Modeling the Dynamic Response of Plant Growth to Root Zone Temperature in Hydroponic Chili Pepper Plant Using Neural Networks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
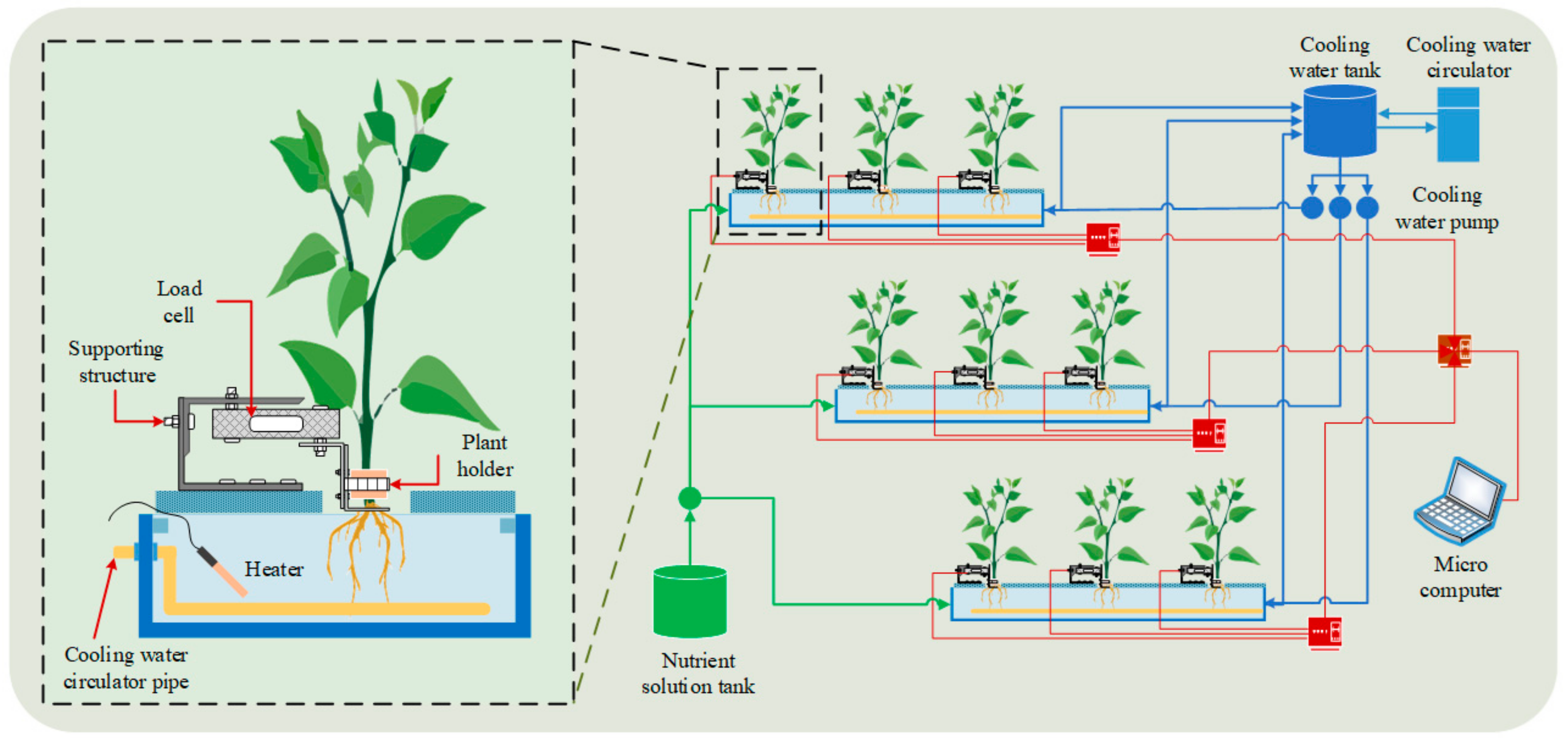
2.1. Plant Materials
2.2. Experimental Design
2.3. Measurement of Plant Growth
2.4. System Identification Method
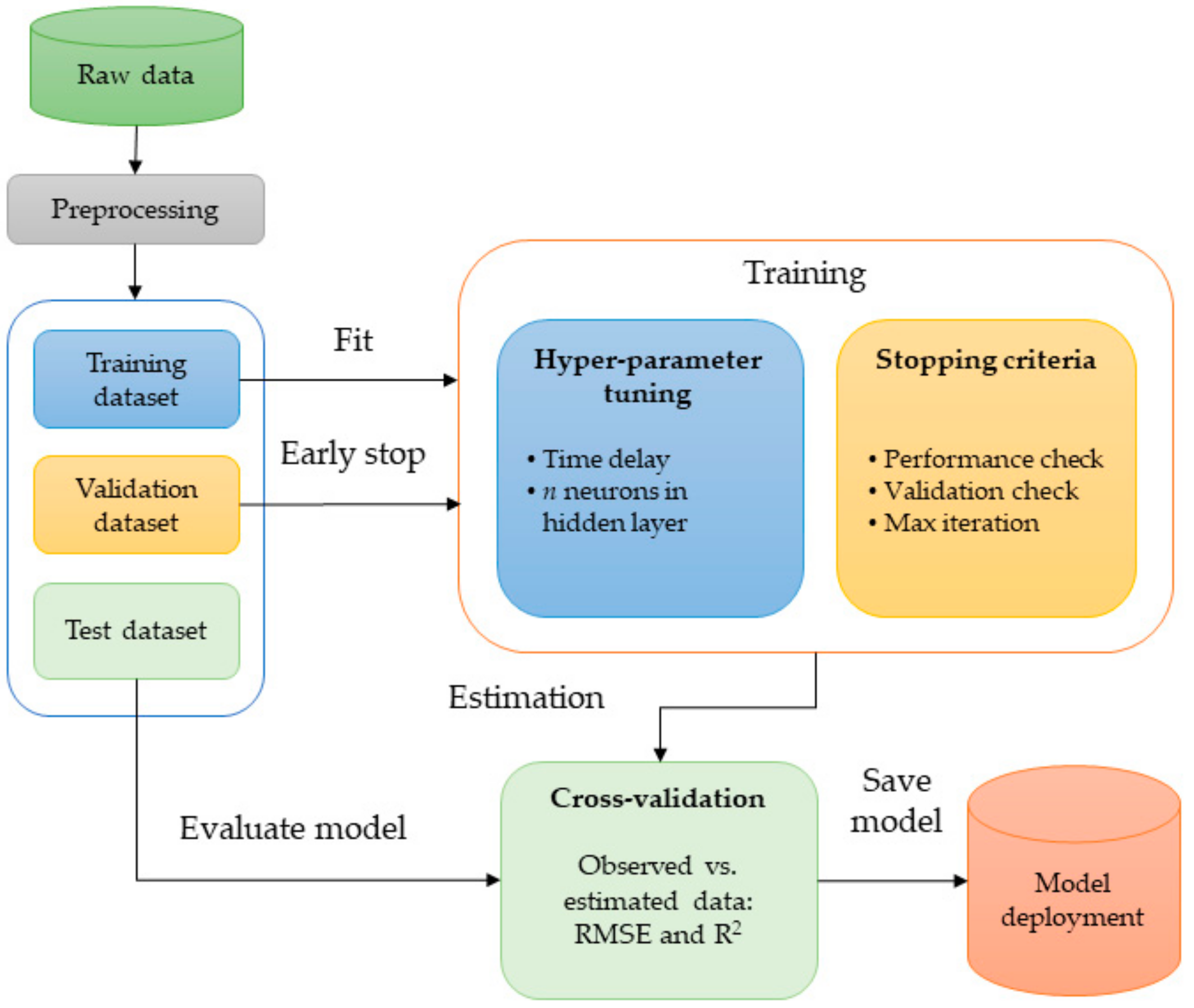
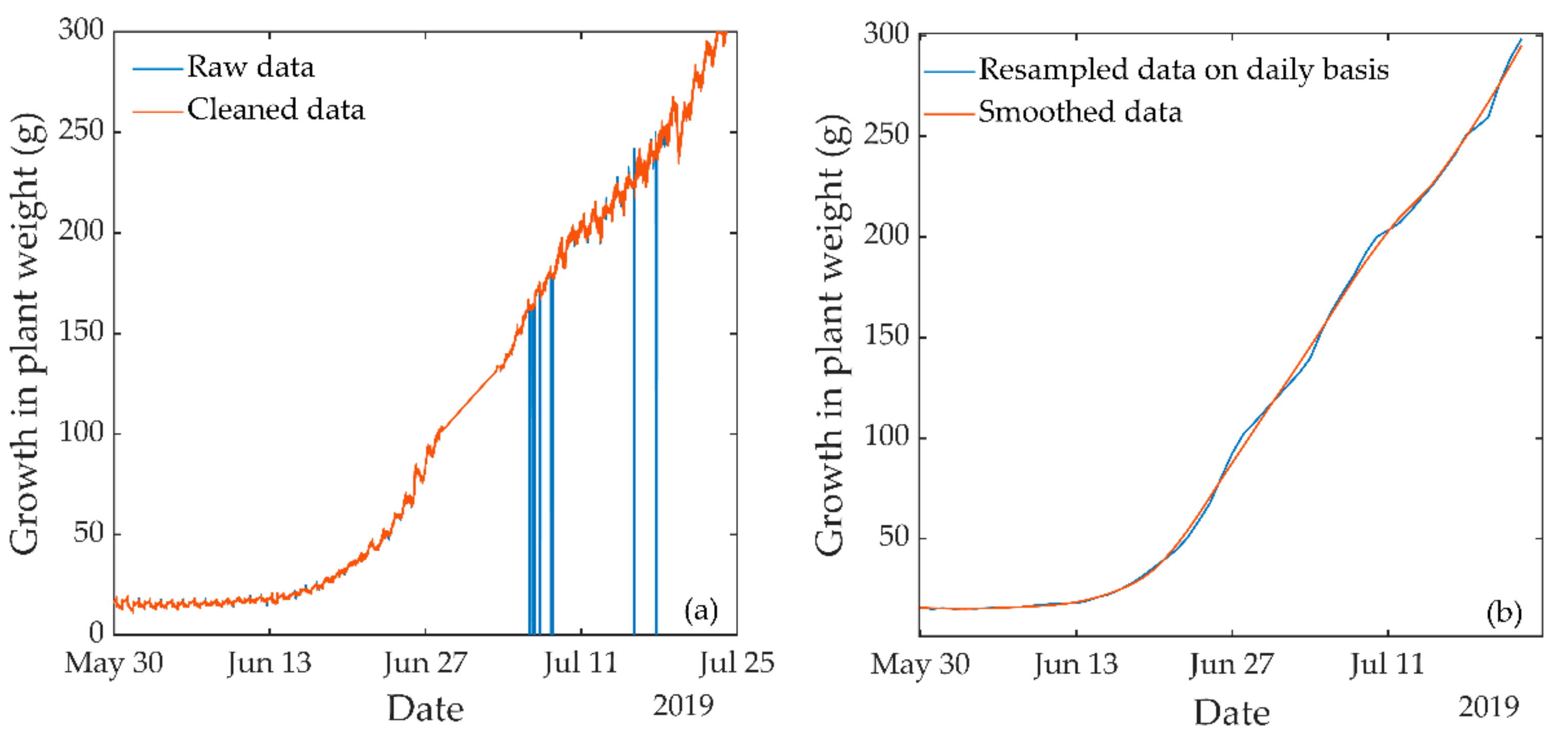
2.4.1. Data Preprocessing
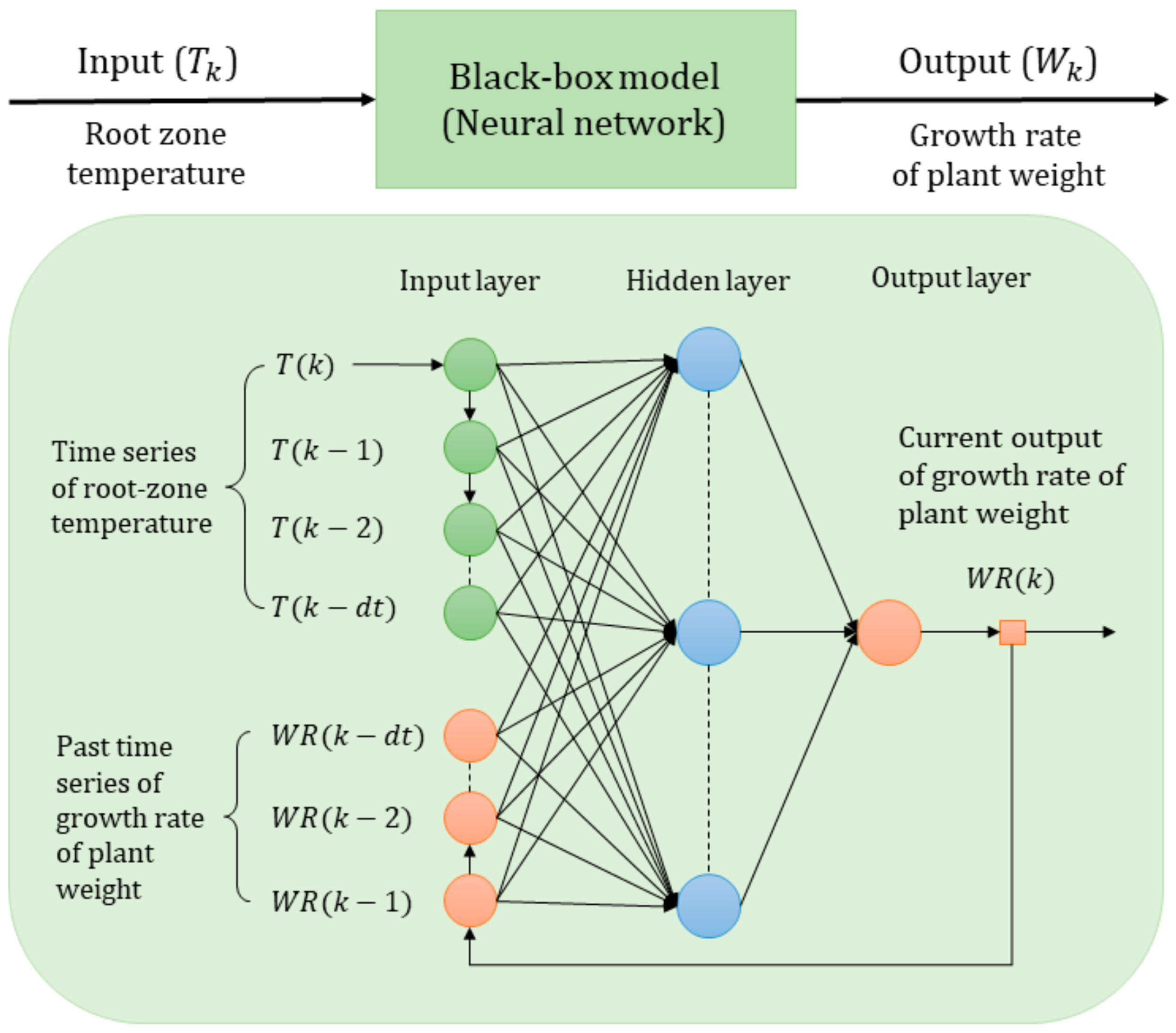
2.4.2. Dynamic Neural Networks for System Identification
2.4.3. Model Validation and Model Structure Selection
2.4.4. Model Performance
3. Results
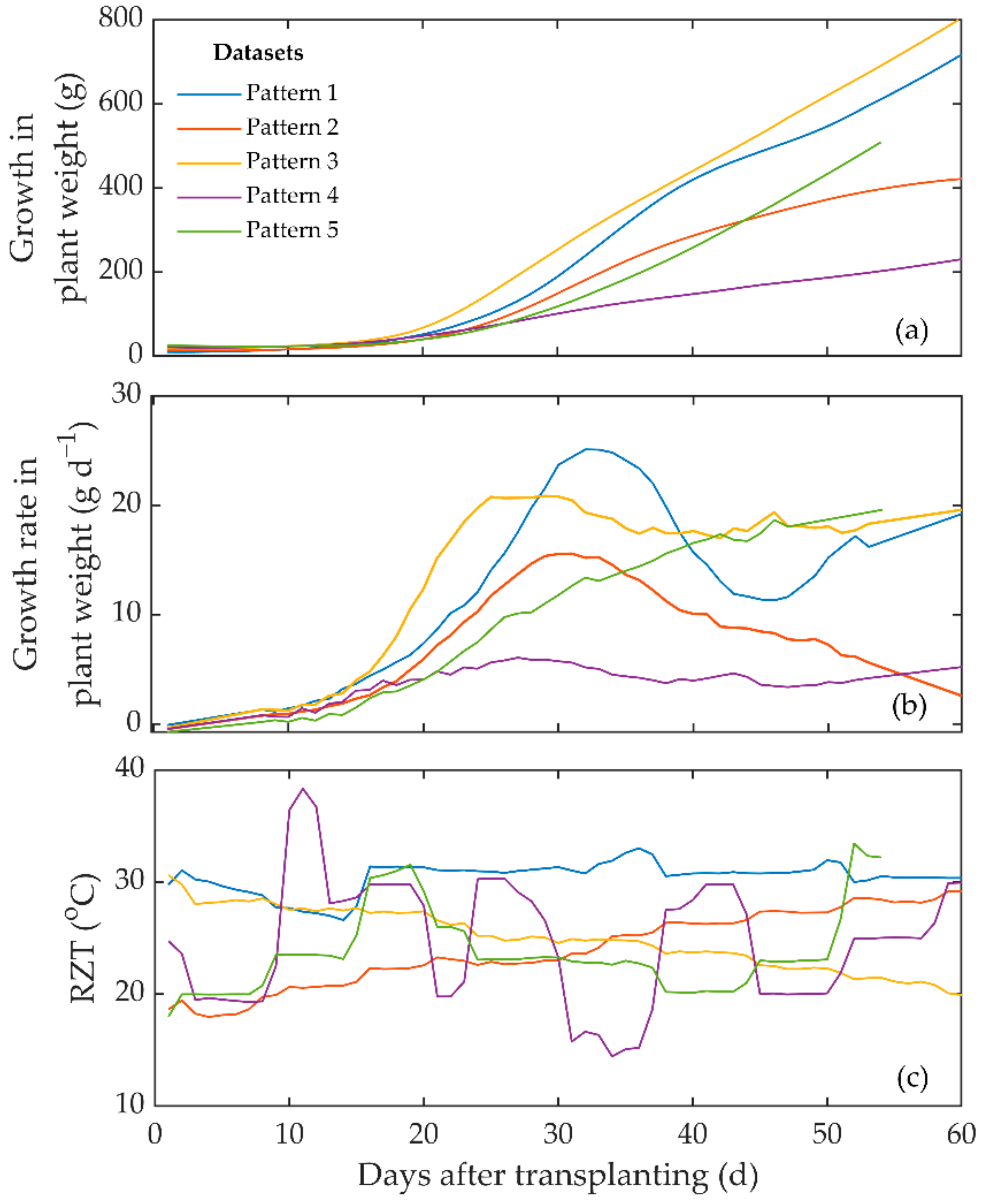
3.1. The Response of Plant Growth to Root Zone Temperature (RZT) for Identification
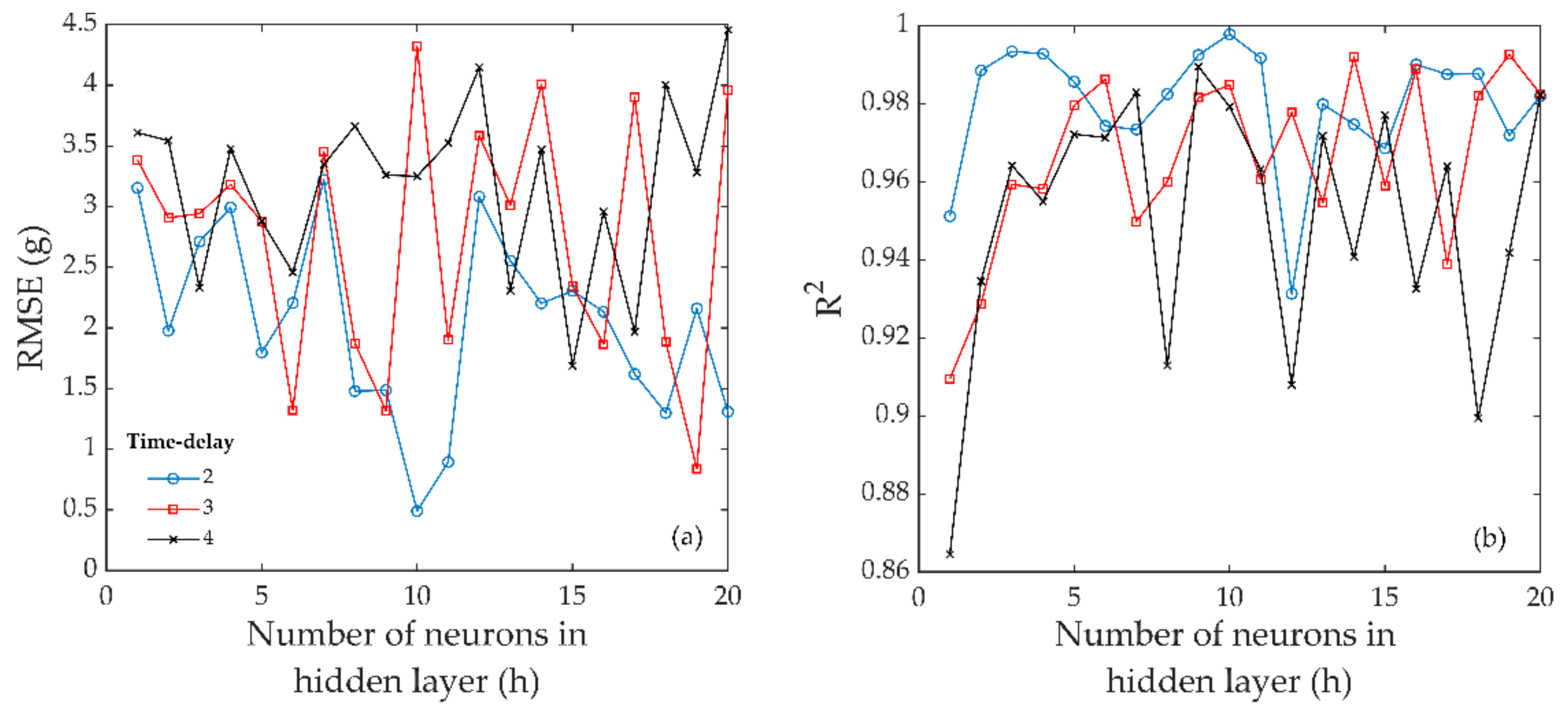
3.2. Determination of the Model Structure
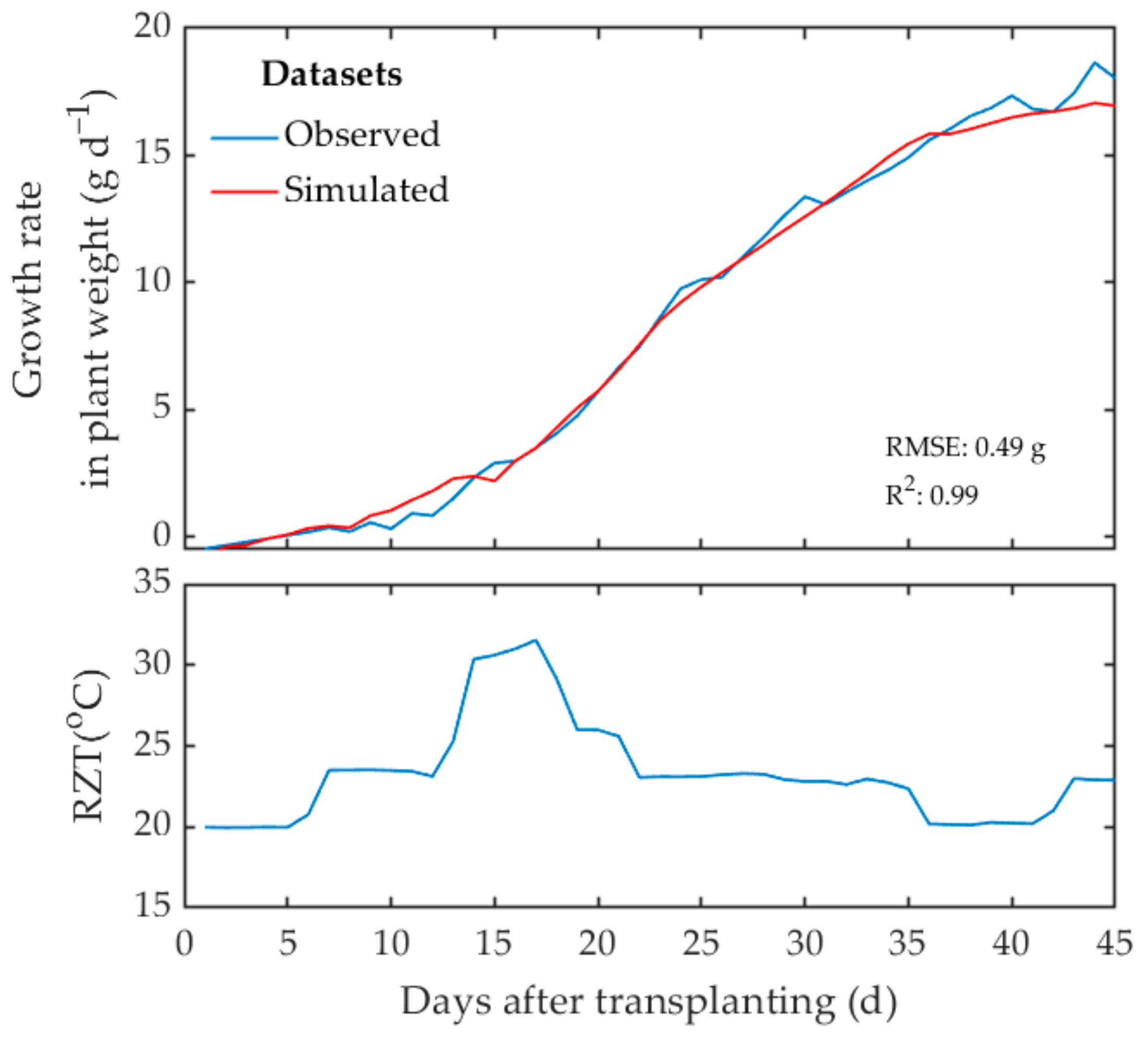
3.3. Identification Results
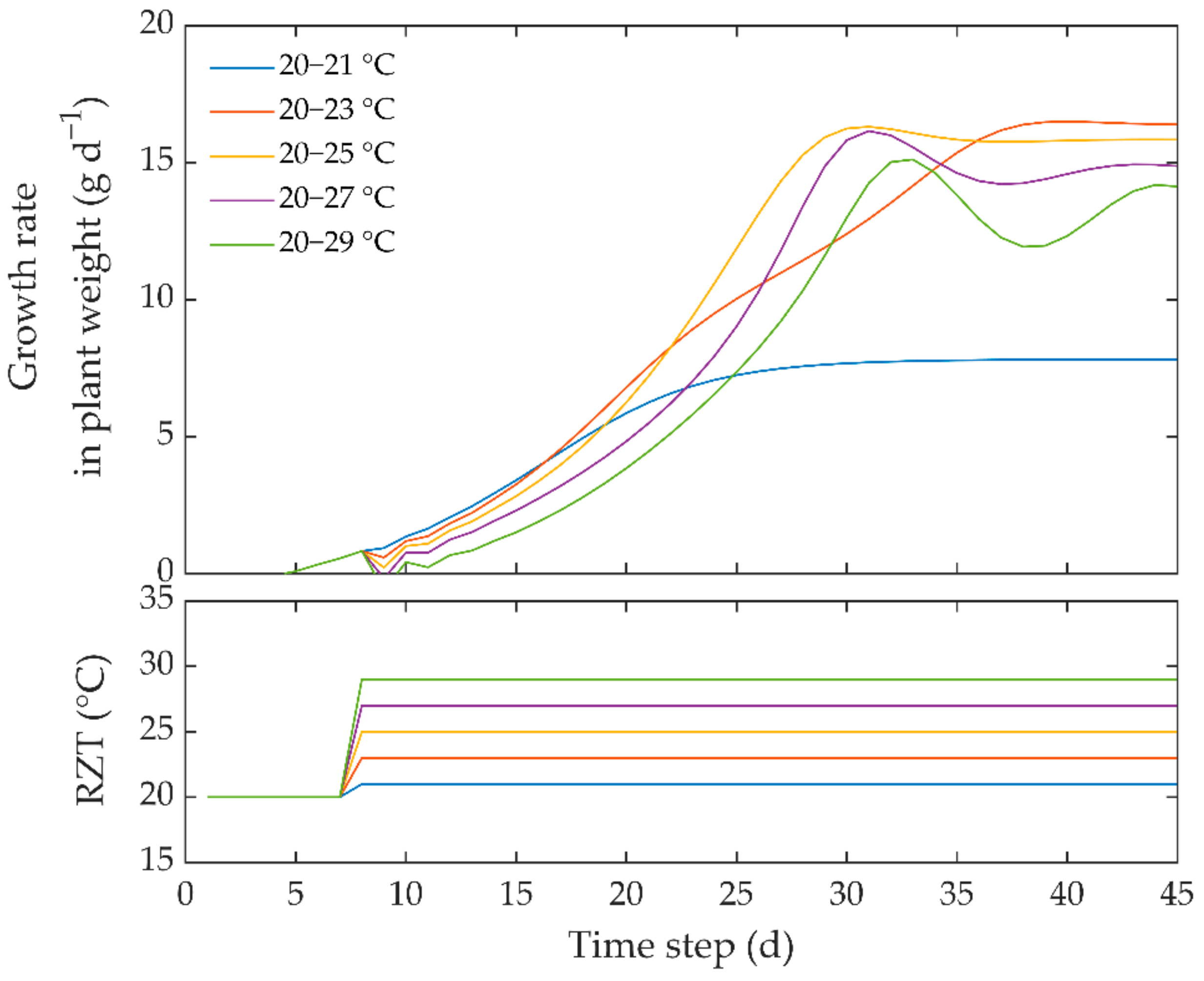
3.4. Estimation of the Characteristics of Plant Response
3.5. Estimation of the Relationship between RZT and the Growth Rate of Plant Weight
4. Discussion and Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Sambo, P.; Nicoletto, C.; Giro, A.; Pii, Y.; Valentinuzzi, F.; Mimmo, T.; Lugli, P.; Orzes, G.; Mazzetto, F.; Astolfi, S.; et al. Hydroponic Solutions for Soilless Production Systems: Issues and Opportunities in a Smart Agriculture Perspective. Front. Plant Sci. 2019, 10, 923. [Google Scholar] [CrossRef] [PubMed]
- He, J. Root Growth, Morphological and Physiological Characteristics of Subtropical and Temperate Vegetable Crops Grown in the Tropics Under Different Root-Zone Temperature. In Plant Growth; Rigobelo, E.C., Ed.; IntechOpen: London, UK, 2016; pp. 131–148. [Google Scholar]
- Mortensen, L.M. Growth Responses of Some Greenhouse Plants to Environment. II. The Effect of Soil Temperature on Chrysanthemum Morifolium Ramat. Sci. Hortic. (Amsterdam) 1982, 16, 47–55. [Google Scholar] [CrossRef]
- Gosselin, A.; Trudel, M.J. Interactions between Air and Root Temperatures on Greenhouse Tomato: II. Mineral Composition of Plants. J. Amer. Soc. Hort. Sci. 1983, 108, 905–909. [Google Scholar]
- Ingram, D.L.; Ruter, J.M.; Martin, C.A. Review: Characterization and Impact of Supraoptimal Root-Zone Temperatures in Container-Grown Plants. HortScience 2015, 50, 530–539. [Google Scholar] [CrossRef] [Green Version]
- Kawasaki, Y.; Matsuo, S.; Suzuki, K.; Kanayama, Y.; Kanahama, K. Root-Zone Cooling at High Air Temperatures Enhances Physiological Activities and Internal Structures of Roots in Young Tomato Plants. J. Jpn. Soc. Hortic. Sci. 2013, 82, 322–327. [Google Scholar] [CrossRef] [Green Version]
- Kawasaki, Y.; Matsuo, S.; Kanayama, Y.; Kanahama, K. Effect of Root-Zone Heating on Root Growth and Activity, Nutrient Uptake, and Fruit Yield of Tomato at Low Air Temperatures. J. Jpn. Soc. Hortic. Sci. 2014, 83, 295–301. [Google Scholar] [CrossRef] [Green Version]
- Morimoto, T.; Hashimoto, Y.; Fukuyama, T. Identification and Control of Hydroponic System in Greenhouses. IFAC Proc. Vol. 1985, 18, 1689–1693. [Google Scholar] [CrossRef]
- Morimoto, T.; Hashimoto, Y. Speaking Plant/Fruit Approach for Greenhouses and Plant Factories. Environ. Control. Biol. 2009, 47, 55–72. [Google Scholar] [CrossRef]
- Hashimoto, Y. Recent Strategies of Optimal Growth Regulation By the Speaking Plant Concept. Acta Hortic. 1989, 260, 115–122. [Google Scholar] [CrossRef]
- Morimoto, T.; Hatou, K.; Hashimoto, Y. Intelligent Control for a Plant Production System. Control. Eng. Pract. 1996, 4, 773–784. [Google Scholar] [CrossRef]
- Nishina, H. Development of Speaking Plant Approach Technique for Intelligent Greenhouse. Agric. Agric. Sci. Procedia 2015, 3, 9–13. [Google Scholar] [CrossRef] [Green Version]
- Morimoto, T.; Hashimoto, Y. An Intelligent Control for Greenhouse Automation, Oriented by the Concepts of SPA and SFA—An Application to a Post-Harvest Process. Comput. Electron. Agric. 2000, 29, 3–20. [Google Scholar] [CrossRef]
- Morimoto, T.; Hashimoto, Y. AI Approaches to Identification and Control of Total Plant Production Systems. Control. Eng. Pract. 2000, 8, 555–567. [Google Scholar] [CrossRef]
- Fasol, K.H.; Jörgl, H.P. Principles of Model Building and Identification. Automatica 1980, 16, 505–518. [Google Scholar] [CrossRef]
- Yumeina, D.; Morimoto, T. Dynamic Optimization of Solution Nutrient Concentration to Promote the Initial Growth of Tomato Plants in Hydroponics. Environ. Control. Biol. 2014, 52, 87–94. [Google Scholar] [CrossRef] [Green Version]
- Morimoto, T.; Takeuchi, T.; Hashimoto, Y. Growth Optimization of Plant by Means of the Hybrid System of Genetic Algorithm and Neural Network. In Proceedings of the 1993 International Conference on Neural Networks, Nagoya, Japan, 25–29 October 1993; IEEE: Piscataway, NJ, USA, 1993; Volume 3, pp. 2979–2982. [Google Scholar]
- Yumeina, D.; Aji, G.K.; Morimoto, T. Dynamic Optimization of Water Temperature for Maximizing Leaf Water Content of Tomato in Hydroponics Using an Intelligent Control Technique. Acta Hortic. 2017, 1154, 55–64. [Google Scholar] [CrossRef]
- Isermann, R.; Münchhof, M. Identification of Dynamic Systems: An Introduction with Applications, 1st ed.; Springer-Verlag: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Whittaker, A.D.; Thieme, R.H. Editorial: Integration of Knowledge Systems into Agricultural Problem Solving. Comput. Electron. Agric. 1990, 4, 271–273. [Google Scholar] [CrossRef]
- Yin, X.; Laar, H.H. Van. Crop. Systems Dynamics: An. Ecophysiological Simulation Model. for Genotype-by-Environment Interactions, 1st ed.; Wageningen Academic Publishers: Wageningen, The Netherlands, 2005. [Google Scholar]
- Carson, E.; Feng, D.D.; Pons, M.N.; Soncini-Sessa, R.; van Straten, G. Dealing with Bio- and Ecological Complexity: Challenges and Opportunities. Annu. Rev. Control. 2006, 30, 91–101. [Google Scholar] [CrossRef]
- Isermann, R.; Ernst, S.; Nelles, O. Identification with Dynamic Neural Networks—Architectures, Comparisons, Applications. IFAC Proc. Vol. 1997, 30, 947–972. [Google Scholar] [CrossRef]
- Hinton, G.E. How Neural Networks Learn from Experience. Sci. Am. 1992, 267, 144–151. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning Internal Representations by Error Propagation. In Readings in Cognitive Science: A Perspective from Psychology and Artificial Intelligence; Morgan Kaufmann Publishers, Inc.: San Mateo, CA, USA, 1988; pp. 399–421. [Google Scholar]
- Sablani, S.S.; Datta, A.K.; Rahman, M.S.; Mujumdar, A.S. Handbook of Food and Bioprocess. Modeling Techniques; Sablani, S., Datta, A., Shafiur Rehman, M., Mujumdar, A., Eds.; CRC Press: Boca Raton, FL, USA, 2006; Volume 20065751. [Google Scholar]
- Liakos, K.G.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine Learning in Agriculture: A Review. Sensors 2018, 18, 2674. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Islam, M.P.; Morimoto, T.; Hatou, K. Dynamic Optimization of inside Temperature of Zero Energy Cool Chamber for Storing Fruits and Vegetables Using Neural Networks and Genetic Algorithms. Comput. Electron. Agric. 2013, 95, 98–107. [Google Scholar] [CrossRef]
- FAO. Good Agricultural Practices for Greenhouse Vegetable Production in the South. East. European Countries; FAO: Rome, Italy, 2017. [Google Scholar]
- Erickson, A.N.; Markhart, A.H. Flower Developmental Stage and Organ Sensitivity of Bell Pepper (Capsicum annuum L.) to Elevated Temperature. Plant. Cell Environ. 2002, 25, 123–130. [Google Scholar] [CrossRef]
- Pressman, E.; Shaked, R.; Firon, N. Exposing Pepper Plants to High Day Temperatures Prevents the Adverse Low Night Temperature Symptoms. Physiol. Plant. 2006, 126, 618–626. [Google Scholar] [CrossRef]
- Bosland, P.W.; Votava, E.J. Introduction. In Peppers: Vegetable and spice capsicums; CABI: Wallingford, UK, 2012; pp. 1–12. [Google Scholar]
- Aloni, B.; Karni, L.; Daie, J. Effect of Heat Stress on the Growth, Root Sugars, Acid Invertase and Protein Profile of Pepper Seedlings Following Transplanting. J. Hortic. Sci. 1992, 67, 717–725. [Google Scholar] [CrossRef]
- Oda, M.; Tsuji, K. Monitoring Fresh Weight of Leaf Lettuce. Jpn. Agric. Res. Q. 1992, 25, 19–25. [Google Scholar]
- Chen, W.-T.; Yeh, Y.-H.F.; Liu, T.-Y.; Lin, T.-T. An Automated and Continuous Plant Weight Measurement System for Plant Factory. Front. Plant. Sci. 2016, 7, 392. [Google Scholar] [CrossRef] [Green Version]
- Helmer, T.; Ehret, D.L.; Bittman, S. CropAssist, an Automated System for Direct Measurement of Greenhouse Tomato Growth and Water Use. Comput. Electron. Agric. 2005, 48, 198–215. [Google Scholar] [CrossRef]
- Wong, W.K.; Guo, Z.X. Intelligent Sales Forecasting for Fashion Retailing Using Harmony Search Algorithms and Extreme Learning Machines. In Optimizing Decision Making in the Apparel Supply Chain Using Artificial Intelligence (AI); Woodhead Publishing Limited: Sawston, UK, 2013; pp. 170–195. [Google Scholar] [CrossRef]
- Davies, L.; Gather, U. The Identification of Multiple Outliers. J. Am. Stat. Assoc. 1993, 88, 782–792. [Google Scholar] [CrossRef]
- Dai, W.; Selesnick, I.; Rizzo, J.-R.; Rucker, J.; Hudson, T. A Nonlinear Generalization of the Savitzky-Golay Filter and the Quantitative Analysis of Saccades. J. Vis. 2017, 17, 10. [Google Scholar] [CrossRef]
- Siegelmann, H.T.; Horne, B.G.; Giles, C.L. Computational Capabilities of Recurrent NARX Neural Networks. IEEE Trans. Syst. Man Cybern. Part. B 1997, 27, 208–215. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Menezes, J.M.P.; Barreto, G.A. Long-Term Time Series Prediction with the NARX Network: An Empirical Evaluation. Neurocomputing 2008, 71, 3335–3343. [Google Scholar] [CrossRef]
- Mohd, N.; Aziz, N. Performance and Robustness Evaluation of Nonlinear Autoregressive with Exogenous Input Model Predictive Control in Controlling Industrial Fermentation Process. J. Clean. Prod. 2016, 136, 42–50. [Google Scholar] [CrossRef]
- Ng, B.C.; Darus, I.Z.M.; Jamaluddin, H.; Kamar, H.M. Dynamic Modelling of an Automotive Variable Speed Air Conditioning System Using Nonlinear Autoregressive Exogenous Neural Networks. Appl. Therm. Eng. 2014, 73, 1253–1267. [Google Scholar] [CrossRef]
- Chan, R.W.K.; Yuen, J.K.K.; Lee, E.W.M.; Arashpour, M. Application of Nonlinear-Autoregressive-Exogenous Model to Predict the Hysteretic Behaviour of Passive Control Systems. Eng. Struct. 2015, 85, 1–10. [Google Scholar] [CrossRef]
- Mai, C.V.; Spiridonakos, M.D.; Chatzi, E.N.; Sudret, B. Surrogate Modeling for Stochastic Dynamical Systems by Combining Nonlinear Autoregressive with Exogenous Input Models and Polynomial Chaos Expansions. Int. J. Uncertain. Quantif. 2016, 6, 313–339. [Google Scholar] [CrossRef]
- Beale, M.H.; Hagan, M.T.; Demuth, H.B. Neural Network Toolbox (TM) User’s Guide; The MathWorks, Inc.: Natick, MA, USA, 2016. [Google Scholar]
- Aji, G.K.; Hatou, K.; Morimoto, T. Matlab Program Script for Modeling the Dynamic Response of Plant Growth to Root Zone Temperature in Hydroponic Chili Pepper Plant using Neural Network. Available online: https://github.com/mradjie/narx-plant-growth. (accessed on 25 May 2020).
- Kuhn, M.; Johnson, K. Applied Predictive Modeling; Springer: New York, NY, USA, 2013. [Google Scholar]
- Díaz-Pérez, J.C. Bell Pepper (Capsicum annum L.) Grown on Plastic Film Mulches: Effects on Crop Microenvironment, Physiological Attributes, and Fruit Yield. HortScience 2010, 45, 1196–1204. [Google Scholar] [CrossRef] [Green Version]
- Gosselin, A.; Trudel, M.J. Root-Zone Temperature Effects on Pepper. J. Am. Soc. Hort. Sci. 1986, 111, 220–224. [Google Scholar]









© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aji, G.K.; Hatou, K.; Morimoto, T. Modeling the Dynamic Response of Plant Growth to Root Zone Temperature in Hydroponic Chili Pepper Plant Using Neural Networks. Agriculture 2020, 10, 234. https://doi.org/10.3390/agriculture10060234
Aji GK, Hatou K, Morimoto T. Modeling the Dynamic Response of Plant Growth to Root Zone Temperature in Hydroponic Chili Pepper Plant Using Neural Networks. Agriculture. 2020; 10(6):234. https://doi.org/10.3390/agriculture10060234
Chicago/Turabian StyleAji, Galih Kusuma, Kenji Hatou, and Tetsuo Morimoto. 2020. "Modeling the Dynamic Response of Plant Growth to Root Zone Temperature in Hydroponic Chili Pepper Plant Using Neural Networks" Agriculture 10, no. 6: 234. https://doi.org/10.3390/agriculture10060234
APA StyleAji, G. K., Hatou, K., & Morimoto, T. (2020). Modeling the Dynamic Response of Plant Growth to Root Zone Temperature in Hydroponic Chili Pepper Plant Using Neural Networks. Agriculture, 10(6), 234. https://doi.org/10.3390/agriculture10060234