Underwater Wireless Communications for Cooperative Robotics with UWSim-NET

 , ,
, ,  and
and
Abstract
:1. Introduction
2. UWSim-NET
2.1. Generic Link Interface
2.2. DCComms Network Simulator
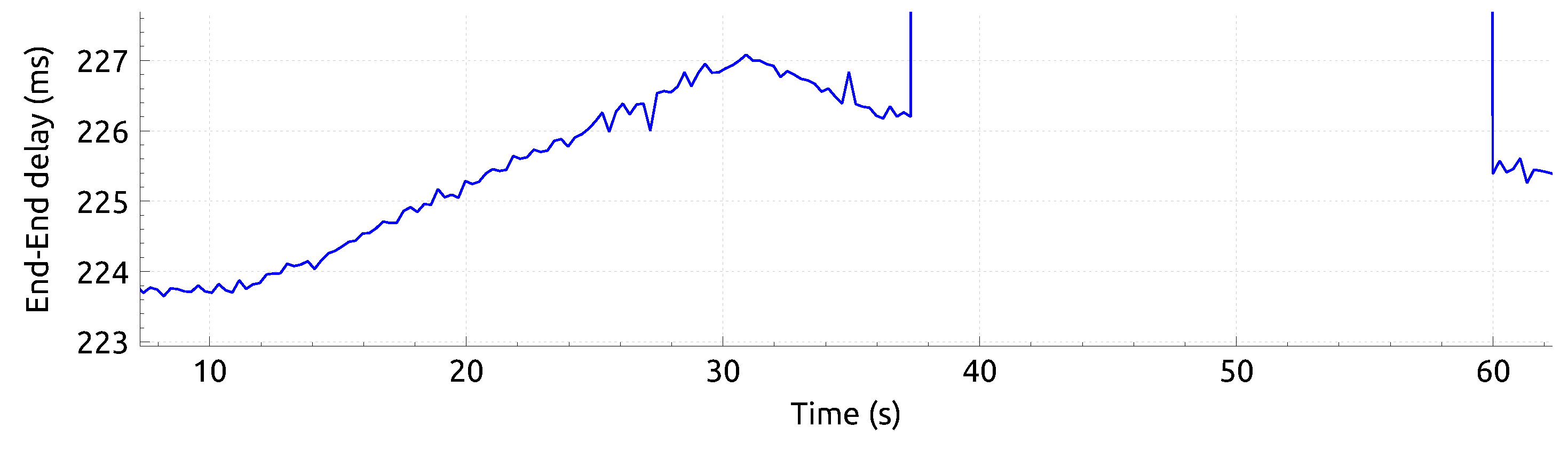
- Propagation delay is calculated considering this distance and the propagation speed in the physical medium.
- The likelihood of losing a packet is determined by means of the length of each packet, and a user provided mathematical expression that relates this distance and the BER. Lost packets are randomly discarded according to it.
- The time the modem requires to process one packet is modeled by the addition of a fixed intrinsic delay and a Gaussian random delay (jitter): Different intrinsic delays can be defined for the transmission and the reception of a packet.
- Transmit and receive delays: The small transmission rates of underwater modems, typically of several kilobits per second (kbps), causes that the times required to transmit or receive a packet being non-negligible. These delays are modeled considering the bitrate of the modem and the length of each data packet.
- Packet collisions: In the case a new packet arrives in a device during the transmission or reception of another packet, both packets are marked as collisions and discarded.
- Transmission FIFO stack: This is where transmission messages are stored temporarily when the device is busy. It has a finite size. Messages arriving when the transmission FIFO is full are thrown away, as occurs in real devices.
- Communication Range: Some modems specify a maximum and minimum distances that guarantee the correct performance of the device. The user can specify these distances and the UWSim-NET will discard all packets sent between two devices whose separation is outside these limits.
- CS-ALOHA is a carrier sense version of the ALOHA MAC protocol. When the transmitter detects that the channel is empty, it starts to send the message. The receiver responds with an acknowledgement (ACK) after a successful read. If the transmitter does not receive the ACK within a predefined time, it considers that that the transmission failed and tries to retransmit the message.
- SFAMA (Slotted Floor Acquisition Multiple Access) divides the time into slots of fixed duration. Slot duration is related with the delay at the maximum communication distance in order to prevent the overlap of RTS messages sent by different ROVs. At the beginning of a slot, the transmitter sends a Request To Send (RTS) message and waits for the Clear To Send (CTS) message sent by the receiver on the reception of CTS. Then, the transmitter starts to send a variable length DATA message. If the transmitter does not receive the CTS message, it assumes that a collision has happened and waits for a number of slots (backoff) before the retransmission of the RTS.
2.3. UWSim-NET XML
- NetTracing Script: It is the block of the xml file that allows the user to specify the NetSimTracing class with the callbacks that will handle NS3 events triggered by UWSim-NET, the library with its implementation and the name of the file where the logs will be stored.
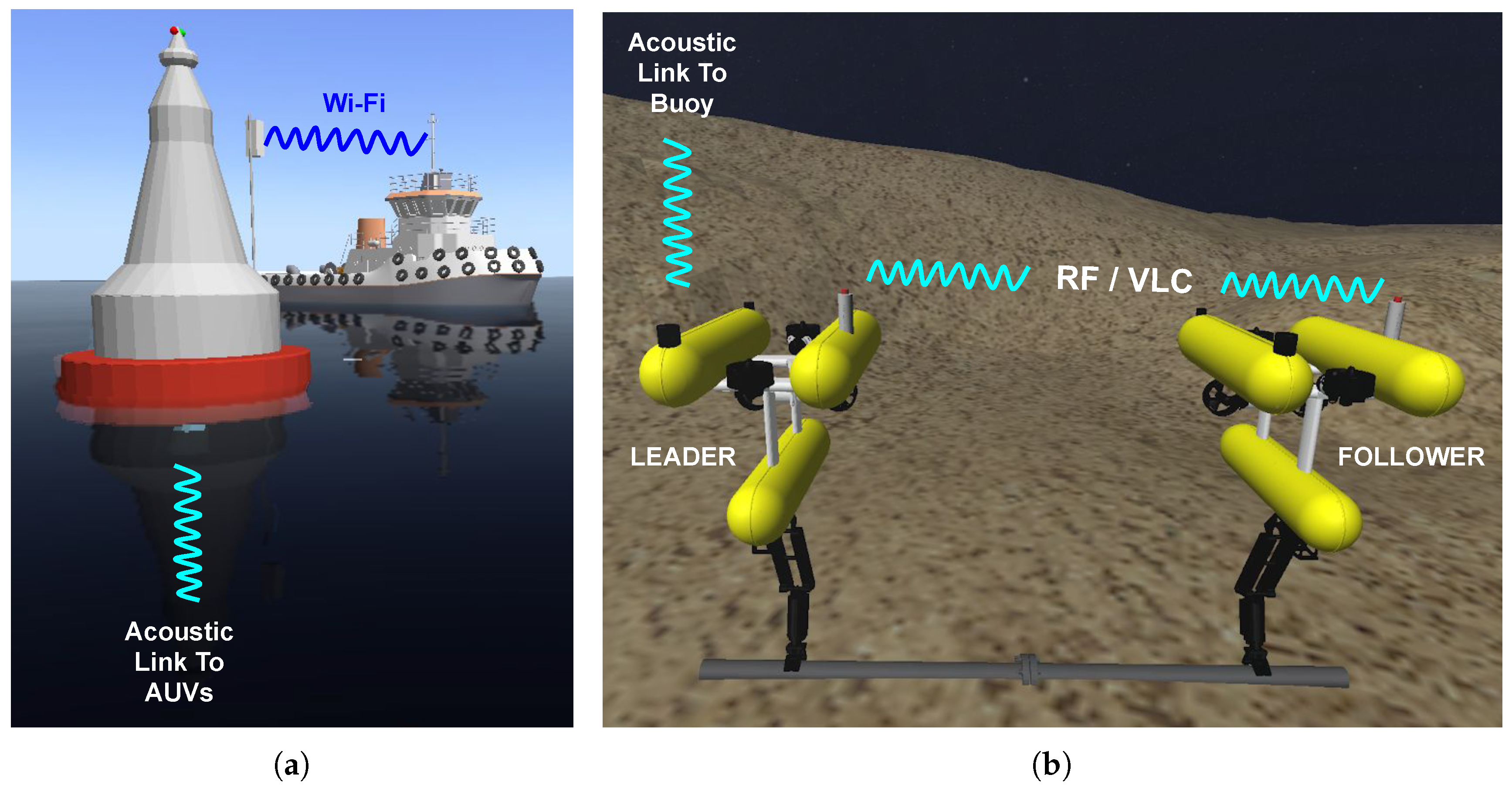
- Communication Channels: Each channel, RF, VLC or acoustic, available in the scene will be configured in a CustomCommsChannel block of the xml file. For each channel in the scene, the user is expected to specify a unique identifier and the propagation speed.
- Communication Devices: They are defined in the block of the vehicle, or ROV, and are onboarded. Each vehicle can have as many communication devices as would be required. The user is required to indicate the DCComms identifier that has to coincide with that specified in the user application that communicates with the device via the DCComms API. The user is also expected to provide the channel identifiers the device sends and receives messages, the bitrate, the jitter, the intrinsic delay and the mathematical expression that relates the BER with the distance. The user can also select the medium access control (MAC) protocol to be used by the device.
3. Results
3.1. Physical Layer
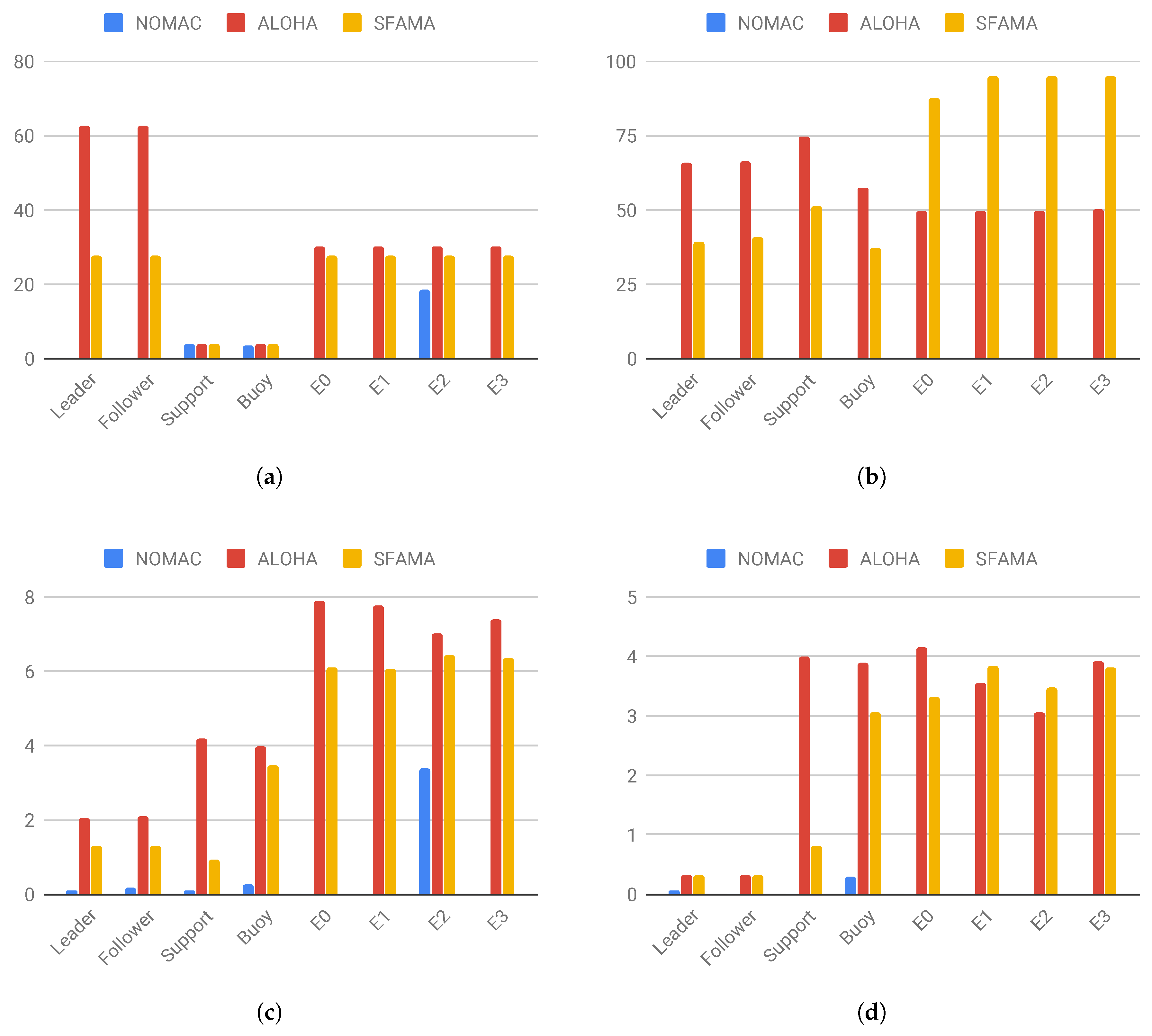
3.2. MAC Layer
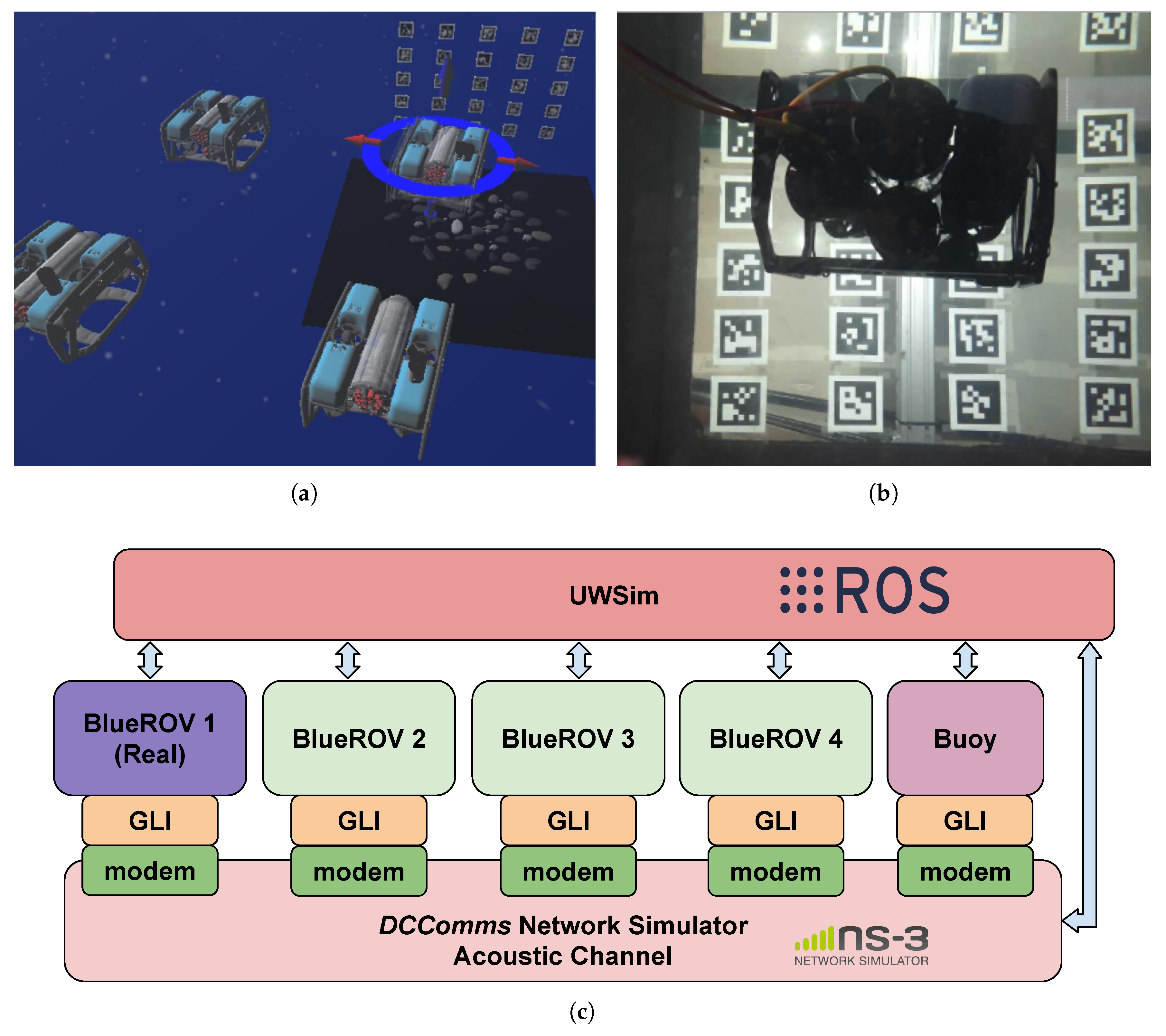
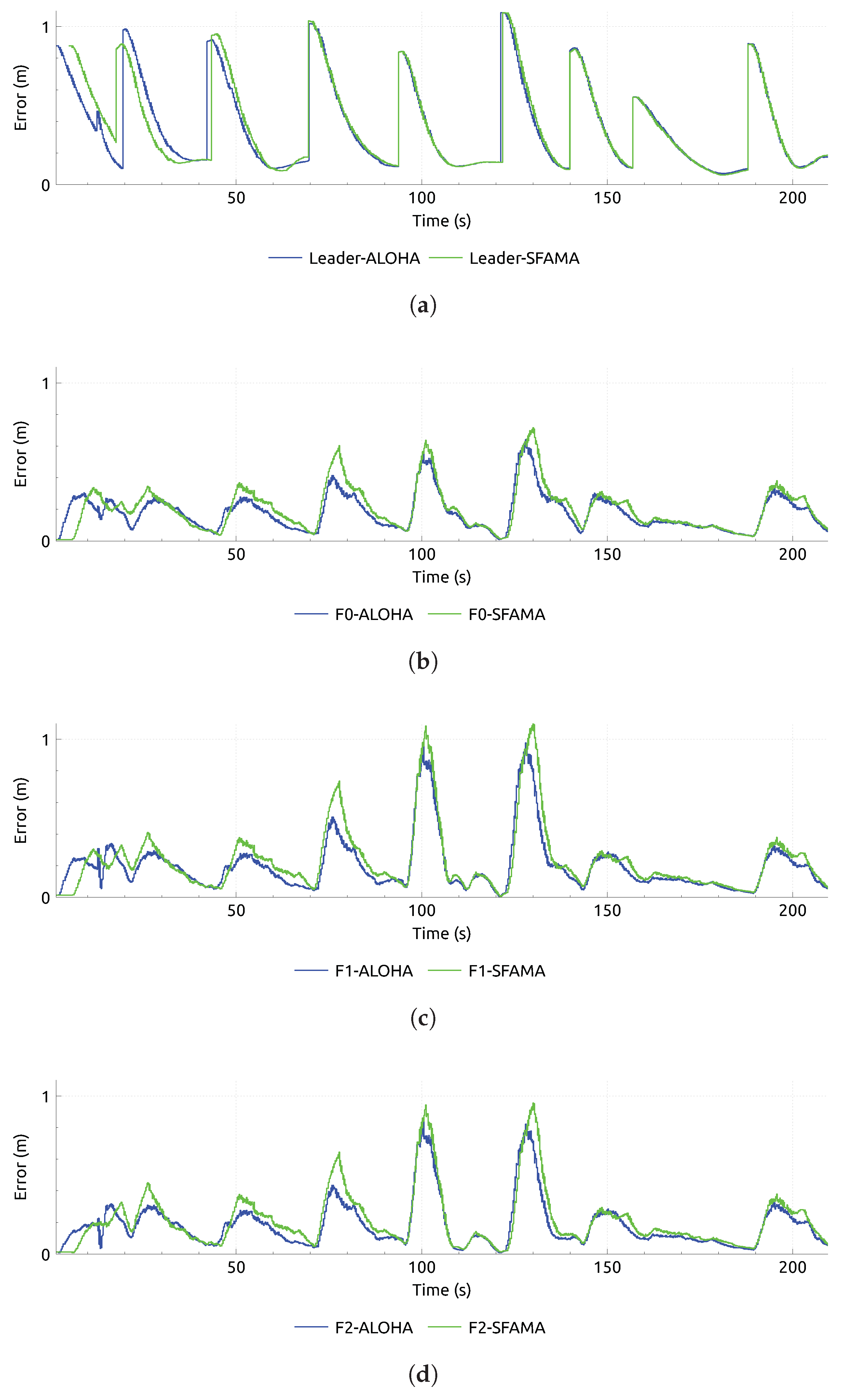
3.3. Remote ROV Team Control in HIL
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| API | Application Program Interface |
| AUV | Autonomous Underwater Vehicle |
| BER | Bit Error Rate |
| CS-ALOHA | Carrier Sense—Additive Links Online Hawaii Area |
| CTS | Clear To Send |
| FIFO | First Input First Output |
| GLI | Generic Link Interface |
| GPS | Global Positioning System |
| HIL | Hardware In the Loop |
| HRI | Human Robot Interface |
| I-AUV | Intervention Autonomous Underwater Vehicle |
| MAC | Medium Access Control |
| NS3 | Network Simulator 3 |
| RF | Radio Frequency |
| ROS | Robotic Operating System |
| ROV | Remotely Operated Vehicle |
| RTS | Request To Send |
| S-FAMA | Slotted Floor Acquisition Multiple Access |
| UAN | Underwater Acoustic Network |
| UWSim | UnderWater Simmulator |
| USWim-NET | UnderWater Simulator with Network modeling |
| UWSN | Underwater Wireless Sensor Network |
| VLC | Visual Light Communications |
References
- Che, X.; Wells, I.; Dickers, G.; Kear, P.; Gong, X. Re-Evaluation of RF Electromagnetic Communication in Underwater Sensor Networks. IEEE Commun. Mag. 2010, 48, 143–151. [Google Scholar] [CrossRef]
- Dea, J.; Radosevic, D.; Tran, N.; Chavez, J.; Neuner III, B. Land and Undersea Field Testing of Very Low Frequency RF Antennas and Loop Transceivers; Technical Report; SSC Pacific: San Diego, CA, USA, 2017. [Google Scholar]
- Shaw, A.; Al-Shamma’a, A.; Wylie, S.; Toal, D. Experimental Investigations of Electromagnetic Wave Propagation in Seawater. In Proceedings of the 2006 European Microwave Conference, 36th European, Manchester, UK, 10–15 September 2006; pp. 572–575. [Google Scholar] [CrossRef]
- Wireless for Subsea. Datasheet of Seatooth S100-L Wireless Subsea Controller. Technical Report. Available online: http://www.wfs-tech.com/wp-content/uploads/2017/11/Seatooth-S100-L-Extended-Range-17.11.1.pdf (accessed on 27 August 2019).
- Kaushal, H.; Kaddoum, G. Underwater Optical Wireless Communication. IEEE Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Farr, N.; Bowen, A.; Ware, J.; Pontbriand, C.; Tivey, M. An integrated, underwater optical /acoustic communications system. In Proceedings of the OCEANS 2010 IEEE, Sydney, NSW, Australia, 4–27 May 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Cossu, G.; Corsini, R.; Khalid, A.; Balestrino, S.; Coppelli, A.; Caiti, A.; Ciaramella, E. Experimental demonstration of high speed underwater visible light communications. In Proceedings of the 2013 2nd International Workshop on Optical Wireless Communications (IWOW), Newcastle upon Tyne, UK, 21–21 October 2013; pp. 11–15. [Google Scholar] [CrossRef]
- IRSLab. TWINBOT Research Project. 2018. Available online: http://www.irs.uji.es/twinbot/ (accessed on 27 August 2019).
- MERBOTS Research Project. Available online: http://www.irs.uji.es/merbots/ (accessed on 27 August 2019).
- Ribas, D.; Ridao, P.; Turetta, A.; Melchiorri, C.; Palli, G.; Fernandez, J.J.; Sanz, P.J. I-AUV Mechatronics Integration for the TRIDENT FP7 Project. IEEE/ASME Trans. Mechatronics 2015, 20, 2583–2592. [Google Scholar] [CrossRef] [Green Version]
- Das, A.P.; Thampi, S.M. Simulation tools for underwater sensor networks: a survey. Netw. Protoc. Algorithms 2017, 8, 41–55. [Google Scholar] [CrossRef]
- Xie, P.; Zhou, Z.; Peng, Z.; Yan, H.; Hu, T.; Cui, J.; Shi, Z.; Fei, Y.; Zhou, S. Aqua-Sim: An NS-2 based simulator for underwater sensor networks. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–7. [Google Scholar] [CrossRef]
- Martin, R.; Rajasekaran, S.; Peng, Z. Aqua-Sim Next Generation: An NS-3 Based Underwater Sensor Network Simulator. In Proceedings of the International Conference on Underwater Networks & Systems, WUWNET’17, Halifax, NS, Canada, 6–8 November 2017; ACM: New York, NY, USA, 2017; pp. 3:1–3:8. [Google Scholar] [CrossRef]
- Heidemann, J.; Stojanovic, M.; Zorzi, M. Underwater sensor networks: applications, advances and challenges. Philos. Trans. R. Soc. Lond. Math. Phys. Eng. Sci. 2012, 370, 158–175. Available online: http://xxx.lanl.gov/abs/http://rsta.royalsocietypublishing.org/content/370/1958/158.full.pdf (accessed on 27 August 2019). [CrossRef] [PubMed]
- Ayaz, M.; Baig, I.; Abdullah, A.; Faye, I. Review: A Survey on Routing Techniques in Underwater Wireless Sensor Networks. J. Netw. Comput. Appl. 2011, 34, 1908–1927. [Google Scholar] [CrossRef]
- Parrish, N.; Tracy, L.; Roy, S.; Arabshahi, P.; Fox, W. System Design Considerations for Undersea Networks: Link and Multiple Access Protocols. IEEE J. Sel. Areas Commun. 2008, 26, 1720–1730. [Google Scholar] [CrossRef] [Green Version]
- Prats, M.; Pérez, J.; Fernández, J.; Sanz, P. An open source tool for simulation and supervision of underwater intervention missions. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 2577–2582. [Google Scholar] [CrossRef]
- Centelles, D.; Soriano, A.; Martí, J.V.; Marın, R.; Sanz, P.J. UWSim-NET: An open-source framework for experimentation in communications for underwater robotics. In Proceedings of the IEEE Oceans Conference 2019, Marseille, France, 17–20 June 2019. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12 May 2009; Volume 3, p. 5. [Google Scholar]
- Immich, P.K.; Bhagavatula, R.S.; Pendse, D.R. Performance analysis of five interprocess communication mechanisms across UNIX operating systems. J. Syst. Softw. 2003, 68, 27–43. [Google Scholar] [CrossRef]
- Wireless for Subsea. Datasheet of Seatooth S100 Wireless Subsea Controller. Technical Report. Available online: http://www.wfs-tech.com/wp-content/uploads/2017/06/Seatooth-S100-17.-01.-1.pdf (accessed on 27 August 2019).
- Ribas, D.; Palomeras, N.; Ridao, P.; Carreras, M.; Mallios, A. Girona 500 AUV: From Survey to Intervention. Mechatronics IEEE/Asme Trans. 2012, 17, 46–53. [Google Scholar] [CrossRef]
- Palomeras, N.; El-Fakdi, A.; Carreras, M.; Ridao, P. COLA2: A Control Architecture for AUVs. IEEE J. Ocean. Eng. 2012, 37, 695–716. [Google Scholar] [CrossRef]
- Evologics. Datasheet of S2C R 7/17 Underwater Acoustic Modem. Technical Report. Available online: https://evologics.de/acoustic-modem/7-17/r-serie#downloads (accessed on 27 August 2019).
- Garrido-Jurado, S.; Muñoz-Salinas, R.; Madrid-Cuevas, F.; Marín-Jiménez, M. Automatic generation and detection of highly reliable fiducial markers under occlusion. Pattern Recognit. 2014, 47, 2280–2292. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RF | Acoustic | |||||||
|---|---|---|---|---|---|---|---|---|
| Leader | Follower | Support | Buoy | E0 | E1 | E2 | E3 | |
| CS-ALOHA | 62.5 | 62.5 | 4 | 4 | 30 | 30 | 30 | 30 |
| S-FAMA | 27.5 | 27.5 | 4 | 4 | 27.5 | 27.5 | 27.5 | 27.5 |
| Experiment | Description | Findings |
|---|---|---|
| Physical Layer | Two moving AUVs sending data at the same time | Demonstration of the correct modeling of end-to-end delay, packet loss, packet collisions and the transmission FIFOs. |
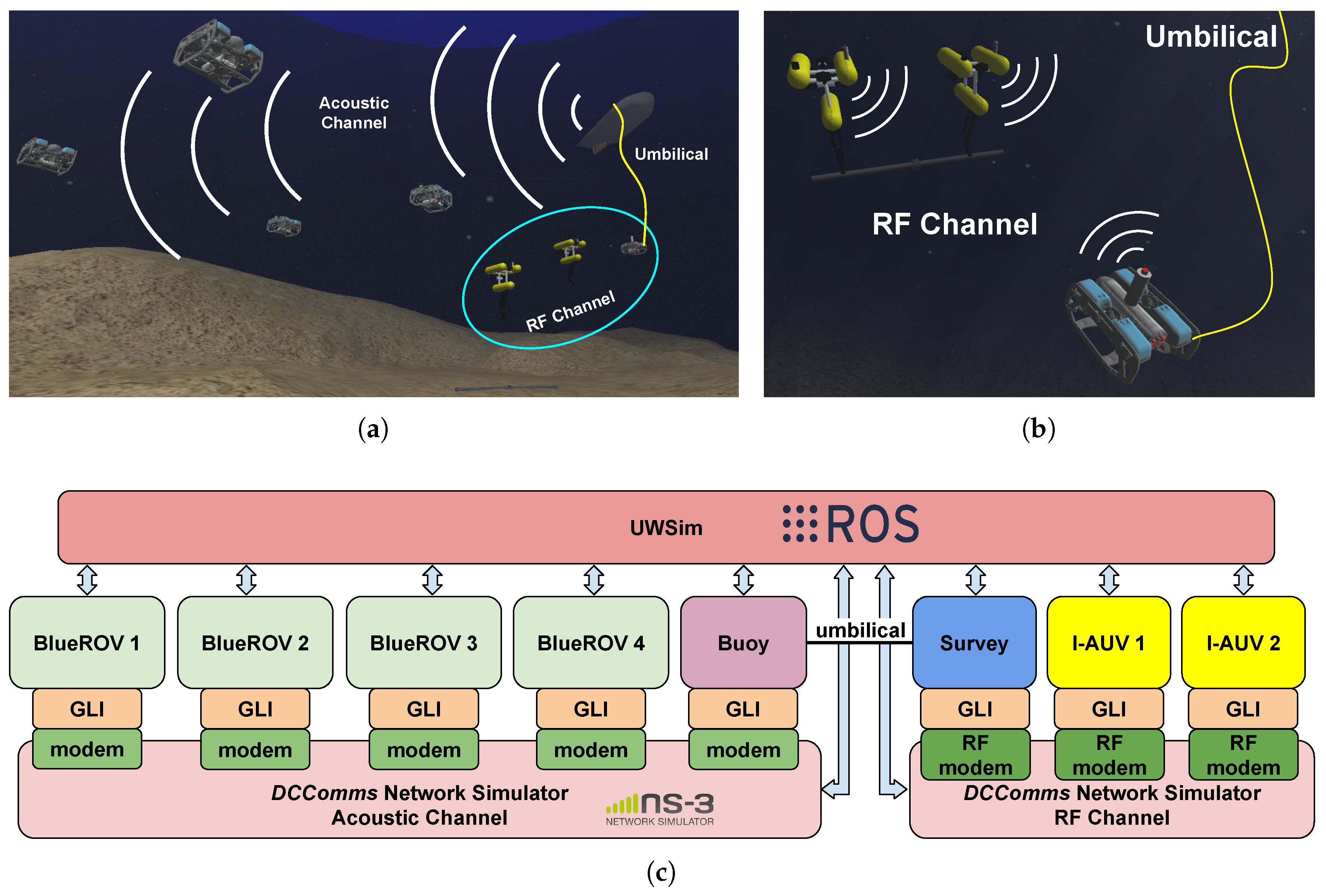
| MAC layer | Cooperative intervention with 4 AUVs sharing an acoustic channel and 3 I-AUVs sharing an RF channel. | Demonstration of the capability of UWSim-NET to model acoustic and RF devices, and the possibility to use different MAC protocols. |
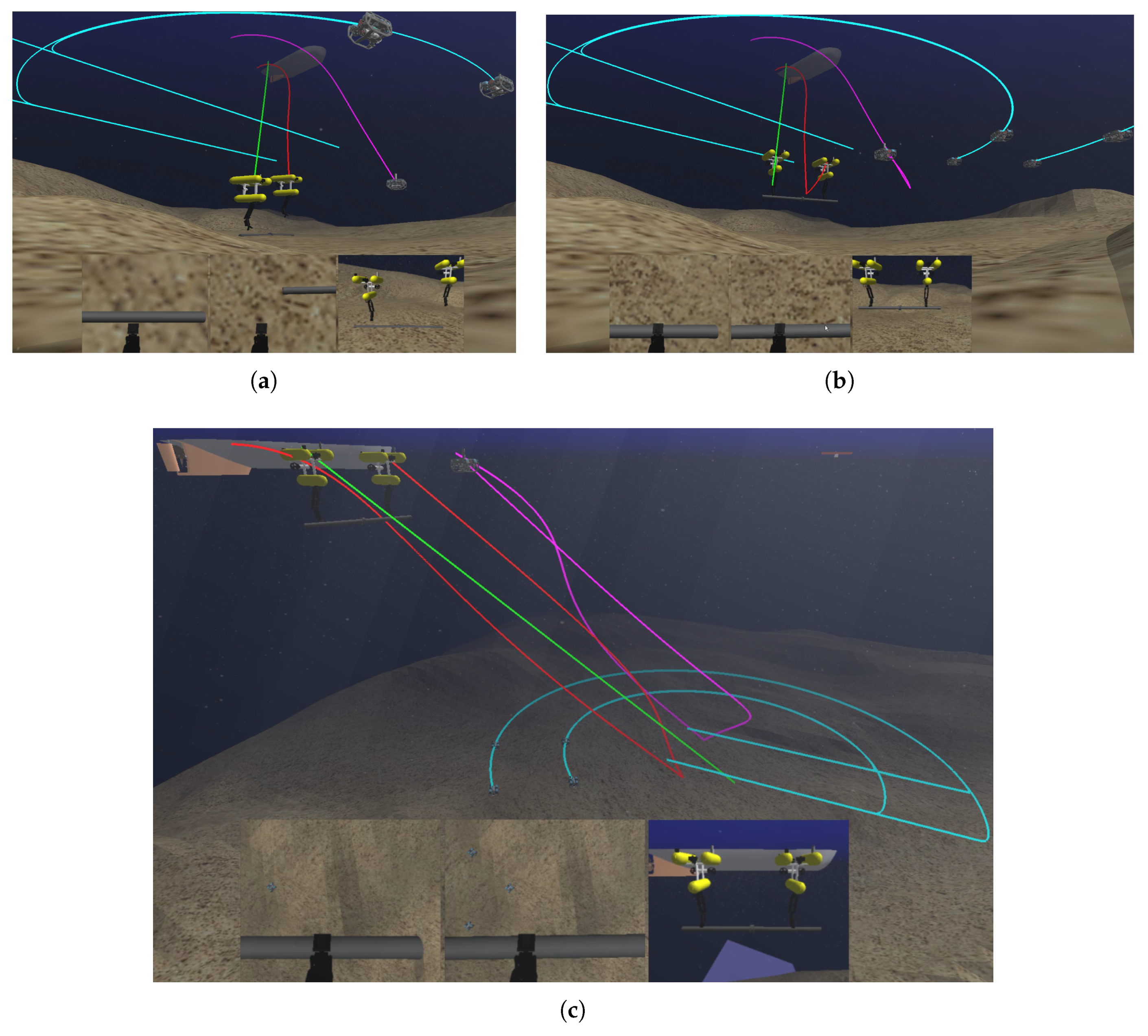
| HIL | Teleoperation of 4 AUVs, one of them being a real BlueROV in a water tank | Demonstration of the capability of UWSim-NET to perform HIL experiments in a real application, in which the positions of the AUVs vary arbitrarily during the experiment. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Centelles, D.; Soriano-Asensi, A.; Martí, J.V.; Marín, R.; Sanz, P.J. Underwater Wireless Communications for Cooperative Robotics with UWSim-NET. Appl. Sci. 2019, 9, 3526. https://doi.org/10.3390/app9173526
Centelles D, Soriano-Asensi A, Martí JV, Marín R, Sanz PJ. Underwater Wireless Communications for Cooperative Robotics with UWSim-NET. Applied Sciences. 2019; 9(17):3526. https://doi.org/10.3390/app9173526
Chicago/Turabian StyleCentelles, Diego, Antonio Soriano-Asensi, José Vicente Martí, Raúl Marín, and Pedro J. Sanz. 2019. "Underwater Wireless Communications for Cooperative Robotics with UWSim-NET" Applied Sciences 9, no. 17: 3526. https://doi.org/10.3390/app9173526
APA StyleCentelles, D., Soriano-Asensi, A., Martí, J. V., Marín, R., & Sanz, P. J. (2019). Underwater Wireless Communications for Cooperative Robotics with UWSim-NET. Applied Sciences, 9(17), 3526. https://doi.org/10.3390/app9173526