Direct Yaw Moment Control for Enhancing Handling Quality of Lightweight Electric Vehicles with Large Load-To-Curb Weight Ratio


Abstract
:1. Introduction
2. Load Sensitivity Analysis
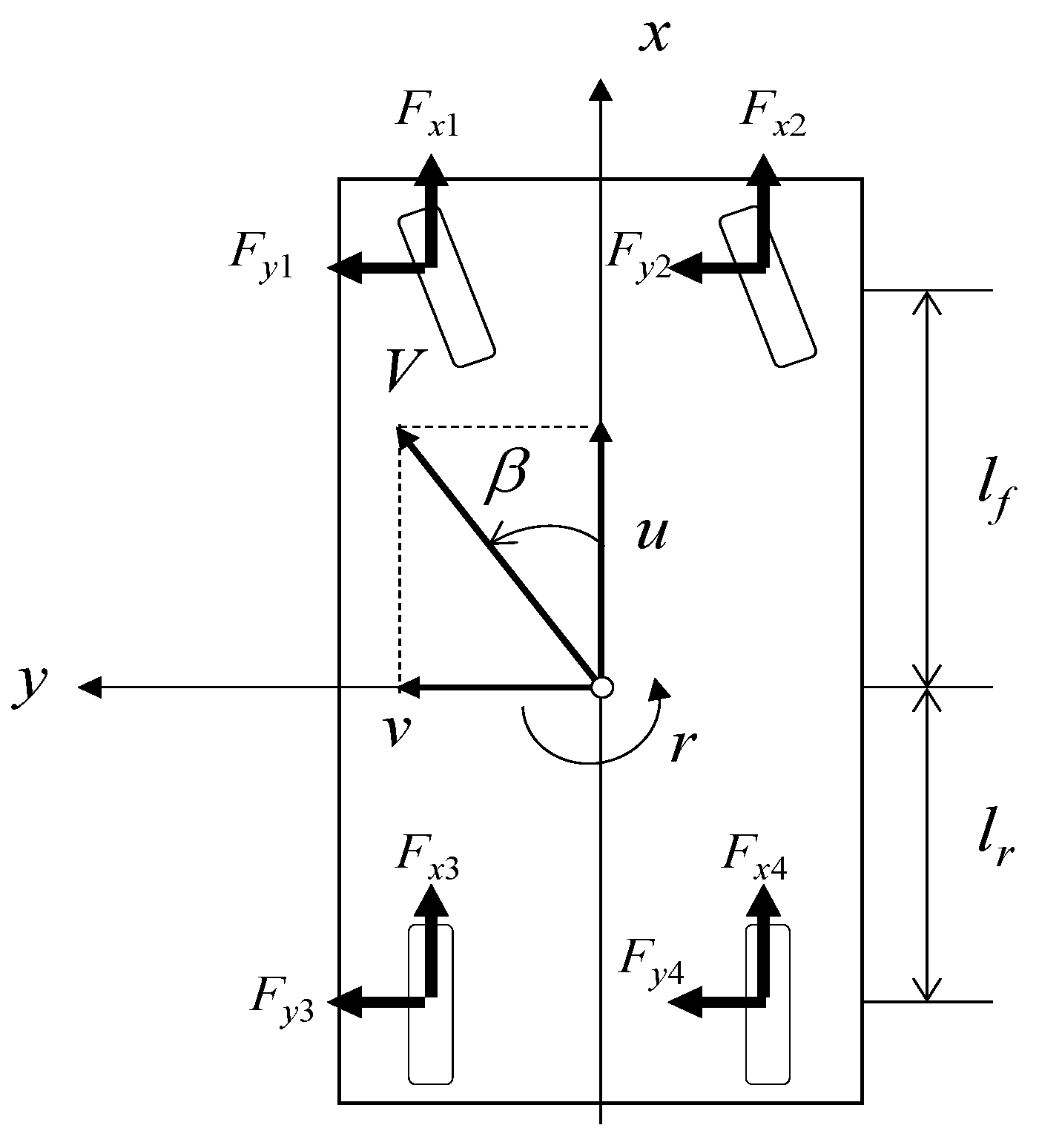
2.1. Vehicle Dynamics Modeling
2.2. Vehicle Parameters
2.3. Handling Quality Evaluation Using TB Factor
3. Design of the Direct Yaw Moment Control System
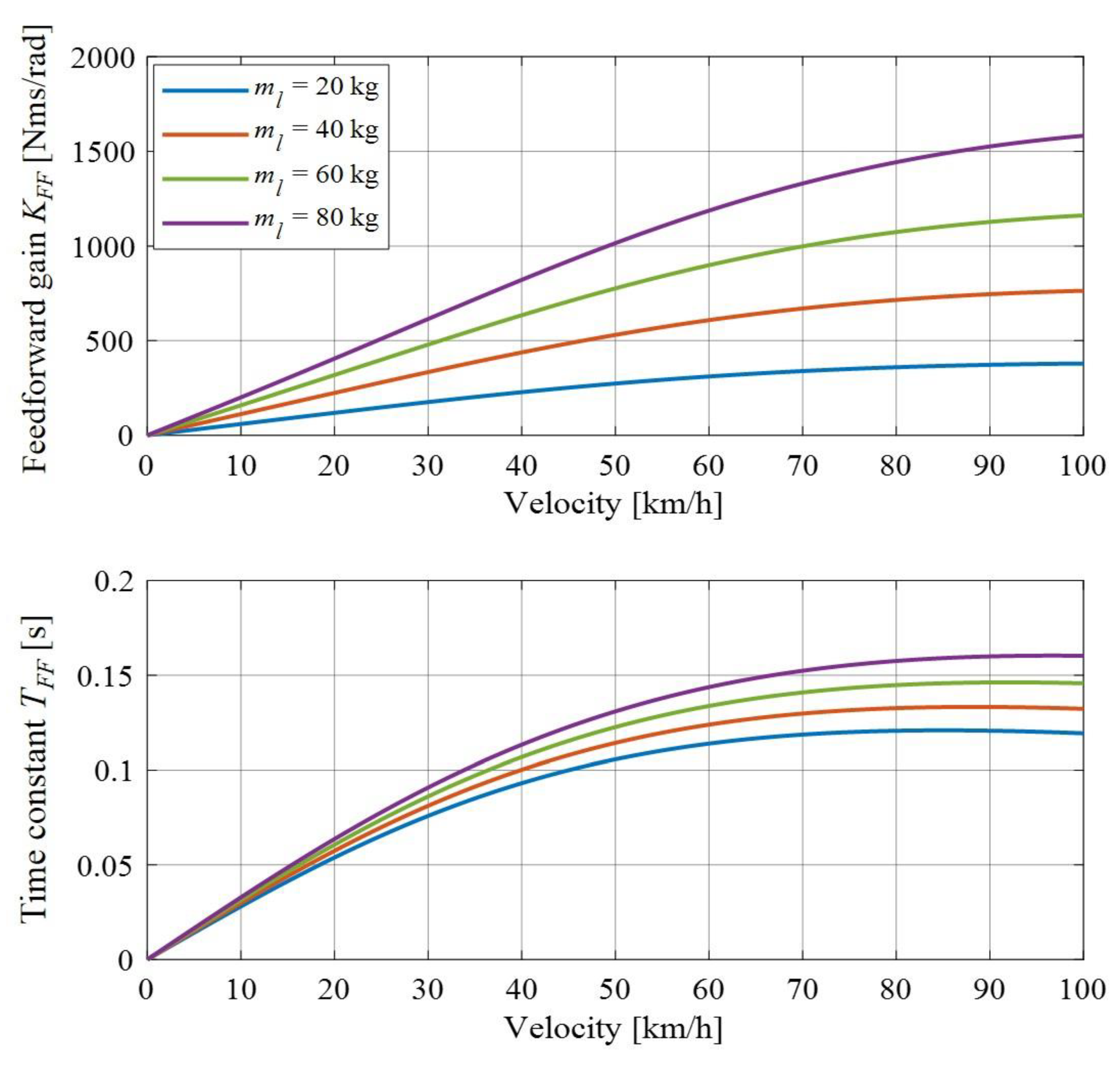
3.1. Feed-Forward Control
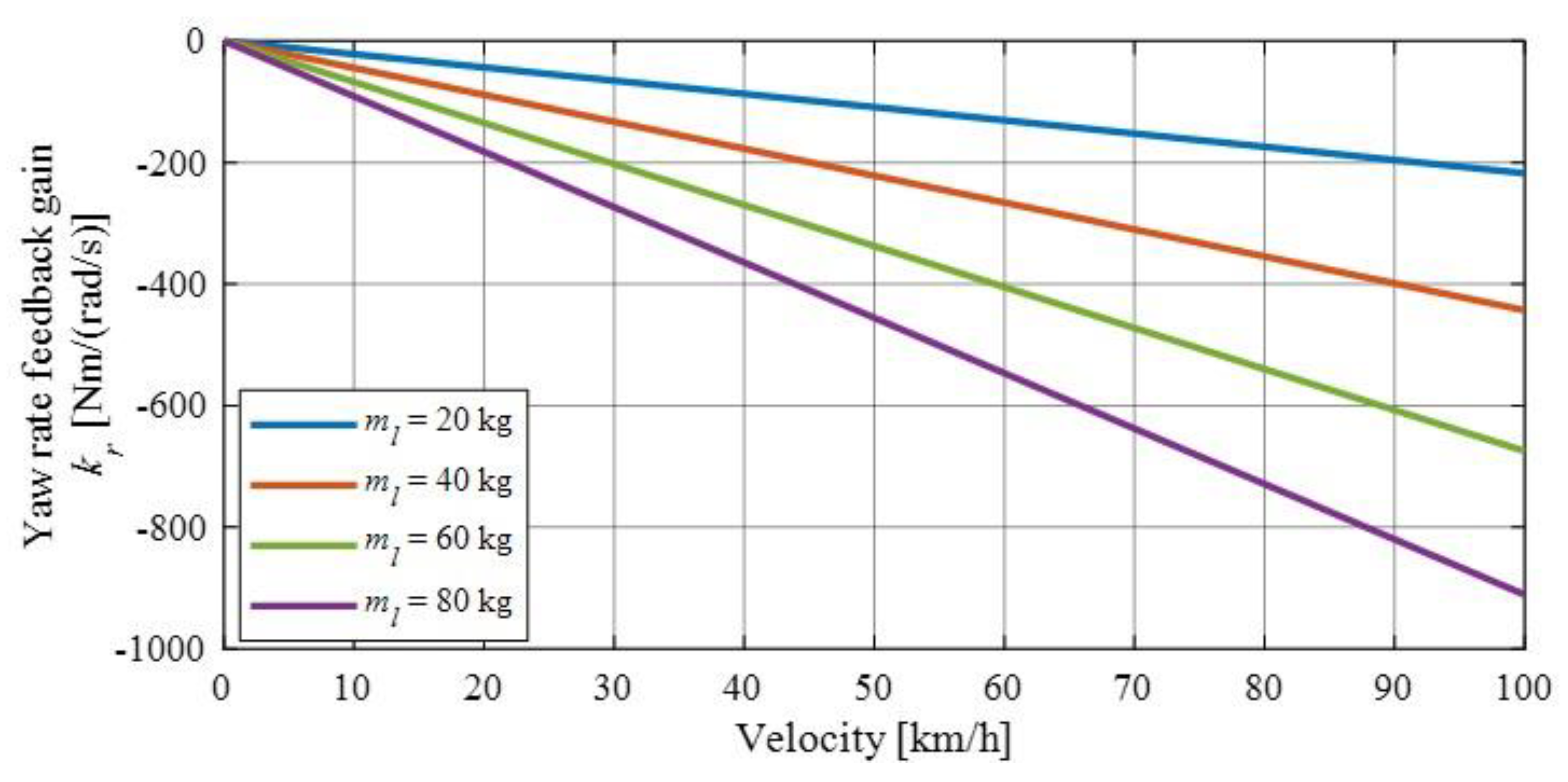
3.2. Feedback Control
3.3. Longitudinal Force Distribution
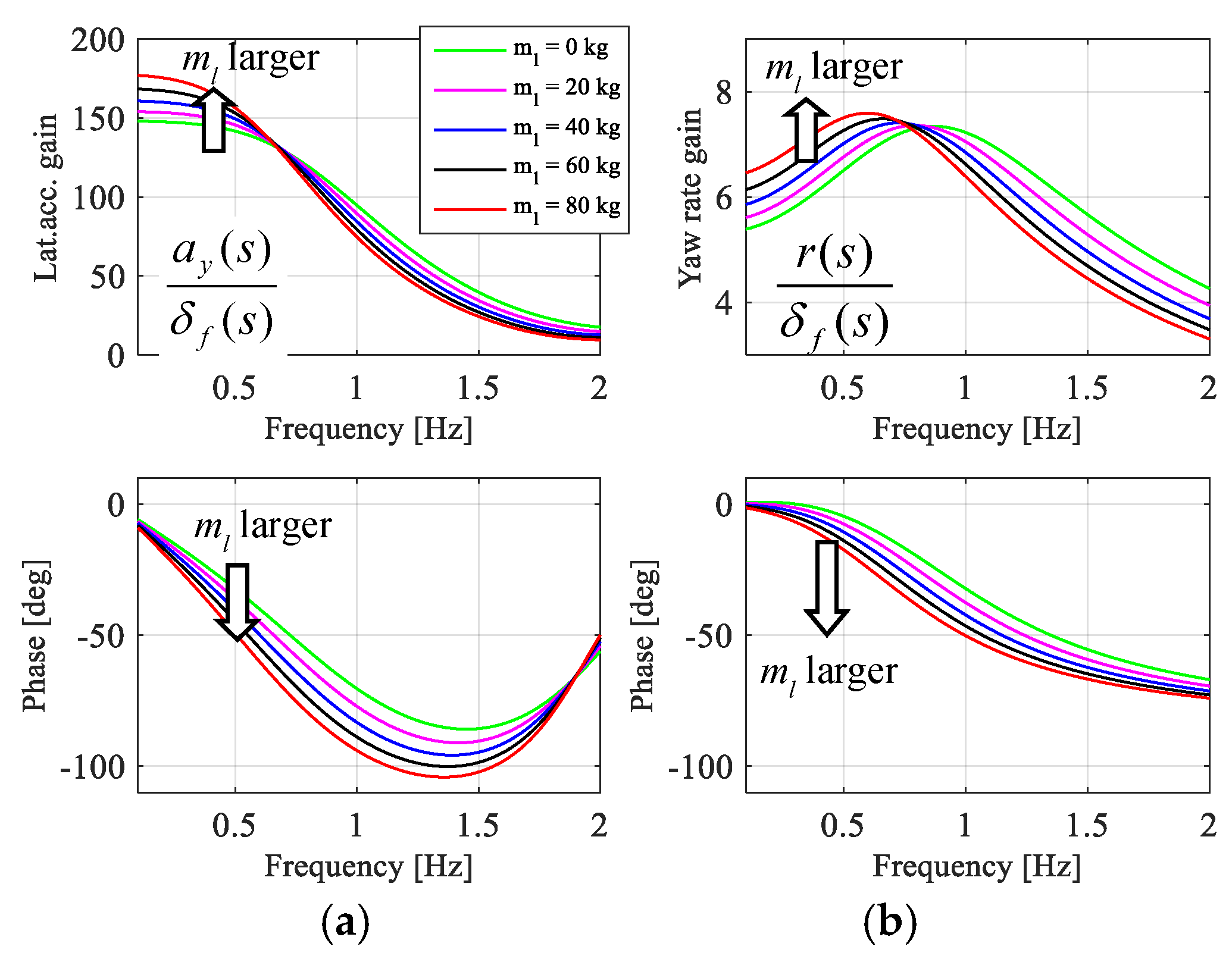
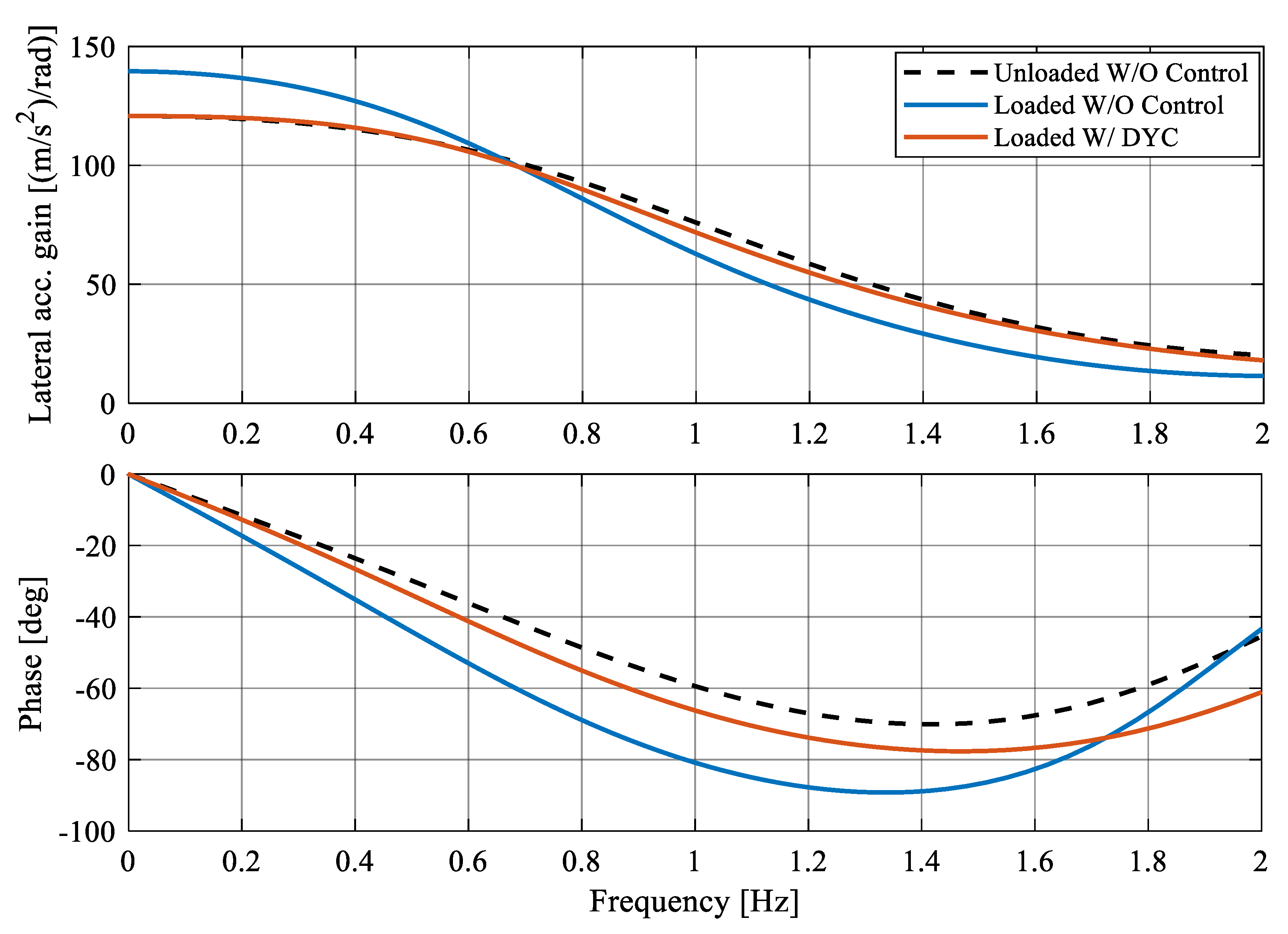
4. Frequency Response of Vehicle Handling Dynamics
5. Simulation Results
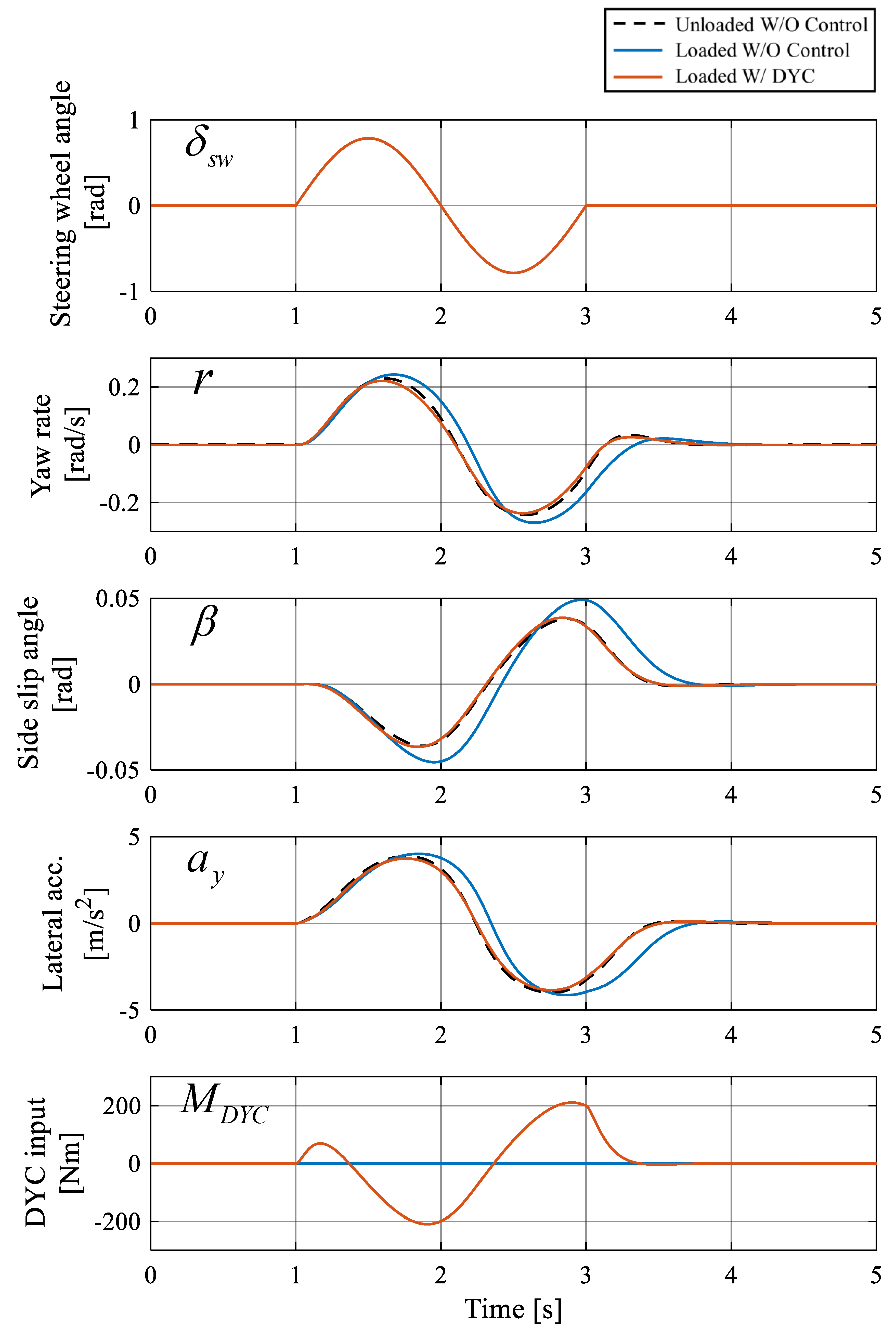
5.1. Open-Loop Test
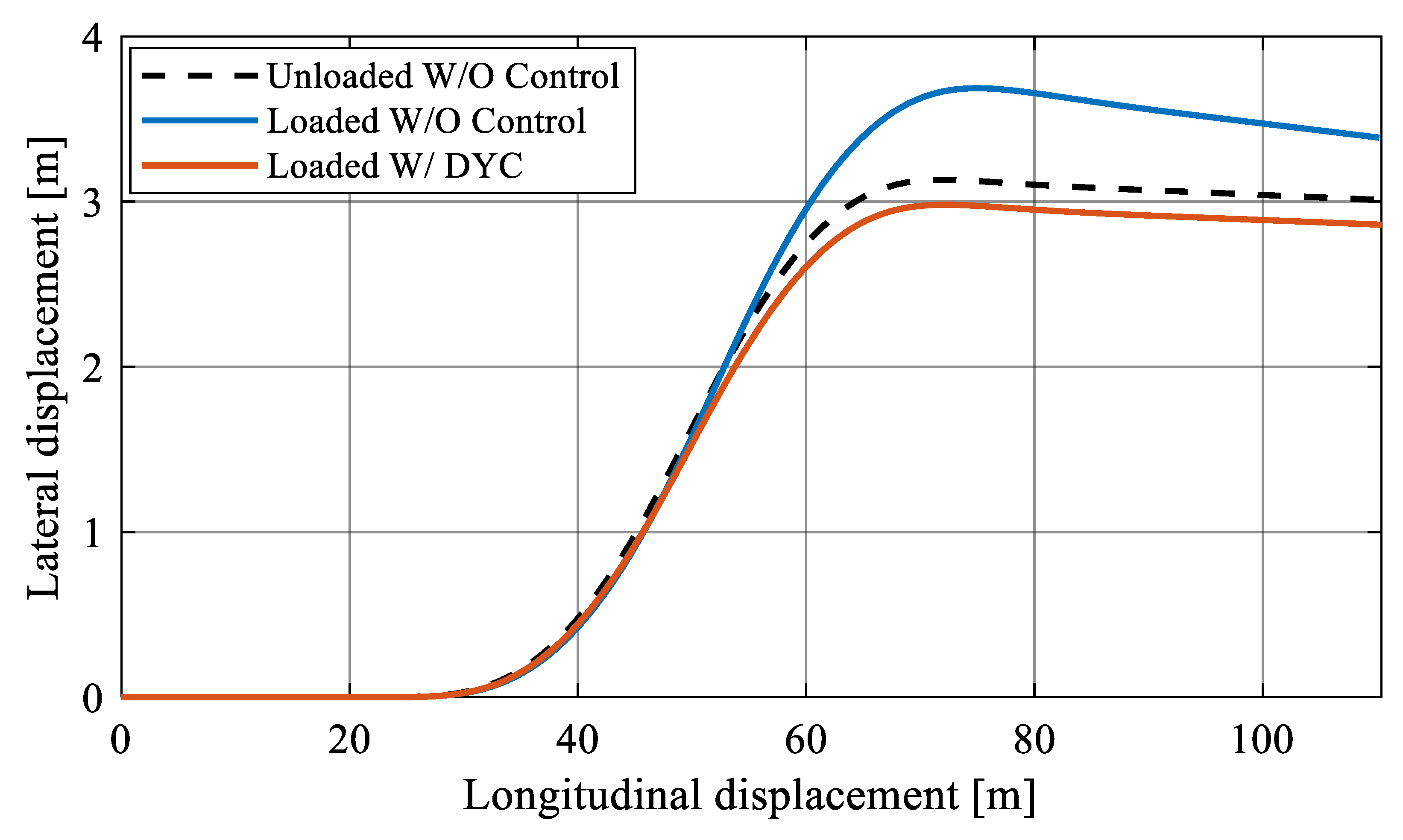
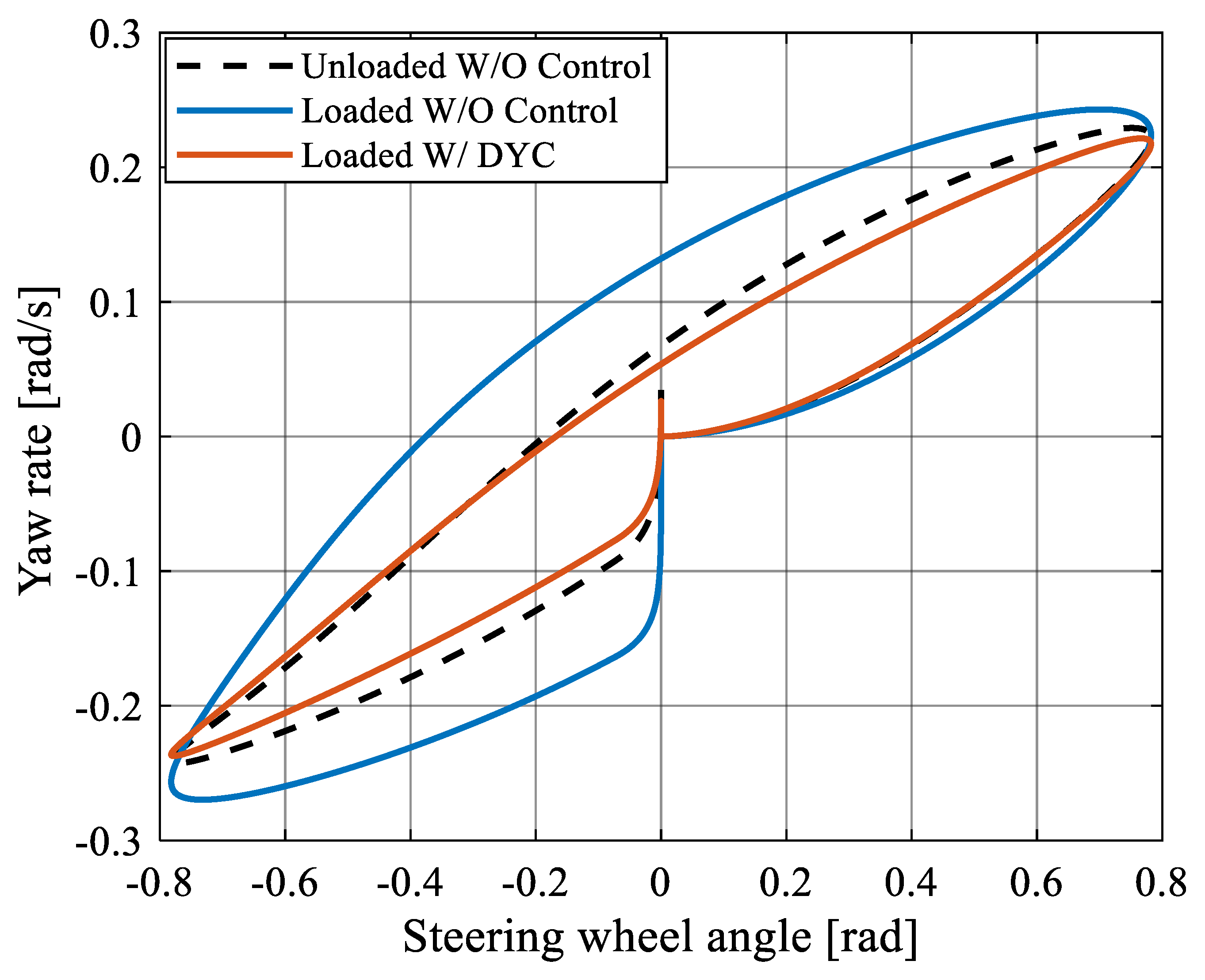
5.2. Closed-Loop Test
6. Experimental Study Using a Driving Simulator
6.1. Experimental Condition
6.2. Evaluation Method
6.3. Results
6.4. Discussions
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kohlhuber, F.; Lienkamp, M. Load problem of lightweight electric vehicles and solution by online model adaptation. In Proceedings of the 5th International Chassis Tech Plus Symposium 2014, Munich, Germany, 24–25 June 2014; Pfeffer, P.E., Ed.; Springer Vieweg: Wiesbaden, Germany, 2014; pp. 281–302. [Google Scholar] [CrossRef]
- Ólafsdóttir, J.M.; Lidberg, M.; Falcone, P.; van Iersel, S.; Jansen, S. Energy Recuperation in Fully Electric Vehicles Subject to Stability and Drivability Requirements. In Proceedings of the 11th International Symposium on Advanced Vehicle Control (AVEC’12), Seoul, Korea, 9–12 September 2012. [Google Scholar]
- Kuwayama, I.; Matsumoto, H.; Heguri, H. Development of a Next Generation-Size Tire for Eco-Friendly Vehicles. In Proceedings of the 4th International Munich Chassis Tech Plus Symposium 2013, Munich, Germany, 13–14 June 2013; Springer Vieweg: Wiesbaden, Germany, 2013; pp. 623–644. [Google Scholar]
- Pruckner, A.; Kaspar, S.; Stroph, R.; Grote, C. Vehicle Dynamics per Software—Potentials of an Electric Single Wheel Drive. In Conference on Future Automotive Technology, Proceedings of the Conference on Future Automotive Technology, Munich, Germany, 7 December 2012; Lienkamp, M., Ed.; Springer Vieweg: Wiesbaden, Germany, 2013. [Google Scholar] [CrossRef]
- Apel, A.; Mitschke, M. Adjusting Vehicle Characteristics by Means of Driver Models. Int. J. Veh. Design 1997, 18, 583–596. [Google Scholar] [CrossRef]
- Hosono, T.; Takekoshi, K.; Shiiba, T. Robust handling performance against weight variation focused on transient region. In The Dynamics of Vehicles on Roads and Tracks: Proceedings of the 24th Symposium of the International Association for Vehicle System Dynamics (IAVSD 2015), Graz, Austria, 17–21 August 2015; Rosenberger, M., Plöchl, M., Six, K., Edelmann, J., Eds.; CRC Press: London, UK, 2016. [Google Scholar] [CrossRef]
- Raksincharoensak, P.; Lertsilpachalern, V.; Lidberg, M.; Henze, R. Robust vehicle handling dynamics of light-weight vehicles against variation in loading conditions. In Proceedings of the 2017 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Vienna, Austria, 27–28 June 2017; IEEE: Vienna, Austria, 2017; pp. 202–207. [Google Scholar] [CrossRef]
- Shibahata, Y.; Shimada, K.; Tomari, T. Improvement of Vehicle Maneuverability by Direct Yaw Moment Control. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 1993, 22, 465–481. [Google Scholar] [CrossRef]
- Abe, M. Vehicle dynamics and control for improving handling and active safety—From 4WS to DYC. Proc. IMechE Part K 1999, 213, 87–101. [Google Scholar] [CrossRef]
- Greger, M. Auswirkungen Einer Variablen Momentenverteilung auf die Fahrdynamik. Ph.D. Thesis, Technische Universität München, Munich, Germany, 2006. [Google Scholar]
- Suzuki, Y.; Kano, Y.; Abe, M. A Study on Tyre Force Distribution Controls for Full Drive-by-Wire Electric Vehicle. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 2014, 52 (Suppl. 1), 235–250. [Google Scholar] [CrossRef]
- Murata, S. Innovation by in-wheel-motor drive unit. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 2012, 50, 807–830. [Google Scholar] [CrossRef]
- Katsuyama, E. Decoupled 3D moment control using in-wheel motors. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 2013, 51, 18–31. [Google Scholar] [CrossRef]
- Shino, M.; Raksincharoensak, P.; Kamata, M.; Nagai, M. Side Slip control of Small-Scale Electric Vehicle by DYC. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 2004, 41, 487–496. [Google Scholar]
- Fujimoto, H.; Tsumasaka, A.; Noguchi, T. Vehicle Stability Control of Small Electric Vehicle on Snowy Road. Rev. Autom. Eng. 2006, 27, 279–286. [Google Scholar]
- Kaspar, S.; Stroph, R.; Bünte, T.; Hohmann, S. Optimisation of vehicle dynamics via torque vectoring for space optimised electric vehicles. ATZ Worldwide 2014, 116, 54–60. [Google Scholar] [CrossRef]
- Pruckner, A.; Davy, E.; Schlichte, D.; Kaspar, S. Electric Single Wheel Drive Optimised Installation Space at Maximum Vehicle Dynamics. ATZ Worldwide 2014, 116, 28–33. [Google Scholar] [CrossRef]
- Bünte, T.; Kaspar, S.; Hohmann, S.; Brembeck, J. Inverse Model Based Torque Vectoring Control for a Rear Wheel Driven Battery Electric Vehicle. In IFAC Proceedings Volumes. In Proceedings of the 19th IFAC World Congress, Cape Town, South Africa, 24–29 August 2014; Volume 47, pp. 12016–12022. [Google Scholar] [CrossRef]
- Kaspar, S.; Ludwig, J.; Bünte, T.; Hohmann, S. Robust Torque Vectoring Control. In IFAC Proceedings Volumes. In Proceedings of the 19th IFAC World Congress, Cape Town, South Africa, 24–29 August 2014; Volume 47, pp. 12023–12028. [Google Scholar] [CrossRef]
- Kohlhuber, F.; Schneider, E.; Lienkamp, M. Potential of Online Model Identification for Vehicle Dynamics Controls of Load Sensitive Lightweight Vehicles. ATZ Worldwide 2015, 117, 20–23. [Google Scholar] [CrossRef]
- Braghin, F.; Sabbioni, E. Development of a Control Strategy for Improving Vehicle Safety in a Hybrid Vehicle with Four Independently Driven In-Wheel-Motors. In Proceedings of the 10th International Symposium on Advanced Vehicle Control (AVEC’10), Loughborough, UK, 22–26 August 2010; Best, M., Ed.; Loughborough University Department of Aeronautical & Automotive Engineering & Transport Studies: Loughborough, UK, 2010; pp. 91–96, ISBN 13-978-0904947656. [Google Scholar]
- Pinto, L.; Aldworth, S.; Watkinson, M.; Jeary, P.; Franco-Jorge, M. Advanced Yaw Motion Control of a Hybrid Vehicle Using Twin Rear Electric Motors. In Proceedings of the 10th International Symposium on Advanced Vehicle Control (AVEC’10), Loughborough, UK, 22–26 August 2010; Best, M., Ed.; Loughborough University Department of Aeronautical & Automotive Engineering & Transport Studies: Loughborough, UK, 2010; pp. 640–645, ISBN 13-978-0904947656. [Google Scholar]
- Kaiser, G.; Chretien, B.; Korte, M.; Werner, H. Torque Vectoring with a feedback and feed forward controller—Applied to a through the road hybrid electric vehicle. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; IEEE: Baden-Baden, Germany, 2011; pp. 448–453. [Google Scholar] [CrossRef]
- Honda, T. Development of Handling Performance Control for SPORT HYBRID SH-AWD; SAE Technical Paper 2015-01-1575, 2015; SAE International: Warrendale, PA, USA, 2015. [Google Scholar] [CrossRef]
- Abe, M. Vehicle Handling Dynamics—Theory and Application, 2nd ed.; Elsevier Butterworth-Heinemann: Oxford, UK, 2015; ISBN 978-0-08-100390-9. [Google Scholar]
- Lincke, W.; Richter, B.; Schmidt, R. Simulation and Measurement of Driver Vehicle Handling Performance; SAE Technical Paper 730489, 1973; SAE International: Warrendale, PA, USA, 1973. [Google Scholar] [CrossRef]
- McRuer, D.T.; Jex, H.R. A Review of Quasi-Linear Pilot Models. IEEE Trans. Hum. Factors Electron. 1967, 8, 231–249. [Google Scholar] [CrossRef]
- Maeda, T.; Irie, N.; Hidaka, K.; Nishimura, H. Performance of Driver-Vehicle System in Emergency Avoidance; SAE Technical Paper 770130, 1977; SAE International: Warrendale, PA, USA, 1977. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameter | Unit | 1 Person Unloaded | 1 Person 20 kg Loaded | 1 Person 40 kg Loaded | 1 Person 60 kg Loaded | 1 Person 80 kg Loaded |
|---|---|---|---|---|---|---|---|
| Mass | kg | 570 | 590 | 610 | 630 | 650 | |
| Front axle to CG Distance | m | 1.162 | 1.218 | 1.271 | 1.321 | 1.368 | |
| Rear axle to CG Distance | m | 0.938 | 0.882 | 0.829 | 0.779 | 0.732 | |
| Front tire cornering stiffness | N/rad | 10,775 | 10,541 | 10,304 | 10,064 | 9819 | |
| Rear tire cornering stiffness | N/rad | 20,243 | 21,443 | 22,558 | 23,589 | 24,536 | |
| Yaw mass moment of inertia | kgm2 | 500 | 552 | 598 | 638 | 674 | |
| Stability Factor | s2/m2 | 0.0019 | 0.0018 | 0.0017 | 0.0015 | 0.0014 |
| Description | Parameter | Unit | 1 Person Unloaded | 1 Person 40 kg Loaded | 1 Person 80 kg Loaded | 1 Person 100 kg Loaded |
|---|---|---|---|---|---|---|
| Time to peak of yaw rate response | sec | 0.328 | 0.396 | 0.477 | 0.527 | |
| Absolute steady-state side slip angle w.r.t. lateral acc. | deg/(m/s2) | 0.377 | 0.408 | 0.440 | 0.457 | |
| TB Factor | sec | 0.124 | 0.162 | 0.210 | 0.241 | |
| Natural frequency | Hz | 1.048 | 0.198 | 0.812 | 0.764 | |
| Damping ratio | - | 0.651 | 0.672 | 0.703 | 0.722 |
| Description | Loading Condition (kg) | Control Condition | Steering Gain (rad/m) | Driver Steering Delay Time Constant (s) | Preview Time (s) |
|---|---|---|---|---|---|
| Symbol | - | ||||
| Condition A | 0 | W/O Control | 0.50 | 0.15 | 1.0 |
| Condition B | 80 | W/O Control | 0.45 | 0.10 | 1.0 |
| Condition C | 80 | W/DYC | 0.50 | 0.15 | 1.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Raksincharoensak, P.; Daisuke, S.; Lidberg, M. Direct Yaw Moment Control for Enhancing Handling Quality of Lightweight Electric Vehicles with Large Load-To-Curb Weight Ratio. Appl. Sci. 2019, 9, 1151. https://doi.org/10.3390/app9061151
Raksincharoensak P, Daisuke S, Lidberg M. Direct Yaw Moment Control for Enhancing Handling Quality of Lightweight Electric Vehicles with Large Load-To-Curb Weight Ratio. Applied Sciences. 2019; 9(6):1151. https://doi.org/10.3390/app9061151
Chicago/Turabian StyleRaksincharoensak, Pongsathorn, Sato Daisuke, and Mathias Lidberg. 2019. "Direct Yaw Moment Control for Enhancing Handling Quality of Lightweight Electric Vehicles with Large Load-To-Curb Weight Ratio" Applied Sciences 9, no. 6: 1151. https://doi.org/10.3390/app9061151
APA StyleRaksincharoensak, P., Daisuke, S., & Lidberg, M. (2019). Direct Yaw Moment Control for Enhancing Handling Quality of Lightweight Electric Vehicles with Large Load-To-Curb Weight Ratio. Applied Sciences, 9(6), 1151. https://doi.org/10.3390/app9061151