set as
Table 4,
Table 5,
Table 6 and
Table 7, and the differentiators used in the IFB method and our method are identical. The output power spectra are demonstrated in
Figure 13. The SINAD is 59.39 dB and the LSSR is 58.00 dBc before calibration, and they are slightly enhanced to 62.89 dB and 61.77 dBc using the IFB-based method, and they are enhanced to 75.08 dB and 84.95 dBc using the I/Q-based method, and they are enhanced to 77.34 dB and 93.05 dBc employing the method proposed in this paper.
For the IFB-based method, an input-free band is created in the frequency spectrum by oversampling where the mismatch-induced error exists without input signal. By exerting a high-pass filter whose passband coincides with the IFB, the mismatch coefficients can be identified. However, in this case, the error spectrum does not appear in the IFB and the identification fails (ref.
Figure 13b). For some other kinds of narrow-band signals, the IFB-based method cannot also work.
For the I/Q-based method, the TIADC’s output signal is converted to a complex signal with frequency shift, which is similar to the homodyne receiver’s output signal with I/Q mismatch, and the I/Q mismatch calibration technique is used to calibrate the TIADC’s mismatch. The compensation filter’s coefficients are determined by restoring the complex signal’s circularity. However, in this case where the signals are multi-tone sinusoids, there is no remarkable difference between the circularity of the signal without mismatch and that of the signal with mismatch, and therefore the calibration cannot suppress the error to the noise floor. For some other types of signals mainly composed of sinusoids, the I/Q-based method also cannot work. So compared with the other two methods, our method has more extensive applicability for different types of signals.
In the second case, the resource consumptions are compared among the three methods when the same error attenuation is achieved after calibration. The multiplications used in one loop of calibration is chosen as the indicator. The input signal is set as
Table 8 so that all the methods can work effectively.
. The variables
,
,
,
and
N are defined in
Table 1,
Table 5 and
Table 6.
The resource consumption for the I/Q-based method is calculated as follows.
It needs
multiplications to pass the output signal through the Hilbert filter because the filter’s taps are anti-symmetric with a null center tap.
It needs
multiplications to compensate the signal, since both the signal and the filter taps are complex, and multiplying two complex numbers actually needs four multiplications of real numbers.
It consumes
multiplications to update the compensation filter’s taps. Adding
to
, the total number of multiplications needed in one calibration iteration is
Here,
and
is set to be 0, which results in 13 multiplications in total.
The IFB-based method and the proposed method use the common compensation technique and the consumption is calculated as follows. For simplicity, only the first Richardson iteration is considered for both the IFB method and ours.
It needs
multiplications to get
because the differentiator’s taps are anti-symmetric with a null center tap.
It requires 1 multiplication to scale
with estimated coefficients as (
8).
The consumption of the identification procedure for the IFB-based method is calculated as follows.
It consumes
multiplications to filter
due to the anti-symmetric property of the high-pass filters’ taps.
It requires 2 multiplications to update
. Adding
to
, the total number of multiplications needed in one calibration loop is
Here,
and
, which results in 33 multiplications in total.
The consumption of the identification procedure for the proposed method is calculated as follows.
It takes
multiplications to calculate
and
as (
17).
It requires
multiplications to calculate
as (
25) to (
28).
It requires 1 multiplication to update
. (All the constant coefficients used in (
17), and (
25) to (
28) can be combined together into the step
, so only one multiplication is needed to consider them all.) Adding
to
and
to
, the total number of multiplications needed in one calibration loop is
Here,
and
N is set to be 32, which results in 140 multiplications in total.
The comparison results of the above two cases are shown in
Table 9. The proposed method in this paper is more complex compared with the other two methods when calibrating the same signals, but this method can apply to more types of signals and more channels whereas the other two methods cannot.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}