Time Shared Optical Network (TSON): A Programmable Network Edge Solution for Multi-Access Support

Abstract
:1. Introduction
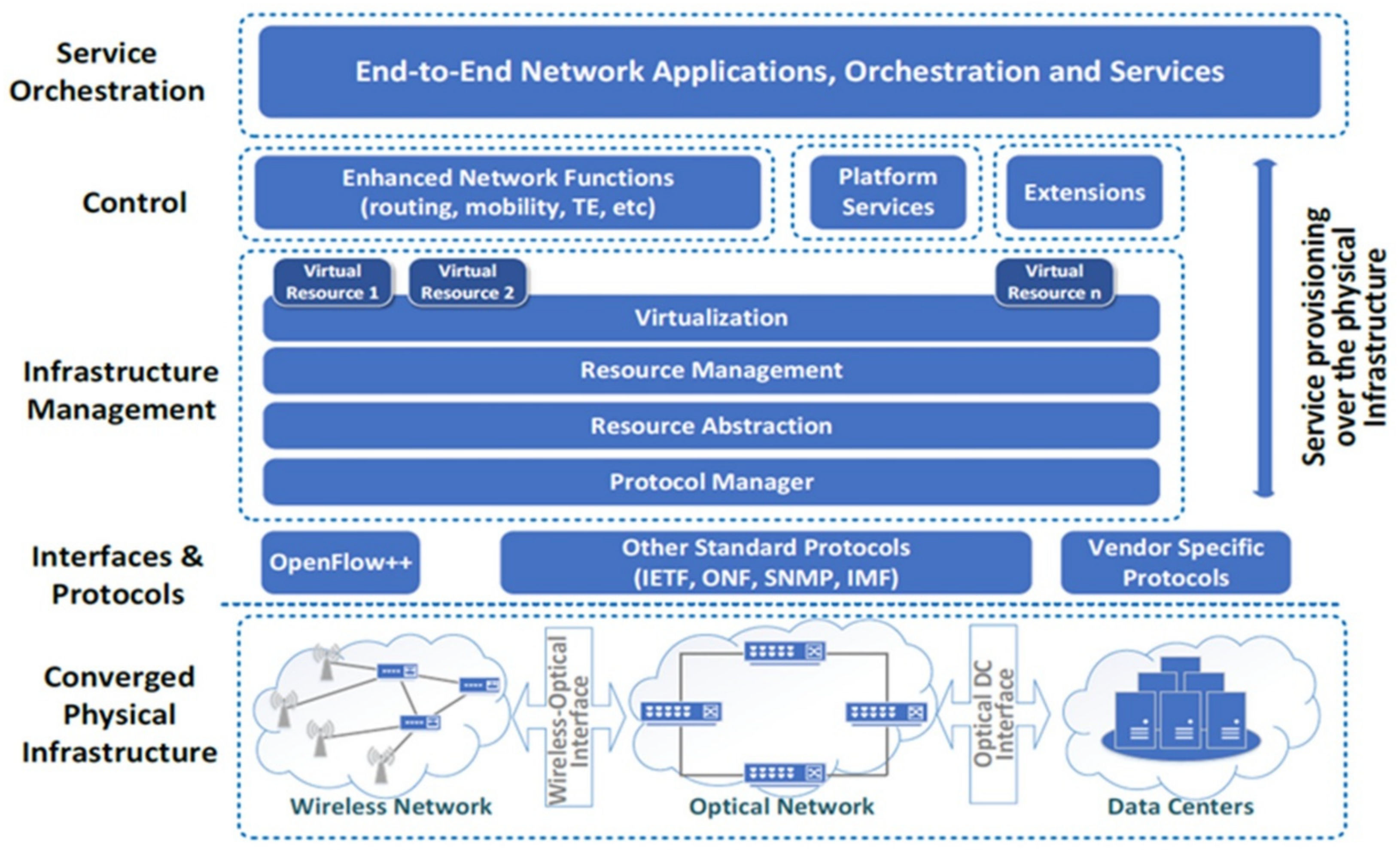
- Develop a radically new architecture that will take a technology agnostic approach targeting cross-technology application, programmable infrastructure, and service composition driven by KPIs in, for example, capacity, connectivity, spectrum utilisation, energy efficiency, fairness, QoS, and QoE.
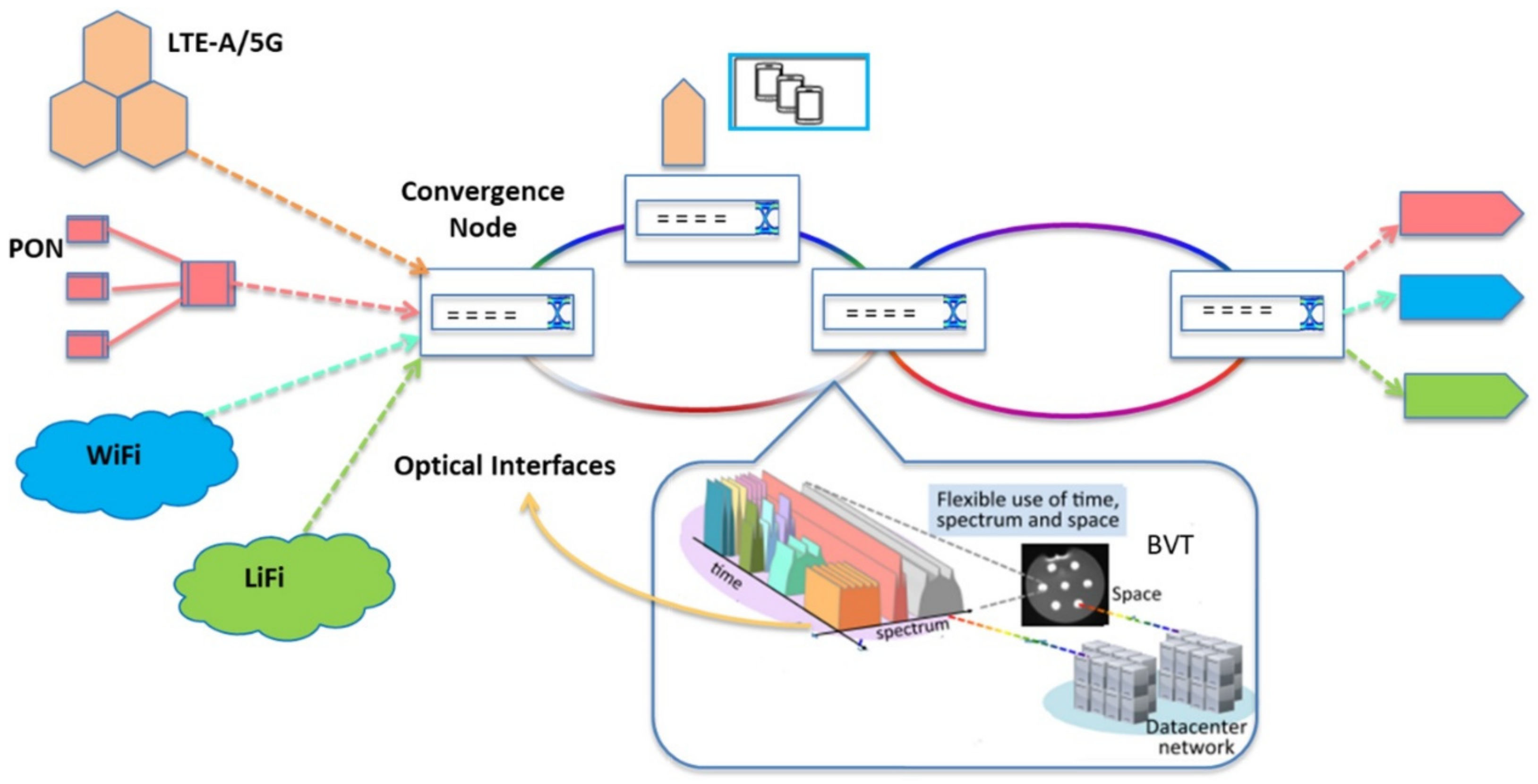
- Converge heterogeneous technology domains seamlessly, specifically, wireless access and optical access, high capacity optical metro/backbone networks, data centre (DC) networks, and end devices.
- Support very high bandwidth granularity range and capacity, from Pbps (e.g., inter-data centre transport) to kbps (e.g., machine-to-machine communications).
- Break traditional barriers between infrastructure, control, and service layers by making the network infrastructure and its control part of the end-to-end service delivery chain.
2. TSON, the Past
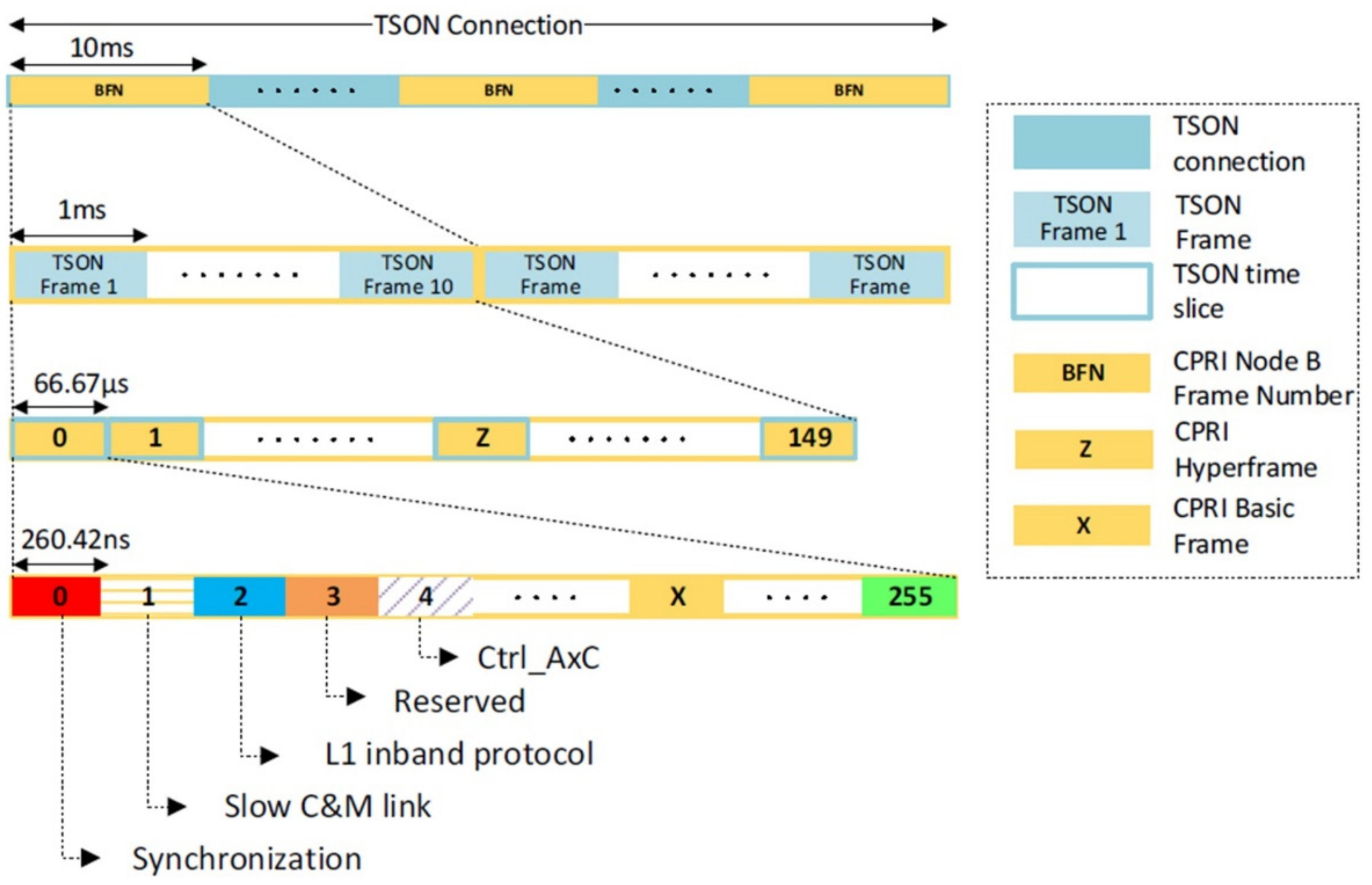
2.1. Evolution Stage 1: TSON Baseline
- Connections—referring to a sub-wavelength light path establishment between any two end points in the TSON domain.
- Frames—wherein each connection lasts for a number of frames to improve statistical multiplexing of data units.
- Time-slices—wherein each frame is divided into time-slices as the smallest units of network resource.
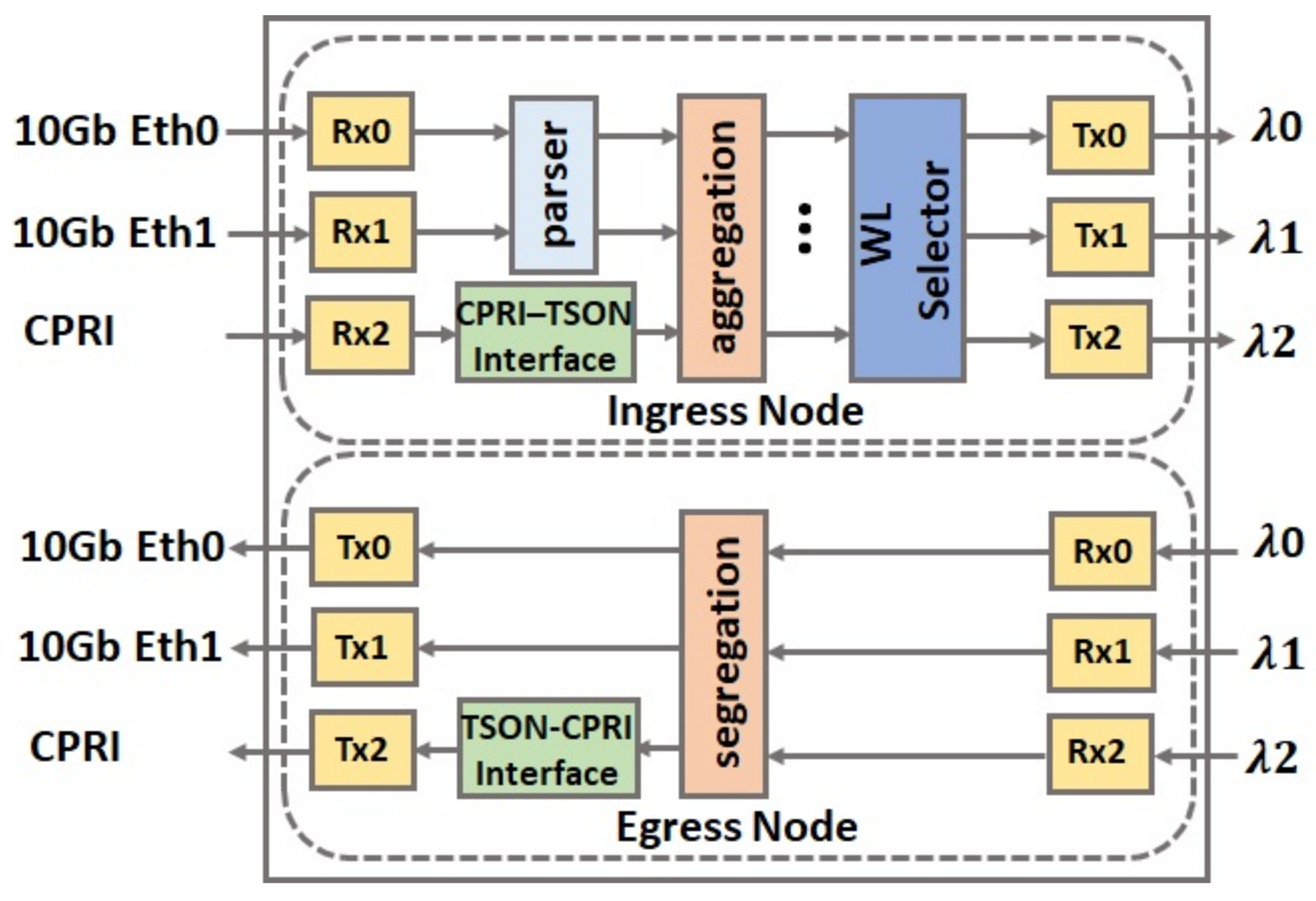
2.2. Evolution Stage 2: TSON Multi-Protocol
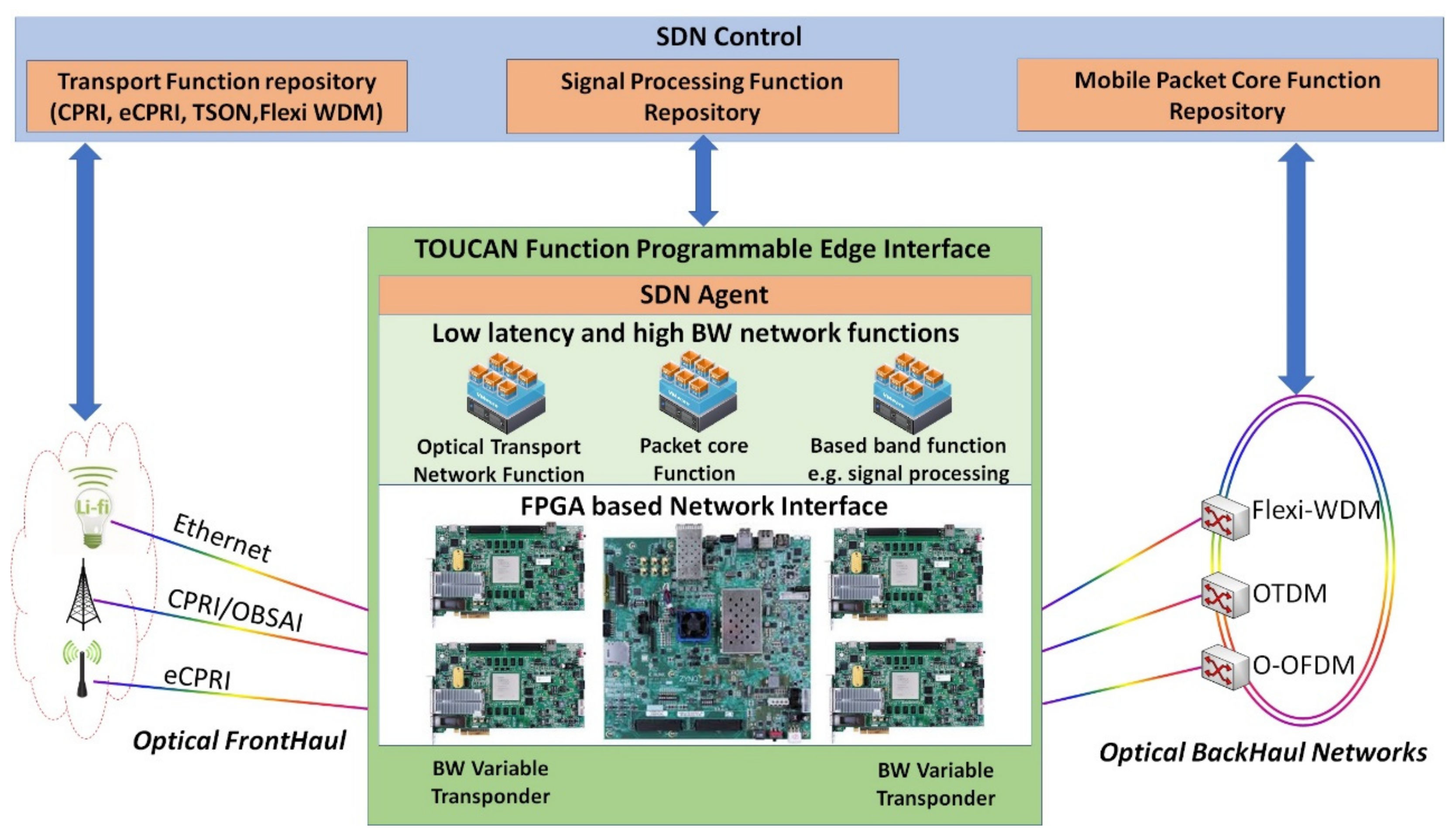
- Supporting xHaul—the TSON Ethernet client ports are extended to multi-ports supporting BH services and native CPRI is added to support FH for the xHaul solution.
- Wavelength multiplexing—the clients can use a common wavelength (i.e., lambda) if the total bandwidth of the client is less than 10 Gb. In this scenario, the frames are delivered to the related clients at the egress nodes on the basis of their header information.
- Synchronisation—IEEE-1588 v2 [9] protocol is integrated for accurate synchronisation.
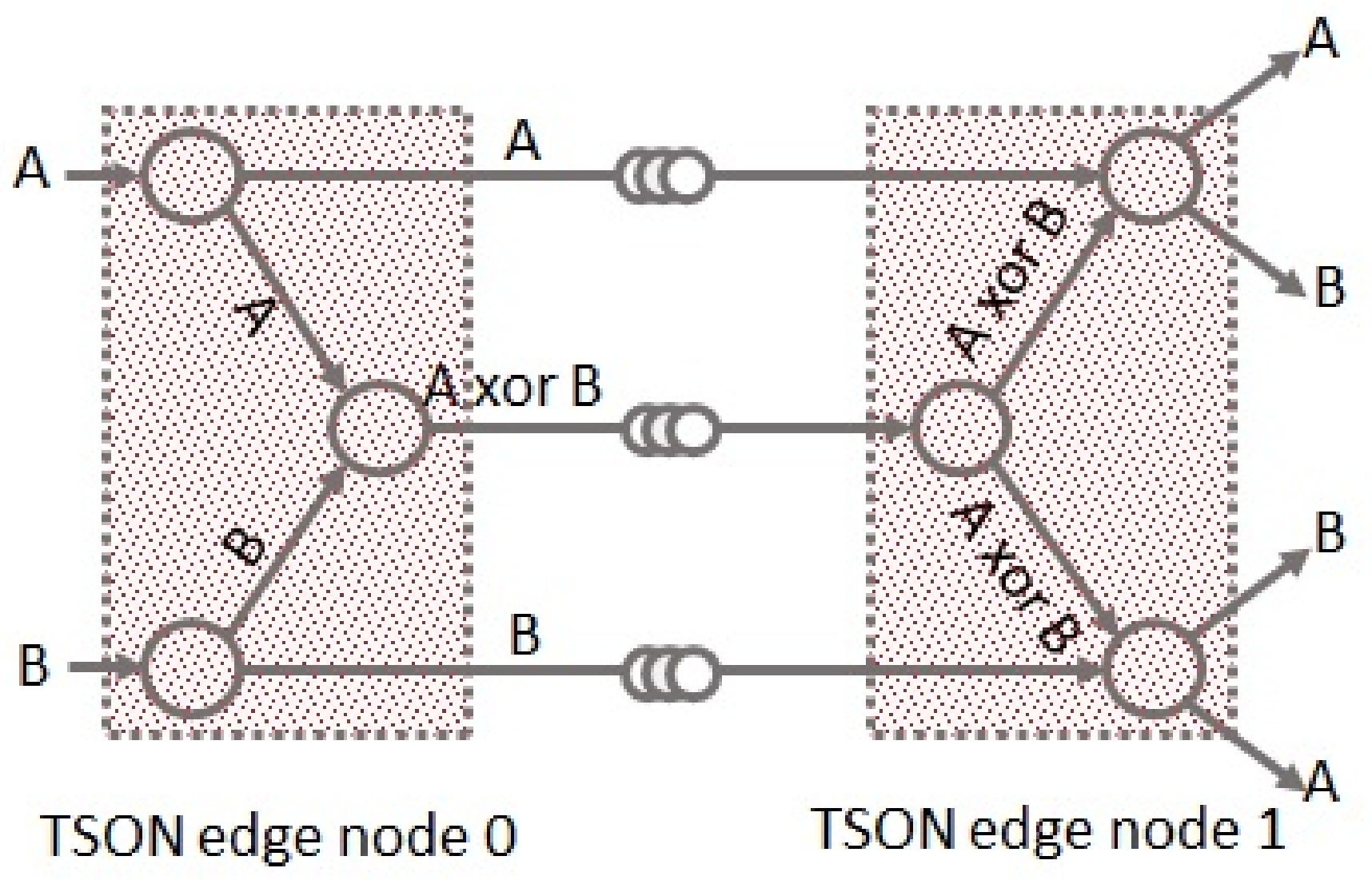
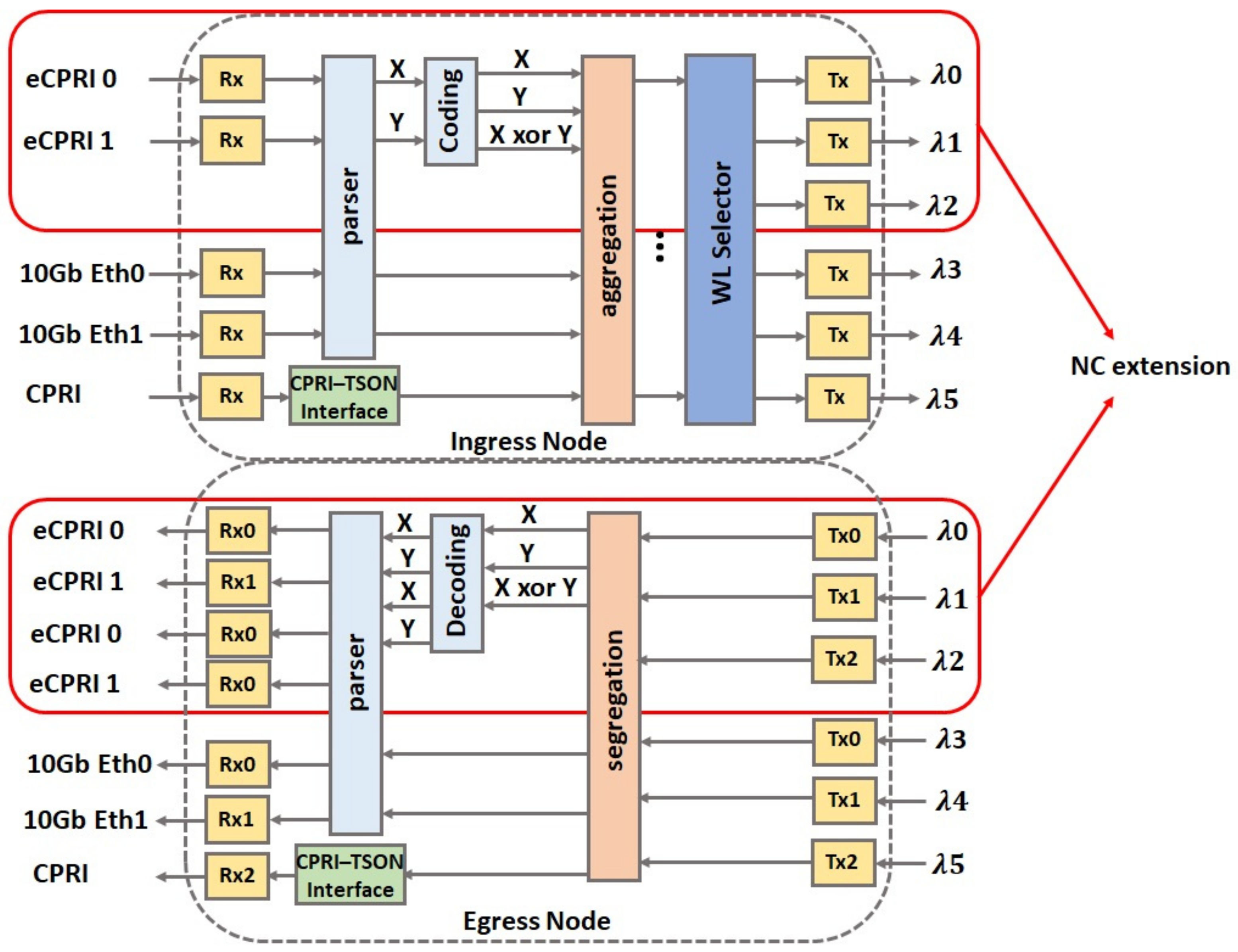
2.3. Evolution Stage 3: TSON NC for Resilient C-RANs
- Coding—providing module-2 sum and replication operation at FH line rate, as these factors may degrade the performance of C-RANs in practical systems.
- Storage—the operation of the decoding process at the edge imposes significant buffering requirements due to the high data rate of FH streams.
- Synchronisation—synchronisation between flows reaching decode nodes.
2.4. Evolution Stage 4: TSON Multi Haul
3. TSON, Present
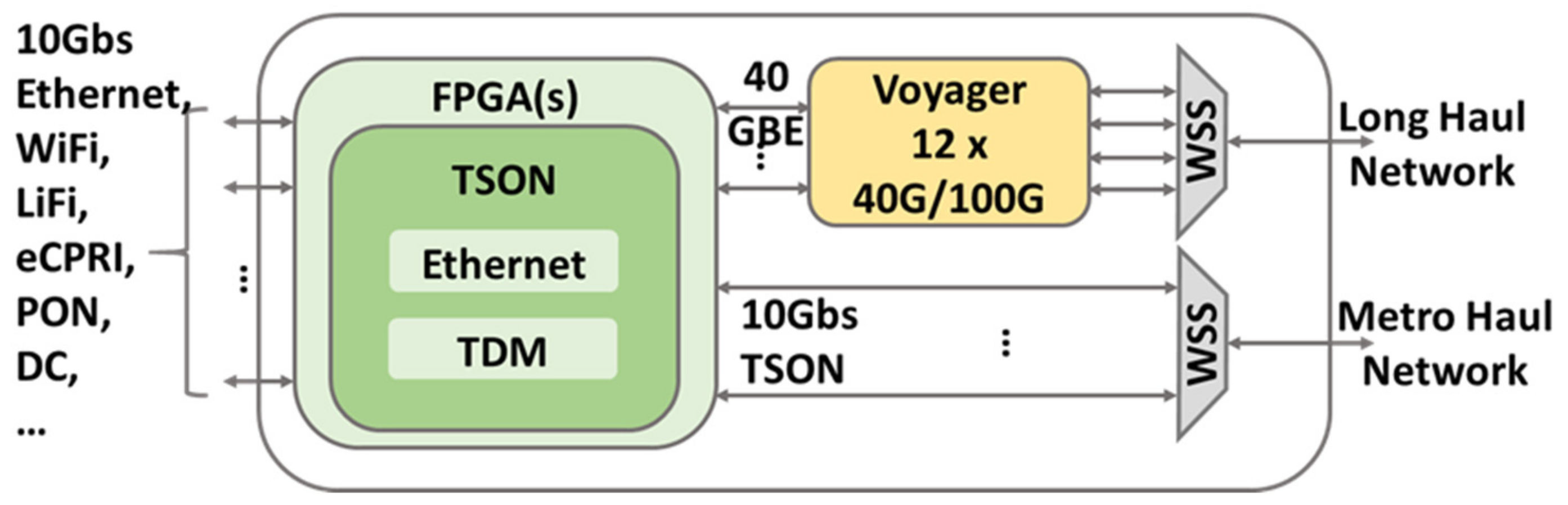
3.1. Evolution Stage 5: Current TSON Architecture
- Modularity—a set of intellectual property (IP) cores have been created to ease and shape the TSON system integration.
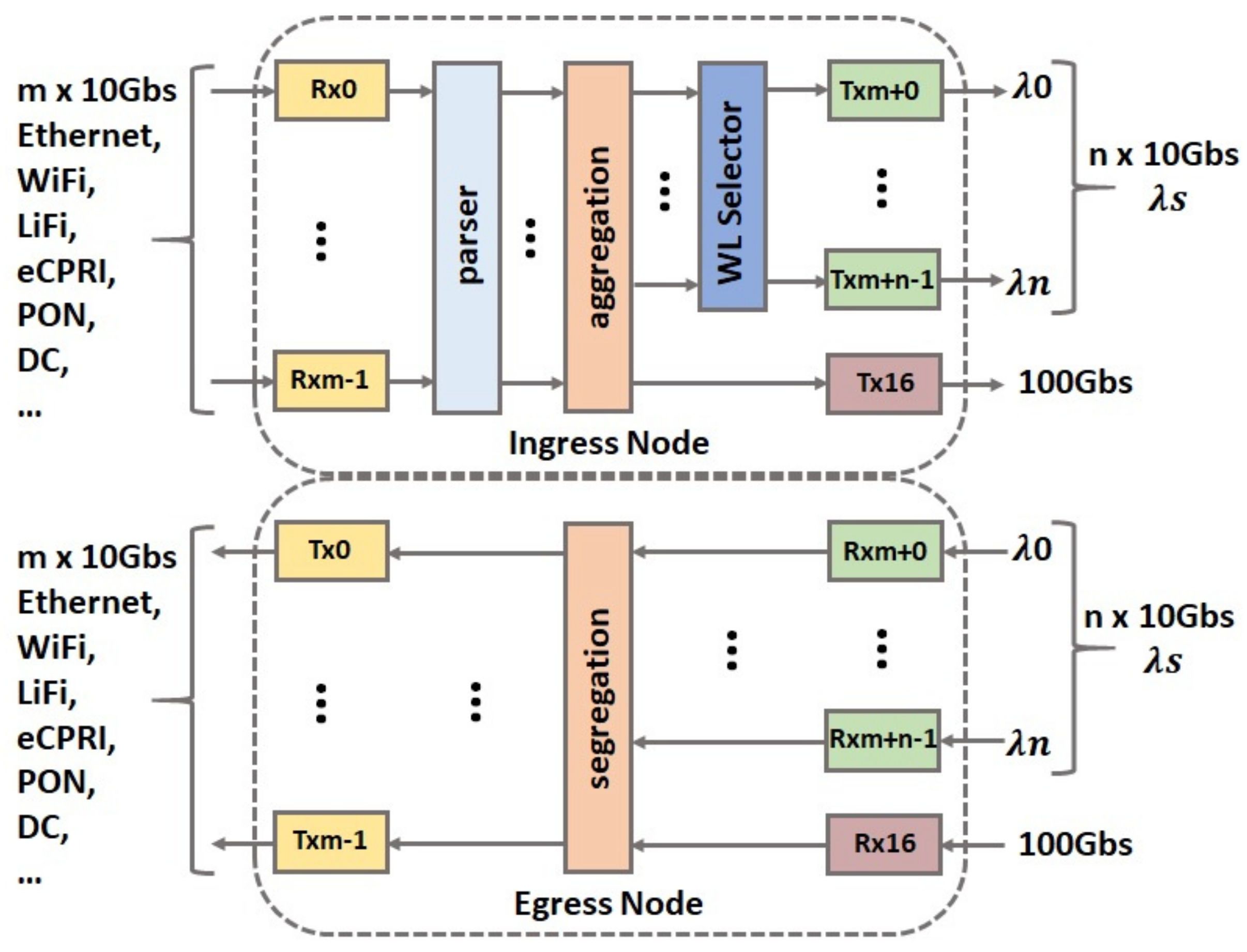
- Extendibility—the TSON pipelines are designed to be extendable. The only limitation factor is the FPGA chip density and IOs for implementation.
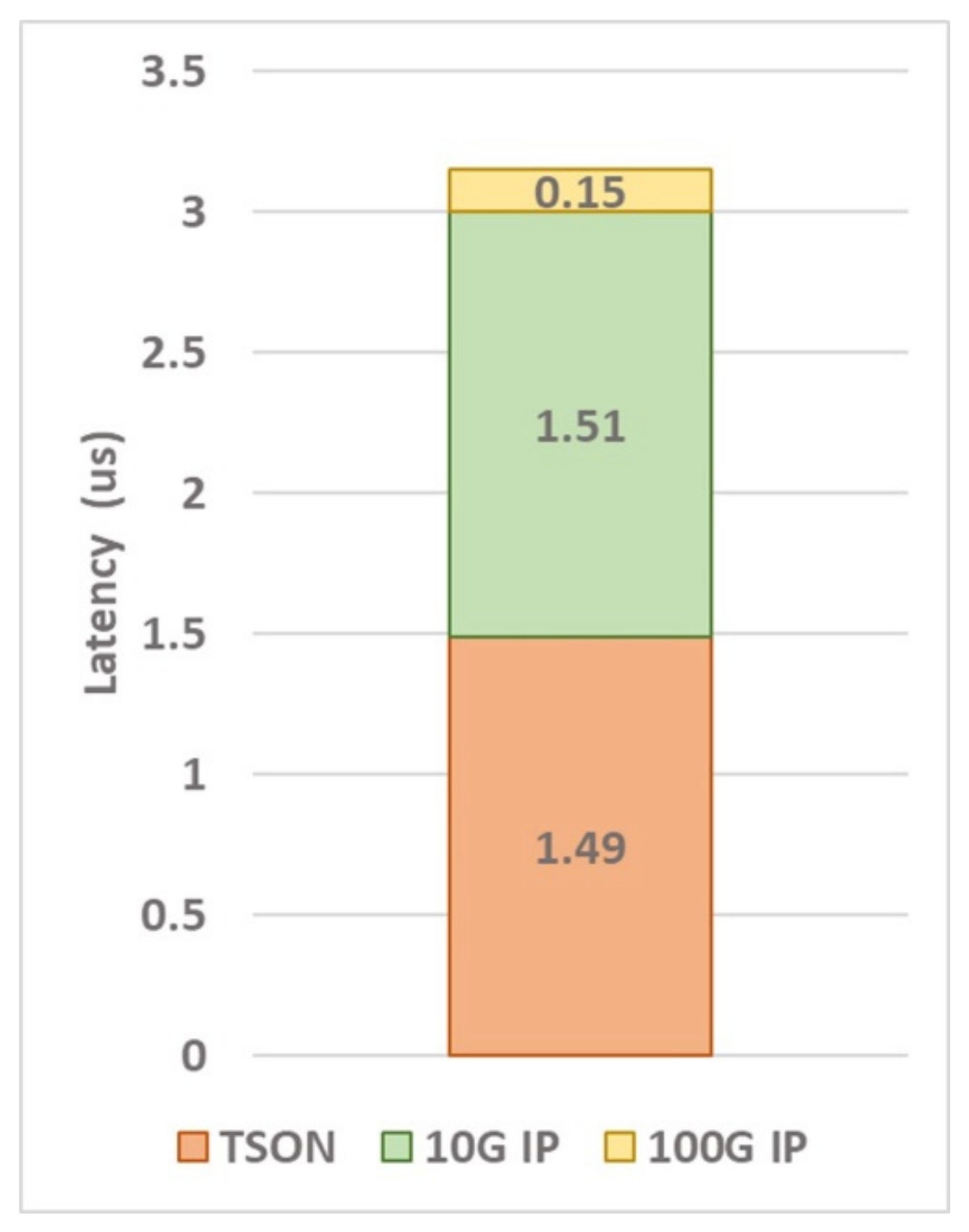
- Optimisation—the TSON pipelines are optimised to reach lower latency for 10 Gb pipelines and reduce the latency by 6.7%.
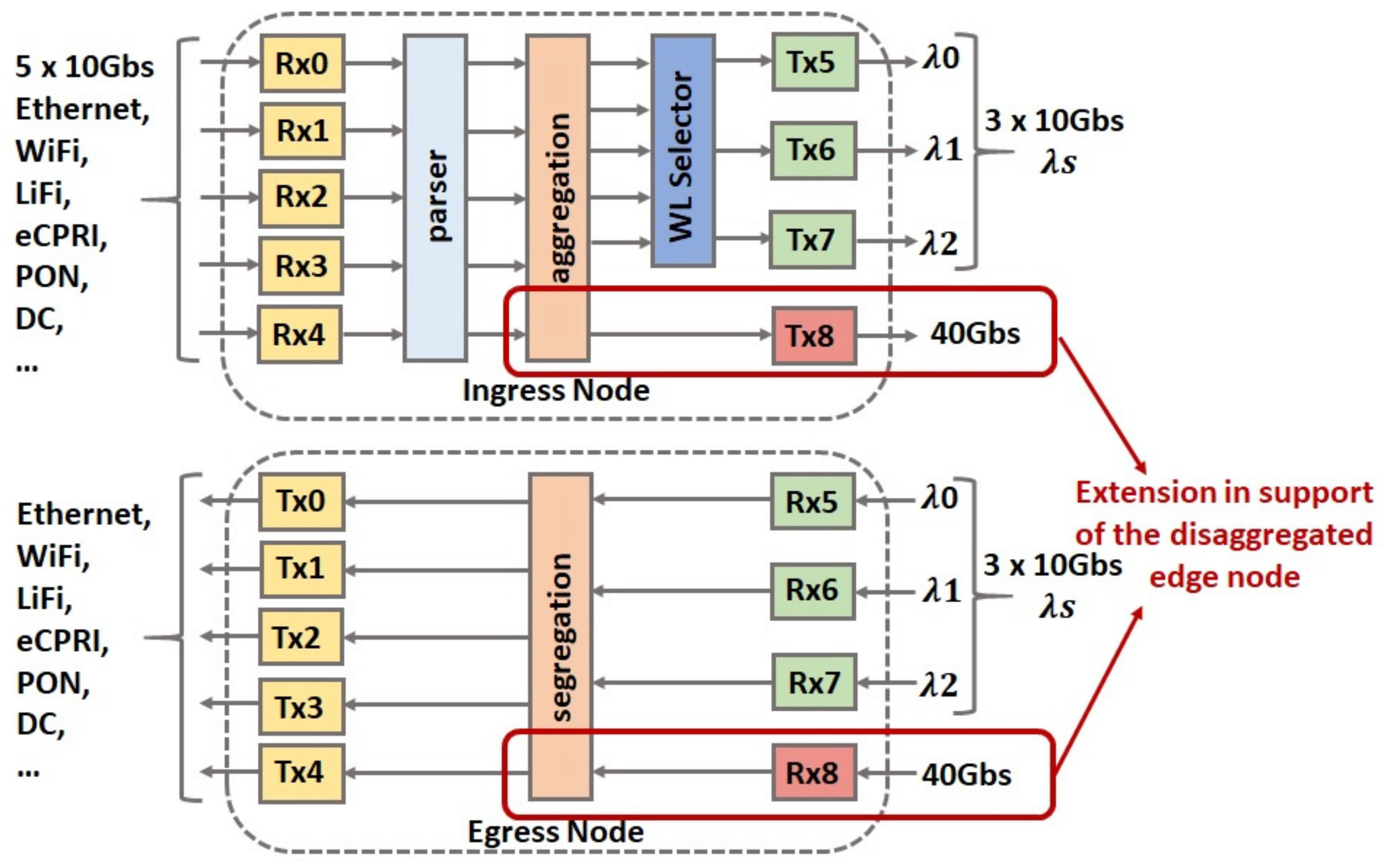
- 100 Gb aggregation—× 10 Gb to 100 Gb aggregation is added to the design.
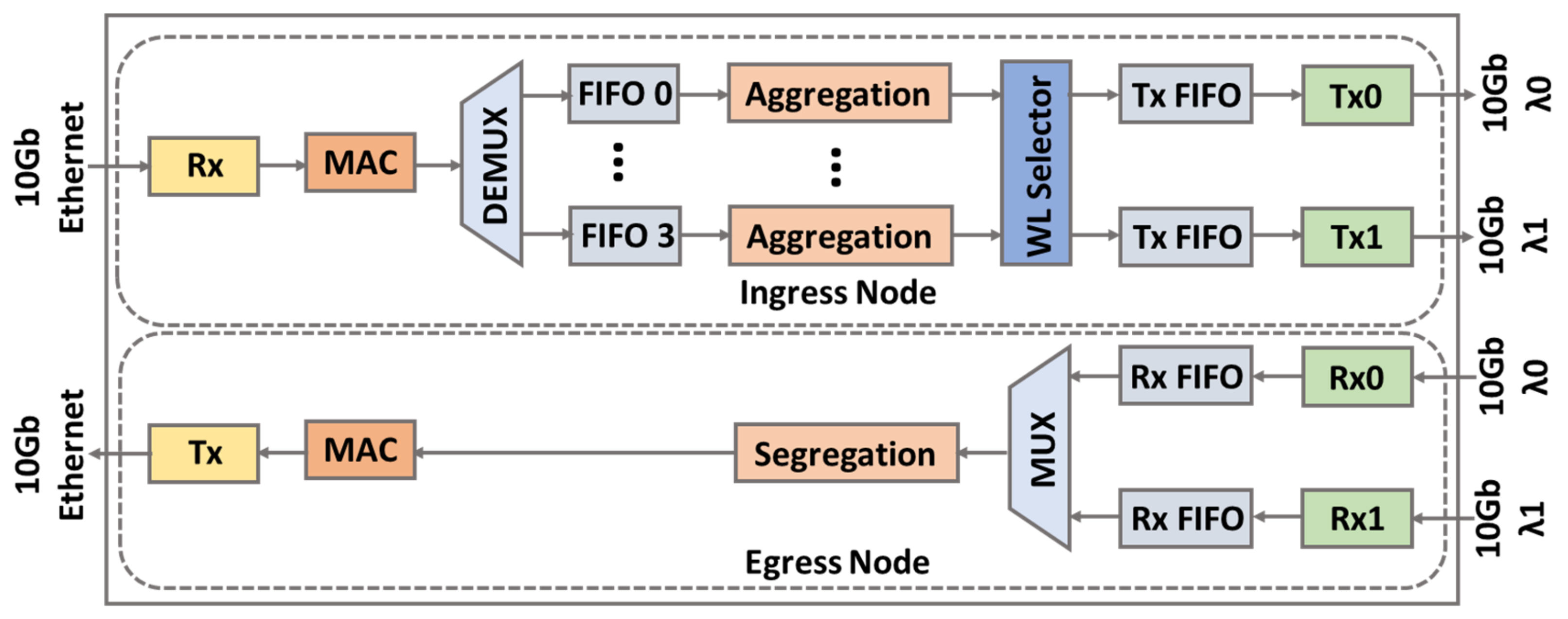
- Frame format—the TSON frame format is changed. In this scenario, each TSON frame slice carries the incoming client frame format. This means if the client data is Ethernet packets, the TSON frame slices are shaped by Ethernet frames. This feature makes the TSON frames transparent for other packet processing devices, but the time-slices frames are visible for them for processing.
- Symmetry—each 10 Gb line can be used as client or lambda, depending on the demands without changing anything in the hardware if m + n − 1 = number of 10 G IOs, where m is the number of clients and n is the number of lambdas. This feature is another result of the changing TSON frame format.
- Elastic bandwidth allocation mode—this mode is enabled for both 10 Gb and 100 Gb wavelengths.
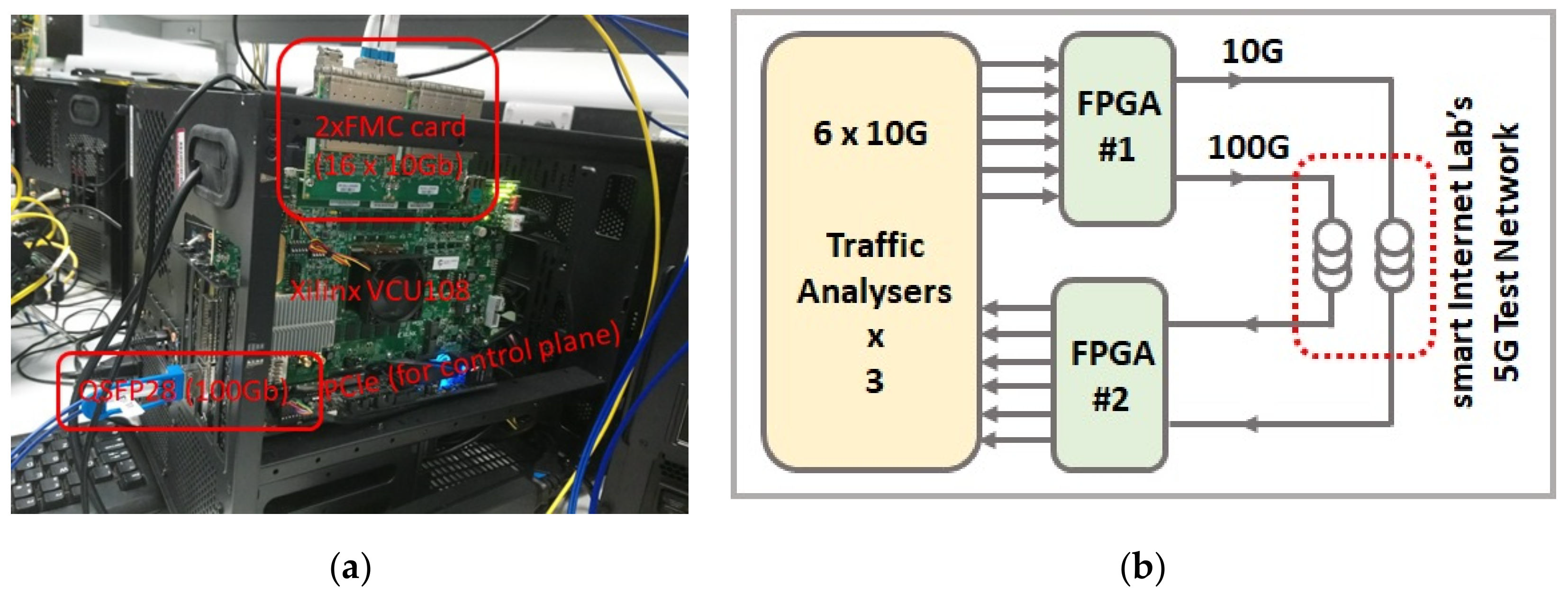
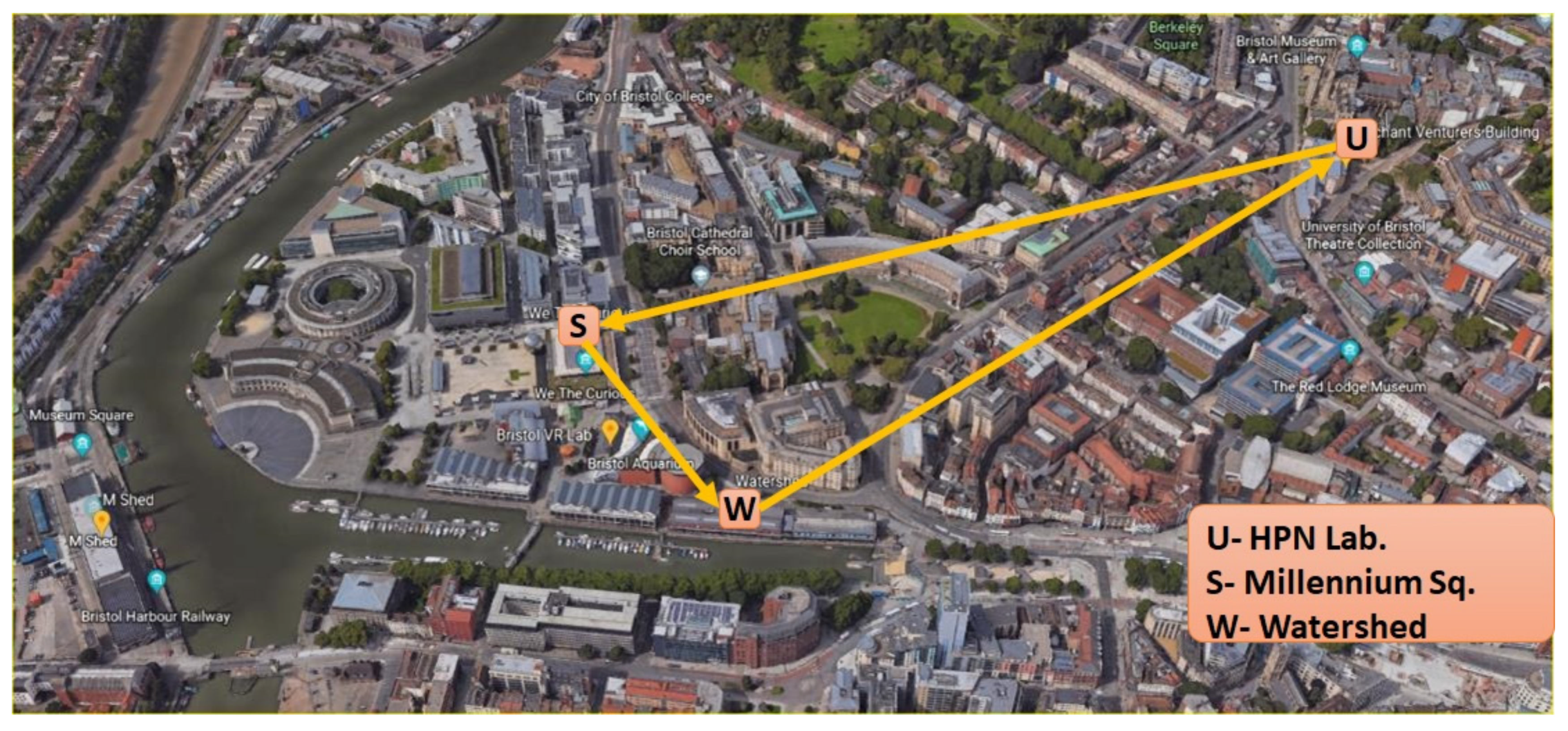
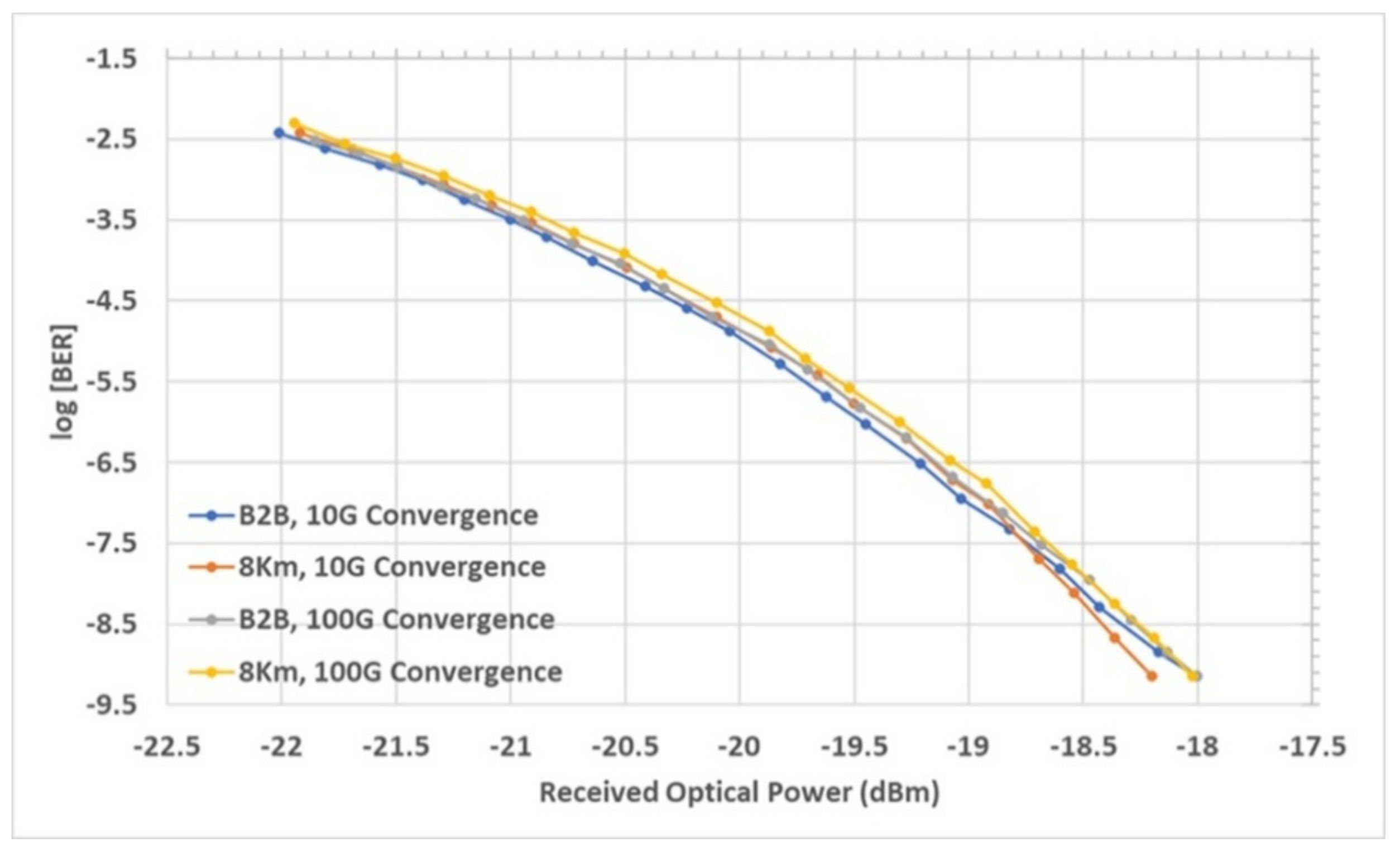
3.2. The TSON Testbed Setup and Experimental Results
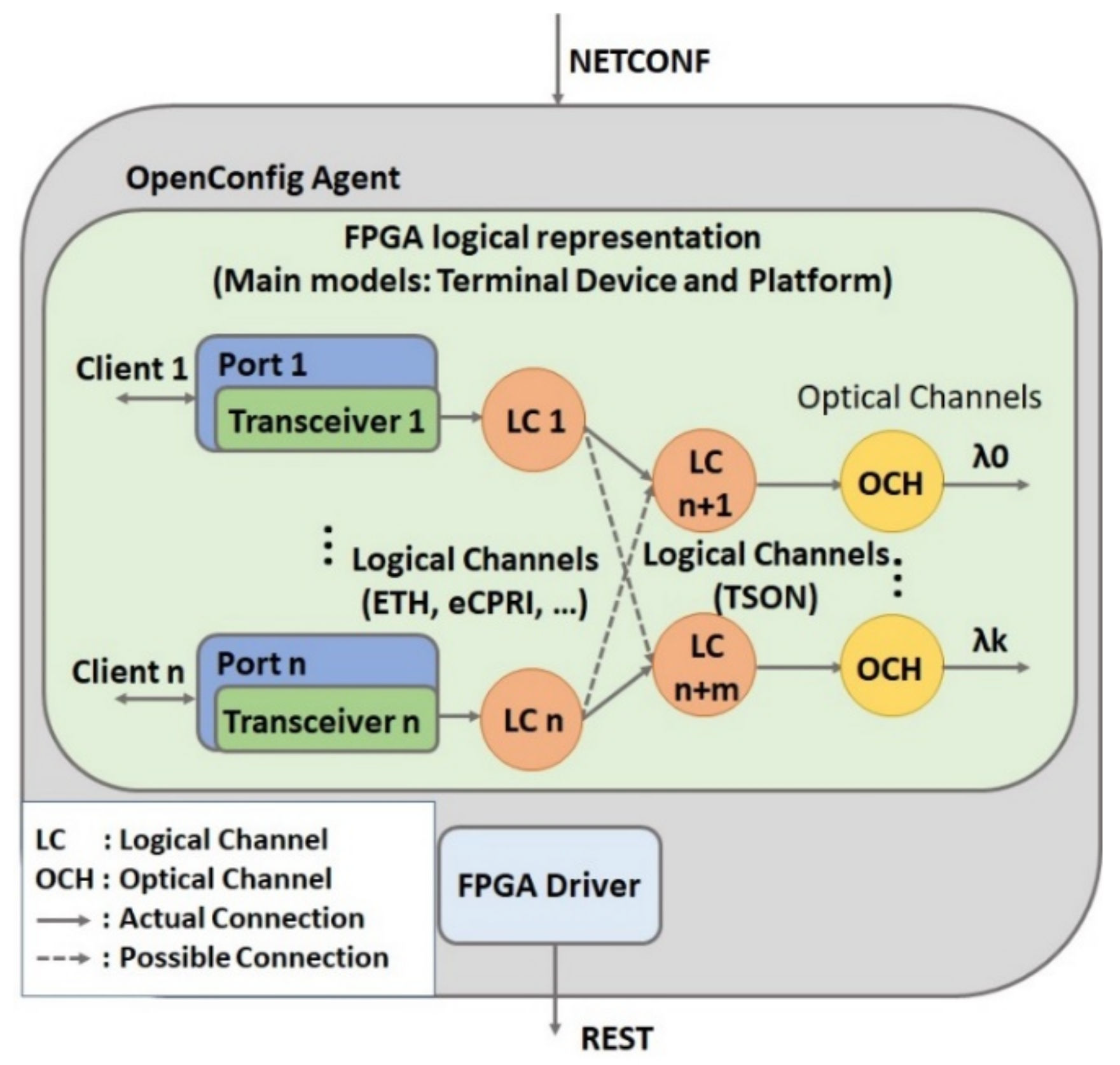
4. TSON Control Plane
- Virtual local area network (VLAN) pairs;
- Time slots size;
- Frames size;
- Mode of transmission (TSON or Ethernet) to select the granularity.
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- TOUCAN Project Website. Available online: https://www.toucan-network.ac.uk/ (accessed on 30 August 2019).
- Zervas, G.S.; Triay, J.; Amaya, N.; Qin, Y.; Cervelló-Pastor, C.; Simeonidou, D. Time Shared Optical Net-work (TSON): A novel metro architecture for flexible multi-granular services. Opt. Express 2011, 19, B509–B514. [Google Scholar] [CrossRef] [PubMed]
- Yan, Y.; Qin, Y.; Zervas, G.; Rofoee, B.; Simeonidou, D. High performance and flexible FPGA-based time shared optical network (TSON) metro node. Opt. Express 2013, 21, 5499–5504. [Google Scholar] [CrossRef] [PubMed]
- Farhadi-Beldachi, A.; Huques-Satas, E.; Tzanakaki, A.; Yan, Y.; Nejabati, R.; Simeonidou, D. Experimental Demonstration of 5G Fronthaul and Backhaul Convergence based on FPGA based Active Optical Transport. In Proceedings of the 2018 European Conference on Optical Communication (ECOC), Rome, Italy, 23–27 September 2018. [Google Scholar]
- Kozdrowski, S.; Zotkiewicz, M.; Sujecki, S. Optimization of Optical Networks Based on CDC-ROADM Technology. Appl. Sci. 2019, 9, 399. [Google Scholar] [CrossRef]
- Jackson, C.; Kondepu, K.; Ou, Y.; Farhadi Beldachi, A.; Pagès Cruz, A.; Agraz, F.; Moscatelli, F.; Miao, W.; Kamchevska, V.; Calabretta, N.; et al. COSIGN: A complete SDN enabled all-optical architecture for data centre virtualisation with time and space multiplexing. In Proceedings of the European Conference and Exhibition on Optical Communication, Gothenburg, Sweden, 27–21 September 2017. [Google Scholar]
- Kondepu, K.; Zou, J.; Farhadi Beldachi, A.; Chen, H.K.; Chase, C.; Huang, M.; Hugues Salas, E.; Garcia-Espin, J.A.; Tzanakaki, A.; Nejabati, R.; et al. Performance Evaluation of Next-Generation Elastic Backhaul with Flexible VCSEL-based WDM Fronthaul. In Proceedings of the European Conference and Exhibition on Optical Communication, Gothenburg, Sweden, 27–21 September 2017. [Google Scholar] [CrossRef]
- Kondepu, K.; Jackson, C.; Ou, Y.; Beldachi, A.; Pagès, A.; Agraz, F.; Moscatelli, F.; Miao, W.; Kamchevska, V.; Calabretta, N.; et al. Fully SDN-enabled all-optical architecture for data center virtualization with time and space multiplexing. IEEE J. Opt. Commun. Netw. 2018, 10, B90–B101. [Google Scholar] [CrossRef]
- IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems; IEEE Std 1588–2008 (Revision of IEEE Std 1588–2002); IEEE: Piscataway, NJ, USA, 2008; Volume 1, pp. 1–269.
- Available online: https://www.xilinx.com/products/intellectual-property/axi_10g_ethernet.html (accessed on 6 November 2019).
- Available online: https://www.xilinx.com/support/documentation/ip_documentation/axi_10g_ethernet/v3_1/pg157-axi-10g-ethernet.pdf (accessed on 6 November 2019).
- Camps Mur, D.; Gutierrez, J.; Tzanakaki, A.; Flegkas, P.; Choumas, K.; Giatsios, D.; Farhadi Beldachi, A.; Diallo, T.; Zou, J.; Legg, P.; et al. 5G-XHaul: A Novel Wireless-Optical SDN Transport Network to Support Joint 5G Backhaul and Fronthaul Services. IEEE Commun. Mag. 2019, 57, 99–105. [Google Scholar] [CrossRef]
- Farhadi Beldachi, A.; Anastasopoulos, M.; Manolopoulos, A.; Tzanakaki, A.; Nejabati, R.; Simeonidou, D. Resilient Cloud-RANs Adopting Network Coding. In Proceedings of the 23rd International Conference on Optical Network Design and Modeling (ONDM 2019), Athens, Greece, 13 May 2019. [Google Scholar]
- Farhadi Beldachi, A.; Diallo, T.; Rajkumar, K.; Hugues Salas, E.; Wang, R.; Tzanakaki, A.; Nejabati, R.; Simeonidou, D. A Novel programmable disaggregated edgenode supporting heterogeneous 5g access technologies. In Proceedings of the 45th European Conference on Optical Communication, Dublin, Ireland, 22–26 September 2019. [Google Scholar]
- Facebook Voyager Optical Interfaces. Available online: https://docs.cumulusnetworks.com/display/DOCS/Facebook+Voyager+Optical+Interfaces (accessed on 14 April 2019).
- WaveShaper 1600A. Available online: https://www.finisar.com (accessed on 14 April 2019).
- Diallo, T.; Beldachi, A.F.; Muqaddas, A.S.; Silva, R.; Nejabati, R.; Tzanakaki, A.; Simeonidou, D. Enabling Heterogenous Low Latency and High-bandwidth Virtual Network Services for 5G Utilizing a Flexible Optical Transport Network. In Proceedings of the 2019 Optical Fiber Communications Conference and Exhibition, San Diego, CA, USA, 3–7 March 2019. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Destination | Latency (µs) |
|---|---|
| Back to back, 10 G convergence | 8.86 |
| Back to back, 100 G convergence | 6.32 |
| 8 km, 10 G convergence | 47.6 |
| 8 km, 100 G convergence | 45.1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farhadi Beldachi, A.; Tzanakaki, A.; Nejabati, R.; Simeonidou, D. Time Shared Optical Network (TSON): A Programmable Network Edge Solution for Multi-Access Support. Appl. Sci. 2019, 9, 4786. https://doi.org/10.3390/app9224786
Farhadi Beldachi A, Tzanakaki A, Nejabati R, Simeonidou D. Time Shared Optical Network (TSON): A Programmable Network Edge Solution for Multi-Access Support. Applied Sciences. 2019; 9(22):4786. https://doi.org/10.3390/app9224786
Chicago/Turabian StyleFarhadi Beldachi, Arash, Anna Tzanakaki, Reza Nejabati, and Dimitra Simeonidou. 2019. "Time Shared Optical Network (TSON): A Programmable Network Edge Solution for Multi-Access Support" Applied Sciences 9, no. 22: 4786. https://doi.org/10.3390/app9224786
APA StyleFarhadi Beldachi, A., Tzanakaki, A., Nejabati, R., & Simeonidou, D. (2019). Time Shared Optical Network (TSON): A Programmable Network Edge Solution for Multi-Access Support. Applied Sciences, 9(22), 4786. https://doi.org/10.3390/app9224786