Experimental Investigation on Semi-Active Control of Base Isolation System Using Magnetorheological Dampers for Concrete Frame Structure



Abstract
:1. Introduction
2. Magnetorheological Isolation System
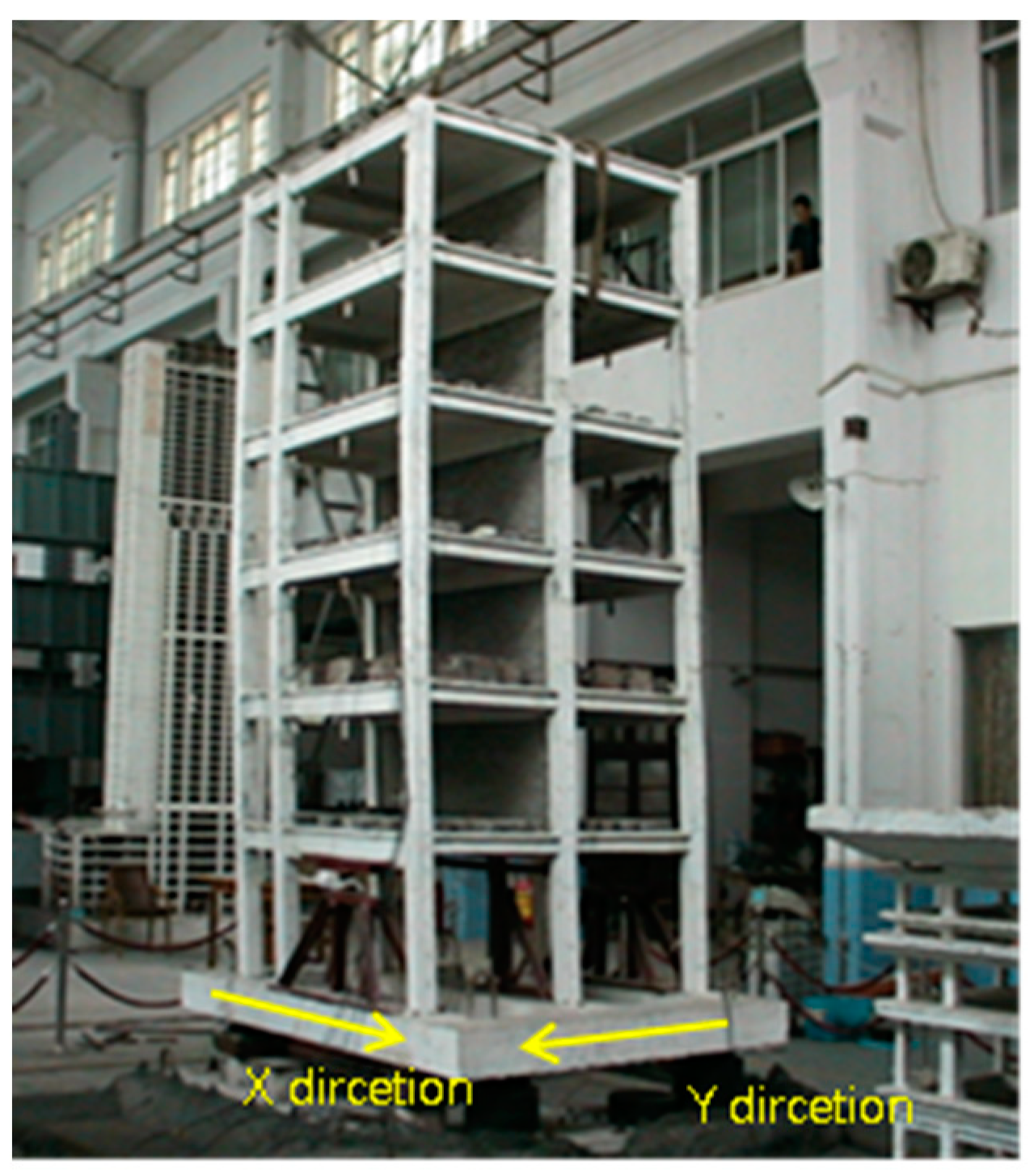
2.1. Test Model
2.2. Control Algorithm and Control Law
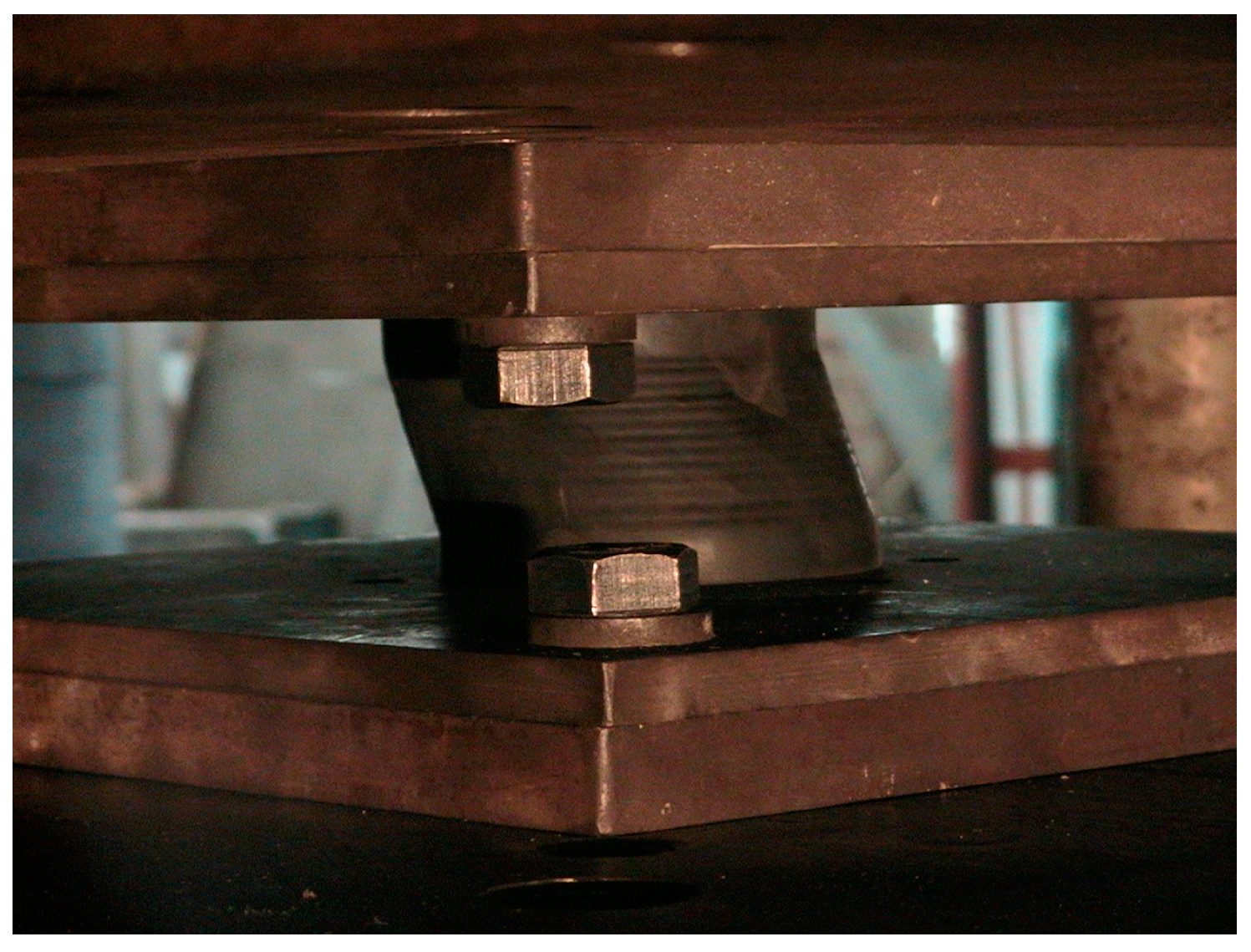
2.3. Isolation Bearing Device
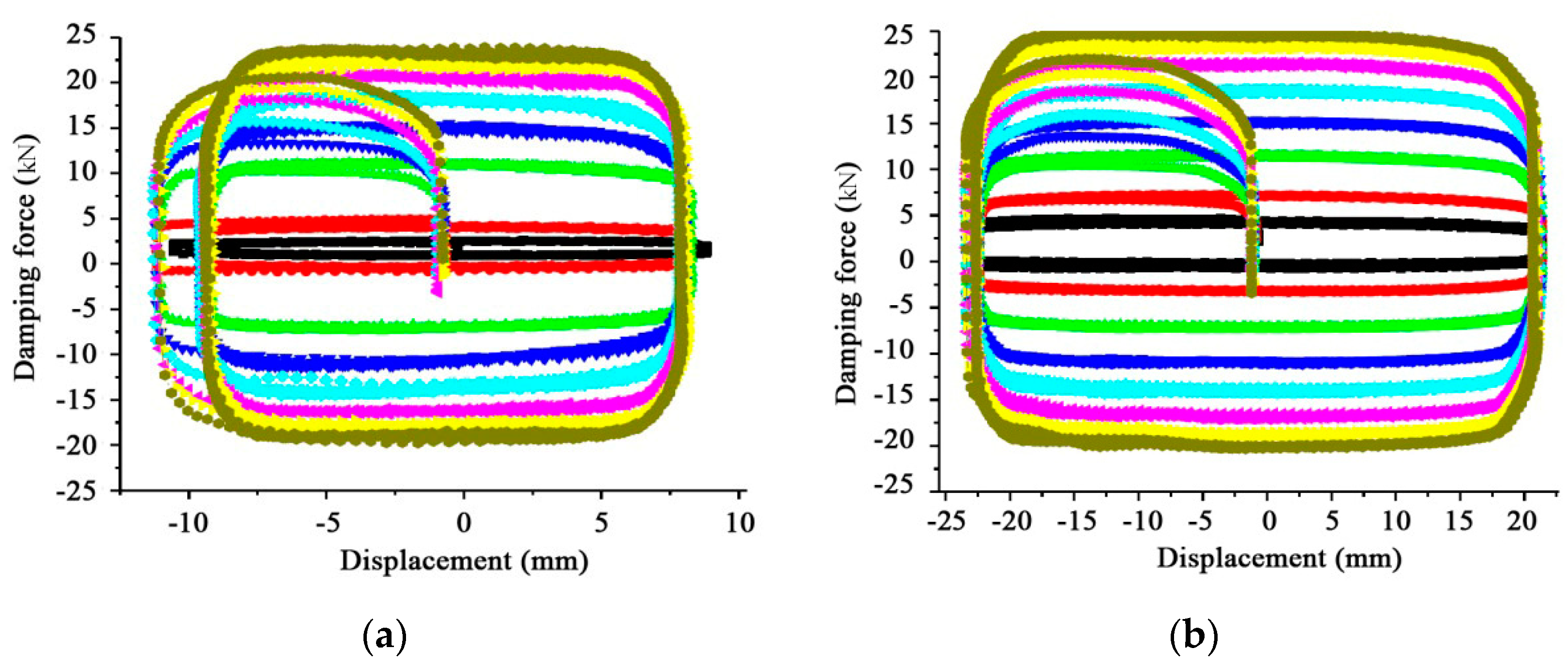
2.4. Magnetorheological (MR) Damper
3. Experimental Scheme
3.1. Loading Scheme
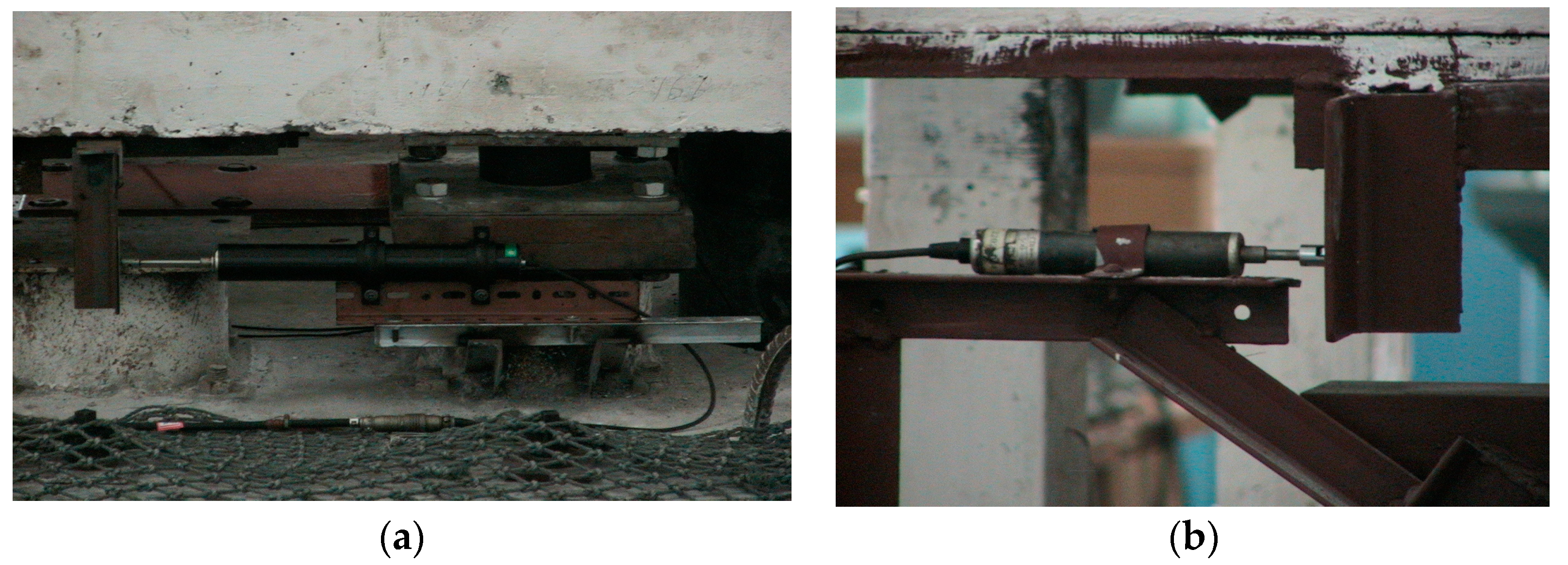
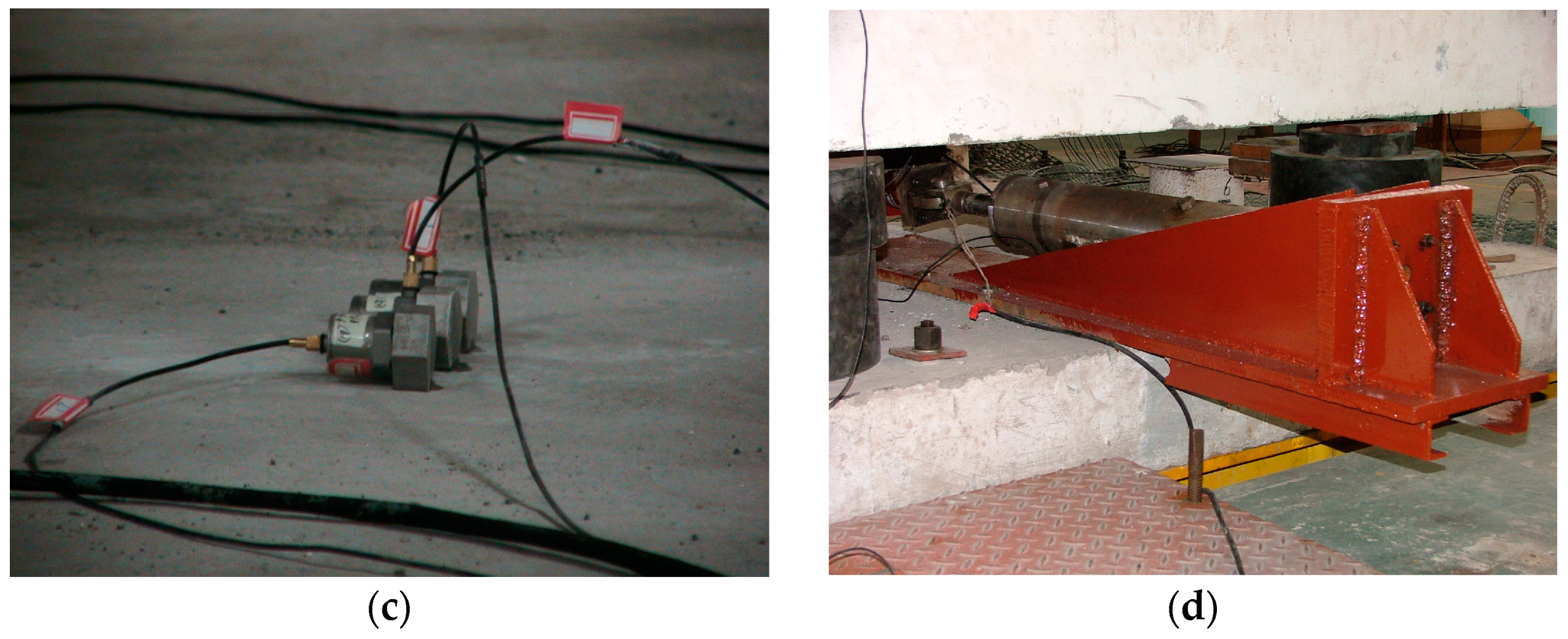
3.2. Measurement Scheme
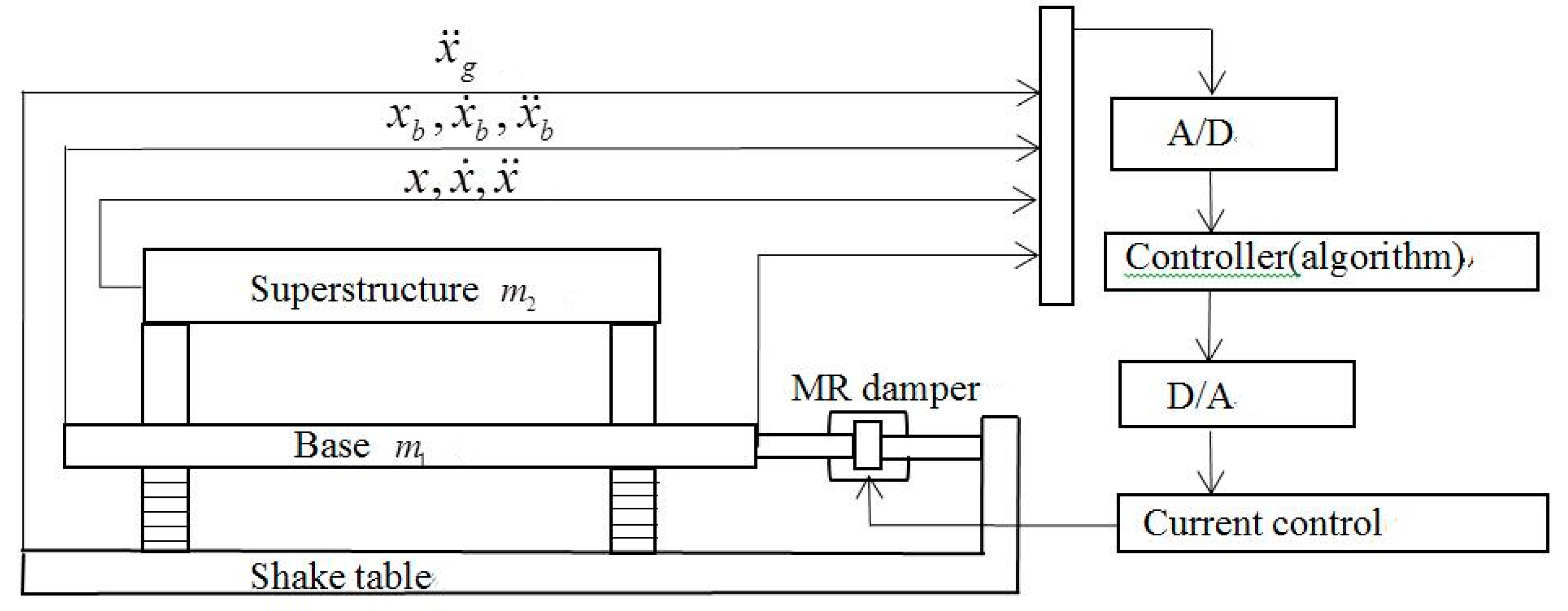
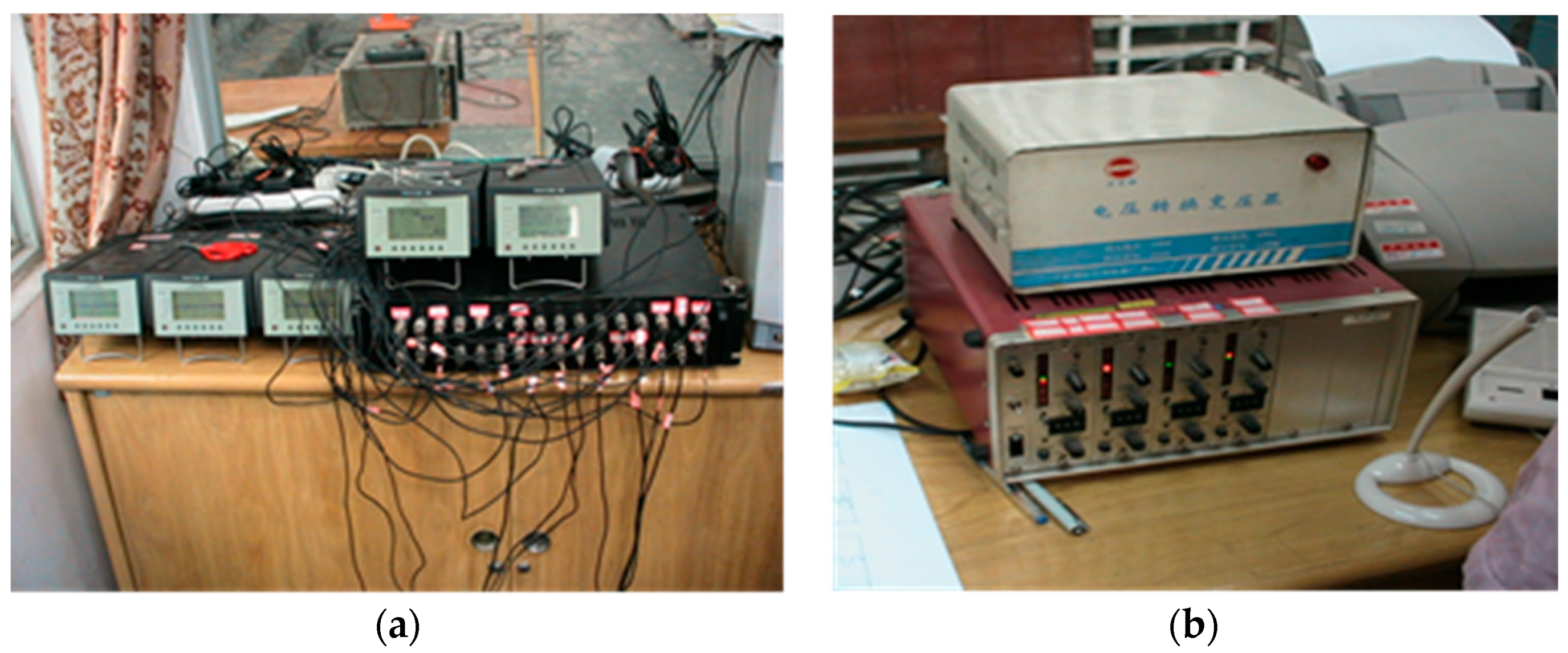
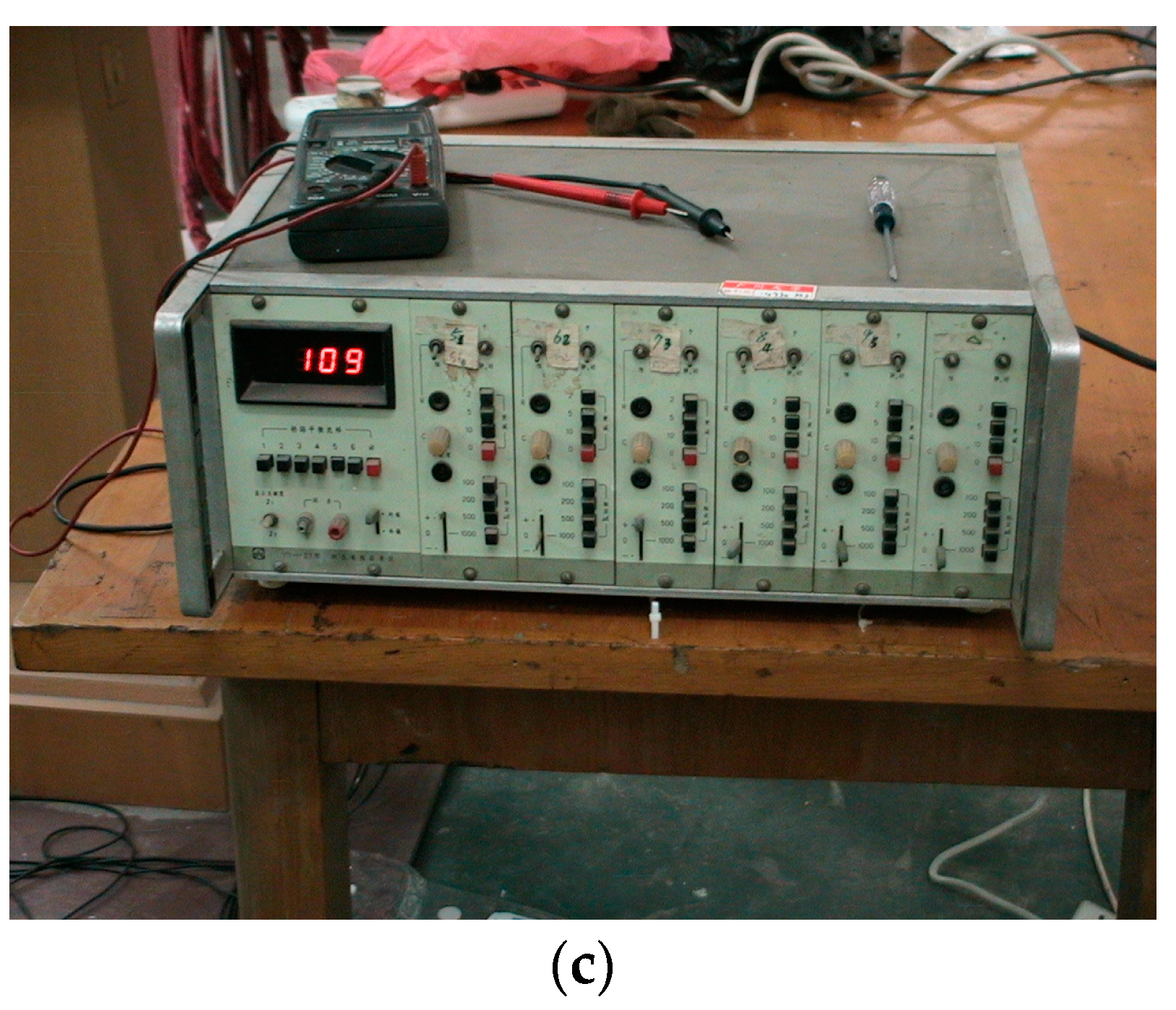
3.3. Data Acquisition and Structural Response Feedback Scheme
- A/D part (acquisition)
- Input channel: 32 channels single ended/16 channel differential
- Input range: 0~10V, −5~+5 V
- Overpressure range: −12~+12 V
- D/A part (issue order)
- Resolution: 12bit
- Output channel: 4 way
- Output range: −12~+12 V
- Maximum sampling frequency: 250 Hz
4. Numerical and Experimental Investigation of MR Semi-Active Control
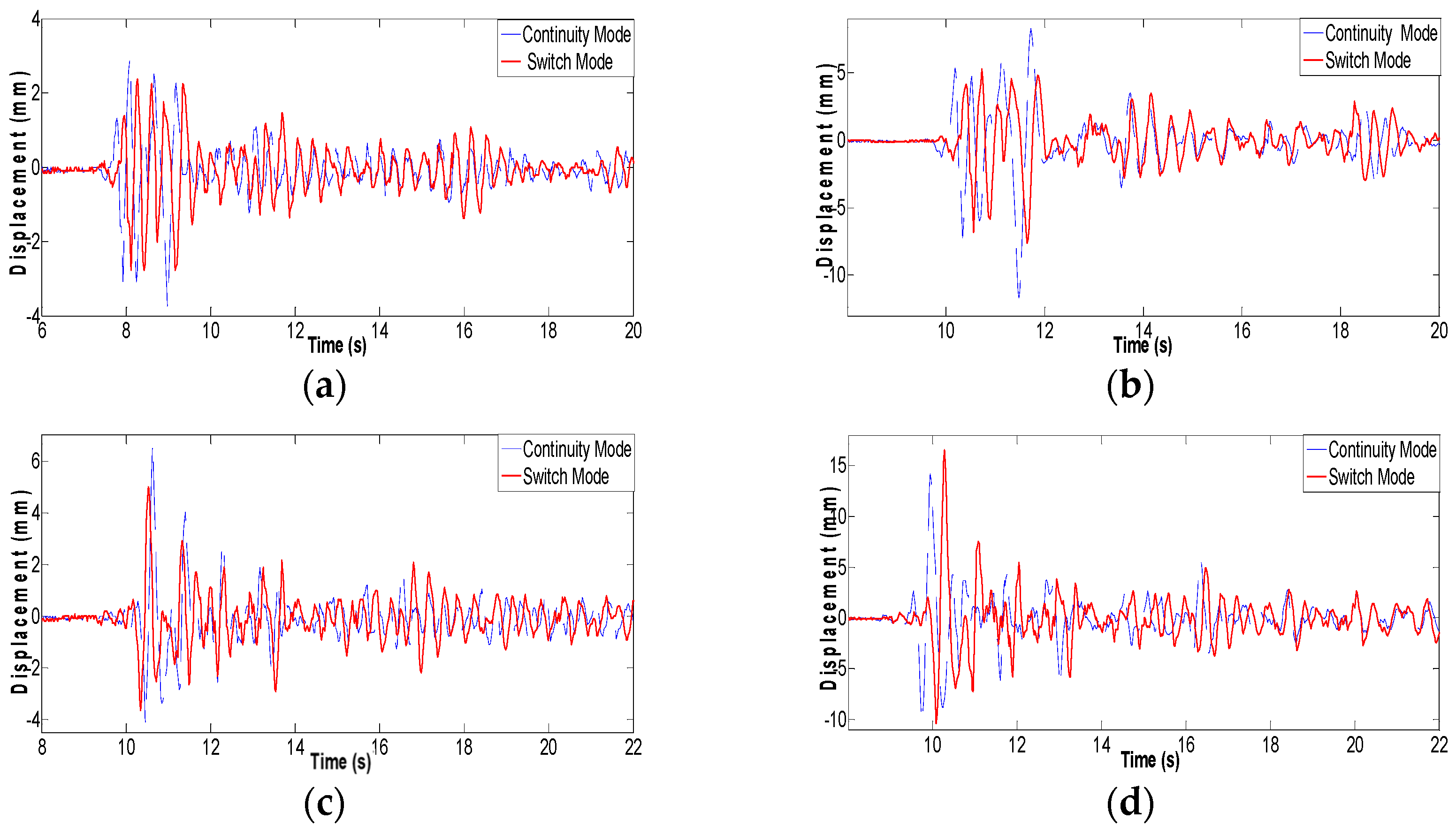
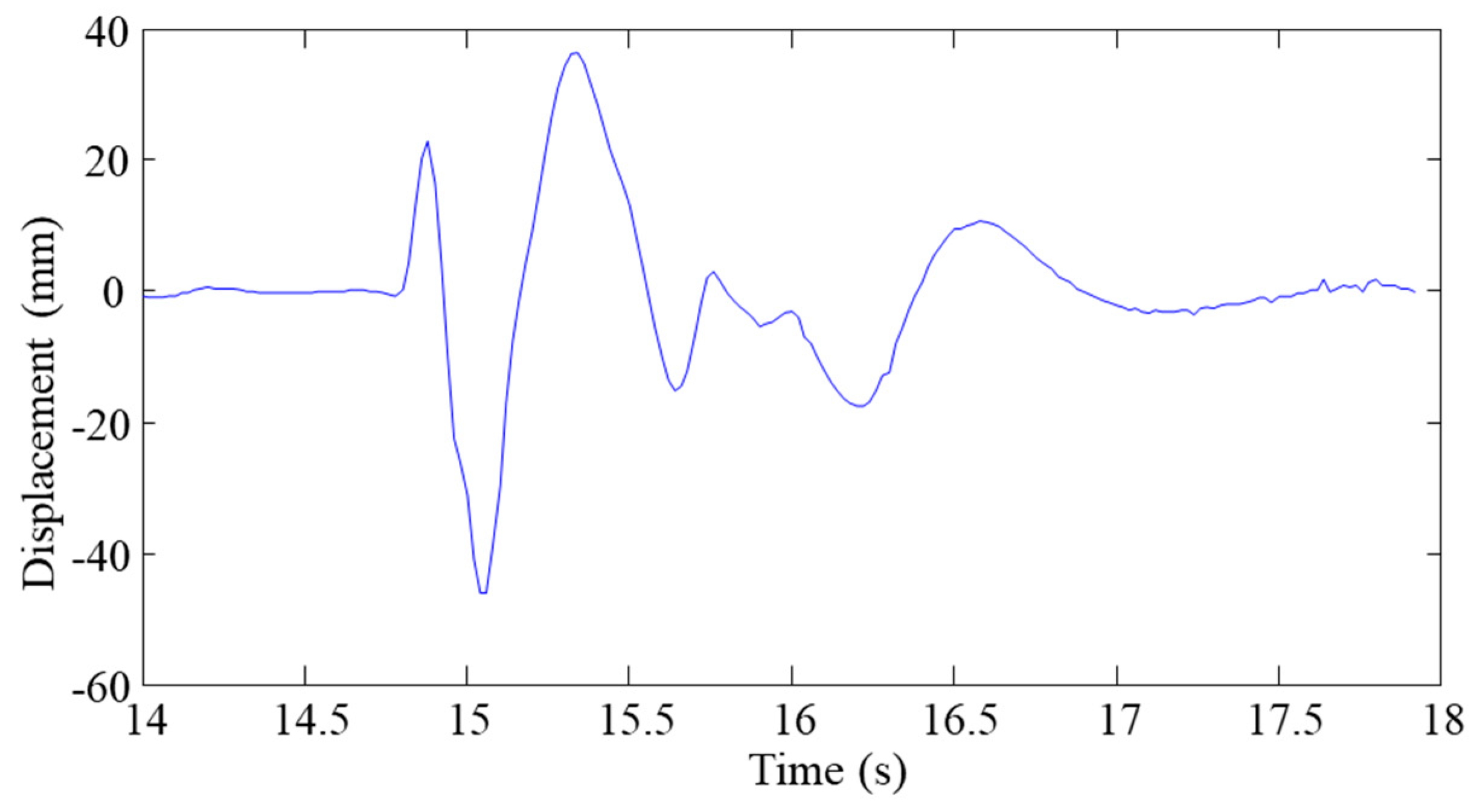
4.1. Displacement Response
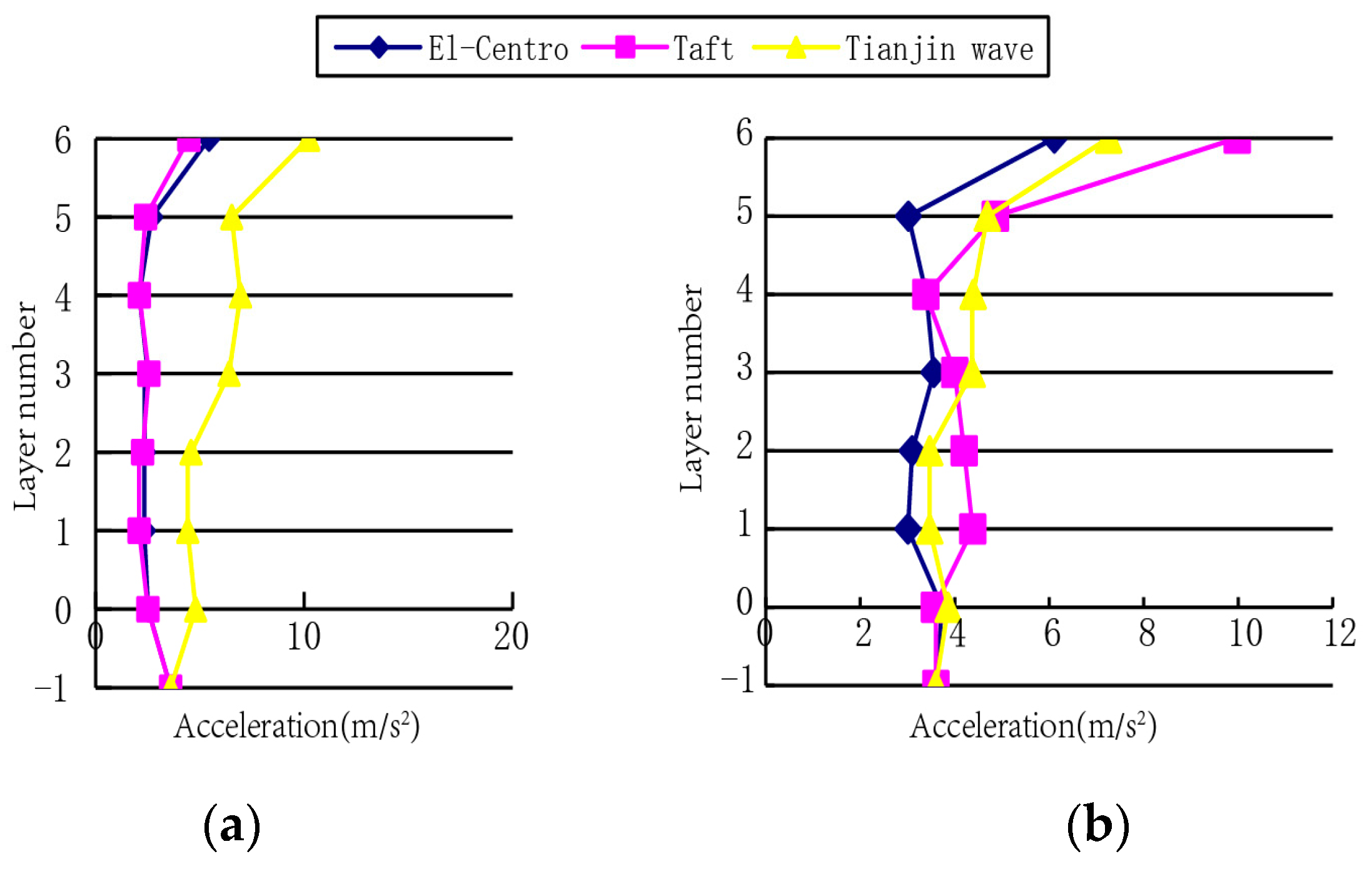
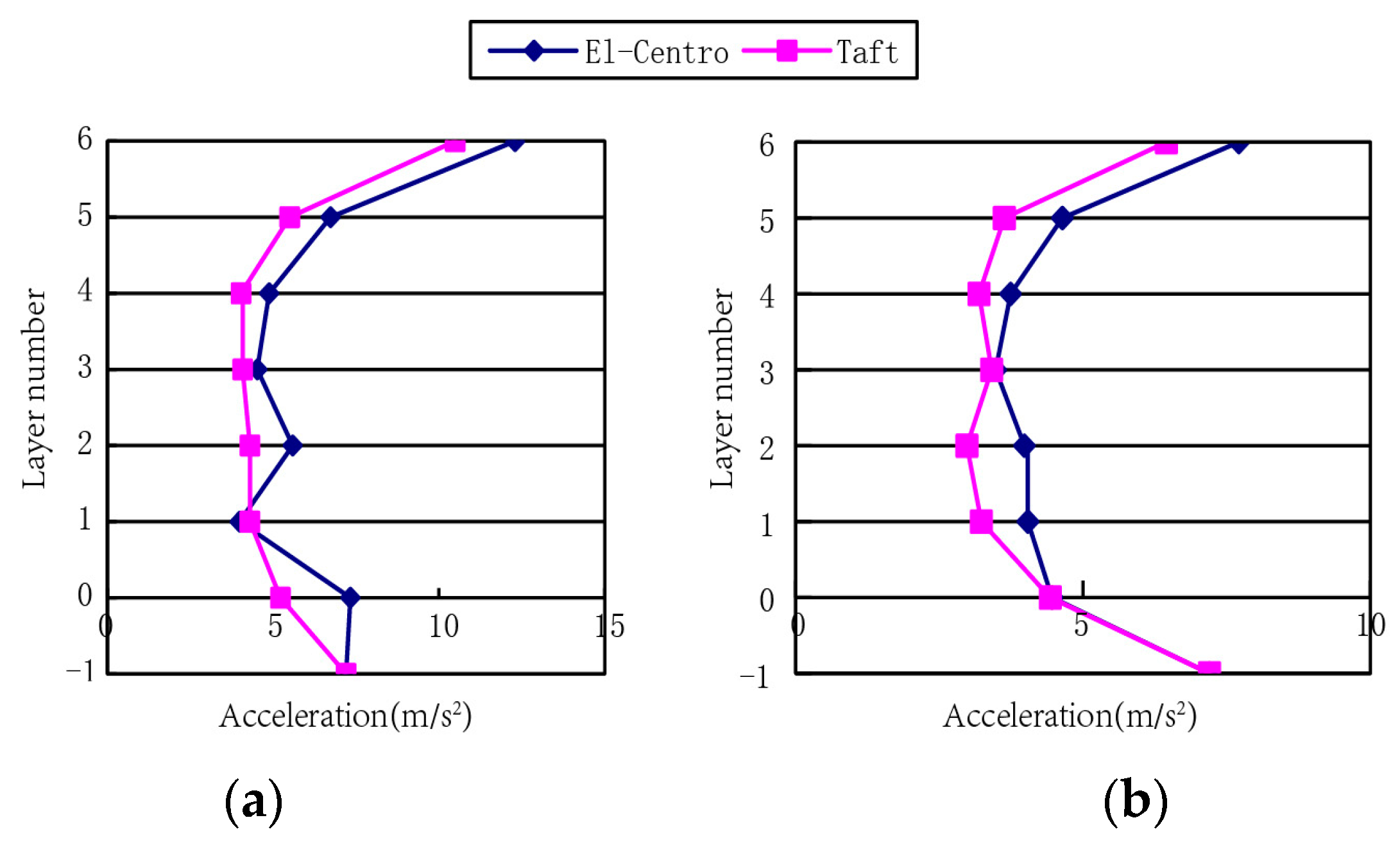
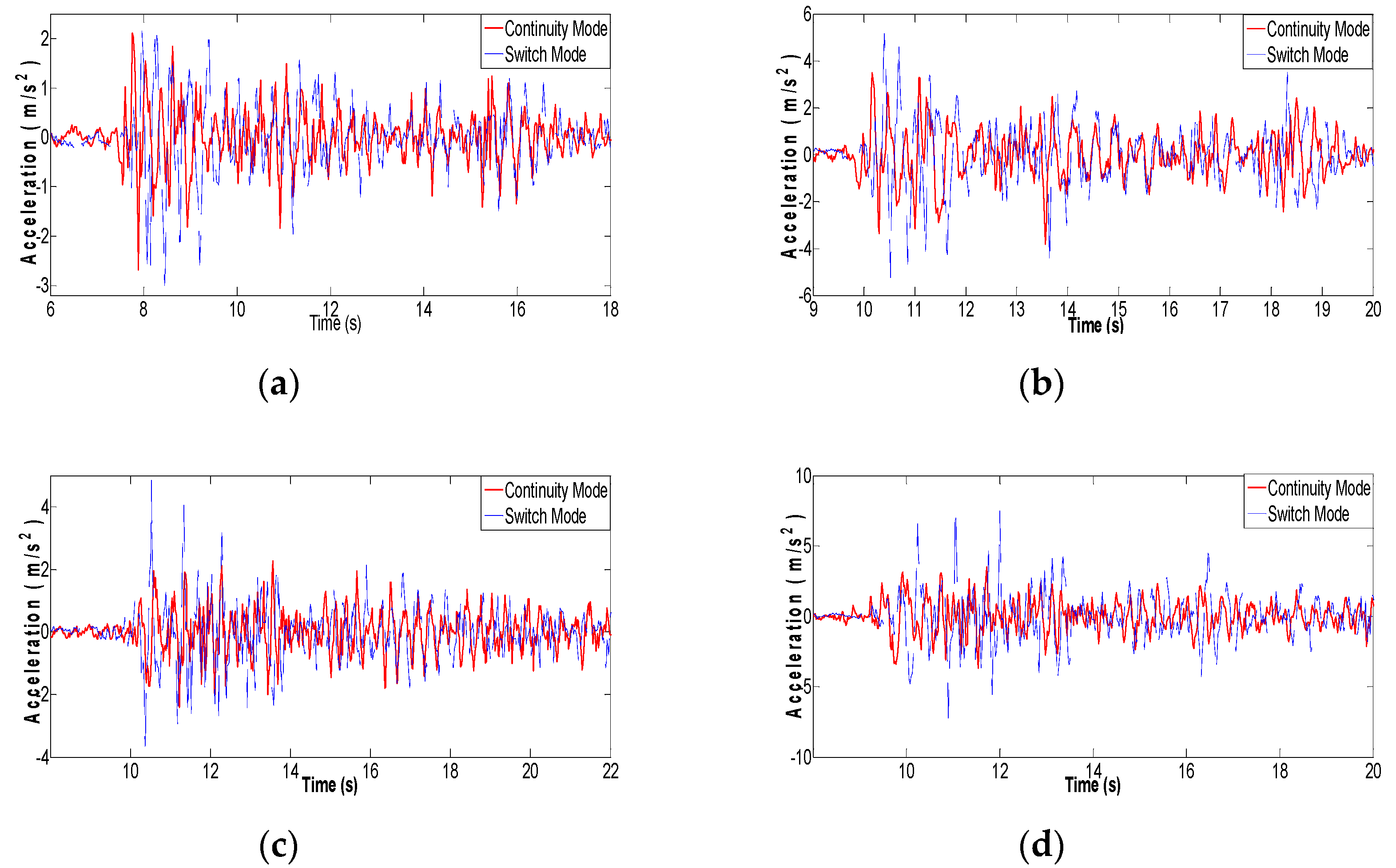
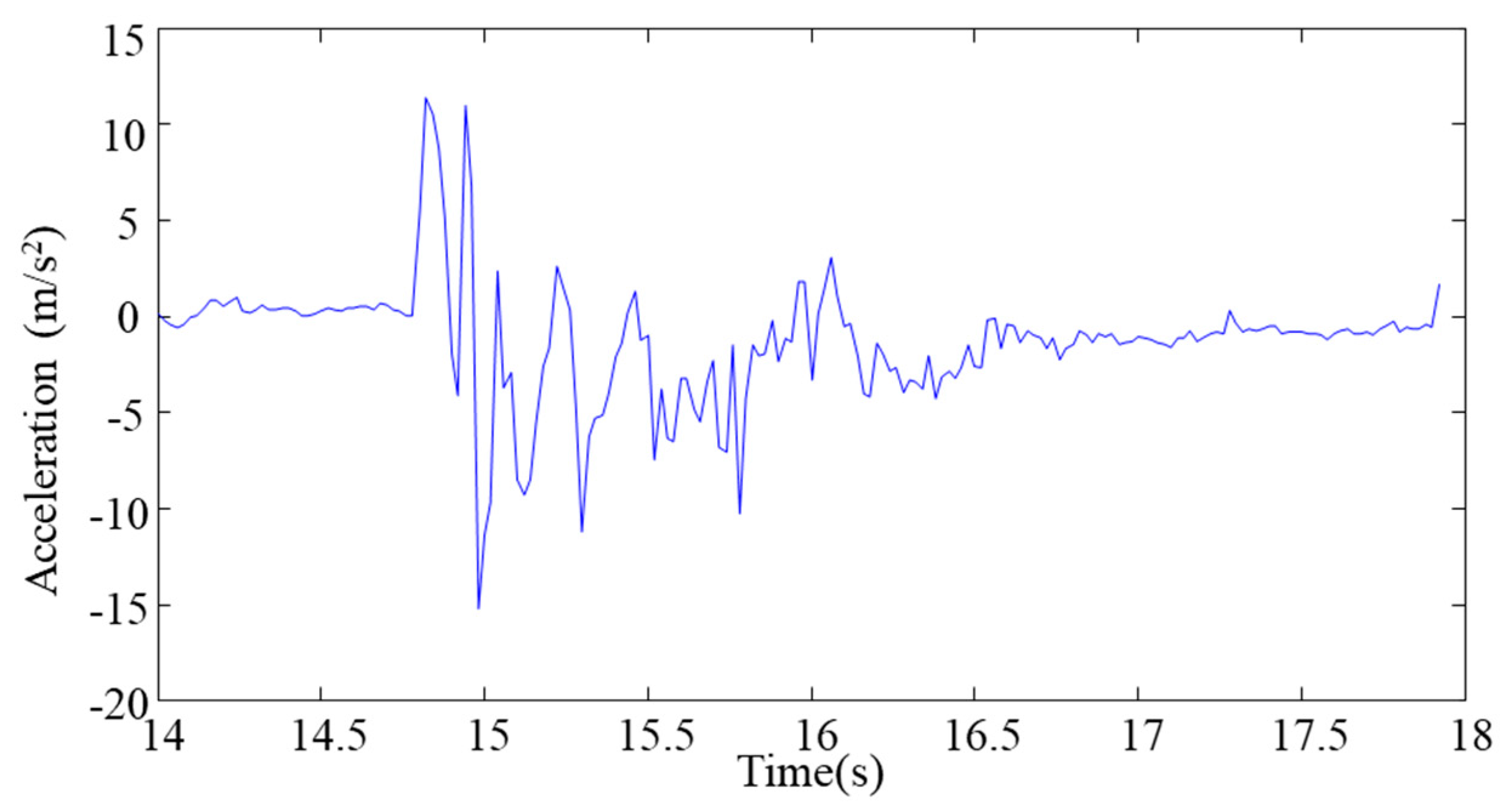
4.2. Acceleration Response
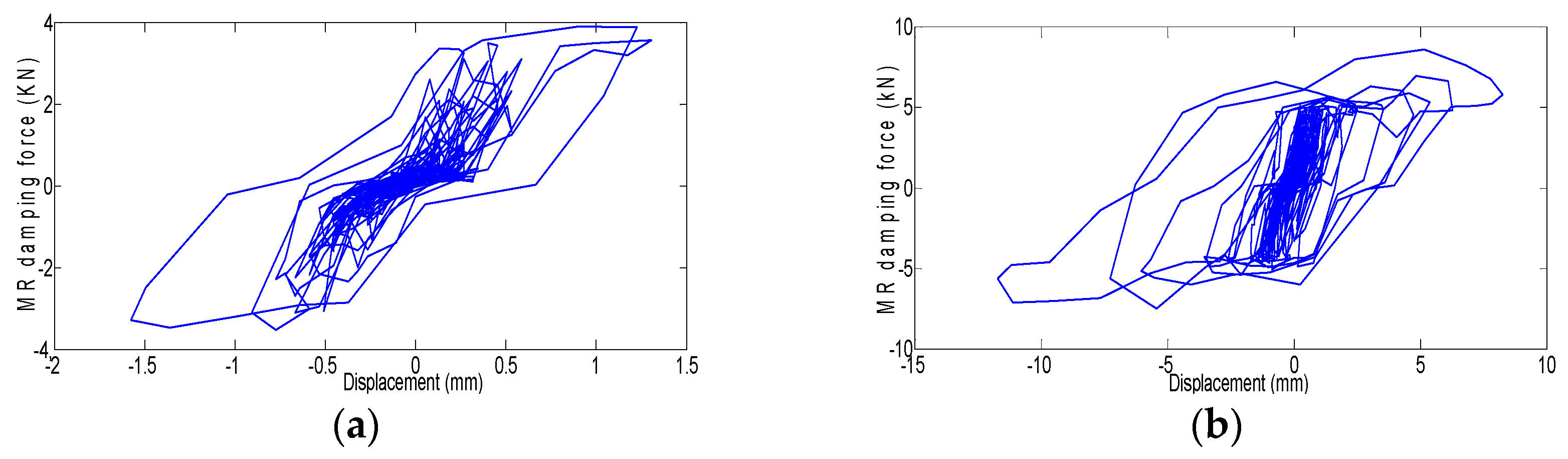
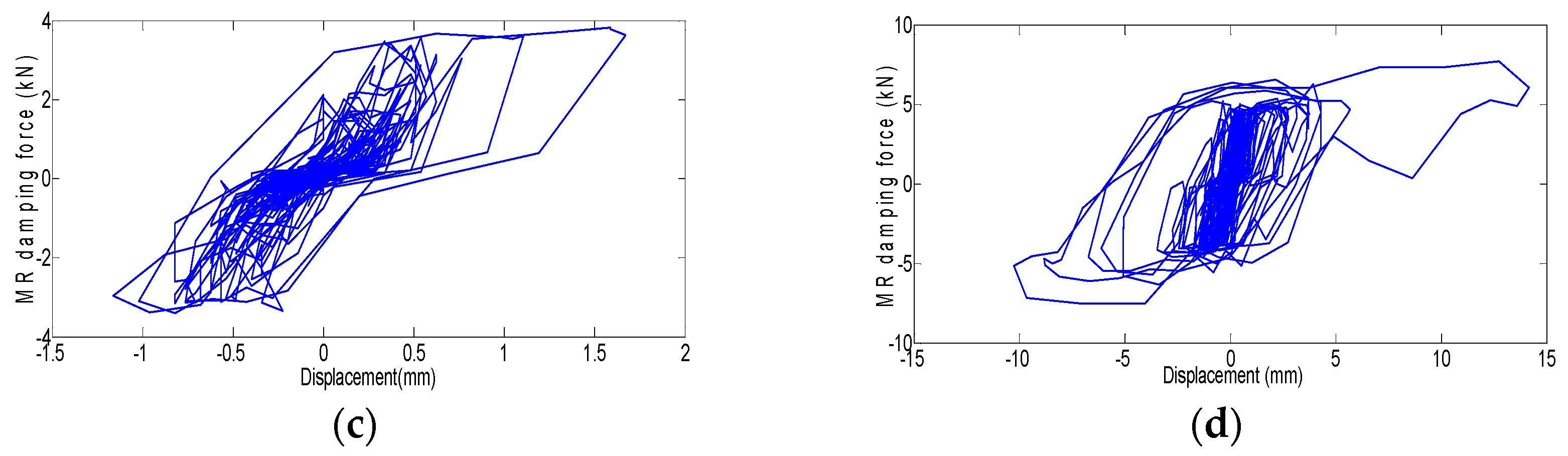
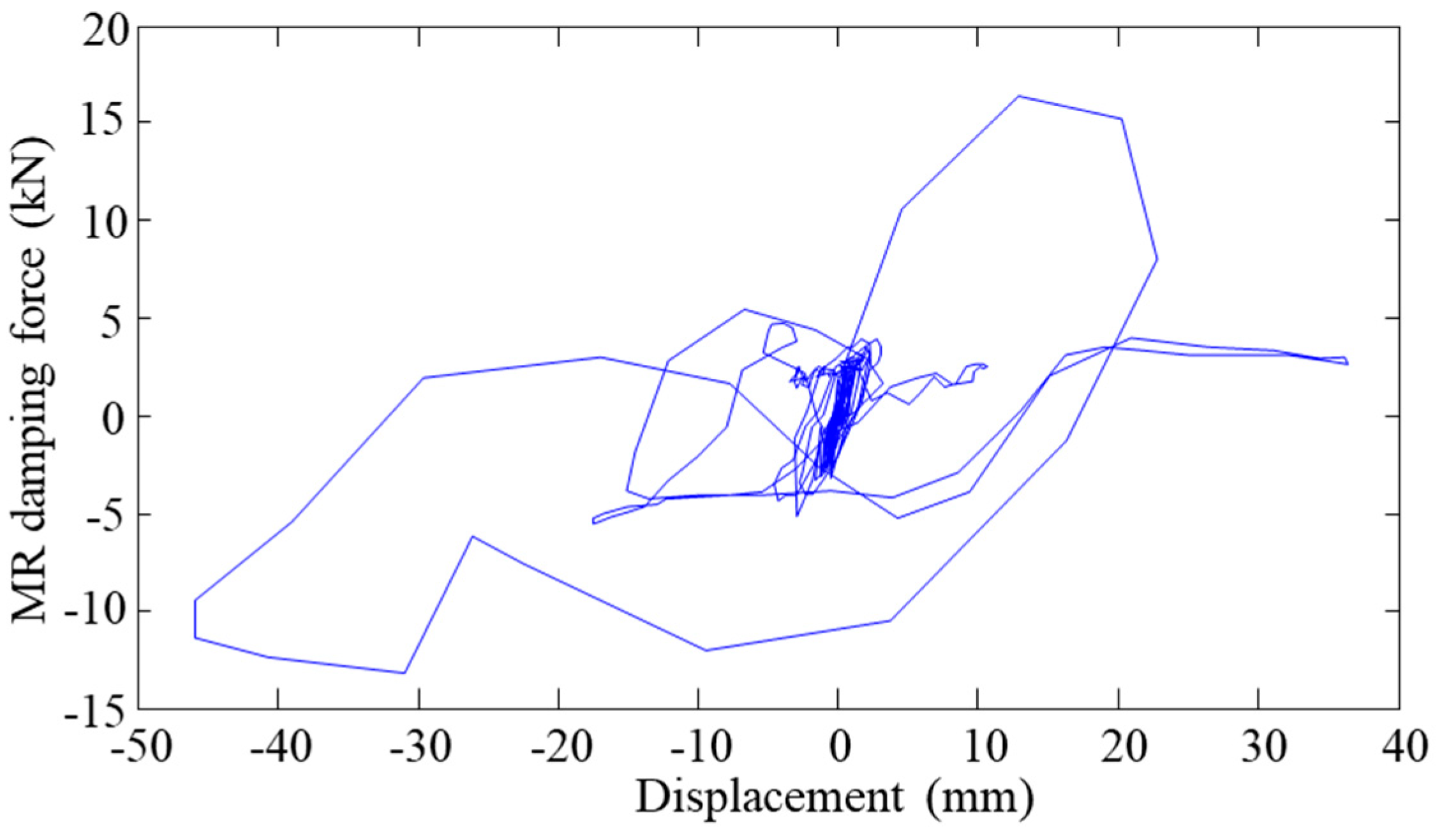
4.3. MR Damper Response
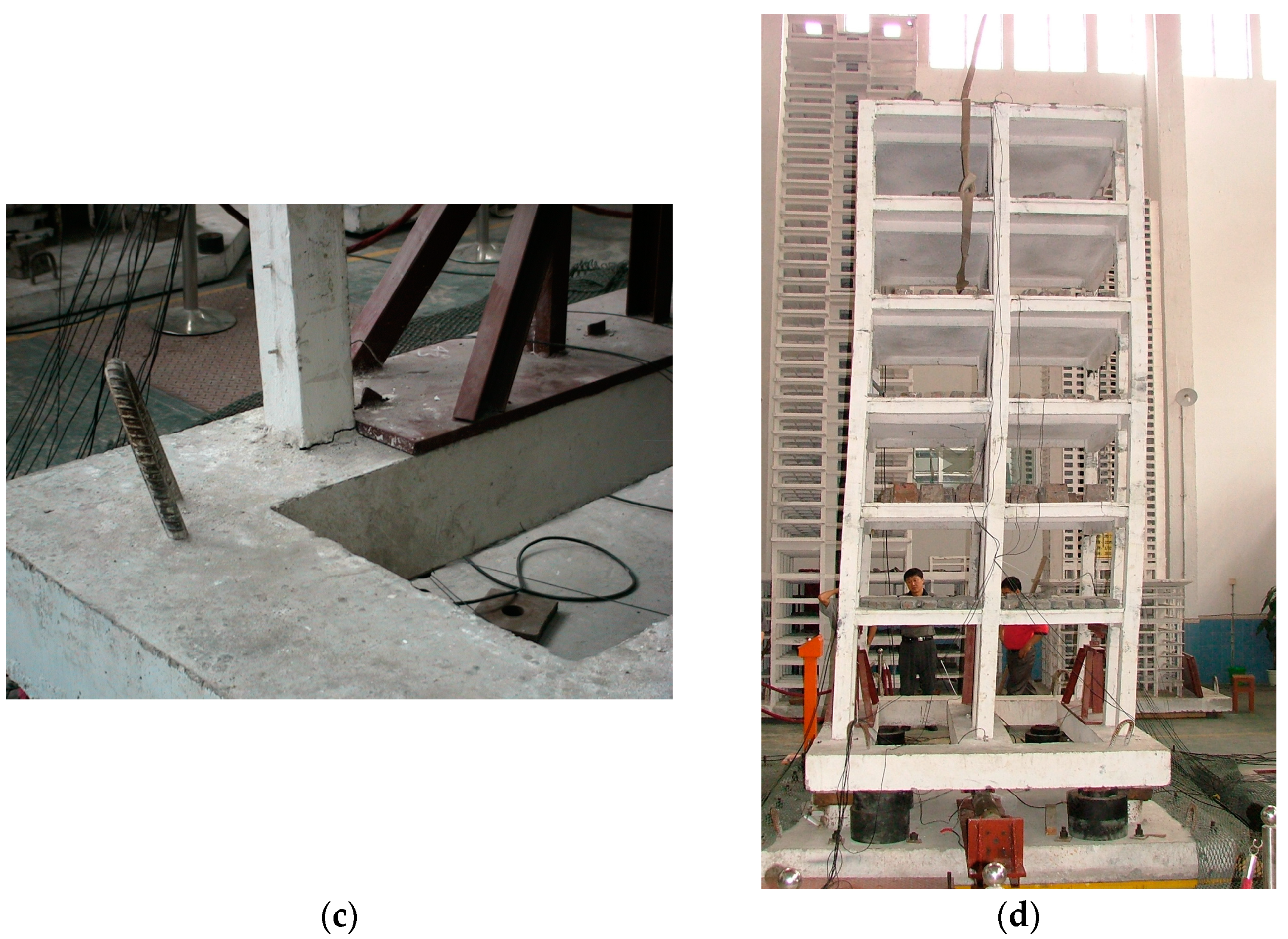
4.4. Structural Destructive Test
4.5. Comparison between MR Isolation and LRB Isolation System
5. Conclusions
- Semi-active isolation system is shown to be adaptable to the external seismic input intensity, which may change the energy consumption mode with respect to external earthquake input magnitudes. It can effectively limit the deformation of the isolation layer as well as to reduce the acceleration response of the superstructure. Therefore, it demonstrates better damping effect than passive LRB isolation system.
- The LQR control algorithm has been proven to be effective in terms of controlling the real time structural vibrations. Regarding the two control strategies, the switching control strategy is simpler than the continuous control strategy. However, in the switching control strategy, the deformation of the isolation layer is limited, and the acceleration of the upper structure is enlarged.
- The MR damper responds more quickly to external excitations. When the structure is subjected to nine-degree earthquake, the damping force of the damper can reach the maximum capacity instantaneously to guarantee the energy dissipation performance. This can ensure the overall stability of the structure during super large earthquakes.
Author Contributions
Funding
Conflicts of Interest
References
- Soong, T.T. Passive and Active Structural Vibration Control in Civil Engineering; Michalakis, C.C., Ed.; Springer: Wien, Austria, 1994; Volume 345. [Google Scholar]
- Myslimaj, B.; Gamble, S.; Chin-Quee, D.; Davies, A.; Breukelman, B. Base isolation technologies for seismic protection of museum artifacts. In Proceedings of the 2003 IAMFA Annual Conference, San Francisco, CA, USA, 21–24 September 2003. [Google Scholar]
- Jung, H.J.; Jang, D.D.; Lee, H.J.; Lee, I.W.; Cho, S.W. Feasibility test of adaptive passive control system using MR fluid damper with electromagnetic induction part. J. Eng. Mech. 2000, 136, 254–259. [Google Scholar] [CrossRef]
- Wu, M.; Samali, B. Shake table testing of a base isolated model. Eng. Struct. 2002, 24, 1203–1215. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, H. Swing Vibration Control of Suspended Structure Using Active Rotary Inertia Driver System: Parametric Analysis and Experimental Verification. Appl. Sci. 2019, 9, 3144. [Google Scholar] [CrossRef]
- Eem, S.H.; Jung, H.J.; Koo, J.H. Seismic performance evaluation of an MR elastomer-based smart base isolation system using real-time hybrid simulation. Smart Mater. Struct. 2009, 22, 055003. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, N.; Qi, A. Seismic Performance of a New Structural Design Solution for First-Story Isolated RC Buildings with Coupled Beam-Column Connections. Appl. Sci. 2019, 9, 177. [Google Scholar] [CrossRef]
- Falborski, T.; Jankowski, R. Experimental Study on Effectiveness of a Prototype Seismic Isolation System Made of Polymeric Bearings. Appl. Sci. 2017, 7, 808. [Google Scholar] [CrossRef]
- Hong, S.C.; Hur, D.J. Dynamic Behavior of a Simple Rolling Seismic Isolator with a Position Restoring Device. Appl. Sci. 2018, 8, 1910. [Google Scholar] [CrossRef]
- Yu, Y.; Li, J.; Li, Y.; Li, S.; Li, H.; Wang, W. Comparative Investigation of Phenomenological Modeling for Hysteresis Responses of Magnetorheological Elastomer Devices. Int. J. Mol. Sci. 2019, 20, 3216. [Google Scholar] [CrossRef]
- Yu, Y.; Royel, S.; Li, J.; Li, Y.; Ha, Q. Magnetorheological elastomer base isolator for earthquake response mitigation on building structures: Modeling and second-order sliding mode control. Earthq. Struct. 2016, 11, 943–966. [Google Scholar] [CrossRef]
- Li, Y.; Li, J.; Li, W.; Du, H. A state-of-the-art review on magnetorheological elastomer devices. Smart Mater. Struct. 2014, 23, 123001. [Google Scholar] [CrossRef]
- Zhang, C.W.; Ou, J.P. Control Structure Interaction of Electromagnetic Mass Damper System for Structural Vibration Control. J. Eng. Mech. 2008, 134, 428–437. [Google Scholar] [CrossRef]
- Gu, X.; Yu, Y.; Li, Y.; Li, J.; Askari, M.; Samali, B. Experimental study of semi-active magnetorheological elastomer base isolation system using optimal neuro fuzzy logic control. Mech. Syst. Signal Process. 2019, 119, 380–398. [Google Scholar] [CrossRef]
- Yan, B.; Ma, H.; Jian, B.; Wang, K.; Wu, C. Nonlinear dynamics analysis of a bi-state nonlinear vibration isolator with symmetric permanent magnets. Nonlinear Dyn. 2019, 97, 1–21. [Google Scholar] [CrossRef]
- Sato, E.; Furukawa, S.; Kakehi, A.; Nakashima, M. Full-scale shaking table test for examination of safety and functionality of base-isolated medical facilities. Earthq. Eng. Struct. Dyn. 2011, 40, 1435–1453. [Google Scholar] [CrossRef]
- Liu, W.; Tian, K.; Wei, L.; He, W.; Yang, Q. Earthquake response and isolation effect analysis for separation type three-dimensional isolated structure. Bull. Earthq. Eng. 2018, 16, 6335–6364. [Google Scholar] [CrossRef]
- Wang, T.; Wang, H.; Liu, W.; Zhang, Y. Shaking Table test Research on Large Height-Width Ratio Rubber Bearings Isolation Structure (1). J. Harbin Inst. Technol. 2006, 38, 2060–2064. [Google Scholar]
- Wang, T.; Wang, H.; Liu, W.; Zhang, Y. Shaking Table test Research on Large Height-Width Ratio Rubber Bearings Isolation Structure (2). J. Harbin Inst. Technol. 2007, 39, 196–200. [Google Scholar]
- Du, Y.; Wang, X.; Zhu, X. Overturning collapse simulation of isolation structure under near-fault seismic motion considering potential pounding. Build. Struct. 2013, 39, 56–59. [Google Scholar]
- Huang, B.; Zhang, H.; Wang, H.; Song, G. Passive base isolation with superelastic nitinol SMA helical springs. Smart Mater. Struct. 2014, 23, 065009. [Google Scholar] [CrossRef]
- Cai, W.; Yu, B.; Kaewunruen, S. Shaking Table Tests of Suspended Structures Equipped with Viscous Dampers. Appl. Sci. 2019, 9, 2616. [Google Scholar] [CrossRef]
- Naderpour, H.; Naji, N.; Burkacki, D.; Jankowski, R. Seismic Response of High-Rise Buildings Equipped with Base Isolation and Non-Traditional Tuned Mass Dampers. Appl. Sci. 2019, 9, 1201. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, H.; Qiu, C.; Zhao, X. Seismic Behavior of Superelastic Shape Memory Alloy Spring in Base Isolation System of Multi-Story Steel Frame. Materials 2019, 12, 997. [Google Scholar] [CrossRef] [PubMed]
- Spencer, B., Jr.; Dyke, S.J.; Sain, M.K.; Carlson, J. Phenomenological model for magnetorheological dampers. J. Eng. Mech. 1997, 123, 230–238. [Google Scholar] [CrossRef]
- Xu, H.B.; Zhang, C.W.; Li, H.; Tan, P.; Ou, J.P.; Zhou, F.L. Active mass driver control system for suppressing wind-induced vibration of the Canton Tower. Smart Struct. Syst. 2014, 13, 281–303. [Google Scholar] [CrossRef]
- Zhang, C.W. Control Force Characteristics of Different Control Strategies for the Wind-excited 76-story Benchmark Building Structure. Adv. Struct. Eng. 2014, 17, 543–559. [Google Scholar] [CrossRef]
- Zhang, C.W.; Ou, J.P. Modeling and Dynamical Performance of the Electromagnetic Mass Driver System for Structural Vibration Control. Eng. Struct. 2015, 82, 93–103. [Google Scholar] [CrossRef]
- Xu, H.B.; Zhang, C.W.; Li, H.; Ou, J.P. Real-time hybrid simulation approach for performance validation of structural active control systems: A linear motor actuator based active mass driver case study. Struct. Control Health Monit. 2014, 21, 574–589. [Google Scholar] [CrossRef]
- Yang, G.; Spencer, B.F., Jr.; Carlson, J.D.; Sain, M.K. Large-scale MR fluid dampers: Modeling and dynamic performance considerations. Eng. Struct. 2002, 24, 309–323. [Google Scholar] [CrossRef]
- Yoshida, O.; Dyke, S.J.; Giacosa, L.M.; Truman, K.Z. Experimental verification of torsional response control of asymmetric buildings using MR dampers. Earthq. Eng. Struct. Dyn. 2003, 32, 2085–2105. [Google Scholar] [CrossRef]
- Zhang, C.W.; Ou, J.; Zhang, J. Parameter Optimization and Analysis of Vehicle Suspension System Controlled by Magnetorheological Fluid Dampers. Struct. Control Health Monit. 2006, 13, 885–896. [Google Scholar] [CrossRef]
- Zhang, C.W.; Li, L.Y.; Ou, J.P. Swinging motion control of suspended structures: Principles and applications. Struct. Control Health Monit. 2010, 17, 549–562. [Google Scholar] [CrossRef]
- Ramallo, J.C.; Johnson, E.A.; Spencer, B.F., Jr. “Smart” base isolation systems. J. Eng. Mech. 2002, 128, 1088–1099. [Google Scholar] [CrossRef]
- Yoshioka, H.; Ramallo, J.C.; Spencer, B.F., Jr. “Smart” base isolation strategies employing magnetorheological dampers. J. Eng. Mech. 2002, 128, 540–551. [Google Scholar] [CrossRef]
- Oliveira, F.; Botto, M.A.; Morais, P.; Suleman, A. Semi-active structural vibration control of base-isolated buildings using magnetorheological dampers. J. Low Freq. Noise Vib. Act. Control 2018, 37, 565–576. [Google Scholar] [CrossRef]
- Fan, Y.C.; Loh, C.H.; Yang, J.N.; Lin, P.Y. Experimental performance evaluation of an equipment isolation using MR dampers. Earthq. Eng. Struct. Dyn. 2009, 38, 285–305. [Google Scholar] [CrossRef]
- Sahasrabudhe, S.; Nagarajaiah, S. Experimental study of sliding base-isolated buildings with magnetorheological dampers in near-fault earthquakes. J. Struct. Eng. 2005, 131, 1025–1034. [Google Scholar] [CrossRef]
- Asai, T.; Chang, C.M.; Spencer, B.F., Jr. Real-time hybrid simulation of a smart base-isolated building. J. Eng. Mech. 2014, 141, 04014128. [Google Scholar] [CrossRef]
- Yoshida, S.; Fujitani, H.; Mukai, Y.; Ito, M. Real-time hybrid simulation of semi-active control using shaking table: Proposal and verification of a testing method for mid-story isolated buildings. Jpn. Archit. Rev. 2018, 1, 221–234. [Google Scholar] [CrossRef]
- Zhang, C.W.; Alam, Z.; Sun, L.; Su, Z.X.; Samali, B. Fibre Bragg grating sensor-based damage response monitoring of an asymmetric reinforced concrete shear wall structure subjected to progressive seismic loads. Struct. Control Health Monit. 2019, 26. [Google Scholar] [CrossRef]
- Fu, W.; Zhang, C.; Sun, L.; Askari, M.; Samali, B.; Chung, K.L.; Sharafi, P. Experimental investigation of a base isolation system incorporating MR dampers with the high-order single step control algorithm. Appl. Sci. 2017, 7, 344. [Google Scholar] [CrossRef]
- Zhang, R.; Phillips, B.M.; Taniguchi, S.; Ikenaga, M.; Ikago, K. Shake table real-time hybrid simulation techniques for the performance evaluation of buildings with inter-story isolation. Struct. Control Health Monit. 2017, 24, e1971. [Google Scholar] [CrossRef]
- Yan, B.; Ma, H.; Zheng, W.; Jian, B.; Wang, K.; Wu, C. Nonlinear electromagnetic shunt damping for nonlinear vibration isolators. IEEE/ASME Trans. Mechatron. 2019, 24, 1851–1860. [Google Scholar] [CrossRef]
- Lin, P.Y.; Roschke, P.N.; Loh, C.H. Hybrid base-isolation with magnetorheological damper and fuzzy control. Struct. Control Health Monit. 2007, 14, 384–405. [Google Scholar] [CrossRef]
- Jung, H.J.; Choi, K.M.; Spencer, B.F., Jr.; Lee, I.W. Application of some semi-active control algorithms to a smart base-isolated building employing MR damper. Struct. Control Health Monit. 2006, 13, 693–704. [Google Scholar] [CrossRef]
- Zhang, C.W.; Ou, J.P. Control strategies and experimental verifications of the electromagnetic mass damper system for structural vibration control. Earthq. Eng. Eng. Vib. 2008, 7, 181–192. [Google Scholar] [CrossRef]
- Askari, M.; Yu, Y.; Zhang, C.W.; Samali, B. Real-Time Tracking of Structural Stiffness Reduction with Unknown Inputs, using Self-Adaptive Recursive Least Square and Curvature Change Techniques. Int. J. Struct. Stab. Dyn. 2019, 6, 26. [Google Scholar] [CrossRef]
- Jansen, L.M.; Dyke, S.J. Semiactive control strategies for MR dampers: Comparative study. J. Eng. Mech. 2000, 126, 795–803. [Google Scholar] [CrossRef]
- Ouyang, Y.; Shan, J.; Shi, W.; Spencer, B.F. Adaptive control for smart-actuated base isolation structures regarding various reference-tracking strategies. Eng. Struct. 2019, 198, 109574. [Google Scholar] [CrossRef]
- Wang, T. Research on the Overturn Effect of Rubber Isolation Structure. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2004. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Earthquake Magnitude | Max Acc. 0.126 g | Max Acc. 0.36 g | Max Acc. 0.72 g | |||||
|---|---|---|---|---|---|---|---|---|
| Earthquake ground motion | El Centro earthquake | Taft earthquake | Tianjin earthquake | El Centro earthquake | Taft earthquake | Tianjin earthquake | El Centro earthquake | Taft earthquake |
| Isolation layer | 1.57 (2.09) | 1.67 (2.50) | 3.52 (6.70) | 3.76 (7.74) | 6.66 (8.52) | 28.2 (20.0) | 11.71 (15.4) | 14.16 (17.9) |
| First floor | 1.04 | 1.13 | 1.67 | 1.36 | 2.00 | 5.94 | 2.86 | 3.41 |
| Second floor | 0.59 | 0.62 | 0.83 | 1.04 | 0.86 | 4.77 | 1.73 | 1.60 |
| Third floor | 0.53 | 0.48 | 1.02 | 0.85 | 1.14 | 4.16 | 1.79 | 1.63 |
| Fourth floor | 0.45 | 0.57 | 0.71 | 0.73 | 0.95 | 3.85 | 1.31 | 1.69 |
| Fifth floor | 0.40 | 0.43 | 0.83 | 0.65 | 0.72 | 3.19 | 1.40 | 1.41 |
| Sixth floor | 0.26 | 0.28 | 0.45 | 0.44 | 0.55 | 1.31 | 0.88 | 0.81 |
| Earthquake Magnitude | Max Acc. 0.126 g | Max Acc. 0.36 g | Max Acc. 0.72 g | |||||
|---|---|---|---|---|---|---|---|---|
| Earthquake ground motion | El Centro earthquake | Taft earthquake | Tianjin earthquake | El Centro earthquake | Taft earthquake | Tianjin earthquake | El Centro earthquake | Taft earthquake |
| Isolation layer | 1.32 (4.40) | 1.43 (3.02) | 2.8 (1.29) | 2.78 (4.31) | 5.00 (4.20) | 15.94 (17.5) | 7.60 (10.88) | 16.48 (11.1) |
| First floor | 0.91 | 1.23 | 1.5 | 1.95 | 3.58 | 4.62 | 3.72 | 5.52 |
| Second floor | 0.57 | 0.54 | 0.91 | 1.29 | 1.69 | 1.55 | 2.39 | 2.91 |
| Third floor | 0.43 | 0.62 | 0.90 | 1.07 | 1.98 | 2.27 | 2.16 | 3.18 |
| Fourth floor | 0.37 | 0.34 | 0.75 | 0.92 | 1.42 | 2.06 | 1.82 | 2.52 |
| Fifth floor | 0.34 | 0.32 | 0.61 | 0.85 | 1.50 | 2.63 | 1.70 | 2.82 |
| Sixth floor | 0.29 | 0.28 | 0.46 | 0.85 | 0.84 | 1.08 | 1.31 | 1.69 |
| El Centro Earthquake | Taft Earthquake | ||
|---|---|---|---|
| Earthquake Magnitude | Max Acc. 0.36 g | Max Acc. 0.72 g | Max Acc. 0.72 g |
| Acceleration response of the shaking table | −0.351 | 0.727 | −0.368 |
| Peak acceleration of 1st layer | −0.281 | −0.596 | −0.503 |
| Peak acceleration of 5th layer | −0.440 | −0.662 | −0.662 |
| The 5th layer acceleration amplification factor under LRB isolation | 1.254 | 0.91 | 1.79 |
| The 5th layer acceleration amplification factor under MR isolation | 0.89 | 0.64 | 0.69 |
| The LRB isolation layer peak displacement | 8.38 | 24.15 | 14.36 |
| The MR isolation layer peak displacement | 3.80 | 15.18 | 7.04 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, W.; Zhang, C.; Li, M.; Duan, C. Experimental Investigation on Semi-Active Control of Base Isolation System Using Magnetorheological Dampers for Concrete Frame Structure. Appl. Sci. 2019, 9, 3866. https://doi.org/10.3390/app9183866
Fu W, Zhang C, Li M, Duan C. Experimental Investigation on Semi-Active Control of Base Isolation System Using Magnetorheological Dampers for Concrete Frame Structure. Applied Sciences. 2019; 9(18):3866. https://doi.org/10.3390/app9183866
Chicago/Turabian StyleFu, Weiqing, Chunwei Zhang, Mao Li, and Cunkun Duan. 2019. "Experimental Investigation on Semi-Active Control of Base Isolation System Using Magnetorheological Dampers for Concrete Frame Structure" Applied Sciences 9, no. 18: 3866. https://doi.org/10.3390/app9183866
APA StyleFu, W., Zhang, C., Li, M., & Duan, C. (2019). Experimental Investigation on Semi-Active Control of Base Isolation System Using Magnetorheological Dampers for Concrete Frame Structure. Applied Sciences, 9(18), 3866. https://doi.org/10.3390/app9183866