
Improved Spatial Knowledge Acquisition through Sensory Augmentation

 , , , and
, , , and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Results
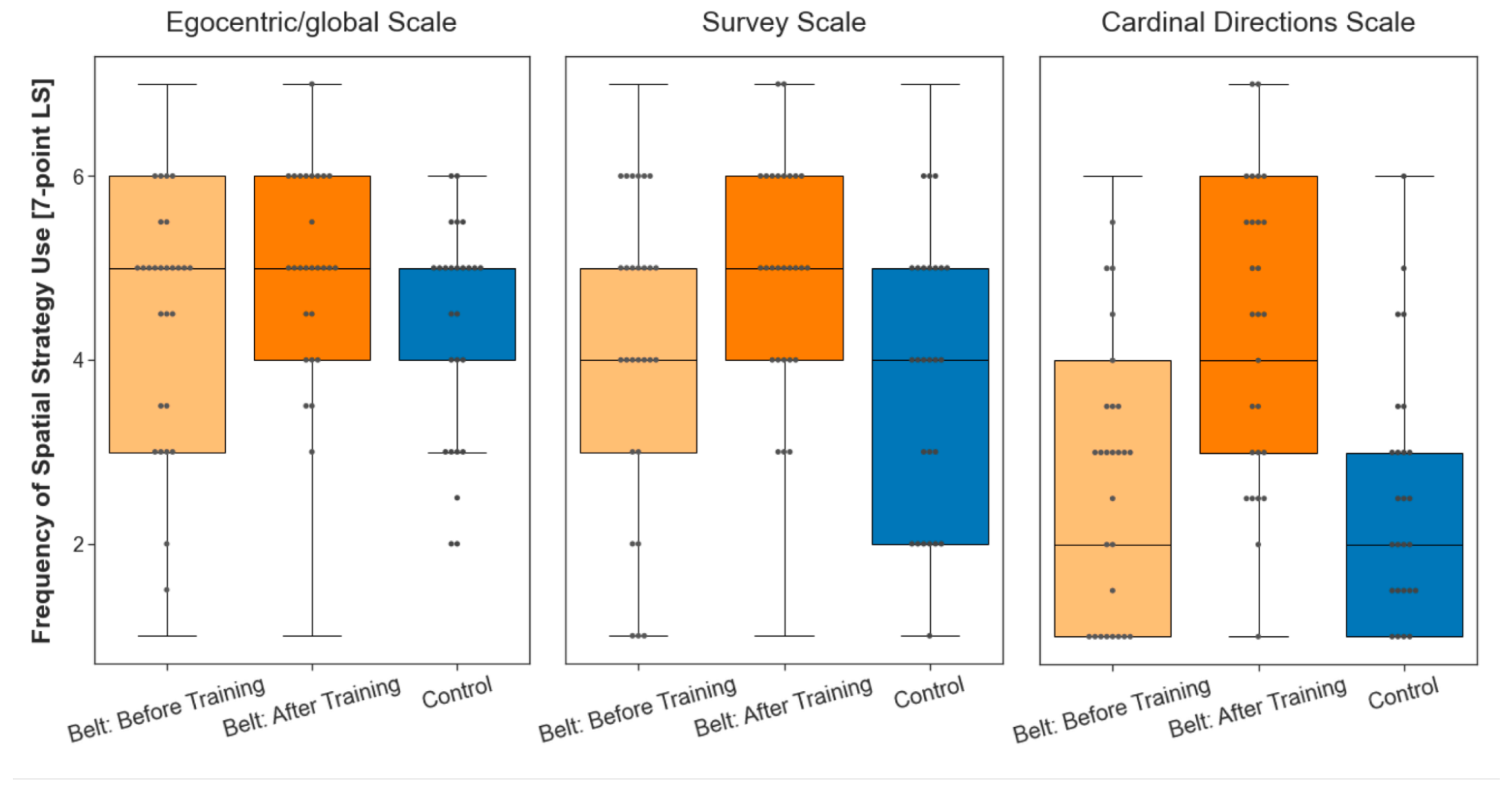
2.1. Baseline Comparison of Spatial Strategy Use
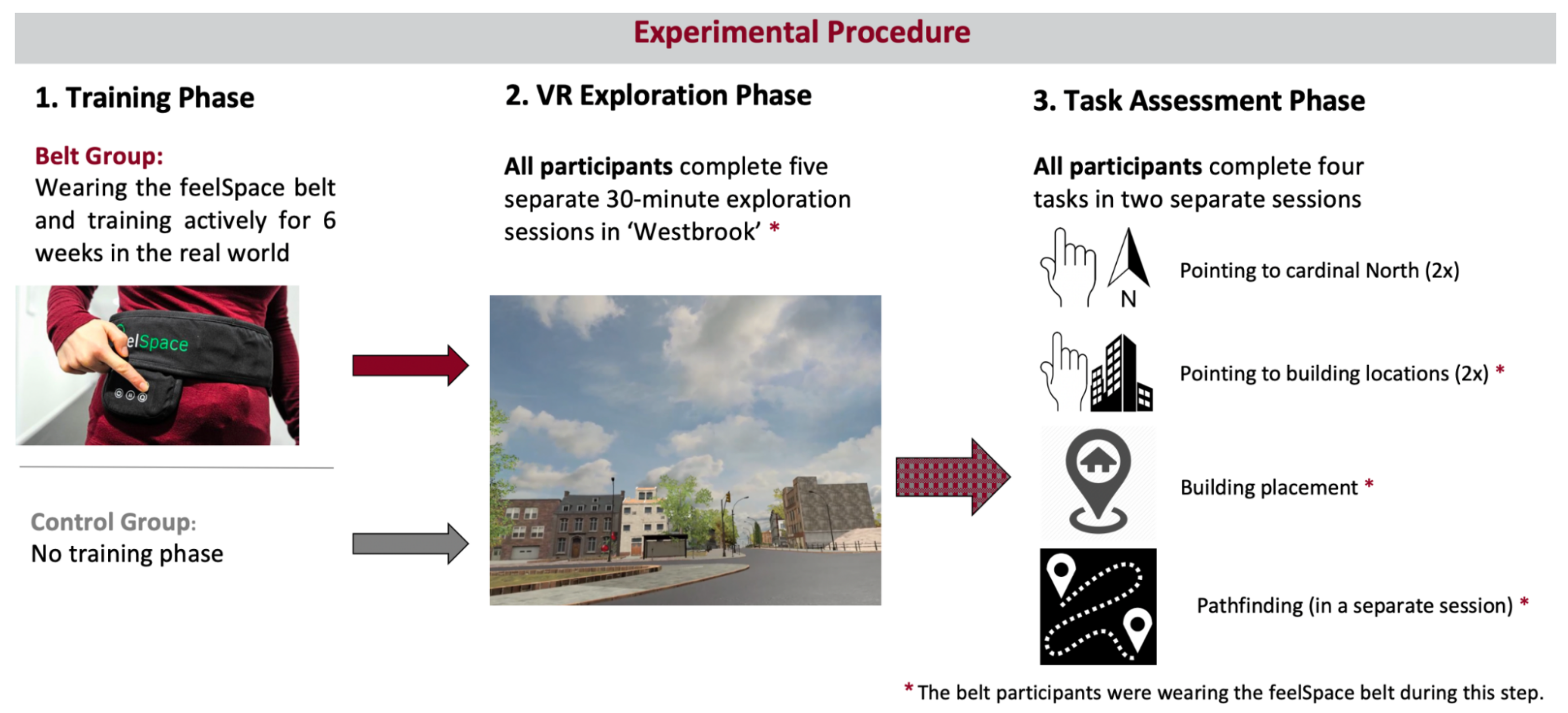
2.2. Training Phase of the Belt Group
2.3. Task Assessment Phase
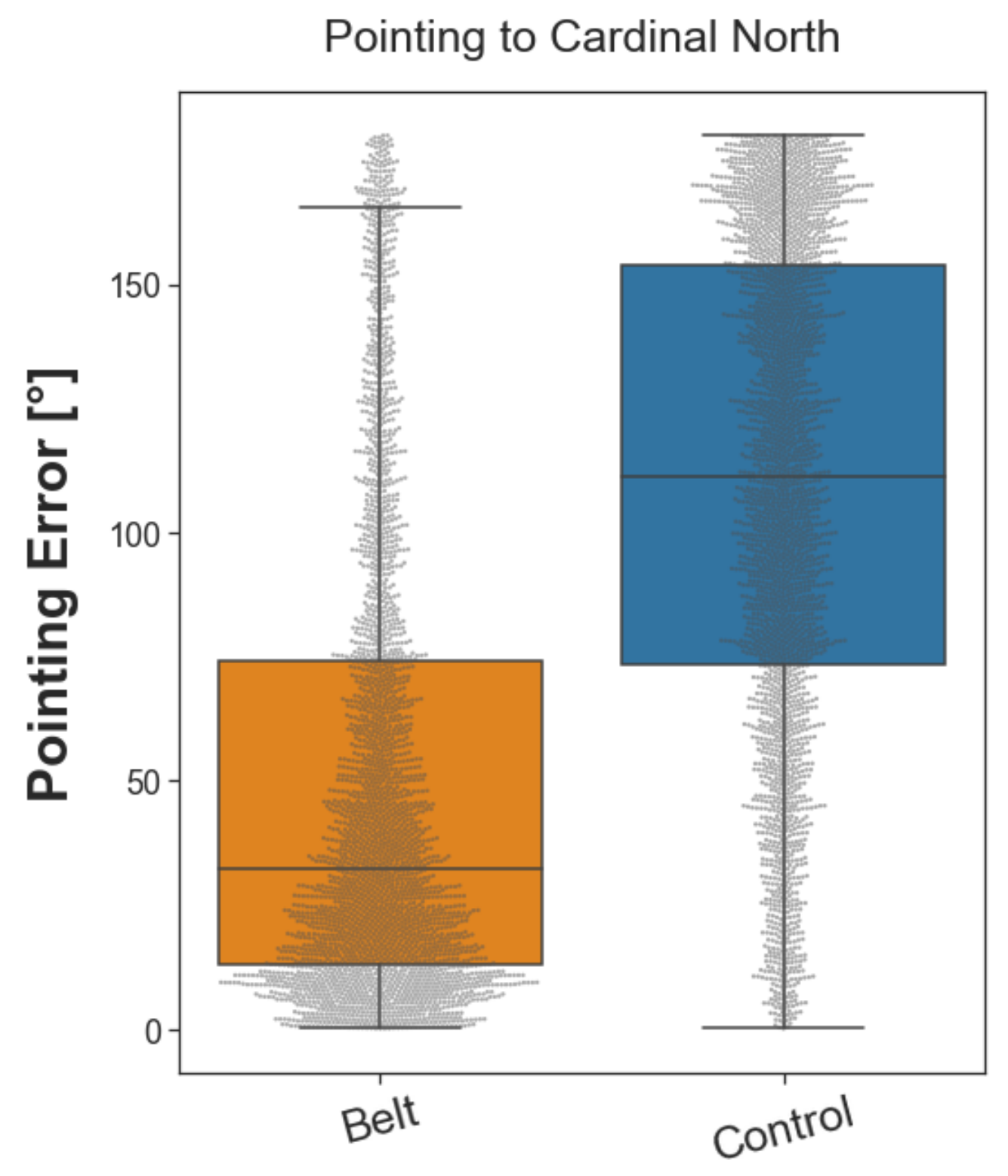
2.3.1. Pointing North
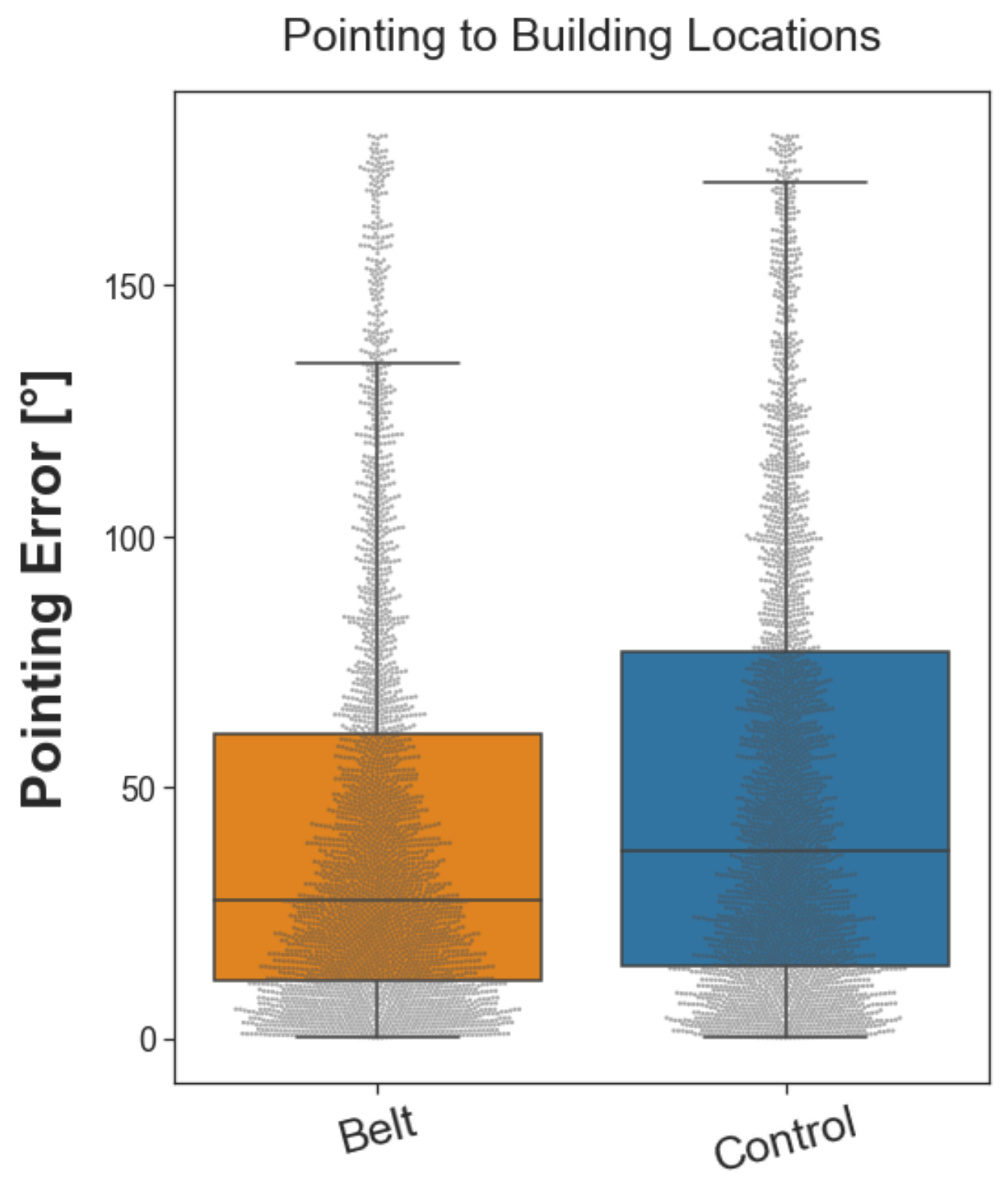
2.3.2. Pointing to Building Locations
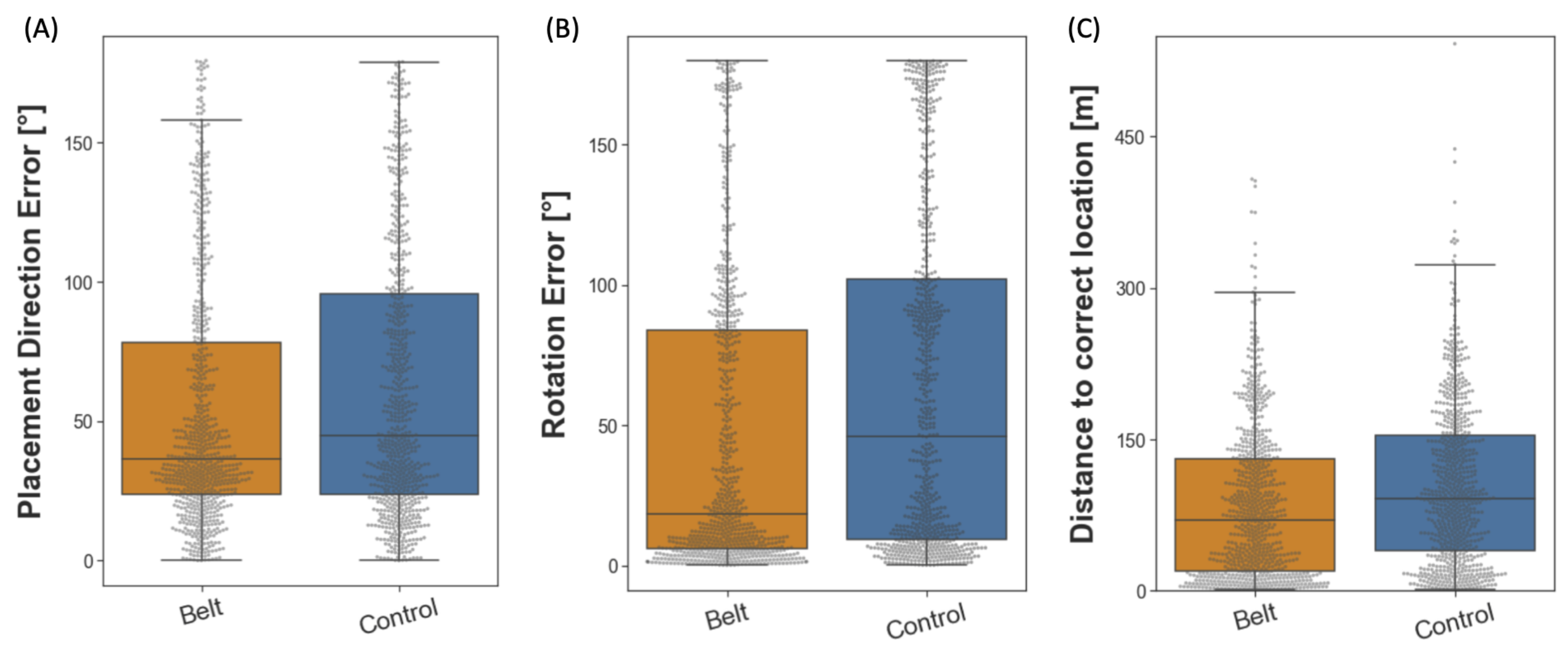
2.3.3. Building Placement
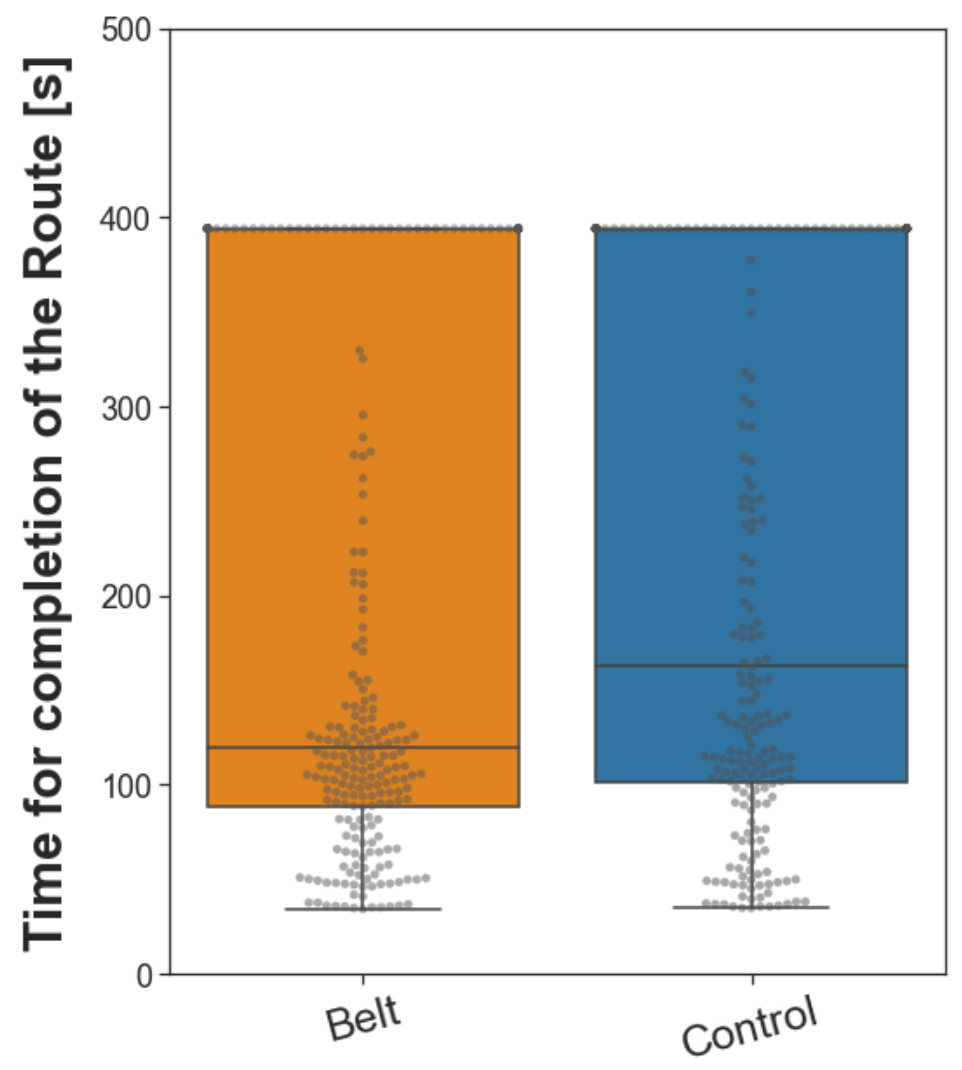
2.3.4. Wayfinding
3. Discussion
3.1. The Effect of the feelSpace Belt on Spatial Knowledge Acquisition
3.2. Sensory Augmentation Can Enhance Human Performance
3.3. Conclusions
4. Materials and Methods
4.1. Participants
4.2. Experimental Setup
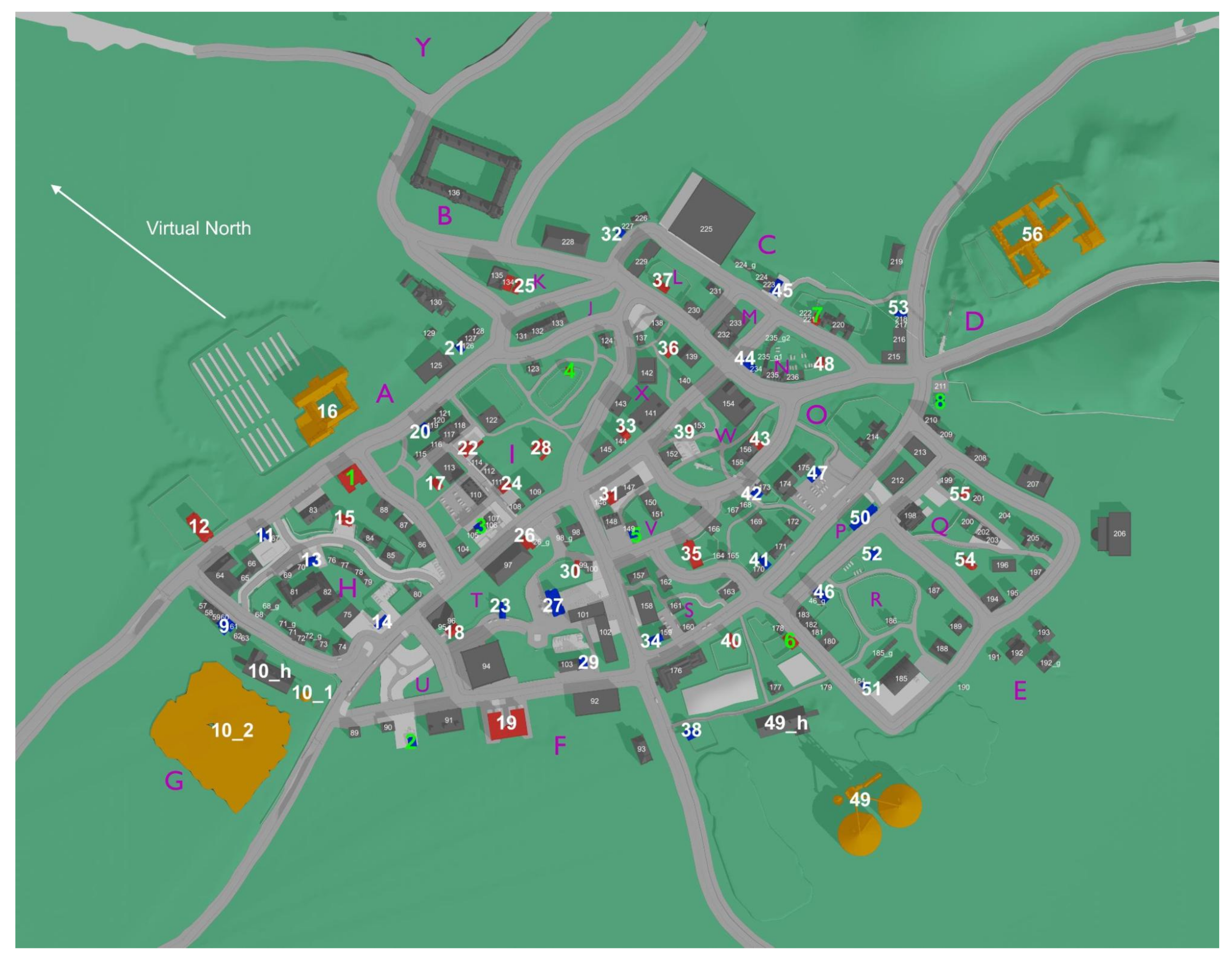
4.2.1. The VR Environment
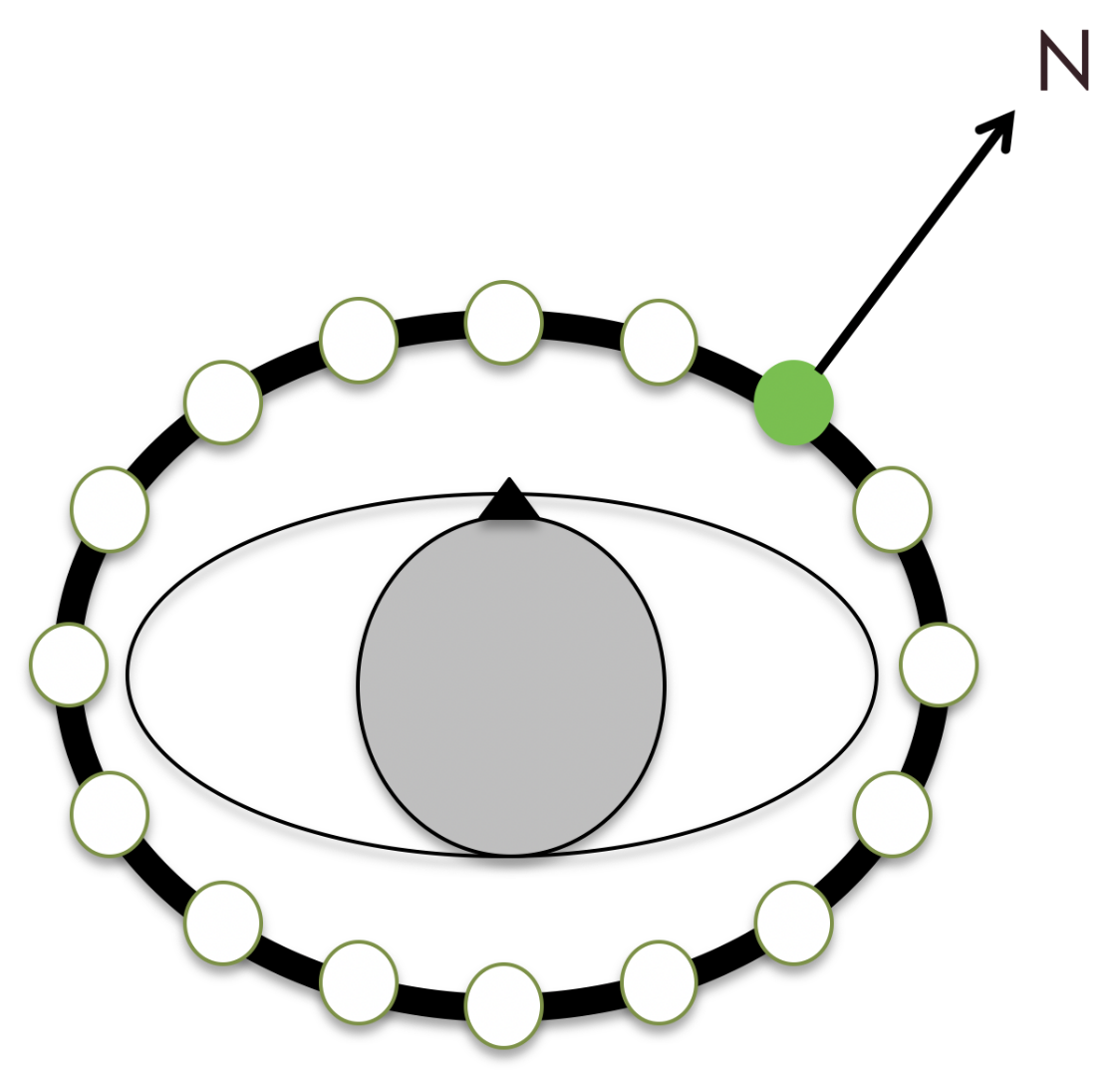
4.2.2. The feelSpace Belt
4.2.3. Experiment Computer and VR System
4.3. Questionnaires
4.4. VR Exploration Phase
4.5. Task Assessment Phase
4.5.1. Pointing North
4.5.2. Pointing to Building Locations
4.5.3. Building Placement
4.5.4. Wayfinding
4.6. Statistical Analyses
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| SMCs | sensorimotor contingencies |
| VR | Virtual Reality |
| AR | Augmented Reality |
| EEG | electroencephalography |
| fMRI | functional magnetic resonance imaging |
| i.e. | id est (“that is”) |
| FRS | Fragebogen Räumlicher Strategien/Spatial Strategy Questionnaire |
| m | meters |
| s | seconds |
| h | hours |
| d | days |
| km | kilometres |
| s | standard deviation |
| M | mean |
| n | number of units in a subgroup of the sample under study |
| W | Wilcoxon test statistic |
| r | Wilcoxon effect size |
| Mdn | median |
| HMD | head-mounted display |
| RAM | random access memory |
| fps | frames per second |
| Hz | Hertz |
| AMOLED | active matrix organic light-emitting diode |
| OSF | Open Science Framework |
| BSc | Bachelor of Science |
| MSc | Master of Science |
| EU | European Union |
| MSCDA | Marie Skłodowska-Curie actions |
| INTUITIVE | INnovative network for Training in toUch InteracTIVE interfaces |
Appendix A
Appendix A.1. Daily Questionnaire
- Please answer the following questions honestly. There are no “correct” or “false” answers. We want to know as exactly as possible what you are experiencing during the experiment with the belt and how that makes you feel. It is important that you fill in this questionnaire on a daily basis, preferably every evening around the same time. Have a great time with the belt and thank you very much in advance!
- Please fill in the date of today [DD, MM, YYYY]
- Please fill in the current time [HH:MM]
- Did you encounter any technical/practical problems with the belt today? (e.g., failures, problems with the fit of the belt, other problems): (Yes/No)
- If you answer to the previous question was yes, please describe the problem as detailed as possible here and contact us immediately:
- Activities with the belt:
- How long did you wear the belt today? Please fill in the precise time in hours (may be rounded off to half an hour):
- Please list activities that you have engaged in with the belt today and specify how long you engaged in the respective activity. [e.g., “Groceries while walking (60 min)”; “Cycling to work and back (25 min)”; “Having a walk through the forest (40min)”] You can use a new line for each activity:
- Sleeping behavior:
- How many hours did you sleep last night [HH:MM]
- Did you sleep during the day today? (Yes/No)
- If your answer to the previous question was “Yes”, please specify how long you slept during the day today. [HH:MM]
- Please specify in how far you agree with the following statement: I slept well last night: (Likert scale: 1–5)
- Did you dream last night? (Yes/No)
- If your answer to the previous question was yes, did you perceive any changes in your dreams? Please describe these:
- Current Wellbeing:
- Please specify in how far you agree with the following statement:
- Today I felt well concerning my health: (Likert scale: 1–5)
- Please indicate how you felt for the majority of the day using the attributes listed below:
- Cheerful: (Likert scale: 1–5)
- Awake: (Likert scale: 1–5)
- Calm: (Likert scale: 1–5)
- Listless: (Likert scale: 1–5)
- Did you realize something special or irregular while wearing the belt today? If yes, please describe your experience as detailed as possible!
- Did you realize something special or irregular while you were not wearing the belt today? If yes, please describe your experience as detailed as possible!
- Free journal/diary entries:
- Here, you have the option to describe things and experiences that are important to you and that you want to share with us:
Appendix A.2. Weekly Questionnaire
- Please answer the following questions honestly. There are no “correct” or “false” answers. We want to know as exactly as possible what you are experiencing during the experiment with the belt and how that makes you feel. It is important that you fill in this questionnaire on a weekly basis, preferably always on the same day.
- Weekly session Nr. (1–6):
- Please fill in the date of today [DD, MM, YYYY]
- Please fill in the current time [HH:MM]
- How much did the belt restrict you during your daily activities this week?
- (Likert scale: 1–5)
- Please indicate in how far you agree with the following statements:
- During the previous week, I was motivated to wear the belt. (Likert scale: 1–5)
- I am consciously perceiving the belt during the entire time that I am wearing it.
- (Likert scale: 1–5)
- Please indicate with the following statements how you perceive the information transmitted by the belt with regard to your position in space:
- I perceive the transmitted information as a vibration. (Likert scale: 1–5)
- I do not perceive the transmitted information as a vibration, but differently.
- (Likert scale: 1–5)
- If you perceive the information transmitted by the belt differently and not as a vibration, please describe this feeling:
- After taking off the belt, I still perceive a sustained feeling of vibration.
- (Likert scale: 1–5)
- While wearing the belt, I am always aware of my location relative to my house (home).
- (Likert scale: 1–5))
- I am consciously concentrating on the belt, in order to be able to use the information that it provides. (Likert scale: 1–5)
- I find it easier with the belt than without the belt to orient myself in a foreign/unknown environment. (Likert scale: 1–5)
- I find it easier with the belt than without the belt to estimate the location of different places relative to other places. (Likert scale: 1–5)
- I possess a “cognitive spatial map” of my living environment, meaning I know exactly where a certain place, that is important to me, is located. (Likert scale: 1–5)
- Did you already have the “cognitive spatial map” of your living environment already before you started wearing the belt? (Yes/No/I do not have a cognitive map)
- With the belt I find it easier than without the belt to estimate how streets are oriented relative to other streets. (Likert scale: 1–5)
- Since I started wearing the belt, I perceive cardinal directions more consciously.
- (Likert scale: 1–5)
- With the belt I feel safer in foreign/unknown environments than without the belt.
- (Likert scale: 1–5)
- My spatial navigation abilities have improved subjectively since I started wearing the belt.
- (Likert scale: 1–5)
- When I take off the belt, my spatial navigation abilities get worse. (Likert scale: 1–5)
- When I am wearing the belt, my fellows react positively to it. (Likert scale: 1–5)
- Taken altogether, I am developing a new perception of space with the belt: (Yes/No)
- If your answer to the previous question was “yes”, please describe in as much detail as possible how you perceive and experience this new perception of space:
- I noted additional specific changes with regard to myself that could be related to the belt: (Yes/No)
- If your answer to the previous question was “yes”, please describe in as much detail as possible which changes you noticed and how the changes express themselves:
References
- Varela, F.J.; Thompson, E.; Rosch, E. The Embodied Mind, Revised Edition: Cognitive Science and Human Experience; MIT Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Wilson, M. Six views of embodied cognition. Psychon. Bull. Rev. 2002, 9, 625–636. [Google Scholar] [CrossRef]
- Engel, A.K.; Maye, A.; Kurthen, M.; König, P. Where’s the action? The pragmatic turn in cognitive science. Trends Cogn. Sci. 2013, 17, 202–209. [Google Scholar] [CrossRef]
- O’Regan, K.J.; Noë, A. A sensorimotor account of vision and visual consciousness. Behav. Brain Sci. 2001, 24, 939–973. [Google Scholar] [CrossRef]
- Gramann, K. Embodiment of Spatial Reference Frames and Individual Differences in Reference Frame Proclivity. Spat. Cogn. Comput. 2013, 13, 1–25. [Google Scholar] [CrossRef]
- Riecke, B.E.; Bodenheimer, B.; McNamara, T.P.; Williams, B.; Peng, P.; Feuereissen, D. Do We Need to Walk for Effective Virtual Reality Navigation? Physical Rotations Alone May Suffice. In Proceedings of the Spatial Cognition VII, Mt. Hood/Portland, OR, USA, 15–19 August 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 234–247. [Google Scholar] [CrossRef]
- Ruddle, R.A.; Volkova, E.; Bülthoff, H.H. Walking improves your cognitive map in environments that are large-scale and large in extent. ACM Trans. Comput.-Hum. Interact. 2011, 18, 1–20. [Google Scholar] [CrossRef]
- Ruddle, R.A.; Volkova, E.; Mohler, B.; Bülthoff, H.H. The effect of landmark and body-based sensory information on route knowledge. Mem. Cognit. 2011, 39, 686–699. [Google Scholar] [CrossRef]
- Waller, D.; Loomis, J.M.; Haun, D.B.M. Body-based senses enhance knowledge of directions in large-scale environments. Psychon. Bull. Rev. 2004, 11, 157–163. [Google Scholar] [CrossRef]
- König, S.U.; Keshava, A.; Clay, V.; Rittershofer, K.; Kuske, N.; König, P. Embodied Spatial Knowledge Acquisition in Immersive Virtual Reality: Comparison to Map Exploration. Front. Virtual 2021, 2. [Google Scholar] [CrossRef]
- Meilinger, T.; Frankenstein, J.; Bülthoff, H.H. Learning to navigate: Experience versus maps. Cognition 2013, 129, 24–30. [Google Scholar] [CrossRef] [PubMed]
- Montello, D.R.; Waller, D.; Hegarty, M.; Richardson, A.E. Spatial memory of real environments, virtual environments, and maps. In Human Spatial Memory; Psychology Press: London, UK, 2004; pp. 271–306. [Google Scholar]
- Thorndyke, P.W.; Hayes-Roth, B. Differences in spatial knowledge acquired from maps and navigation. Cogn. Psychol. 1982, 14, 560–589. [Google Scholar] [CrossRef]
- Montello, D.R. A new framework for understanding the acquisition. In Spatial and Temporal Reasoning in Geographic Information Systems; Oxford University Press: New York, NY, USA, 1998; Volume 143. [Google Scholar]
- Shelton, A.L.; McNamara, T.P. Orientation and perspective dependence in route and survey learning. J. Exp. Psychol. Learn. Mem. Cogn. 2004, 30, 158–170. [Google Scholar] [CrossRef] [PubMed]
- Siegel, A.W.; White, S.H. The development of spatial representations of large-scale environments. Adv. Child Dev. Behav. 1975, 10, 9–55. [Google Scholar] [CrossRef]
- Taylor, H.A.; Naylor, S.J.; Chechile, N.A. Goal-specific influences on the representation of spatial perspective. Mem. Cognit. 1999, 27, 309–319. [Google Scholar] [CrossRef]
- Chrastil, E.R. Neural evidence supports a novel framework for spatial navigation. Psychon. Bull. Rev. 2013, 20, 208–227. [Google Scholar] [CrossRef]
- Krieg-Brückner, B.; Röfer, T.; Carmesin, H.O.; Müller, R. A Taxonomy of Spatial Knowledge for Navigation and its Application to the Bremen Autonomous Wheelchair. In Spatial Cognition: An Interdisciplinary Approach to Representing and Processing Spatial Knowledge; Freksa, C., Habel, C., Wender, K.F., Eds.; Springer: Berlin/Heidelberg, Germany, 1998; pp. 373–397. [Google Scholar] [CrossRef]
- Golledge, R.G.; Smith, T.R.; Pellegrino, J.W.; Doherty, S.; Marshall, S.P. A conceptual model and empirical analysis of children’s acquisition of spatial knowledge. J. Environ. Psychol. 1985, 5, 125–152. [Google Scholar] [CrossRef]
- Gallagher, S. Enactivist Interventions: Rethinking the Mind; Oxford University Press: New York, NY, USA, 2017. [Google Scholar]
- Dozio, N.; Maggioni, E.; Pittera, D.; Gallace, A.; Obrist, M. May I Smell Your Attention: Exploration of Smell and Sound for Visuospatial Attention in Virtual Reality. Front. Psychol. 2021, 12, 671470. [Google Scholar] [CrossRef] [PubMed]
- Ehinger, B.V.; Fischer, P.; Gert, A.L.; Kaufhold, L.; Weber, F.; Pipa, G.; König, P. Kinesthetic and vestibular information modulate alpha activity during spatial navigation: A mobile EEG study. Front. Hum. Neurosci. 2014, 8, 71. [Google Scholar] [CrossRef]
- Fialho, L.; Oliveira, J.; Filipe, A.; Luz, F. Soundspace VR: Spatial navigation using sound in virtual reality. Virtual Real. 2021, 27, 397–405. [Google Scholar] [CrossRef]
- Maggioni, E.; Cobden, R.; Dmitrenko, D.; Hornbæk, K.; Obrist, M. SMELL SPACE: Mapping out the Olfactory Design Space for Novel Interactions. ACM Trans. Comput.-Hum. Interact. 2020, 27, 1–26. [Google Scholar] [CrossRef]
- Michon, P.E.; Denis, M. When and Why Are Visual Landmarks Used in Giving Directions? In Spatial Information Theory: Foundations of Geographic Information Science, Proceedings of the International Conference, COSIT 2001, Morro Bay, CA, USA, 19–23 September 2001; Springer: Berlin/Heidelberg, Germany, 2001; pp. 292–305. [Google Scholar] [CrossRef]
- Velasco, C.; Obrist, M.; Petit, O.; Spence, C. Multisensory Technology for Flavor Augmentation: A Mini Review. Front. Psychol. 2018, 9, 26. [Google Scholar] [CrossRef]
- Schroeder, P.A.; Lohmann, J.; Butz, M.V.; Plewnia, C. Behavioral Bias for Food Reflected in Hand Movements: A Preliminary Study with Healthy Subjects. Cyberpsychol. Behav. Soc. Netw. 2016, 19, 120–126. [Google Scholar] [CrossRef]
- Maples-Keller, J.L.; Bunnell, B.E.; Kim, S.J.; Rothbaum, B.O. The Use of Virtual Reality Technology in the Treatment of Anxiety and Other Psychiatric Disorders. Harv. Rev. Psychiatry 2017, 25, 103–113. [Google Scholar] [CrossRef] [PubMed]
- Hirose, M.; Iwazaki, K.; Nojiri, K.; Takeda, M.; Sugiura, Y.; Inami, M. Gravitamine spice: A system that changes the perception of eating through virtual weight sensation. In Proceedings of the 6th Augmented Human International Conference, Singapore, 9–11 March 2015; Association for Computing Machinery: New York, NY, USA, 2015; pp. 33–40. [Google Scholar] [CrossRef]
- Ikeno, S.; Watanabe, R.; Okazaki, R.; Hachisu, T.; Sato, M.; Kajimoto, H. Change in the Amount Poured as a Result of Vibration When Pouring a Liquid. In Haptic Interaction: Perception, Devices and Applications; Kajimoto, H., Ando, H., Kyung, K.U., Eds.; Springer: Tokyo, Japan, 2015; pp. 7–11. [Google Scholar] [CrossRef]
- Woods, A.T.; Poliakoff, E.; Lloyd, D.M.; Kuenzel, J.; Hodson, R.; Gonda, H.; Batchelor, J.; Dijksterhuis, G.B.; Thomas, A. Effect of background noise on food perception. Food Qual. Prefer. 2011, 22, 42–47. [Google Scholar] [CrossRef]
- Yan, K.S.; Dando, R. A crossmodal role for audition in taste perception. J. Exp. Psychol. Hum. Percept. Perform. 2015, 41, 590–596. [Google Scholar] [CrossRef]
- Youssef, J.; Youssef, L.; Juravle, G.; Spence, C. Plateware and slurping influence regular consumers sensory discriminative and hedonic responses to a hot soup. Int. J. Gastron. Food Sci. 2017, 9, 100–104. [Google Scholar] [CrossRef]
- Ikeno, S.; Okazaki, R.; Hachisu, T.; Sato, M.; Kajimoto, H. Audio-Haptic Rendering of Water Being Poured from Sake Bottle. In Advances in Computer Entertainment, Proceedings of the 10th International Conference, ACE 2013, Boekelo, The Netherlands, 12–15 November 2013; Springer International Publishing: Berlin/Heidelberg, Germany, 2013; pp. 548–551. [Google Scholar] [CrossRef]
- Amedi, A.; Stern, W.M.; Camprodon, J.A.; Bermpohl, F.; Merabet, L.; Rotman, S.; Hemond, C.; Meijer, P.; Pascual-Leone, A. Shape conveyed by visual-to-auditory sensory substitution activates the lateral occipital complex. Nat. Neurosci. 2007, 10, 687–689. [Google Scholar] [CrossRef] [PubMed]
- Maidenbaum, S.; Hannasi, S.; Abboud, S.; Arbel, R.; Shipuznikov, A.; Levy-Tzedek, S.; Chebat, D.; Amedi, A. The EyeCane-distance information for the blind. J. Mol. Neurosci. 2012, 48, S75–S76. [Google Scholar]
- Maidenbaum, S.; Hanassy, S.; Abboud, S.; Buchs, G.; Chebat, D.R.; Levy-Tzedek, S.; Amedi, A. The “EyeCane”, a new electronic travel aid for the blind: Technology, behavior & swift learning. Restorative 2014, 32, 813–824. [Google Scholar] [CrossRef]
- Nagel, S.K.; Carl, C.; Kringe, T.; Märtin, R.; König, P. Beyond sensory substitution—Learning the sixth sense. J. Neural Eng. 2005, 2, R13. [Google Scholar] [CrossRef]
- Kärcher, S.M.; Fenzlaff, S.; Hartmann, D.; Nagel, S.K.; König, P. Sensory augmentation for the blind. Front. Hum. Neurosci. 2012, 6, 37. [Google Scholar] [CrossRef]
- Kaspar, K.; König, S.; Schwandt, J.; König, P. The experience of new sensorimotor contingencies by sensory augmentation. Conscious. Cogn. 2014, 28, 47–63. [Google Scholar] [CrossRef]
- Shull, P.B.; Damian, D.D. Haptic wearables as sensory replacement, sensory augmentation and trainer—A review. J. Neuroeng. Rehabil. 2015, 12, 59. [Google Scholar] [CrossRef] [PubMed]
- König, S.U.; Schumann, F.; Keyser, J.; Goeke, C.; Krause, C.; Wache, S.; Lytochkin, A.; Ebert, M.; Brunsch, V.; Wahn, B.; et al. Learning New Sensorimotor Contingencies: Effects of Long-Term Use of Sensory Augmentation on the Brain and Conscious Perception. PLoS ONE 2016, 11, e0166647. [Google Scholar] [CrossRef] [PubMed]
- Etienne, A.S.; Maurer, R.; Séguinot, V. Path integration in mammals and its interaction with visual landmarks. J. Exp. Biol. 1996, 199, 201–209. [Google Scholar] [CrossRef]
- Etienne, A.S.; Jeffery, K.J. Path integration in mammals. Hippocampus 2004, 14, 180–192. [Google Scholar] [CrossRef]
- Brandebusemeyer, C.; Luther, A.R.; König, S.U.; König, P.; Kärcher, S.M. Impact of a Vibrotactile Belt on Emotionally Challenging Everyday Situations of the Blind. Sensors 2021, 21, 7384. [Google Scholar] [CrossRef]
- Newcombe, N.S. Individual variation in human navigation. Curr. Biol. 2018, 28, R1004–R1008. [Google Scholar] [CrossRef] [PubMed]
- Newcombe, N.S.; Hegarty, M.; Uttal, D. Building a Cognitive Science of Human Variation: Individual Differences in Spatial Navigation. Top. Cogn. Sci. 2022, 15, 6–14. [Google Scholar] [CrossRef]
- Ishikawa, T.; Montello, D.R. Spatial knowledge acquisition from direct experience in the environment: Individual differences in the development of metric knowledge and the integration of separately learned places. Cogn. Psychol. 2006, 52, 93–129. [Google Scholar] [CrossRef]
- König, S.U.; Goeke, C.; Meilinger, T.; König, P. Are allocentric spatial reference frames compatible with theories of Enactivism? Psychol. Res. 2019, 83, 498–513. [Google Scholar] [CrossRef]
- Maguire, E.A.; Burgess, N.; O’Keefe, J. Human spatial navigation: Cognitive maps, sexual dimorphism, and neural substrates. Curr. Opin. Neurobiol. 1999, 9, 171–177. [Google Scholar] [CrossRef] [PubMed]
- Sandstrom, N.J.; Kaufman, J.; Huettel, S.A. Males and females use different distal cues in a virtual environment navigation task. Brain Res. Cogn. Brain Res. 1998, 6, 351–360. [Google Scholar] [CrossRef] [PubMed]
- Schmitz, S. Gender-related strategies in environmental development: Effects of anxiety on wayfinding in and representation of a three-dimensional maze. J. Environ. Psychol. 1997, 17, 215–228. [Google Scholar] [CrossRef]
- Rieser, J.J.; Doxsey, P.A.; McCarrell, N.S.; Brooks, P.H. Wayfinding and toddlers’ use of information from an aerial view of a maze. Dev. Psychol. 1982, 18, 714–720. [Google Scholar] [CrossRef]
- Goldiez, B.F.; Ahmad, A.M.; Hancock, P.A. Effects of Augmented Reality Display Settings on Human Wayfinding Performance. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2007, 37, 839–845. [Google Scholar] [CrossRef]
- Ahmad, A.M.; Goldiez, B.F.; Hancock, P.A. Gender Differences in Navigation and Wayfinding using Mobile Augmented Reality. Proc. Hum. Fact. Ergon. Soc. Annu. Meet. 2005, 49, 1868–1872. [Google Scholar] [CrossRef]
- Cornwell, B.R.; Johnson, L.L.; Holroyd, T.; Carver, F.W.; Grillon, C. Human hippocampal and parahippocampal theta during goal-directed spatial navigation predicts performance on a virtual Morris water maze. J. Neurosci. 2008, 28, 5983–5990. [Google Scholar] [CrossRef] [PubMed]
- Henson, A.; Mallot, H.; Bulthoff, H.; Meilinger, T. When do we integrate spatial information acquired by walking through environmental spaces? In Proceedings of the Annual Meeting of the Cognitive Science Society, Boston, MA, USA, 20–23 July 2011. Volume 33. [Google Scholar]
- Kahana, M.J.; Sekuler, R.; Caplan, J.B.; Kirschen, M.; Madsen, J.R. Human theta oscillations exhibit task dependence during virtual maze navigation. Nature 1999, 399, 781–784. [Google Scholar] [CrossRef]
- Terry, A.V., Jr. Spatial navigation (water maze) tasks. Methods Behav. Anal. Neurosci. 2009, 2, 153–166. [Google Scholar]
- Diersch, N.; Wolbers, T. The potential of virtual reality for spatial navigation research across the adult lifespan. J. Exp. Biol. 2019, 222, jeb187252. [Google Scholar] [CrossRef]
- König, S.U.; Clay, V.; Nolte, D.; Duesberg, L.; Kuske, N.; König, P. Learning of Spatial Properties of a Large-Scale Virtual City With an Interactive Map. Front. Hum. Neurosci. 2019, 13, 240. [Google Scholar] [CrossRef] [PubMed]
- Kothgassner, O.D.; Felnhofer, A. Does virtual reality help to cut the Gordian knot between ecological validity and experimental control? Ann. Int. Commun. Assoc. 2020, 44, 210–218. [Google Scholar] [CrossRef]
- Parsons, T.D. Neuropsychological Assessment Using Virtual Environments: Enhanced Assessment Technology for Improved Ecological Validity. In Advanced Computational Intelligence Paradigms in Healthcare 6. Virtual Reality in Psychotherapy, Rehabilitation, and Assessment; Brahnam, S., Jain, L.C., Eds.; Springer: Berlin/Heidelberg, Germay, 2011; pp. 271–289. [Google Scholar] [CrossRef]
- Parsons, T.D. Virtual Reality for Enhanced Ecological Validity and Experimental Control in the Clinical, Affective and Social Neurosciences. Front. Hum. Neurosci. 2015, 9, 660. [Google Scholar] [CrossRef]
- Jeung, S.; Hilton, C.; Berg, T.; Gehrke, L.; Gramann, K. Virtual Reality for Spatial Navigation. In Current Topics in Behavioral Neurosciences; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar] [CrossRef]
- Kuske, N. On the Relation between Representation and Embodiment in Spatial Cognition. Ph.D. Thesis, Universität Osnabrück, Osnabrück, Germany, 2020. [Google Scholar]
- Münzer, S.; Hölscher, C. Entwicklung und Validierung eines Fragebogens zu räumlichen Strategien. Diagnostica 2011, 57, 111–125. [Google Scholar] [CrossRef]
- Young, L.R. The current status of vestibular system models. Automatica 1969, 5, 369–383. [Google Scholar] [CrossRef]
- Nori, R.; Piccardi, L. Familiarity and spatial cognitive style: How important are they for spatial representation. In Spatial Memory: Visuospatial Processes, Cognitive Performance and Developmental Effects; Thomas, J.B., Ed.; Nova Science Publishers, Inc.: Hauppauge, NY, USA, 2011; pp. 123–144. [Google Scholar]
- van Veen, H.A.H.C.; Distler, H.K.; Braun, S.J.; Bülthoff, H.H. Navigating through a virtual city: Using virtual reality technology to study human action and perception. Future Gener. Comput. Syst. 1998, 14, 231–242. [Google Scholar] [CrossRef]
- Sunesson, K.; Allwood, C.M.; Paulin, D.; Heldal, I.; Roupe, M.; Johansson, M.; Westerdahl, B. Virtual reality as a new tool in the city planning process. Tsinghua Sci. Technol. 2008, 13, 255–260. [Google Scholar] [CrossRef]
- Huffman, D.J.; Ekstrom, A.D. A Modality-Independent Network Underlies the Retrieval of Large-Scale Spatial Environments in the Human Brain. Neuron 2019, 104, 611–622.e7. [Google Scholar] [CrossRef]
- Nezami, F.N.; Wächter, M.A.; Pipa, G.; König, P. Project Westdrive: Unity City With Self-Driving Cars and Pedestrians for Virtual Reality Studies. Front. ICT 2020, 7, 1. [Google Scholar] [CrossRef]
- Wehden, L.O.; Reer, F.; Janzik, R.; Tang, W.Y.; Quandt, T. The slippery path to total presence: How omnidirectional virtual reality treadmills influence the gaming experience. Media Commun. 2021, 9, 5–16. [Google Scholar] [CrossRef]
- Ruddle, R.A.; Volkova, E.; Bülthoff, H.H. Learning to walk in virtual reality. ACM Trans. Appl. Percept. 2013, 10, 1–17. [Google Scholar] [CrossRef]
- Hancock, P.A.; Newell, K.M. The Movement Speed-Accuracy Relationship in Space-Time. In Motor Behavior: Programming, Control, and Acquisition; Heuer, H., Kleinbeck, U., Schmidt, K.H., Eds.; Springer: Berlin/Heidelberg, Germany, 1985; pp. 153–188. [Google Scholar] [CrossRef]
- Fullerton, G.S.; Cattell, J.M.K. On the Perception of Small Differences: With Special Reference to the Extent, Force and Time of Movement; University of Pennsylvania Press: Pennsylvania, PA, USA, 1892; Volume 2. [Google Scholar]
- Woodworth, R.S. Accuracy of voluntary movement. Psychol. Rev. Monogr. Suppl. 1899, 3. [Google Scholar] [CrossRef]
- Browning, R.C.; Baker, E.A.; Herron, J.A.; Kram, R. Effects of obesity and sex on the energetic cost and preferred speed of walking. J. Appl. Physiol. 2006, 100, 390–398. [Google Scholar] [CrossRef] [PubMed]
- Mohler, B.J.; Thompson, W.B.; Creem-Regehr, S.H.; Pick, H.L., Jr.; Warren, W.H., Jr. Visual flow influences gait transition speed and preferred walking speed. Exp. Brain Res. 2007, 181, 221–228. [Google Scholar] [CrossRef] [PubMed]
- Levine, R.V.; Norenzayan, A. The pace of life in 31 countries. J. Cross. Cult. Psychol. 1999, 30, 178–205. [Google Scholar] [CrossRef]
- Bornstein, M.H.; Bornstein, H.G. The pace of life. Nature 1976, 259, 557–559. [Google Scholar] [CrossRef]
- Bornstein, M.H. The pace of life: Revisited. Int. J. Psychol. 1979, 14, 83–90. [Google Scholar] [CrossRef]
- Chardonnet, J.R.; Mirzaei, M.A.; Mérienne, F. Features of the Postural Sway Signal as Indicators to Estimate and Predict Visually Induced Motion Sickness in Virtual Reality. Int. J.-Hum.-Comput. Interact. 2017, 33, 771–785. [Google Scholar] [CrossRef]
- Chalmers, A.; Debattista, K.; Ramic-Brkic, B. Towards high-fidelity multi-sensory virtual environments. Vis. Comput. 2009, 25, 1101. [Google Scholar] [CrossRef]
- Tomono, A.; Kanda, K.; Otake, S. Effect of smell presentation on individuals with regard to eye catching and memory. Electron. Commun. Jpn. 2011, 94, 9–19. [Google Scholar] [CrossRef]
- Tortell, R.; Luigi, D.P.; Dozois, A.; Bouchard, S.; Morie, J.F.; Ilan, D. The effects of scent and game play experience on memory of a virtual environment. Virtual Real. 2007, 11, 61–68. [Google Scholar] [CrossRef]
- Baus, O.; Bouchard, S. Exposure to an unpleasant odour increases the sense of Presence in virtual reality. Virtual Real. 2017, 21, 59–74. [Google Scholar] [CrossRef]
- Wallentin, M.; Roepstorff, A.; Burgess, N. Frontal eye fields involved in shifting frame of reference within working memory for scenes. Neuropsychologia 2008, 46, 399–408. [Google Scholar] [CrossRef] [PubMed]
- Lakens, D. Calculating and reporting effect sizes to facilitate cumulative science: A practical primer for t-tests and ANOVAs. Front. Psychol. 2013, 4, 863. [Google Scholar] [CrossRef]
- Misra, S. Randomized double blind placebo control studies, the “Gold Standard” in intervention based studies. Indian J. Sex. Transm. Dis. Aids 2012, 33, 131–134. [Google Scholar] [CrossRef]
- Meilinger, T. Strategies of Orientation in Environmental Spaces; Logos Verlag Berlin GmbH: Berlin, Germany, 2007. [Google Scholar]
- Moeser, S.D. Cognitive Mapping in a Complex Building. Environ. Behav. 1988, 20, 21–49. [Google Scholar] [CrossRef]
- Wen, W.; Ishikawa, T.; Sato, T. Individual differences in the encoding processes of egocentric and allocentric survey knowledge. Cogn. Sci. 2013, 37, 176–192. [Google Scholar] [CrossRef]
- Berry, P.L.J.; Bell, S. Pointing accuracy: Does individual pointing accuracy differ for indoor vs. outdoor locations? J. Environ. Psychol. 2014, 38, 175–185. [Google Scholar] [CrossRef]
- Colle, H.A.; Reid, G.B. The Room Effect: Metric Spatial Knowledge of Local and Separated Regions. Presence 1998, 7, 116–128. [Google Scholar] [CrossRef]
- Coluccia, E.; Bosco, A.; Brandimonte, M.A. The role of visuo-spatial working memory in map learning: New findings from a map drawing paradigm. Psychol. Res. 2007, 71, 359–372. [Google Scholar] [CrossRef]
- Coluccia, E.; Iosue, G.; Antonella, B.M. The relationship between map drawing and spatial orientation abilities: A study of gender differences. J. Environ. Psychol. 2007, 27, 135–144. [Google Scholar] [CrossRef]
- Goldin, S.E.; Thorndyke, P.W. Simulating Navigation for Spatial Knowledge Acquisition. Hum. Factors 1982, 24, 457–471. [Google Scholar] [CrossRef]
- van Asselen, M.; Fritschy, E.; Postma, A. The influence of intentional and incidental learning on acquiring spatial knowledge during navigation. Psychol. Res. 2006, 70, 151–156. [Google Scholar] [CrossRef] [PubMed]
- Shelton, A.L.; Gabrieli, J.D.E. Neural correlates of encoding space from route and survey perspectives. J. Neurosci. 2002, 22, 2711–2717. [Google Scholar] [CrossRef] [PubMed]
- Hegarty, M.; Montello, D.R.; Richardson, A.E.; Ishikawa, T.; Lovelace, K. Spatial abilities at different scales: Individual differences in aptitude-test performance and spatial-layout learning. Intelligence 2006, 34, 151–176. [Google Scholar] [CrossRef]
- Chrastil, E.R.; Warren, W.H. Active and passive spatial learning in human navigation: Acquisition of survey knowledge. J. Exp. Psychol. Learn. Mem. Cogn. 2013, 39, 1520–1537. [Google Scholar] [CrossRef] [PubMed]
- Witmer, B.G.; Sadowski, W.J.; Finkelstein, N.M. VE-Based Training Strategies for Acquiring Survey Knowledge. Presence 2002, 11, 1–18. [Google Scholar] [CrossRef]
- Tolman, E.C. Cognitive maps in rats and men. Psychol. Rev. 1948, 55, 189–208. [Google Scholar] [CrossRef]
- Golledge, R.G. Wayfinding Behavior: Cognitive Mapping and Other Spatial Processes; JHU Press: Baltimore, MD, USA, 1999. [Google Scholar]
- Meilinger, T.; Rebane, J.; Henson, A.; Bülthoff, H.H.; Mallot, H.A. Space and situated cognition. In Proceedings of the Sixth International Conference on Spatial Cognition, Rome, Italy, 7–11 September 2015; Springer Science and Business Media LLC: Berlin, Germany, 2015; Volume 16, pp. 1–113. [Google Scholar] [CrossRef]
- Stevens, A.; Coupe, P. Distortions in judged spatial relations. Cogn. Psychol. 1978, 10, 422–437. [Google Scholar] [CrossRef]
- Montello, D.R.; Goodchild, M.F.; Gottsegen, J.; Fohl, P. Where’s downtown?: Behavioral methods for determining referents of vague spatial queries. In Spatial Cognition and Computation; Psychology Press: London, UK, 2017; pp. 185–204. [Google Scholar]
- Kozlowski, L.T.; Bryant, K.J. Sense of direction, spatial orientation, and cognitive maps. J. Exp. Psychol. Hum. Percept. Perform. 1977, 3, 590–598. [Google Scholar] [CrossRef]
- Wiener, J.M.; Büchner, S.J.; Hölscher, C. Taxonomy of Human Wayfinding Tasks: A Knowledge-Based Approach. Spat. Cogn. Comput. 2009, 9, 152–165. [Google Scholar] [CrossRef]
- He, Q.; McNamara, T.P.; Bodenheimer, B.; Klippel, A. Acquisition and transfer of spatial knowledge during wayfinding. J. Exp. Psychol. Learn. Mem. Cogn. 2019, 45, 1364–1386. [Google Scholar] [CrossRef] [PubMed]
- Myowa-Yamakoshi, M.; Takeshita, H. Do Human Fetuses Anticipate Self-Oriented Actions? A Study by Four-Dimensional (4D) Ultrasonography. Infancy 2006, 10, 289–301. [Google Scholar] [CrossRef]
- DeCasper, A.J.; Spence, M.J. Prenatal maternal speech influences newborns’ perception of speech sounds. Infant Behav. Dev. 1986, 9, 133–150. [Google Scholar] [CrossRef]
- Rovee, C.K.; Rovee, D.T. Conjugate reinforcement of infant exploratory behavior. J. Exp. Child Psychol. 1969, 8, 33–39. [Google Scholar] [CrossRef] [PubMed]
- Bao, T.; Carender, W.J.; Kinnaird, C.; Barone, V.J.; Peethambaran, G.; Whitney, S.L.; Kabeto, M.; Seidler, R.D.; Sienko, K.H. Effects of long-term balance training with vibrotactile sensory augmentation among community-dwelling healthy older adults: A randomized preliminary study. J. Neuroeng. Rehabil. 2018, 15, 5. [Google Scholar] [CrossRef]
- Stiles, N.R.B.; Shimojo, S. Auditory Sensory Substitution is Intuitive and Automatic with Texture Stimuli. Sci. Rep. 2015, 5, 15628. [Google Scholar] [CrossRef]
- Dey, N.; Paul, A.; Ghosh, P.; Mukherjee, C.; De, R.; Dey, S. Ultrasonic Sensor Based Smart Blind Stick. In Proceedings of the 2018 International Conference on Current Trends towards Converging Technologies (ICCTCT), Coimbatore, India, 1–3 March 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Chebat, D.R.; Schneider, F.C.; Kupers, R.; Ptito, M. Navigation with a sensory substitution device in congenitally blind individuals. Neuroreport 2011, 22, 342–347. [Google Scholar] [CrossRef]
- Eagleman, D. Plenary talks: A vibrotactile sensory substitution device for the deaf and profoundly hearing impaired. In Proceedings of the 2014 IEEE Haptics Symposium (HAPTICS), Houston, TX, USA, 23–26 February 2014; p. xvii. [Google Scholar] [CrossRef]
- Petry, B.; Illandara, T.; Elvitigala, D.S.; Nanayakkara, S. Supporting Rhythm Activities of Deaf Children using Music-Sensory-Substitution Systems. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Loomis, J.M.; Klatzky, R. Functional equivalence of spatial representations from vision, touch, and hearing: Relevance for sensory substitution. In Blindness and Brain Plasticity in Navigation and Object Perception; Rieser, J.J., Ashmead, D.H., Ebner, F., Corn, A.L., Eds.; Taylorfrancis: New York, NY, USA, 2007; Volume 1, pp. 167–196. [Google Scholar] [CrossRef]
- Perruchoud, D.; Pisotta, I.; Carda, S.; Murray, M.M.; Ionta, S. Biomimetic rehabilitation engineering: The importance of somatosensory feedback for brain–machine interfaces. J. Neural Eng. 2016, 13, 041001. [Google Scholar] [CrossRef]
- Chebat, D.R.; Maidenbaum, S.; Amedi, A. Navigation using sensory substitution in real and virtual mazes. PLoS ONE 2015, 10, e0126307. [Google Scholar] [CrossRef]
- Maimon, A.; Wald, I.Y.; Oz, M.B.; Codron, S.; Netzer, O.; Heimler, B.; Amedi, A. The Topo-Speech sensory substitution system as a method of conveying spatial information to the blind and vision impaired. Front. Hum. Neurosci. 2023, 16. [Google Scholar] [CrossRef] [PubMed]
- Hoskins, R.; Wang, J.; Cao, C.G.L. Use of stochastic resonance methods for improving laparoscopic surgery performance. Surg. Endosc. 2016, 30, 4214–4219. [Google Scholar] [CrossRef]
- Charness, G.; Gneezy, U.; Kuhn, M.A. Experimental methods: Between-subject and within-subject design. J. Econ. Behav. Organ. 2012, 81, 1–8. [Google Scholar] [CrossRef]
- So, R.H.; Lo, W.T.; Ho, A.T. Effects of navigation speed on motion sickness caused by an immersive virtual environment. Hum. Factors 2001, 43, 452–461. [Google Scholar] [CrossRef]
- Schimpl, M.; Moore, C.; Lederer, C.; Neuhaus, A.; Sambrook, J.; Danesh, J.; Ouwehand, W.; Daumer, M. Association between walking speed and age in healthy, free-living individuals using mobile accelerometry—A cross-sectional study. PLoS ONE 2011, 6, e23299. [Google Scholar] [CrossRef] [PubMed]
- Mackin, A.; Zhang, F.; Bull, D.R. A study of subjective video quality at various frame rates. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 3407–3411. [Google Scholar] [CrossRef]
- Vive Pro Eye Headset Specs. 2017. Available online: https://www.vive.com/us/product/vive-pro-eye/specs/ (accessed on 9 December 2022).
- Schmidt, V.; König, S.U.; Dilawar, R.; Sanchez Pacheco, T.; König, P. Improved Spatial Knowledge Acquisition through Sensory Augmentation: Data, Scripts, Documentation, and Experiment Materials. 2023. Available online: https://osf.io/32sqe/ (accessed on 28 February 2022).









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schmidt, V.; König, S.U.; Dilawar, R.; Sánchez Pacheco, T.; König, P. Improved Spatial Knowledge Acquisition through Sensory Augmentation. Brain Sci. 2023, 13, 720. https://doi.org/10.3390/brainsci13050720
Schmidt V, König SU, Dilawar R, Sánchez Pacheco T, König P. Improved Spatial Knowledge Acquisition through Sensory Augmentation. Brain Sciences. 2023; 13(5):720. https://doi.org/10.3390/brainsci13050720
Chicago/Turabian StyleSchmidt, Vincent, Sabine U. König, Rabia Dilawar, Tracy Sánchez Pacheco, and Peter König. 2023. "Improved Spatial Knowledge Acquisition through Sensory Augmentation" Brain Sciences 13, no. 5: 720. https://doi.org/10.3390/brainsci13050720
APA StyleSchmidt, V., König, S. U., Dilawar, R., Sánchez Pacheco, T., & König, P. (2023). Improved Spatial Knowledge Acquisition through Sensory Augmentation. Brain Sciences, 13(5), 720. https://doi.org/10.3390/brainsci13050720