A Layer-Wise Strategy for Indoor As-Built Modeling Using Point Clouds



Abstract
:1. Introduction
2. Related Work
2.1. Limitations in Detailed Model Reconstruction
2.2. Specific Input Data
3. Methodology
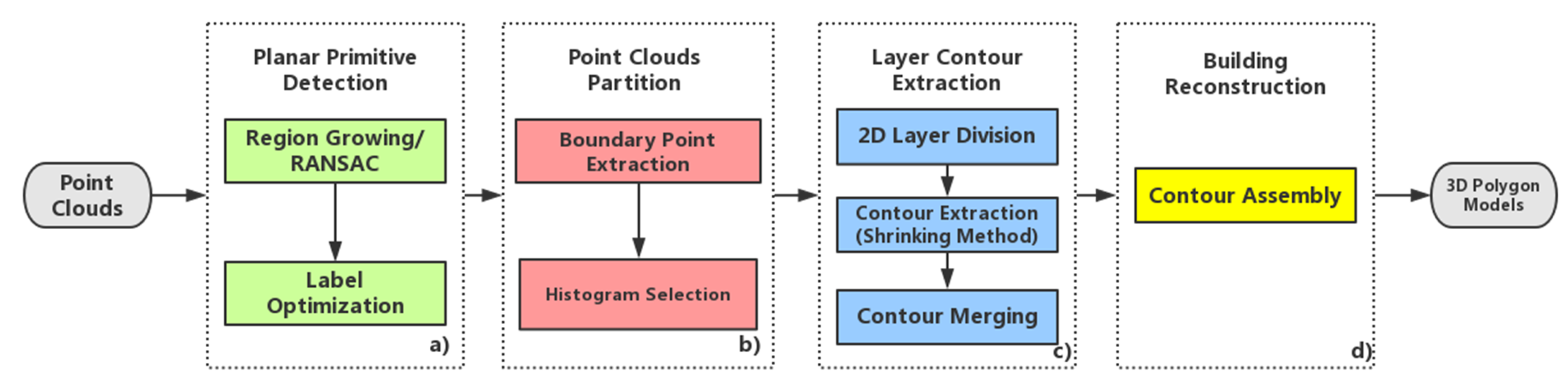
3.1. Overview of the Approach
3.2. Planar Primitive Detection
3.2.1. Initial Planar Primitive Extraction
3.2.2. Planar Primitive Optimization
3.3. Point Cloud Partition
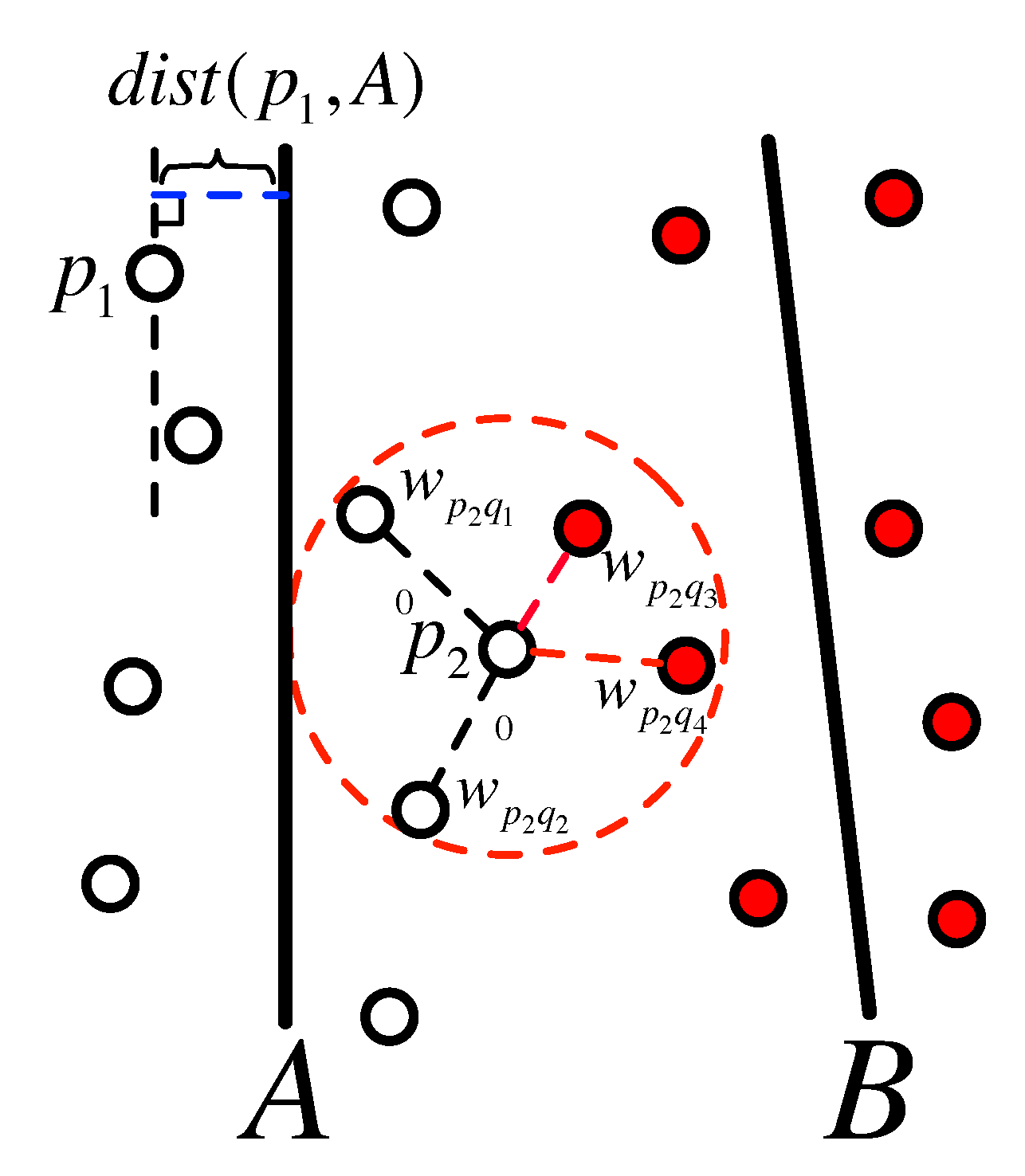
3.3.1. Boundary Point Extraction
3.3.2. Representative Layer Selection
3.4. Layer Contour Extraction
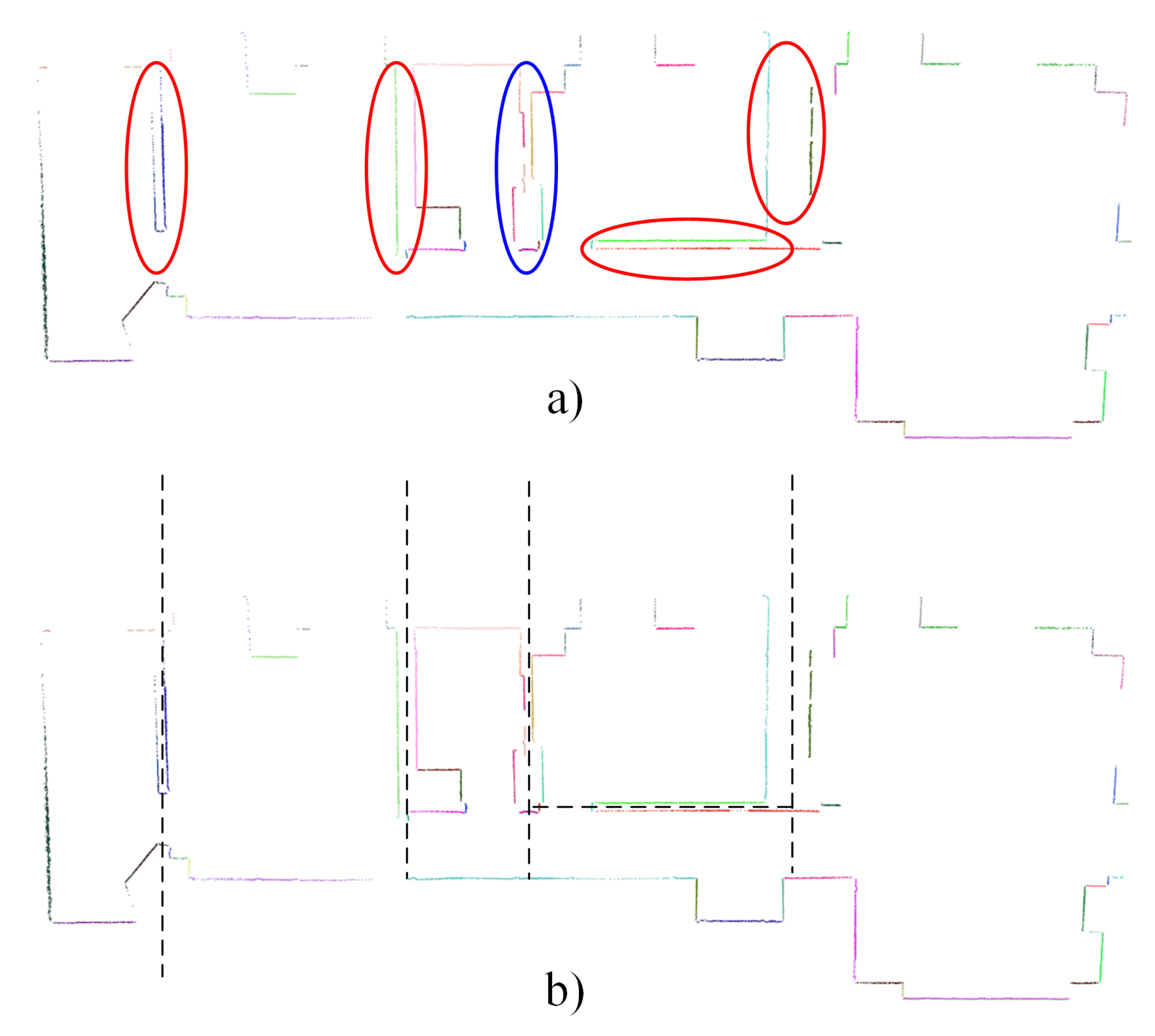
3.4.1. 2D Layer Division
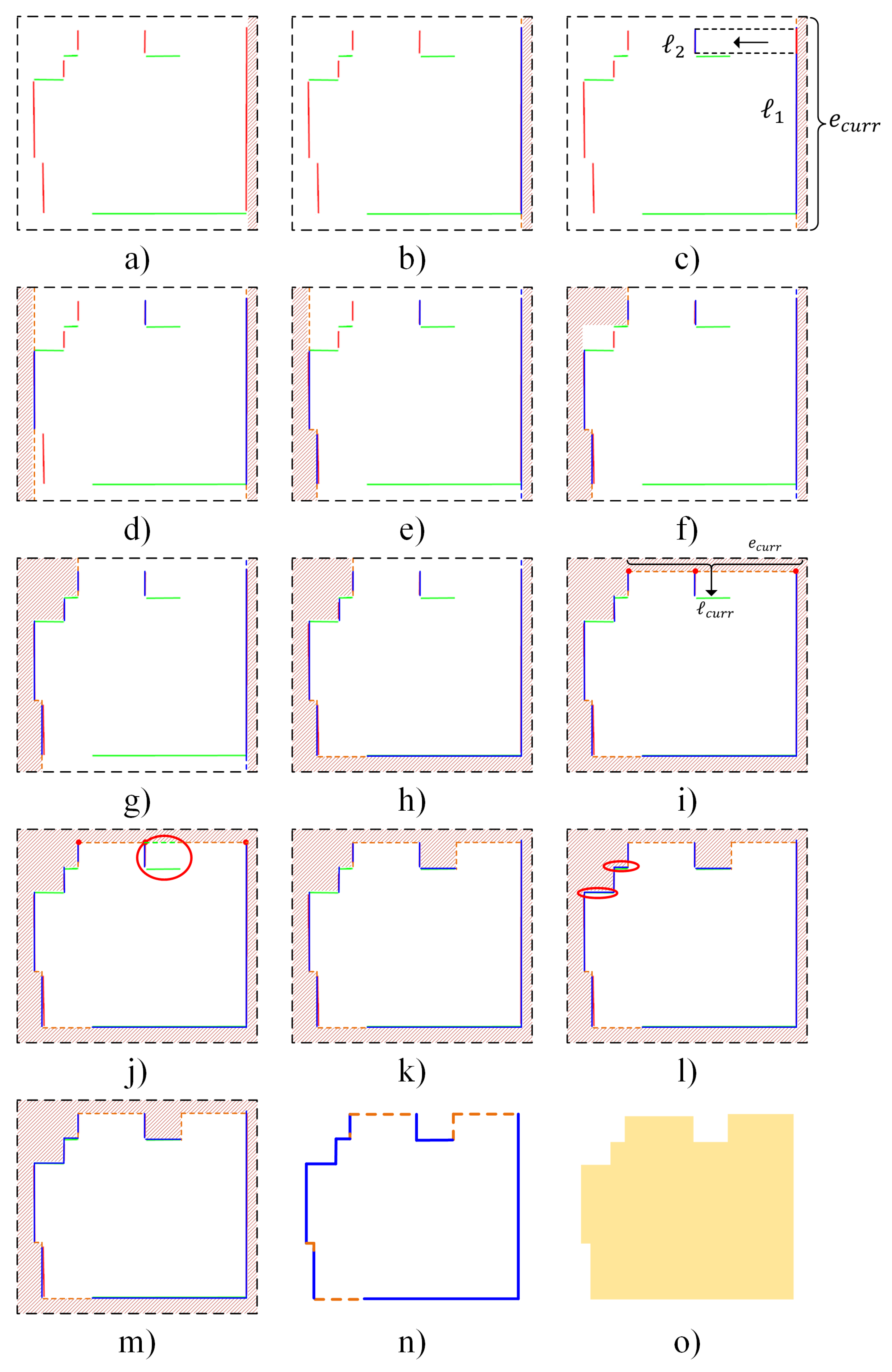
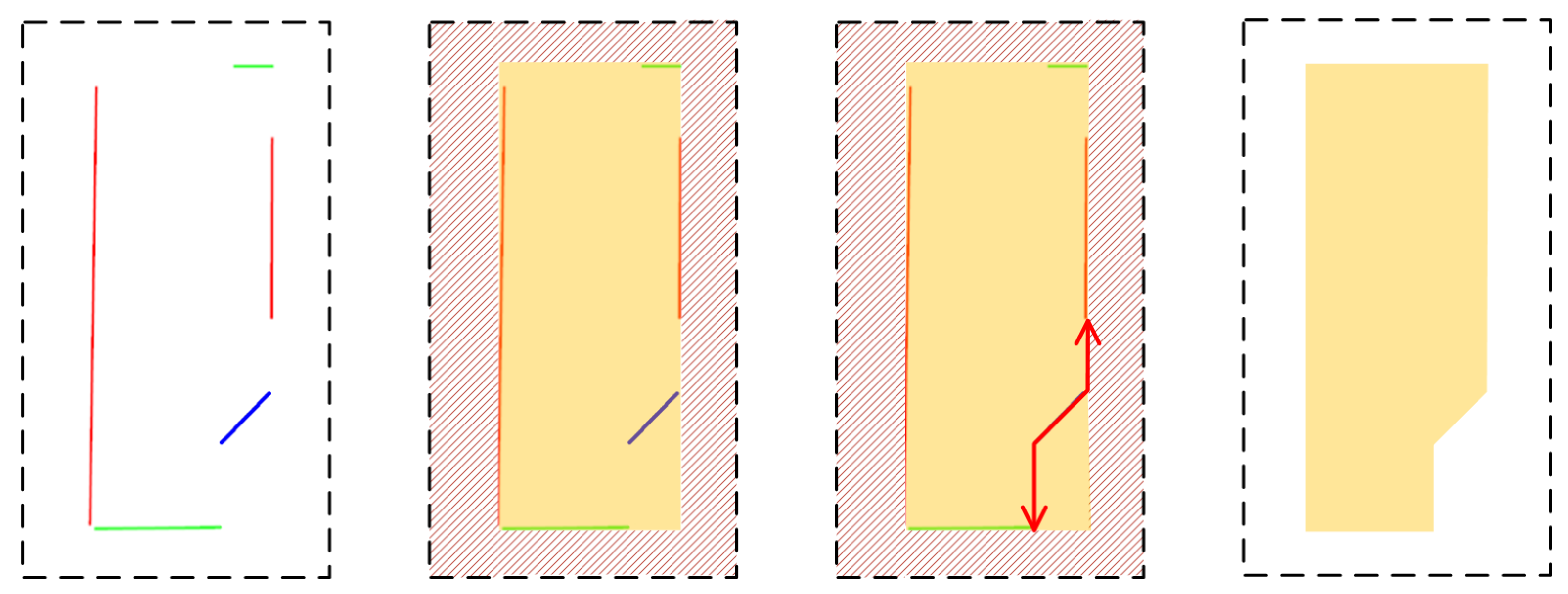
3.4.2. Contour Extraction
- (1)
- Sub-Contour Extraction
- (2)
- Sub-Contour Mergence
| Algorithm 1: Contour Extraction. |
 |
3.5. Building Reconstruction
4. Experiments
4.1. Datasets
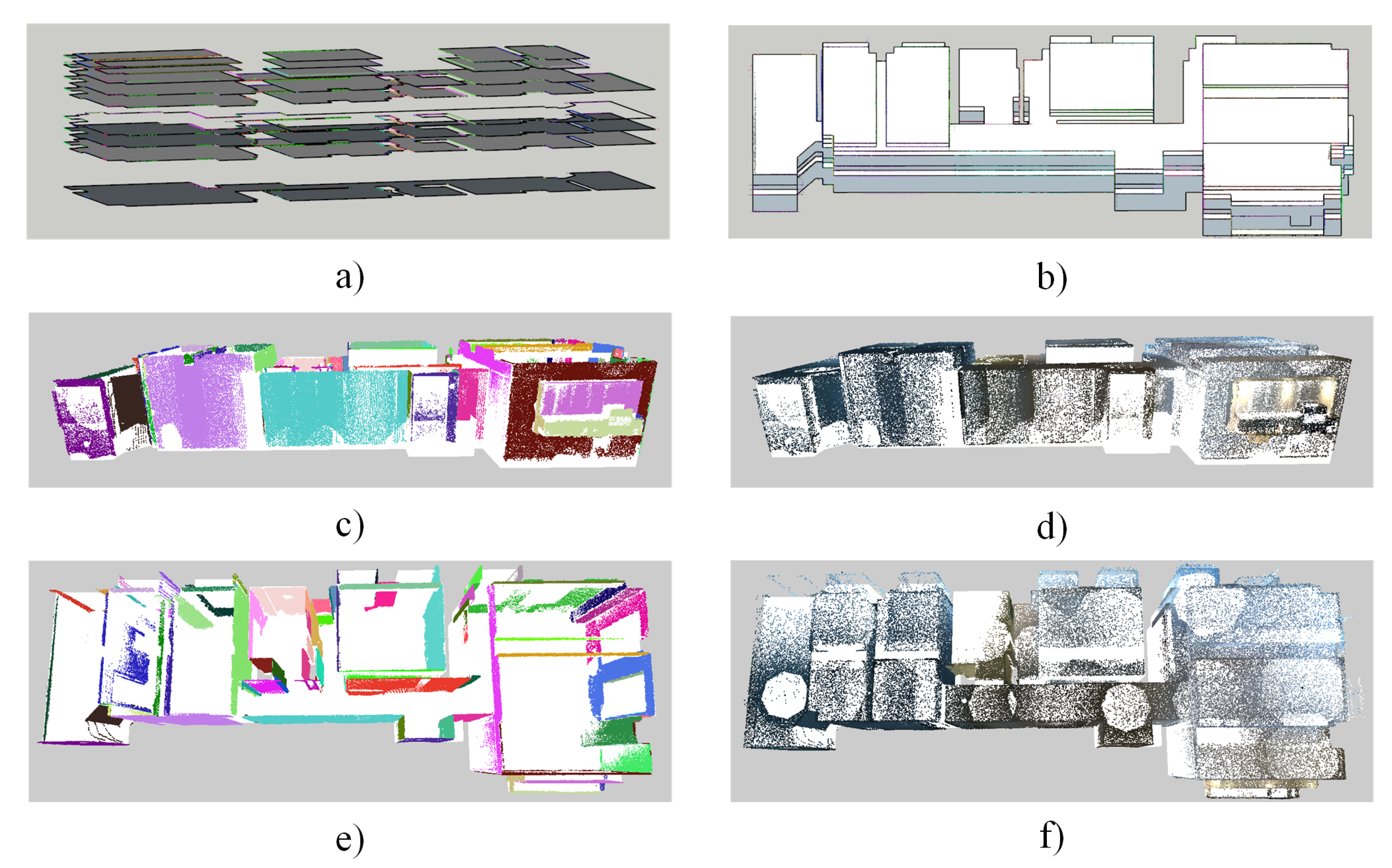
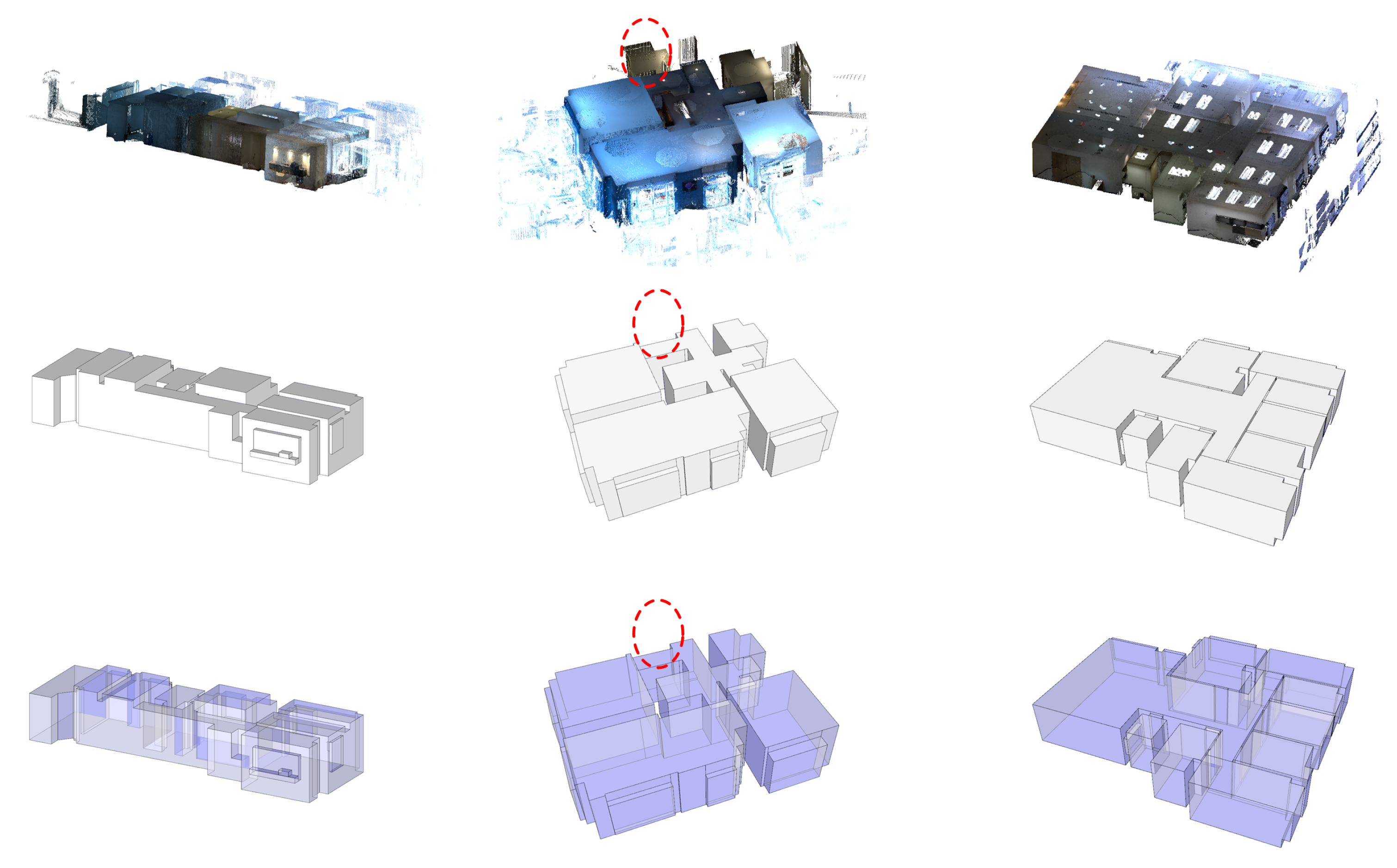
4.2. Modeling Outputs
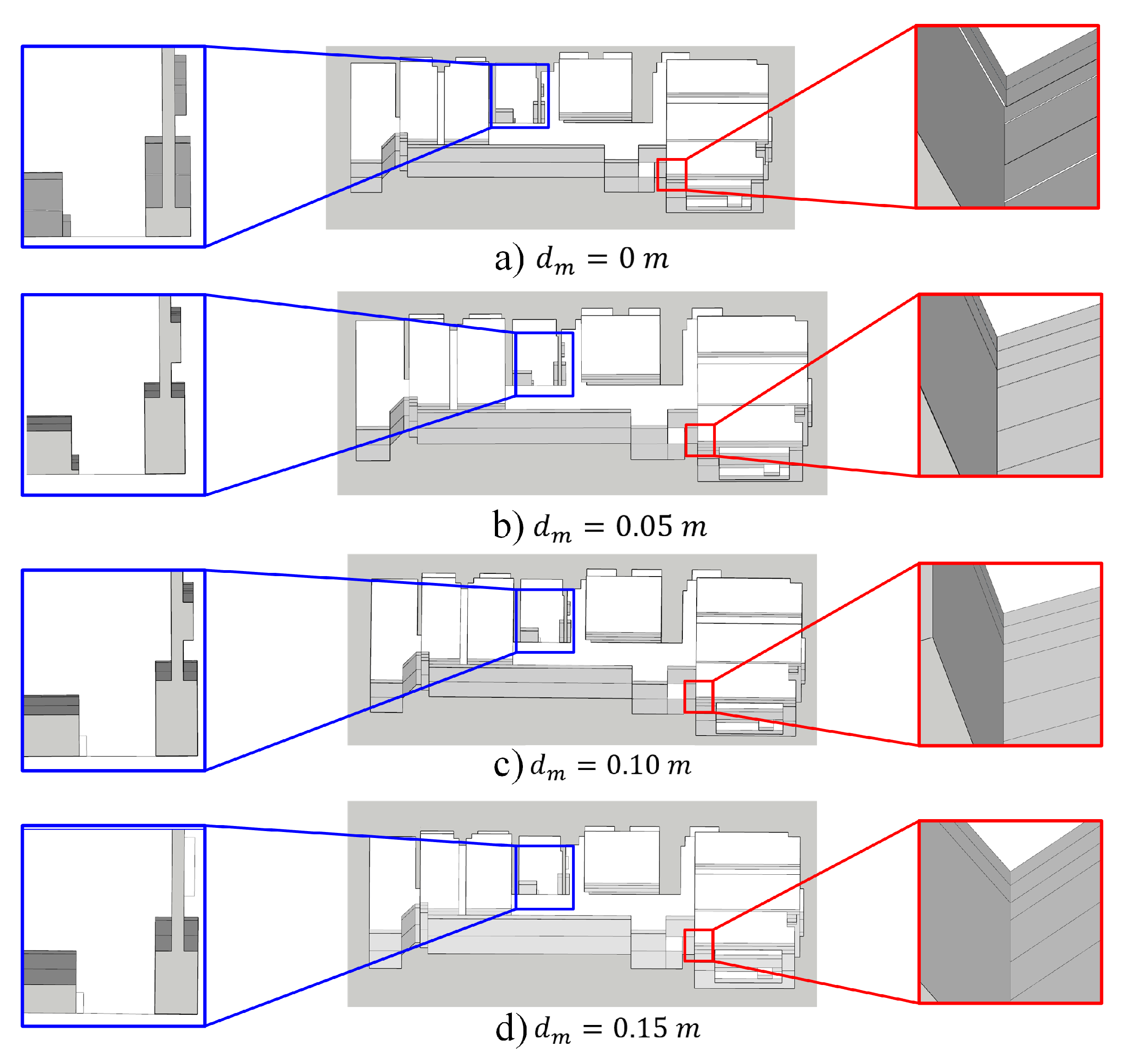
4.3. Parameters
4.4. Quantitative Evaluation
4.5. Comparisons
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tang, P.; Huber, D.; Akinci, B.; Lipman, R.; Lytle, A. Automatic reconstruction of as-built building information models from laser-scanned point clouds: A review of related techniques. Autom. Constr. 2010, 19, 829–843. [Google Scholar] [CrossRef]
- Jung, J.; Hong, S.; Jeong, S.; Kim, S.; Cho, H.; Hong, S.; Heo, J. Productive modeling for development of as-built BIM of existing indoor structures. Autom. Constr. 2014, 42, 68–77. [Google Scholar] [CrossRef]
- Previtali, M.; Díaz-Vilariño, L.; Scaioni, M. Indoor building reconstruction from occluded point clouds using graph-cut and ray-tracing. Appl. Sci. 2018, 8, 1529. [Google Scholar] [CrossRef]
- Khoshelham, K.; Elberink, S.O. Accuracy and resolution of kinect depth data for indoor mapping applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef] [PubMed]
- Lehtola, V.V.; Kaartinen, H.; Nüchter, A.; Kaijaluoto, R.; Kukko, A.; Litkey, P.; Honkavaara, E.; Rosnell, T.; Vaaja, M.T.; Virtanen, J.P.; et al. Comparison of the selected state-of-the-art 3D indoor scanning and point cloud generation methods. Remote Sens. 2017, 9, 796. [Google Scholar] [CrossRef]
- Bosse, M.; Zlot, R.; Flick, P. Zebedee: Design of a spring-mounted 3-d range sensor with application to mobile mapping. IEEE Trans. Robot. 2012, 28, 1104–1119. [Google Scholar] [CrossRef]
- Budroni, A.; Böhm, J. Automatic 3D modelling of indoor Manhattan-World scenes from laser data. Proc. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 115–120. [Google Scholar]
- Ikehata, S.; Yang, H.; Furukawa, Y. Structured indoor modeling. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1323–1331. [Google Scholar]
- Mura, C.; Mattausch, O.; Villanueva, A.J.; Gobbetti, E.; Pajarola, R. Automatic room detection and reconstruction in cluttered indoor environments with complex room layouts. Comput. Gr. 2014, 44, 20–32. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Wonka, P.; Nan, L. Manhattan-World urban reconstruction from point clouds. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 54–69. [Google Scholar]
- Previtali, M.; Barazzetti, L.; Brumana, R.; Scaioni, M. Towards automatic indoor reconstruction of cluttered building rooms from point clouds. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 281–288. [Google Scholar] [CrossRef]
- Oesau, S.; Lafarge, F.; Alliez, P. Indoor scene reconstruction using feature sensitive primitive extraction and graph-cut. ISPRS J. Photogramm. Remote Sens. 2014, 90, 68–82. [Google Scholar] [CrossRef] [Green Version]
- Sanchez, V.; Zakhor, A. Planar 3D modeling of building interiors from point cloud data. In Proceedings of the 2012 19th IEEE International Conference on. IEEE Image Processing (ICIP), Orlando, FL, USA, 30 September–3 October 2012; pp. 1777–1780. [Google Scholar]
- Nakagawa, M.; Yamamoto, T.; Tanaka, S.; Shiozaki, M.; Ohhashi, T. Topological 3d Modeling Using Indoor Mobile LIDAR Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 13–18. [Google Scholar] [CrossRef]
- Wang, Q.; Yan, L.; Zhang, L.; Ai, H.; Lin, X. A Semantic Modelling Framework-Based Method for Building Reconstruction from Point Clouds. Remote Sens. 2016, 8, 737. [Google Scholar] [CrossRef]
- Xiao, J.; Furukawa, Y. Reconstructing the world’s museums. Int. J. Comput. Vis. 2014, 110, 243–258. [Google Scholar] [CrossRef]
- Wang, R.; Xie, L.; Chen, D. Modeling indoor spaces using decomposition and reconstruction of structural elements. Photogramm. Eng. Remote Sens. 2017, 83, 827–841. [Google Scholar] [CrossRef]
- Turner, E.; Zakhor, A. Floor plan generation and room labeling of indoor environments from laser range data. In Proceedings of the 2014 International Conference on IEEE Computer Graphics Theory and Applications (GRAPP), Lisbon, Portugal, 5–8 January 2014; pp. 1–12. [Google Scholar]
- Turner, E.; Cheng, P.; Zakhor, A. Fast, automated, scalable generation of textured 3d models of indoor environments. IEEE J. Sel. Top. Signal Process. 2015, 9, 409–421. [Google Scholar] [CrossRef]
- Muja, M.; Lowe, D.G. Fast approximate nearest neighbors with automatic algorithm configuration. VISAPP (1) 2009, 2, 2. [Google Scholar]
- Delong, A.; Osokin, A.; Isack, H.N.; Boykov, Y. Fast approximate energy minimization with label costs. Int. J. Comput. Vis. 2012, 96, 1–27. [Google Scholar] [CrossRef]
- Isack, H.; Boykov, Y. Energy-based geometric multi-model fitting. Int. J. Comput. Vis. 2012, 97, 123–147. [Google Scholar] [CrossRef]
- Yi, C.; Zhang, Y.; Wu, Q.; Xu, Y.; Remil, O.; Wei, M.; Wang, J. Urban building reconstruction from raw LiDAR point data. Comput.-Aided Des. 2017, 93, 1–14. [Google Scholar] [CrossRef]
- Jeong, W.K.; Kim, C.H. Direct reconstruction of displaced subdivision surface from unorganized points. In Proceedings of the 2001 Ninth Pacific Conference on IEEE Computer Graphics and Applications, Tokyo, Japan, 16–18 October 2001; pp. 160–168. [Google Scholar]
- Kobbelt, L.P.; Vorsatz, J.; Labsik, U. A shrink wrapping approach to remeshing polygonal surfaces. Comput. Graph. Forum 1999, 18, 119–130. [Google Scholar] [CrossRef]
- Van Overveld, K.; Wyvill, B. Shrinkwrap: An efficient adaptive algorithm for triangulating an iso-surface. Vis. Comput. 2004, 20, 362–379. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point Clouds | Apartment 1 | Apartment 2 | Office 1 | Office 2 |
|---|---|---|---|---|
| # of points [million] | 5.0 | 4.5 | 10.1 | 52.2 |
| # of stations | 15 | 14 | 32 | n/a |
| # of rooms | 6 | 5 | 10 | 18 |
| Output (from 3D Primitive) | Apartment 1 | Apartment 2 | Office 1 |
| # of rooms | 6 | 4 | 10 |
| # of vertices | 358 | 194 | 260 |
| # of faces | 689 | 390 | 522 |
| Parameters | Apartment 1 | Apartment 2 | Office 1 |
| 0.9 | 0.5 | 0.5 |
| Parameters | Values | Descriptions |
|---|---|---|
| Planar primitive detection parameters | ||
| The threshold for the region-growing. | ||
| k | 20 | The searching radius of neighborhood. |
| 0.01 | The threshold to adjust the weight . | |
| Contour extraction parameters | ||
| 1/2*–1* | The maximum distance to extract the boundary point in convex hull. | |
| 0.05 m | The bin size of histogram (equals to the distance between the vertical slice). | |
| * | The searching radius of the parallel inner walls. | |
| Building reconstruction parameters | ||
| 0.05 m | The merging distance for different contours. | |
| The merging angle for different contours. | ||
| Synthetic Data | Maximum Error (cm) | Minimum Error (cm) | Average Error (cm) |
|---|---|---|---|
| Data 1 (5 mm) | 0.620 | 0.105 | 0.407 |
| Data 2 (10 mm) | 2.412 | 0.219 | 1.576 |
| Data 3 (20 mm) | 4.171 | 0.629 | 3.213 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, L.; Wang, R.; Ming, Z.; Chen, D. A Layer-Wise Strategy for Indoor As-Built Modeling Using Point Clouds. Appl. Sci. 2019, 9, 2904. https://doi.org/10.3390/app9142904
Xie L, Wang R, Ming Z, Chen D. A Layer-Wise Strategy for Indoor As-Built Modeling Using Point Clouds. Applied Sciences. 2019; 9(14):2904. https://doi.org/10.3390/app9142904
Chicago/Turabian StyleXie, Lei, Ruisheng Wang, Zutao Ming, and Dong Chen. 2019. "A Layer-Wise Strategy for Indoor As-Built Modeling Using Point Clouds" Applied Sciences 9, no. 14: 2904. https://doi.org/10.3390/app9142904
APA StyleXie, L., Wang, R., Ming, Z., & Chen, D. (2019). A Layer-Wise Strategy for Indoor As-Built Modeling Using Point Clouds. Applied Sciences, 9(14), 2904. https://doi.org/10.3390/app9142904