Improving Localization of Deep Inclusions in Time-Resolved Diffuse Optical Tomography

Abstract
:1. Introduction
2. Methods
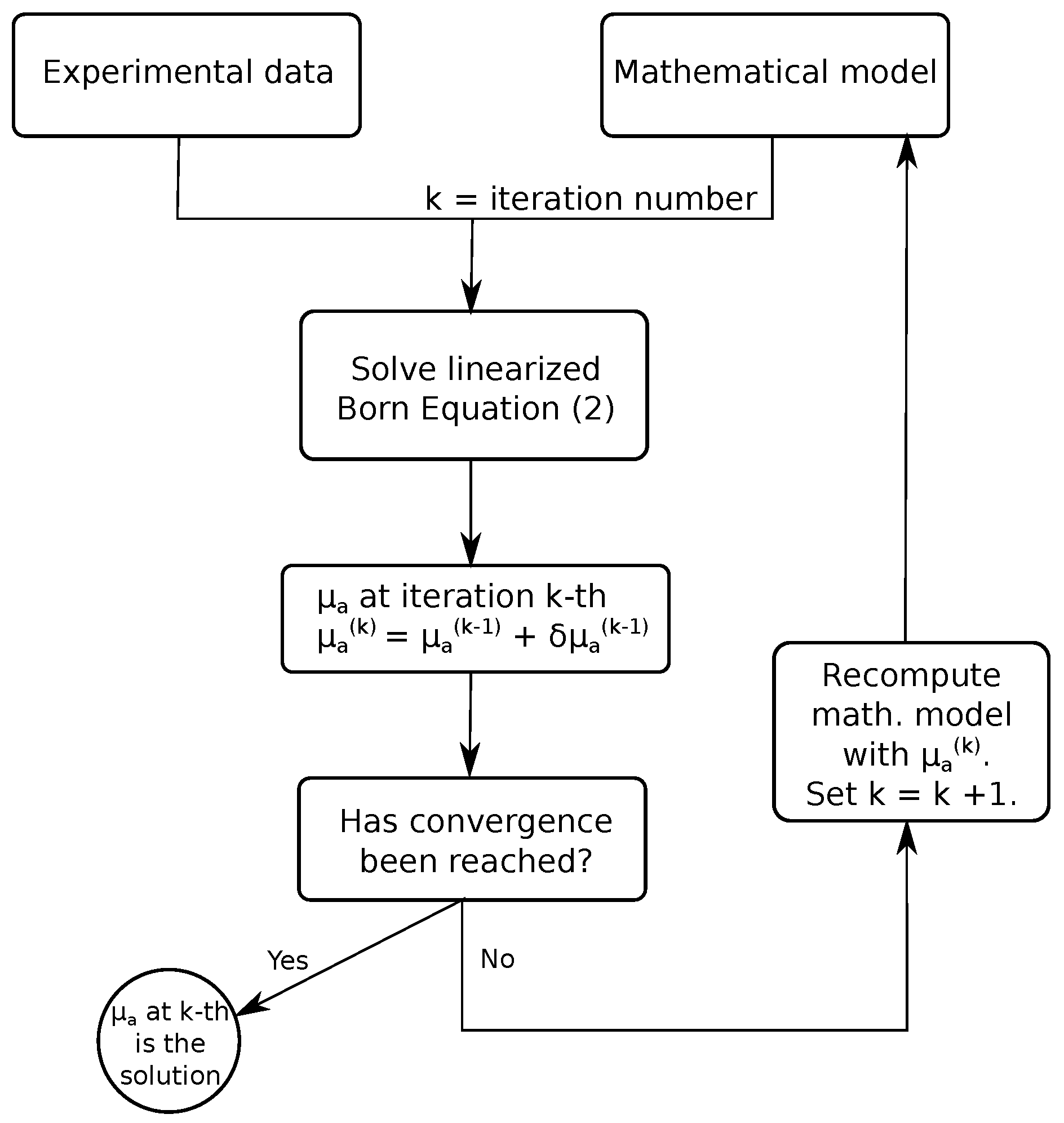
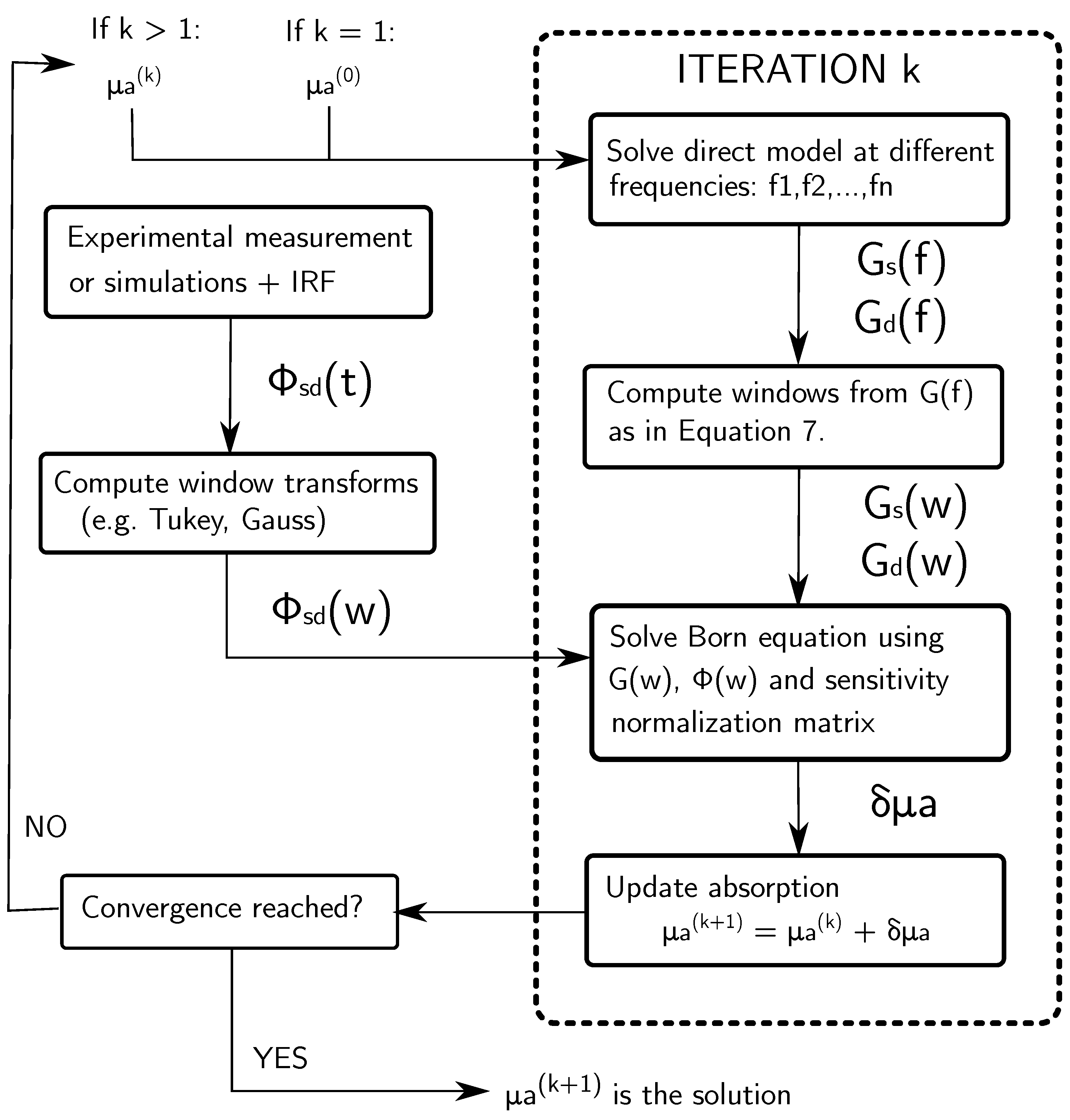
2.1. Time- and Datatypes-Based Reconstruction
2.2. A Novel Method to Compute Temporal Windows
Computational Aspects
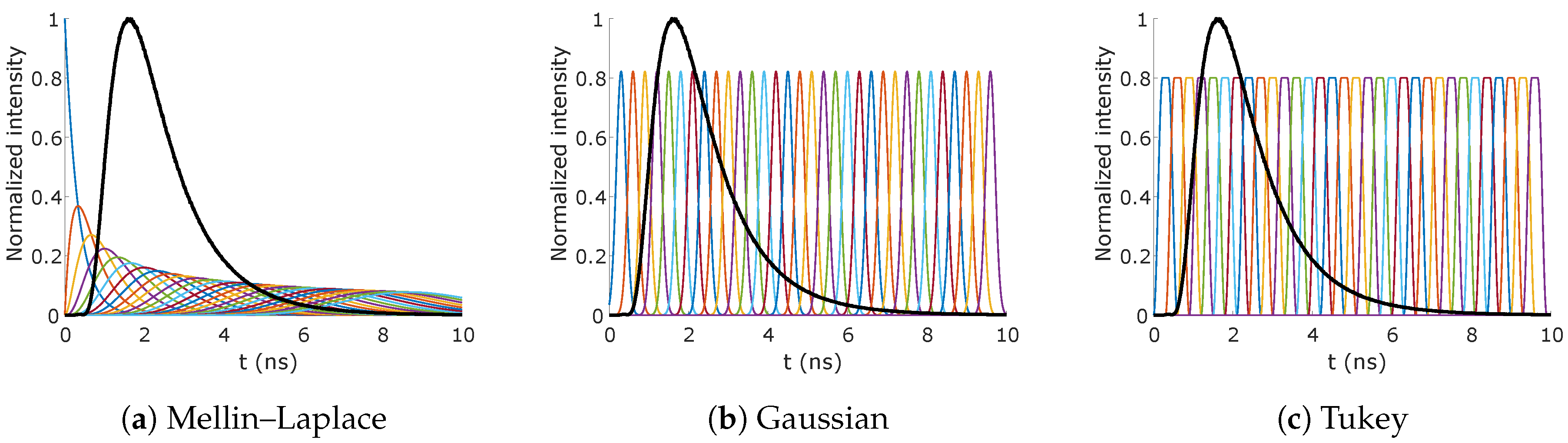
2.3. Temporal Windows
2.3.1. Standard Moments
2.3.2. Mellin-Laplace Moments
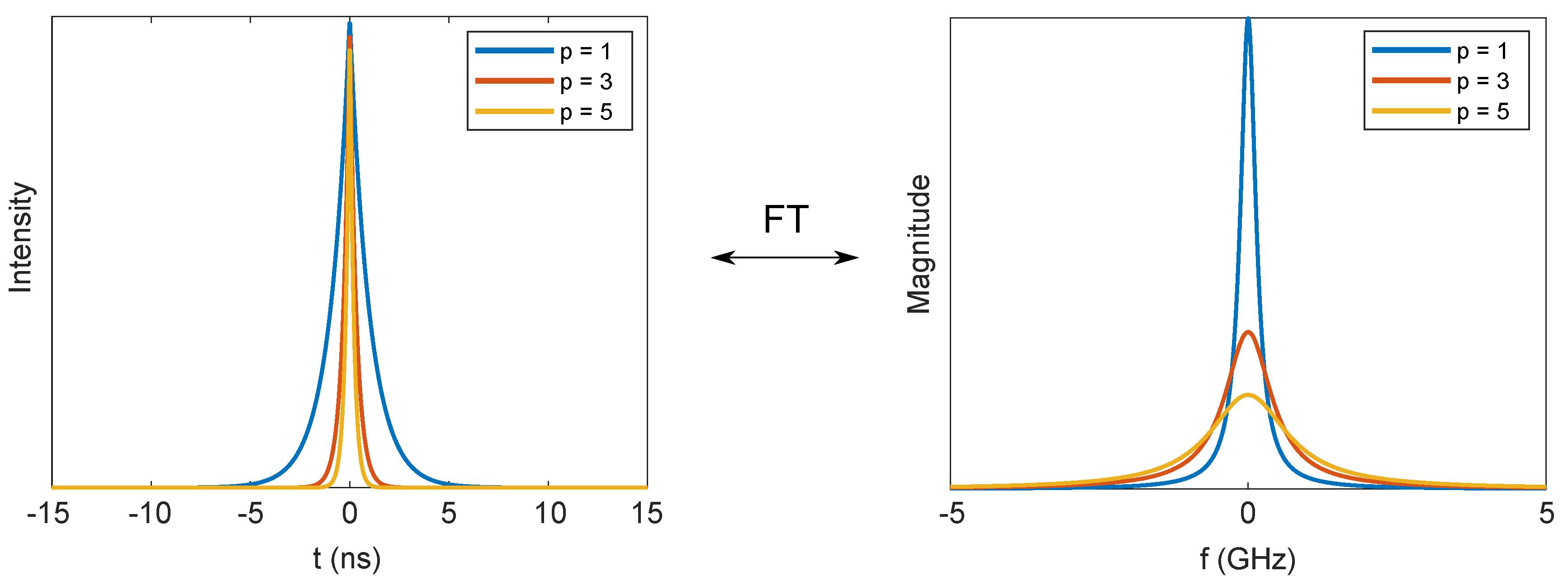
2.3.3. Generalized Gaussian Window
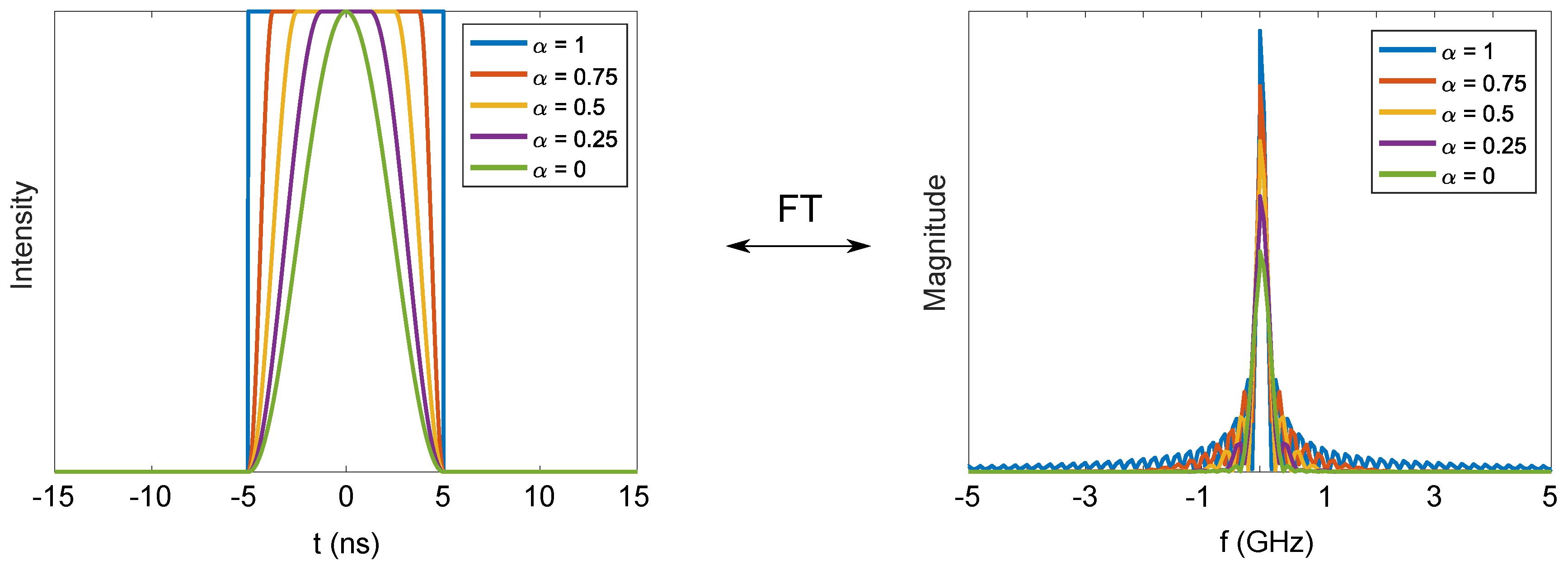
2.3.4. Tukey Window
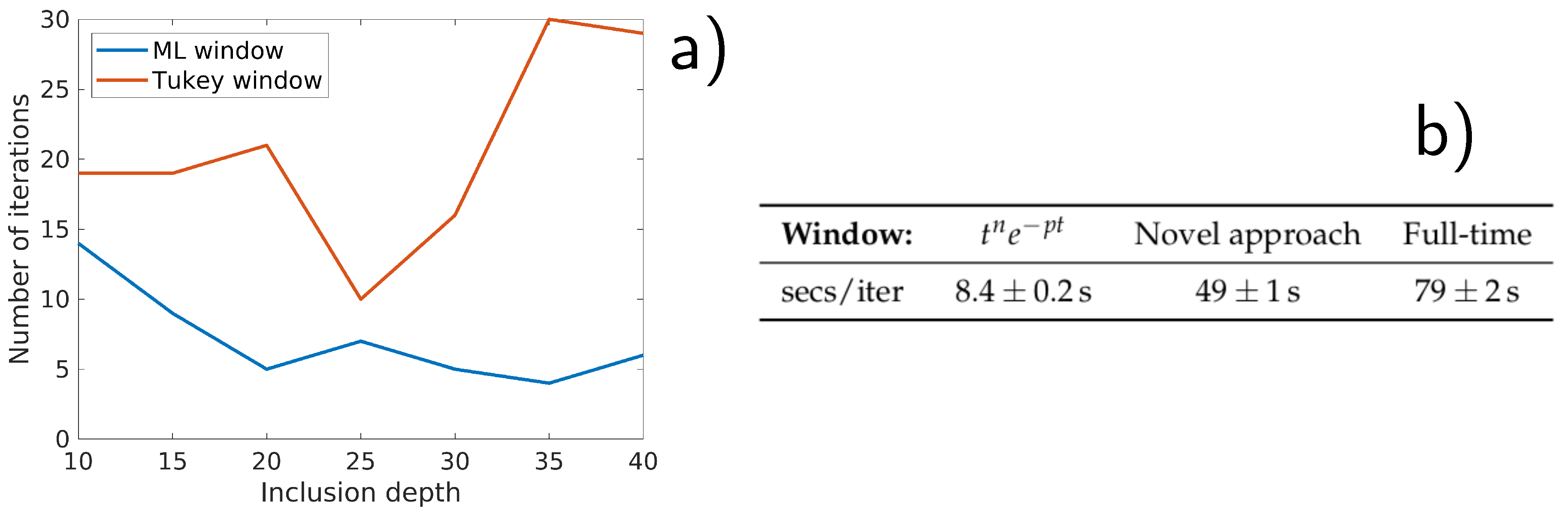
2.3.5. Trade-Off between Temporal Selectivity and Computation Complexity
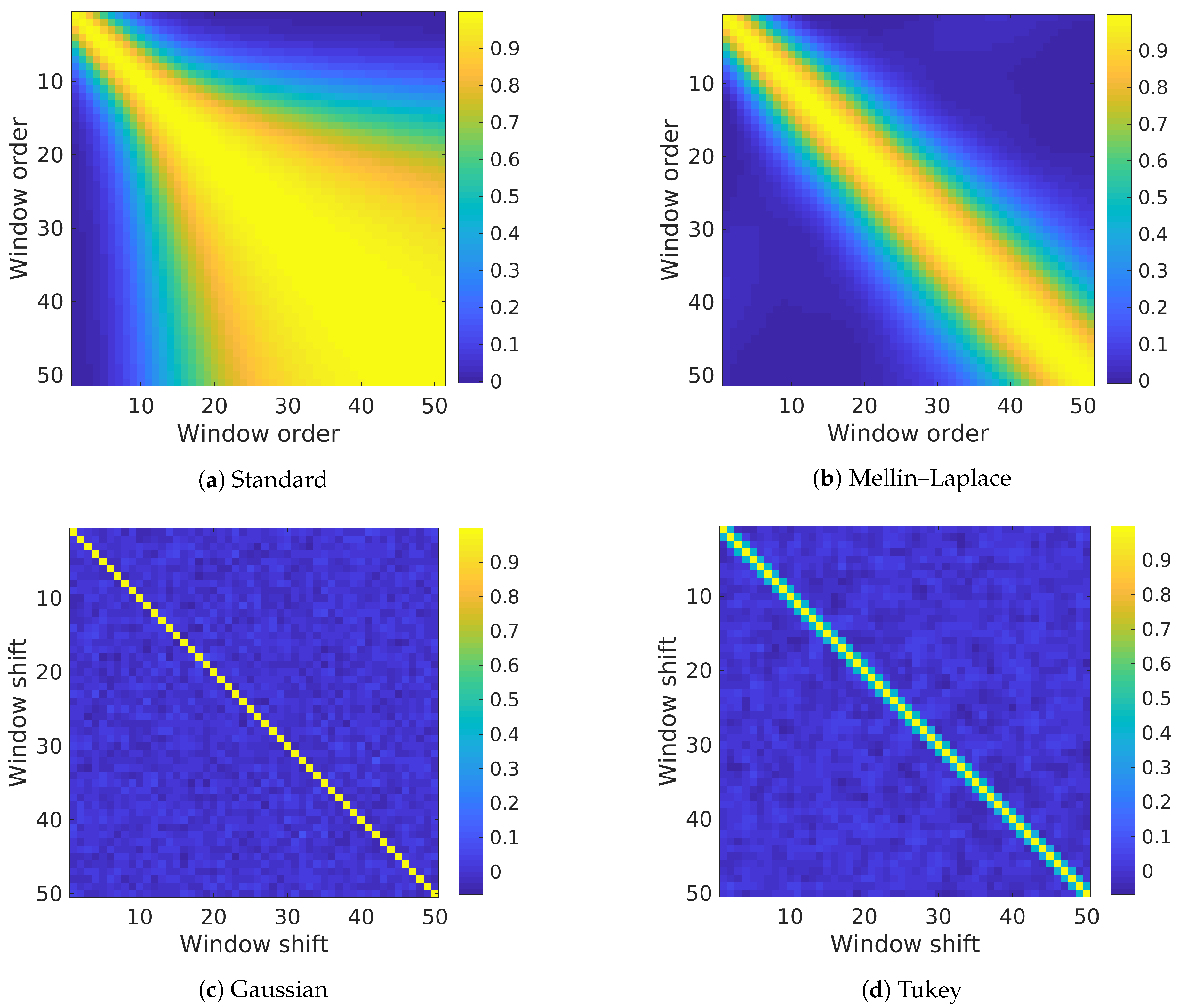
2.4. Noise Correlations
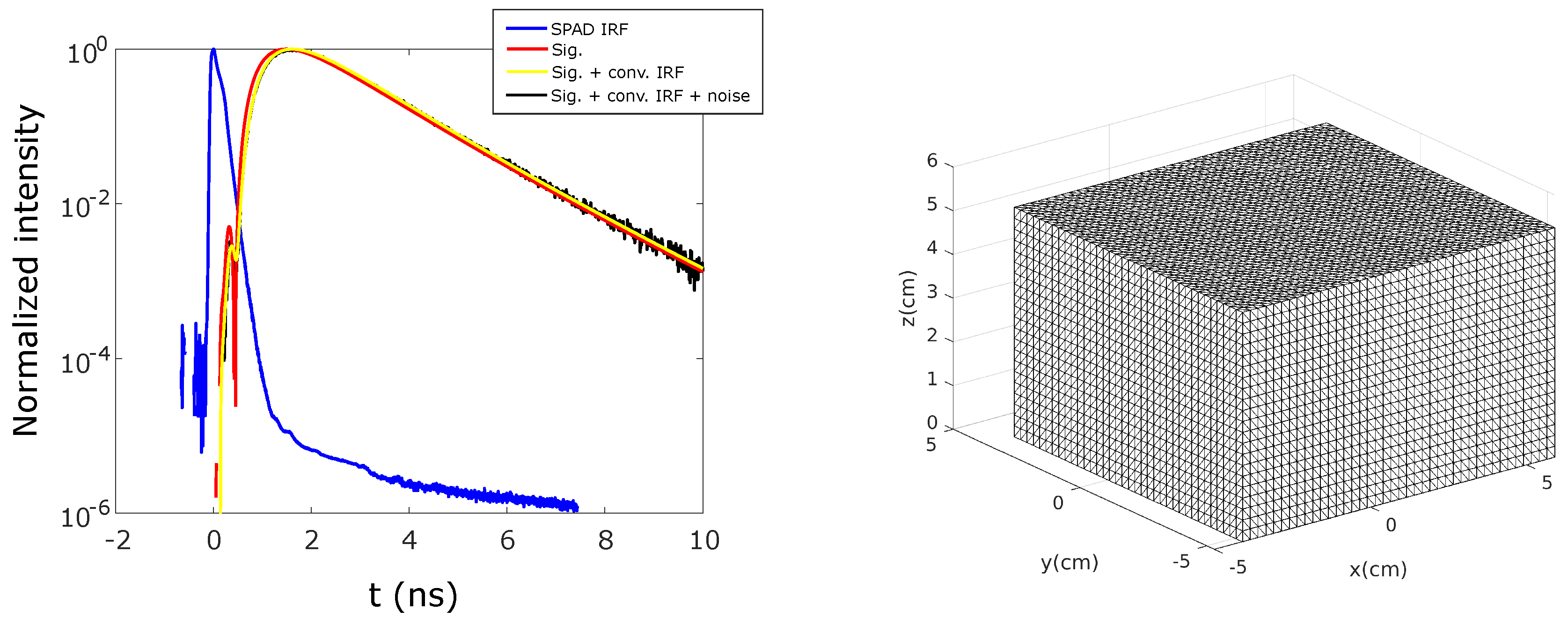
2.5. Numerical Simulations
2.6. Quantitative Evaluation Metrics
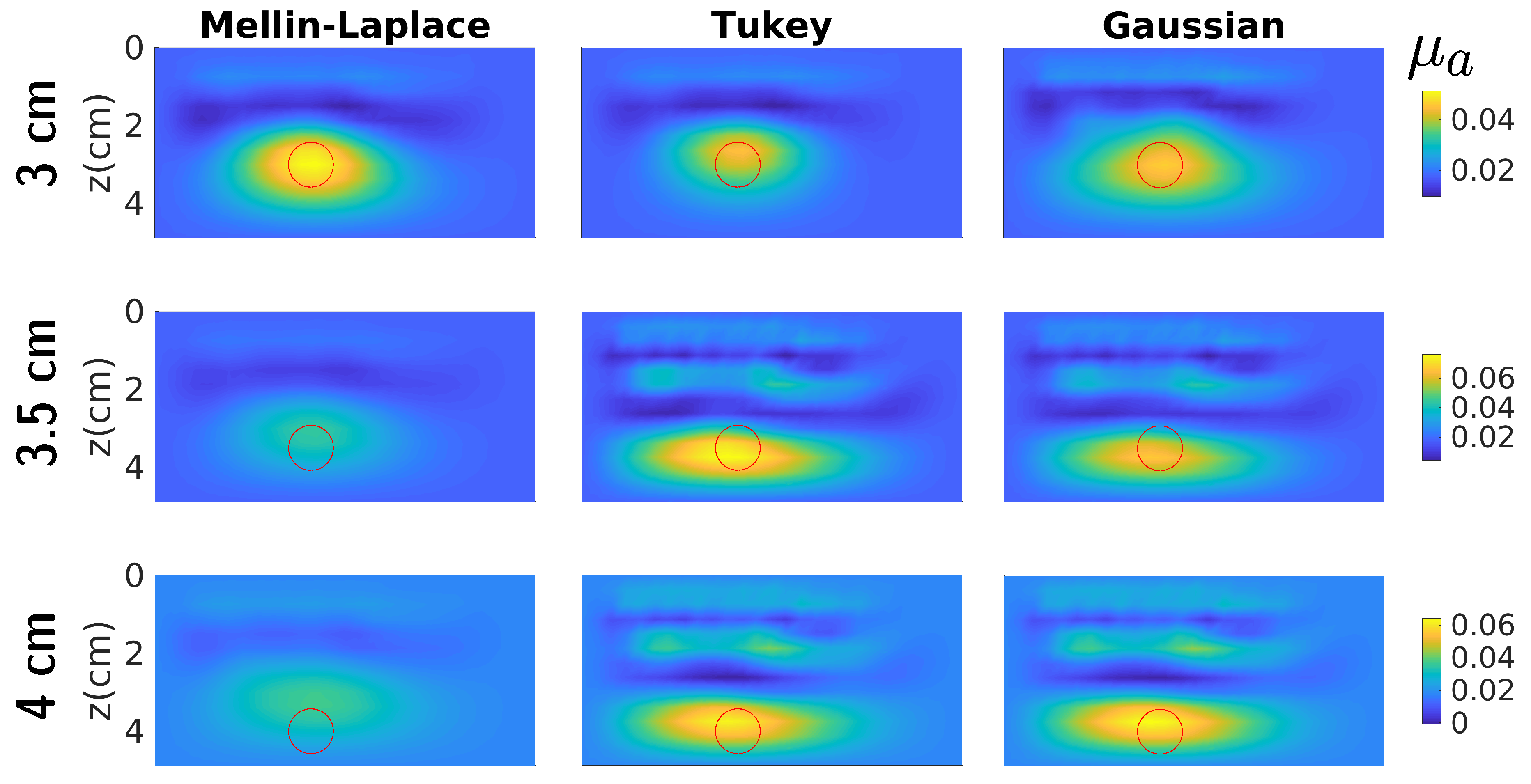
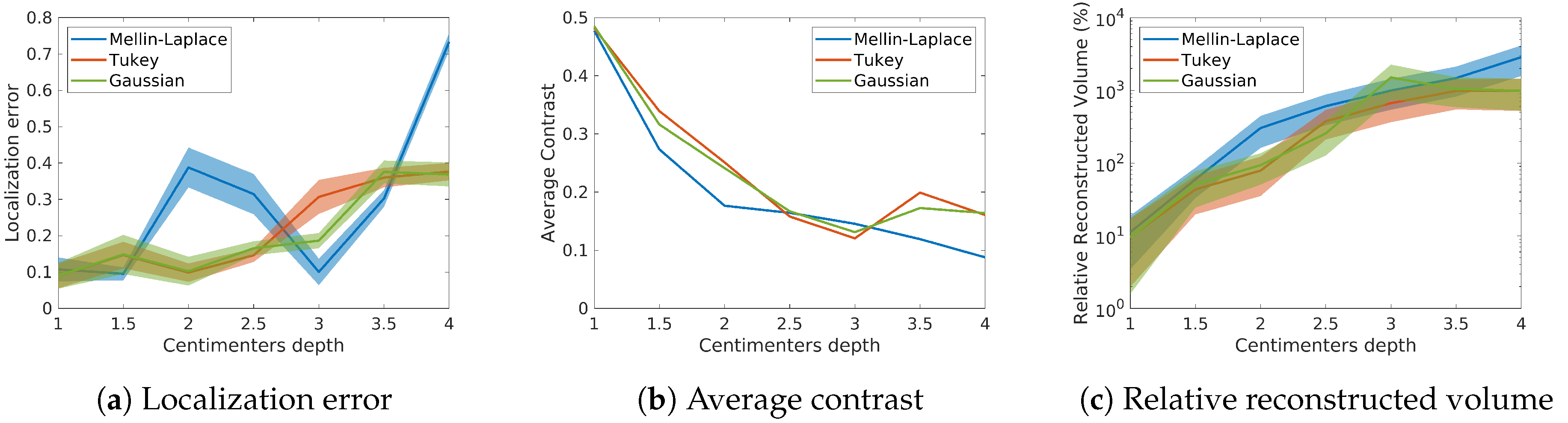
3. Results and Discussion
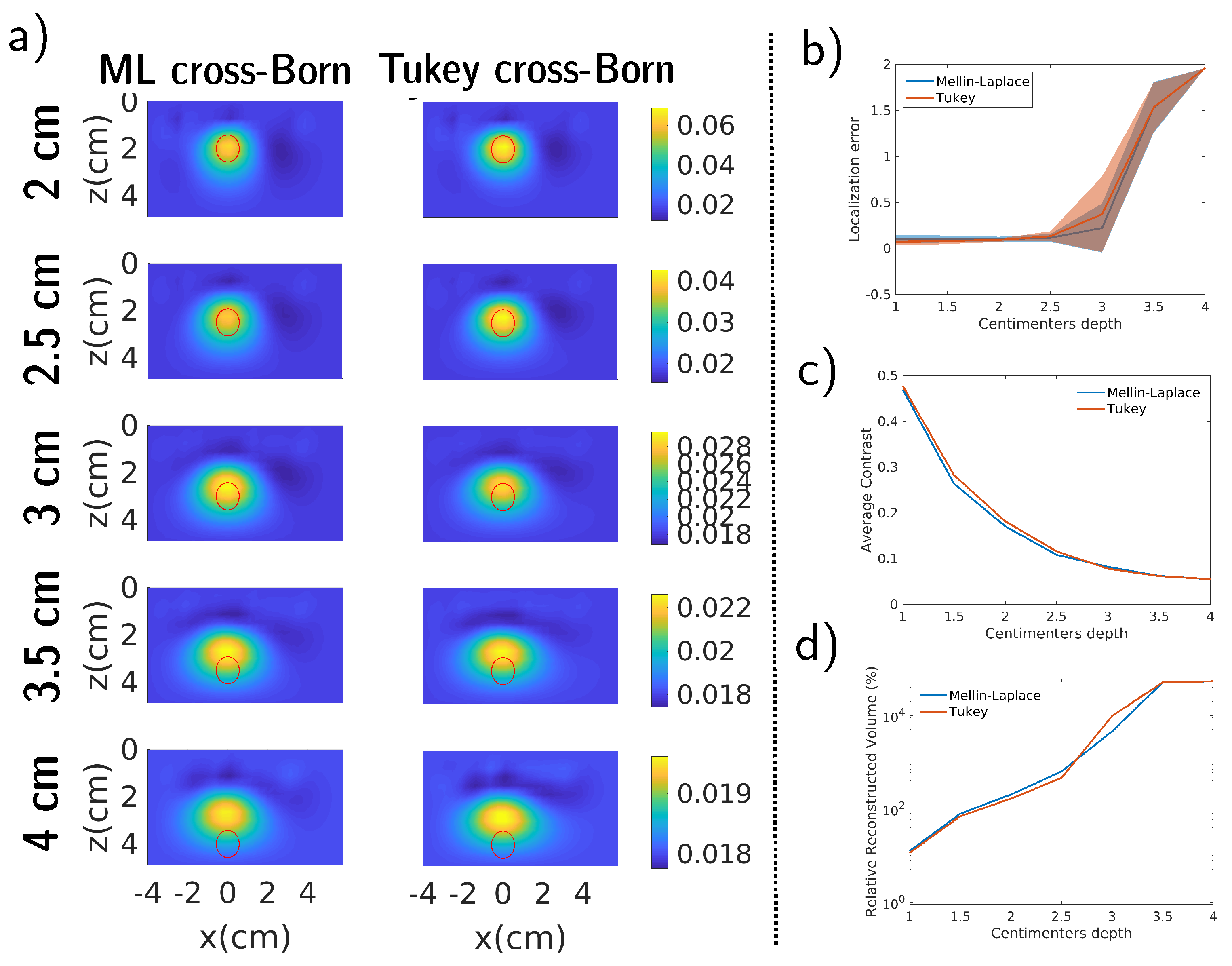
3.1. Comparing State-of-the-Art Windows with Tukey and Gaussian Windows
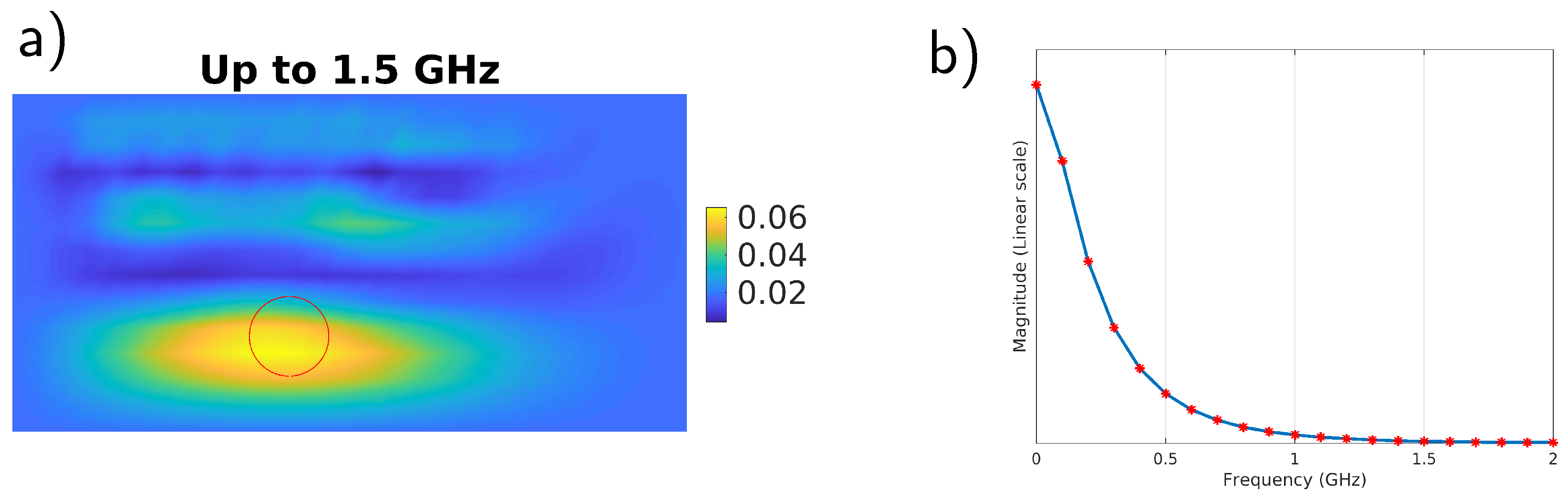
3.2. Comparing Windows and Frequency-Based Reconstruction
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| RTE | Radiative Transfer Equation |
| FT | Fourier Transform |
| DTOF | Distribution of Photon Time Of Flight |
| SPAD | Single Photon Avalanche Diode detector |
Appendix A. Windows Selectivity Calculations
Appendix A.1. Gaussian Window
Appendix A.2. Laplacian Distribution
Appendix A.3. Rectangle Function
Appendix A.4. Mellin-Laplace Moments
Appendix B. Fourier Transform Influence on Noise
References
- Weigl, W.; Milej, D.; Janusek, D.; Wojtkiewicz, S.; Sawosz, P.; Kacprzak, M.; Gerega, A.; Maniewski, R.; Liebert, A. Application of optical methods in the monitoring of traumatic brain injury: A review. J. Cereb. Blood Flow Metab. 2016, 36, 1825–1843. [Google Scholar] [CrossRef] [PubMed]
- Cooper, R.J.; Magee, E.; Everdell, N.; Magazov, S.; Varela, M.; Airantzis, D.; Gibson, A.P.; Hebden, J.C. MONSTIR II: A 32-channel, multispectral, time-resolved optical tomography system for neonatal brain imaging. Rev. Sci. Instrum. 2014, 85, 053105. [Google Scholar] [CrossRef] [PubMed]
- Taroni, P.; Pifferi, A.; Quarto, G.; Spinelli, L.; Torricelli, A.; Abbate, F.; Villa, A.M.; Balestreri, N.; Menna, S.; Cassano, E.; et al. Noninvasive assessment of breast cancer risk using time-resolved diffuse optical spectroscopy. J. Biomed. Opt. 2010, 15, 060501. [Google Scholar] [CrossRef] [PubMed]
- Lindner, C.; Mora, M.; Farzam, P.; Squarcia, M.; Johansson, J.; Weigel, U.M.; Halperin, I.; Hanzu, F.A.; Durduran, T. Diffuse optical characterization of the healthy human thyroid tissue and two pathological case studies. PLoS ONE 2016, 11, e0147851. [Google Scholar] [CrossRef]
- Singer, J.R.; Grünbaum, F.A.; Kohn, P.; Zubelli, J.P. Image Reconstruction of the Interior of Bodies That Diffuse Radiation. Science 1990, 248, 990–993. [Google Scholar] [CrossRef]
- Arridge, S.R.; Schweiger, M.; Delpy, D.T. Iterative reconstruction of near-infrared absorption images. In Inverse Problems in Scattering and Imaging; International Society for Optics and Photonics: Bellingham, WA, USA, 1992; Volume 1767. [Google Scholar]
- Wang, L.V.; Wu, H. Biomedical Optics: Principles and Imaging; Wiley Publisher: Hoboken, NJ, USA, 2007; p. 376. [Google Scholar]
- Liemert, A.; Reitzle, D.; Kienle, A. Analytical solutions of the radiative transport equation for turbid and fluorescent layered media. Sci. Rep. 2017, 7, 3819. [Google Scholar] [CrossRef]
- Liemert, A.; Kienle, A. Analytical solution of the radiative transfer equation for infinite-space fluence. Phys. Rev. A 2011, 83, 015804. [Google Scholar] [CrossRef] [Green Version]
- Liemert, A.; Kienle, A. Exact and efficient solution of the radiative transport equation for the semi-infinite medium. Sci. Rep. 2013, 3, 2018. [Google Scholar] [CrossRef]
- Wang, L.; Jacques, S.L.; Zheng, L. MCML-Monte Carlo modeling of light transport in multi-layered tissues. Comput. Methods Programs Biomed. 1995, 47, 131–146. [Google Scholar] [CrossRef]
- Fang, Q. Mesh-based Monte Carlo method using fast ray-tracing in Plücker coordinates. Biomed. Opt. Express 2010, 1, 165–175. [Google Scholar] [CrossRef]
- González-Rodríguez, P.; Kim, A.D. Diffuse optical tomography using the one-way radiative transfer equation. Biomed. Opt. Express 2015, 6, 2006–2021. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tarvainen, T.; Vauhkonen, M.; Kolehmainen, V.; Kaipio, J.P. Hybrid radiative-transfer–diffusion model for optical tomography. Appl. Opt. 2005, 44, 876–886. [Google Scholar] [CrossRef] [PubMed]
- Pierrat, R.; Greffet, J.J.; Carminati, R. Photon diffusion coefficient in scattering and absorbing media. JOSA A 2006, 23, 1106–1110. [Google Scholar] [CrossRef]
- Yamada, Y.; Suzuki, H.; Yamashita, Y. Time-domain near-infrared spectroscopy and imaging: A review. Appl. Sci. 2019, 9, 1127. [Google Scholar] [CrossRef] [Green Version]
- Chu, M.; Dehghani, H. Image reconstruction in diffuse optical tomography based on simplified spherical harmonics approximation. Opt. Express 2009, 17, 24208–24223. [Google Scholar] [CrossRef] [PubMed]
- Ma, W.; Zhang, W.; Yi, X.; Li, J.; Wu, L.; Wang, X.; Zhang, L.; Zhou, Z.; Zhao, H.; Gao, F. Time-domain fluorescence-guided diffuse optical tomography based on the third-order simplified harmonics approximation. Appl. Opt. 2012, 51, 8656–8668. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Gu, X.; Fajardo, L.L.; Jiang, H. In vivo breast imaging with diffuse optical tomography based on higher-order diffusion equations. Appl. Opt. 2003, 42, 3163–3169. [Google Scholar] [CrossRef]
- Arridge, S.R.; Schweiger, M.; Hiraoka, M.; Delpy, D.T. A finite element approach for modeling photon transport in tissue. Med. Phys. 1993, 20, 299–309. [Google Scholar] [CrossRef]
- Hervé, L.; Puszka, A.; Planat-Chrétien, A.; Dinten, J.M. Time-domain diffuse optical tomography processing by using the Mellin-Laplace transform. Appl. Opt. 2012, 51, 5978–5988. [Google Scholar] [CrossRef]
- Arridge, S.R.; Schweiger, M. Direct calculation of the moments of the distribution of photon time of flight in tissue with a finite-element method. Appl. Opt. 1995, 34, 2683–2687. [Google Scholar] [CrossRef] [Green Version]
- Arridge, S.R. Optical tomography in medical imaging. Inverse Probl. 1999, 15, R41. [Google Scholar] [CrossRef] [Green Version]
- Soloviev, V.Y.; McGinty, J.; Tahir, K.B.; Neil, M.A.; Sardini, A.; Hajnal, J.V.; Arridge, S.R.; French, P.M.W. Fluorescence lifetime tomography of live cells expressing enhanced green fluorescent protein embedded in a scattering medium exhibiting background autofluorescence. Opt. Lett. 2007, 32, 2034–2036. [Google Scholar] [CrossRef] [PubMed]
- Dehghani, H.; Srinivasan, S.; Pogue, B.W.; Gibson, A. Numerical modelling and image reconstruction in diffuse optical tomography. Philos. Trans. R. Soc. A 2009, 367, 3073–3093. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pogue, B.W.; Patterson, M.S.; Jiang, H.; Paulsen, K.D. Initial assessment of a simple system for frequency domain diffuse optical tomography. Phys. Med. Biol. 1995, 40, 1709. [Google Scholar] [CrossRef] [PubMed]
- Gulsen, G.; Xiong, B.; Birgul, O.; Nalcioglu, O. Design and implementation of a multifrequency near-infrared diffuse optical tomography system. J. Biomed. Opt. 2006, 11, 014020. [Google Scholar] [CrossRef] [Green Version]
- Soloviev, V.Y. Mesh adaptation technique for Fourier-domain fluorescence lifetime imaging. Med. Phys. 2006, 33, 4176–4183. [Google Scholar] [CrossRef]
- Milstein, A.B.; Stott, J.J.; Oh, S.; Boas, D.A.; Millane, R.P.; Bouman, C.A.; Webb, K.J. Fluorescence optical diffusion tomography using multiple-frequency data. J. Opt. Soc. Am. A 2004, 21, 1035–1049. [Google Scholar] [CrossRef]
- Arridge, S.R.; Schweiger, M. Photon-measurement density functions. Part 2: Finite-element-method calculations. Appl. Opt. 1995, 34, 8026–8037. [Google Scholar] [CrossRef] [Green Version]
- Pinsky, M.A. Introduction to Fourier Analysis and Wavelets; American Mathematical Society: Providence, RI, USA, 2002; Volume 102. [Google Scholar]
- Doulgerakis-Kontoudis, M.; Eggebrecht, A.T.; Wojtkiewicz, S.; Culver, J.P.; Dehghani, H. Toward real-time diffuse optical tomography: Accelerating light propagation modeling employing parallel computing on GPU and CPU. J. Biomed. Opt. 2017, 22, 125001. [Google Scholar] [CrossRef] [Green Version]
- Schweiger, M. GPU-accelerated Finite Element Method for Modelling Light Transport in Diffuse Optical Tomography. J. Biomed. Imaging 2011, 2011, 10. [Google Scholar] [CrossRef]
- Liebert, A.; Wabnitz, H.; Grosenick, D.; Möller, M.; Macdonald, R.; Rinneberg, H. Evaluation of optical properties of highly scattering media by moments of distributions of times of flight of photons. Appl. Opt. 2003, 42, 5785–5792. [Google Scholar] [CrossRef] [PubMed]
- Liebert, A.; Wabnitz, H.; Steinbrink, J.; Obrig, H.; Möller, M.; Macdonald, R.; Villringer, A.; Rinneberg, H. Time-resolved multidistance near-infrared spectroscopy of the adult head: Intracerebral and extracerebral absorption changes from moments of distribution of times of flight of photons. Appl. Opt. 2004, 43, 3037–3047. [Google Scholar] [CrossRef] [PubMed]
- Hasnain, A.; Mehta, K.; Zhou, X.; Li, H.; Chen, N. Laplace-domain diffuse optical measurement. Sci. Rep. 2018, 8, 12134. [Google Scholar] [CrossRef] [PubMed]
- Harris, F.J. On the use of windows for harmonic analysis with the discrete Fourier transform. Proc. IEEE 1978, 66, 51–83. [Google Scholar] [CrossRef]
- Wabnitz, H.; Jelzow, A.; Mazurenka, M.; Steinkellner, O.; Macdonald, R.; Milej, D.; Żołek, N.; Kacprzak, M.; Sawosz, P.; Maniewski, R.; et al. Performance assessment of time-domain optical brain imagers, part 2: nEUROPt protocol. J. Biomed. Opt. 2014, 19, 086012. [Google Scholar] [CrossRef]
- Ducros, N.; Hervé, L.; Da Silva, A.; Dinten, J.M.; Peyrin, F. A comprehensive study of the use of temporal moments in time-resolved diffuse optical tomography: Part I. Theoretical material. Phys. Med. Biol. 2009, 54, 7089. [Google Scholar] [CrossRef] [Green Version]
- Ducros, N.; Da Silva, A.; Hervé, L.; Dinten, J.M.; Peyrin, F. A comprehensive study of the use of temporal moments in time-resolved diffuse optical tomography: Part II. Three-dimensional reconstructions. Phys. Med. Biol. 2009, 54, 7107. [Google Scholar] [CrossRef] [Green Version]
- Baltagi, B. Econometrics; Springer: Berlin, Germany, 2008. [Google Scholar]
- Schweiger, M.; Arridge, S.R.; Hiraoka, M.; Delpy, D.T. The finite element method for the propagation of light in scattering media: Boundary and source conditions. Med. Phys. 1995, 22, 1779–1792. [Google Scholar] [CrossRef]
- Zouaoui, J.; Sieno, L.D.; Hervé, L.; Pifferi, A.; Farina, A.; Dalla Mora, A.; Derouard, J.; Dinten, J.M. Chromophore decomposition in multispectral time-resolved diffuse optical tomography. Biomed. Opt. Express 2017, 8, 4772–4787. [Google Scholar] [CrossRef] [Green Version]
- Puszka, A.; Hervé, L.; Planat-Chrétien, A.; Koenig, A.; Derouard, J.; Dinten, J.M. Time-domain reflectance diffuse optical tomography with Mellin-Laplace transform for experimental detection and depth localization of a single absorbing inclusion. Biomed. Opt. Express 2013, 4, 569–583. [Google Scholar] [CrossRef] [Green Version]
- Wojtkiewicz, S.; Durduran, T.; Dehghani, H. Time-resolved near infrared light propagation using frequency domain superposition. Biomed. Opt. Express 2018, 9, 41–54. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hansen, P.C. Discrete Inverse Problems: Insight and Algorithms; SIAM: Philadelphia, PA, USA, 2010. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Window | |
|---|---|
| Mellin-Laplace | |
| Gaussian | |
| Exponential |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Orive-Miguel, D.; Hervé, L.; Condat, L.; Mars, J. Improving Localization of Deep Inclusions in Time-Resolved Diffuse Optical Tomography. Appl. Sci. 2019, 9, 5468. https://doi.org/10.3390/app9245468
Orive-Miguel D, Hervé L, Condat L, Mars J. Improving Localization of Deep Inclusions in Time-Resolved Diffuse Optical Tomography. Applied Sciences. 2019; 9(24):5468. https://doi.org/10.3390/app9245468
Chicago/Turabian StyleOrive-Miguel, David, Lionel Hervé, Laurent Condat, and Jérôme Mars. 2019. "Improving Localization of Deep Inclusions in Time-Resolved Diffuse Optical Tomography" Applied Sciences 9, no. 24: 5468. https://doi.org/10.3390/app9245468
APA StyleOrive-Miguel, D., Hervé, L., Condat, L., & Mars, J. (2019). Improving Localization of Deep Inclusions in Time-Resolved Diffuse Optical Tomography. Applied Sciences, 9(24), 5468. https://doi.org/10.3390/app9245468