


Design and Testing of a Self-Propelled Dandelion Seed Harvester

Abstract
:1. Introduction
2. The Structure and Working Mechanism
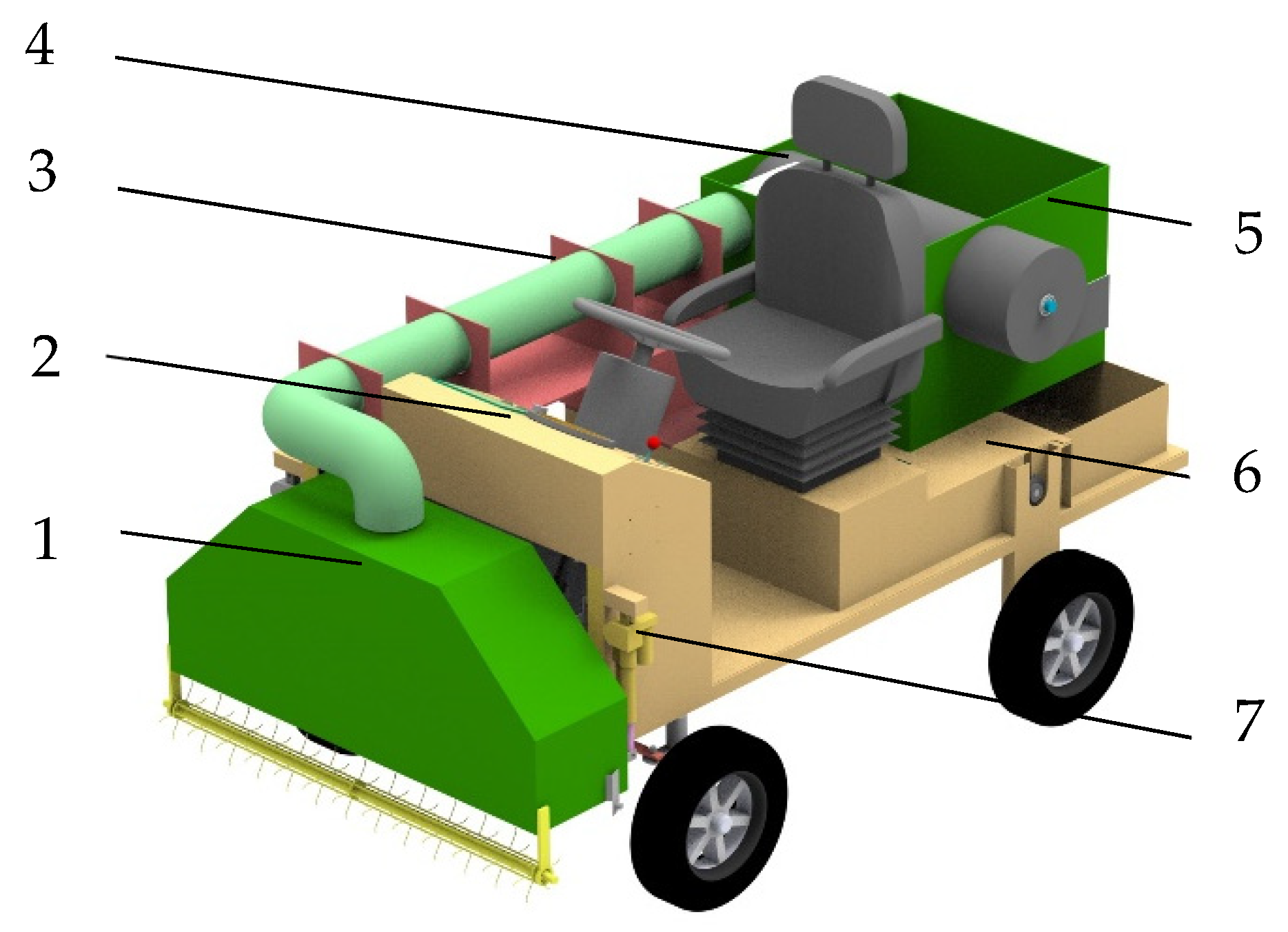
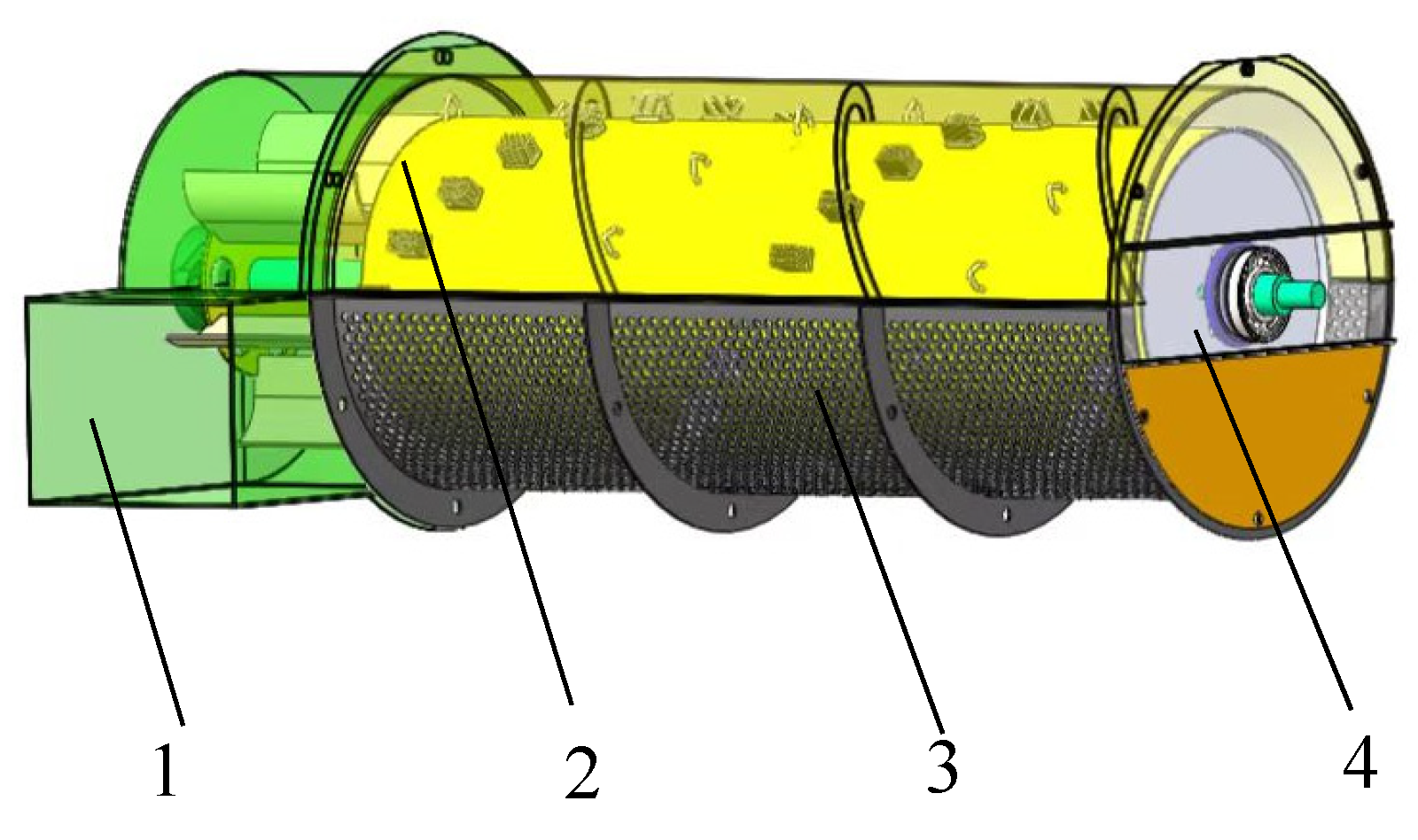
2.1. The Structure
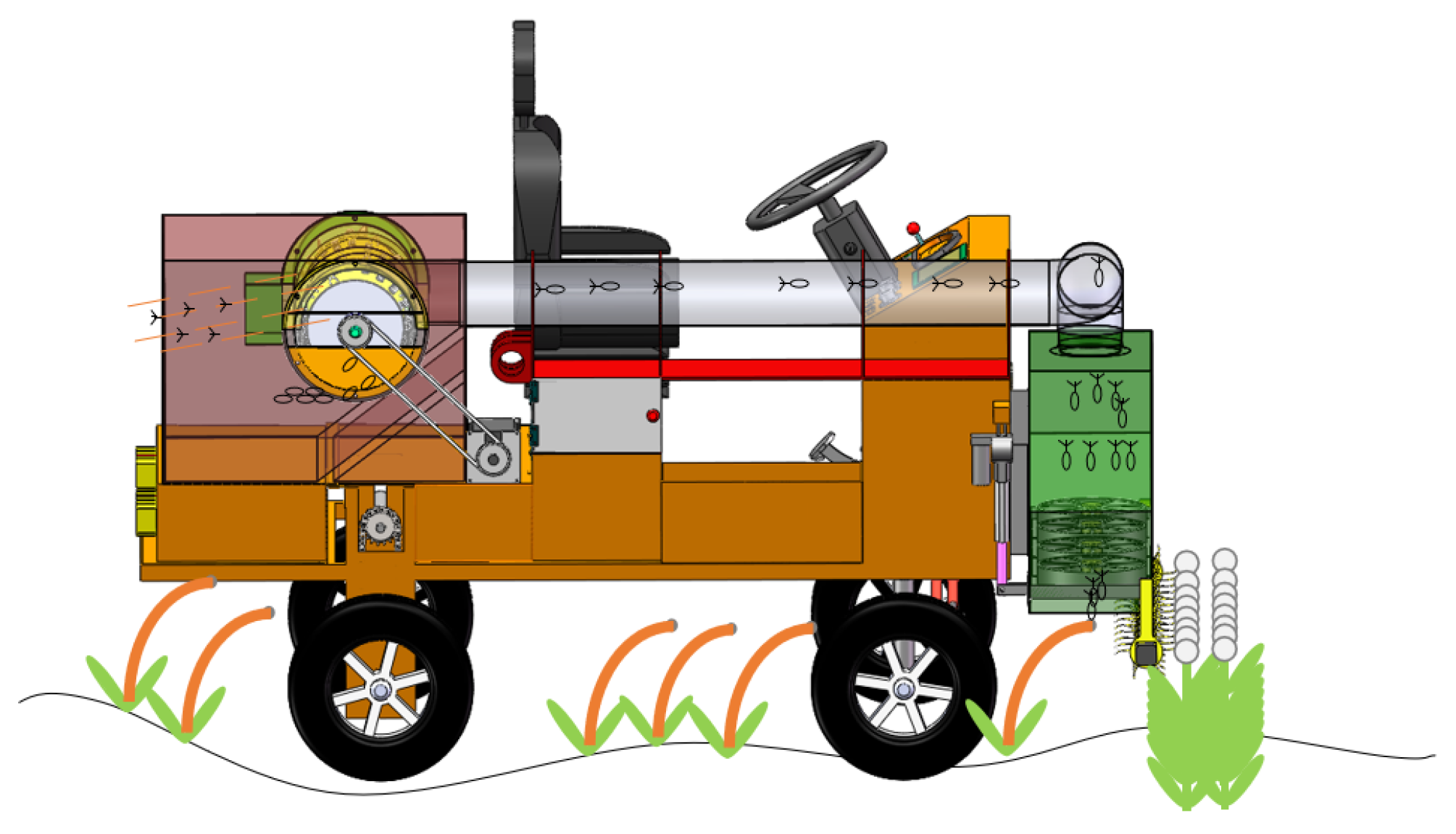
2.2. Working Mechanism
- (1)
- Collection. The disturbing roller in the lower part of the collection device is used to disturb plants so that seeds have a lower connection force to the plant and even fall from the plant. As a result, the wind velocity of blowers needed to collect seeds can be decreased, easing their collection. The negative-pressure blowers create a negative-pressure environment near the feed port to collect seeds with pappi in the devices [13,14,15]. The mixtures are then transported to the separation devices via the transmission pipeline.
- (2)
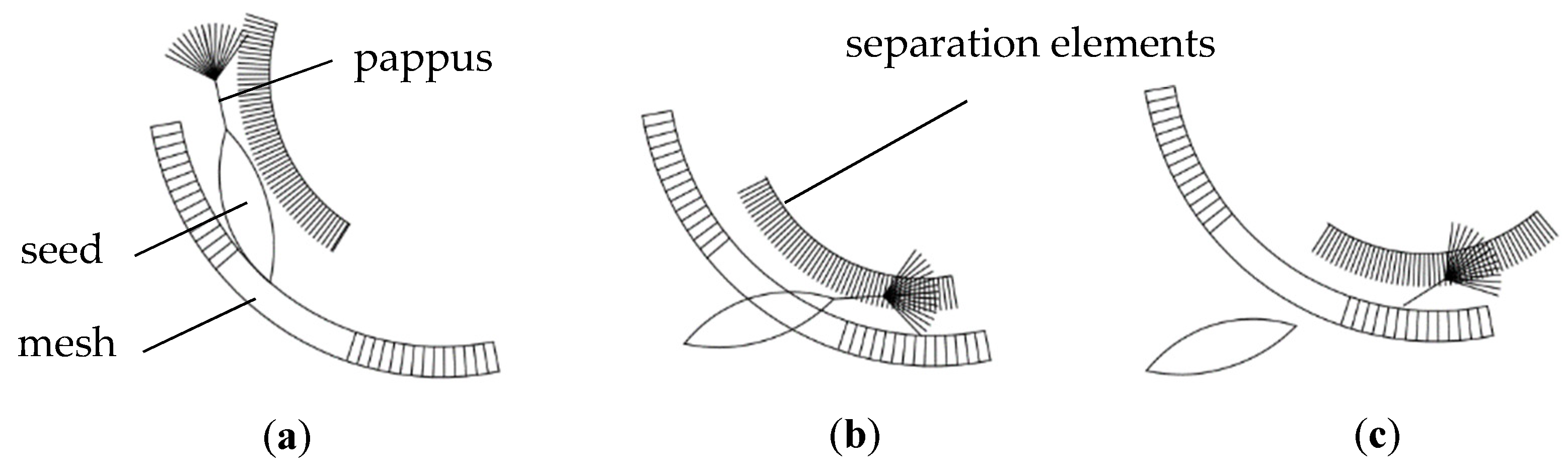
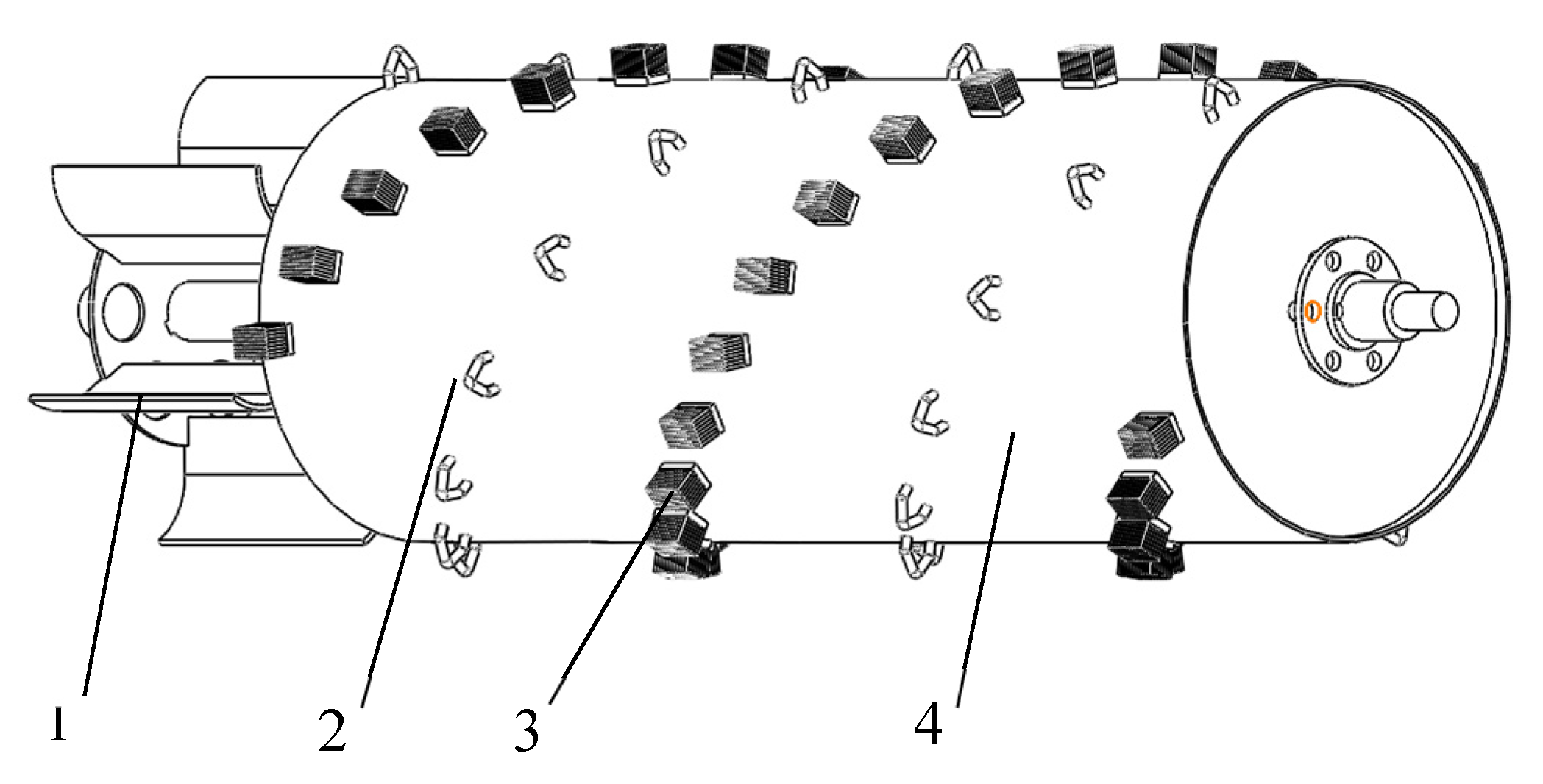
- Separation. Seeds with pappi are transported to the separation devices through the transmission pipeline. Two types of separation elements, namely, wire-loops and hairbrushes on the separation drum, beat and rub seeds with pappi so that the seeds are uniformly dispersed in the devices, followed by the separation of seeds from pappi.
3. Design of Key Components
3.1. Material Characteristics
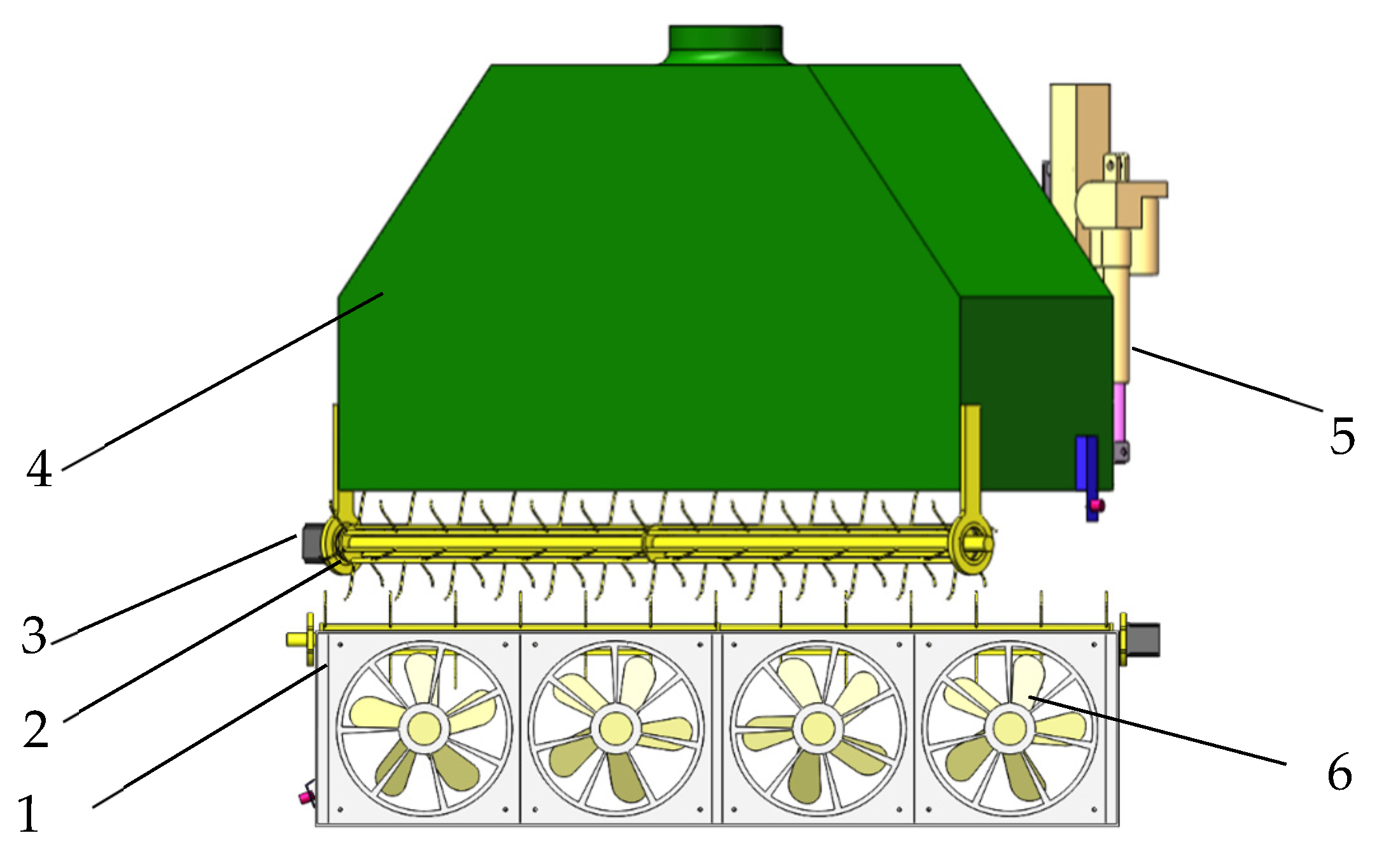
3.2. Design of the Collection Devices
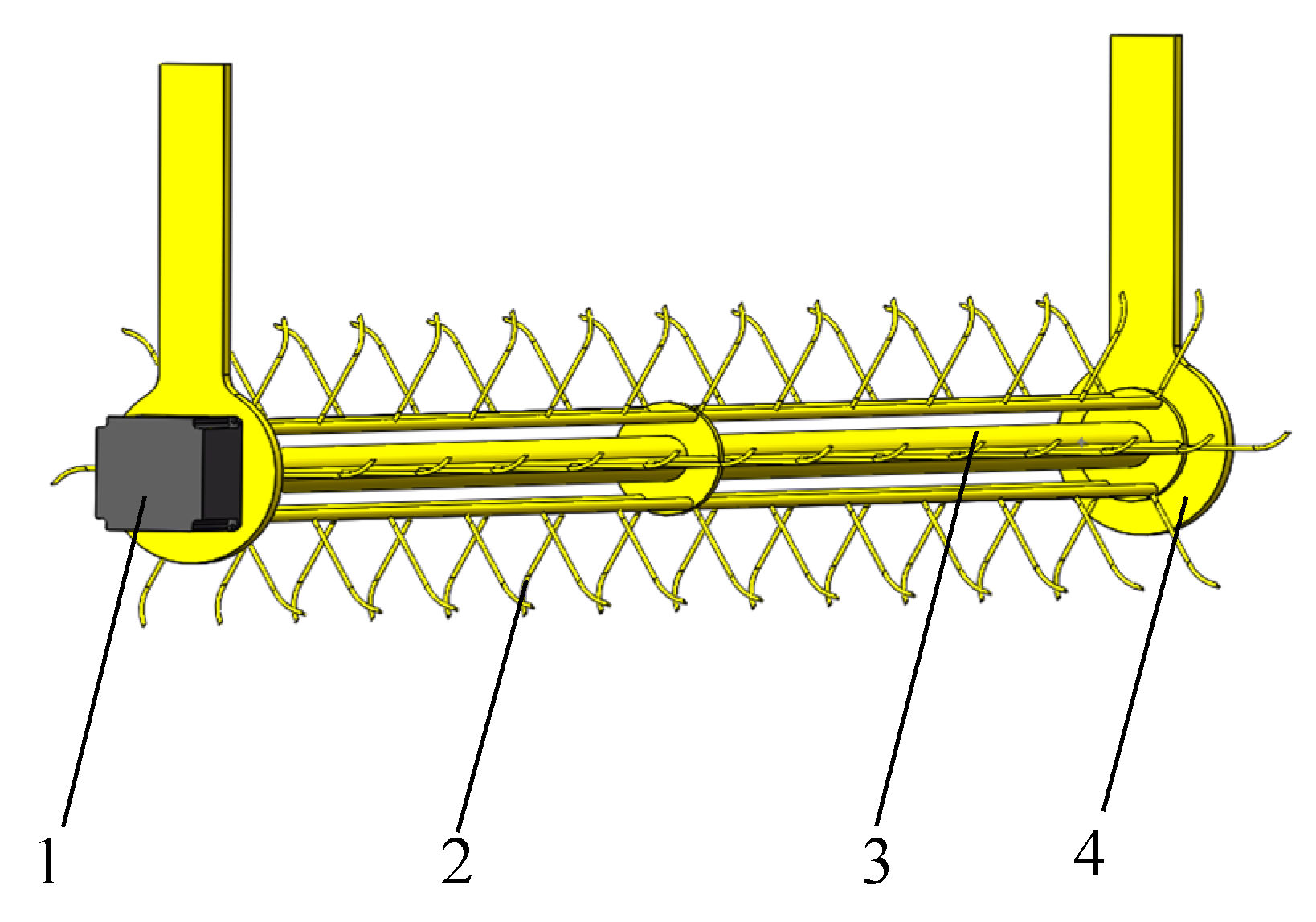
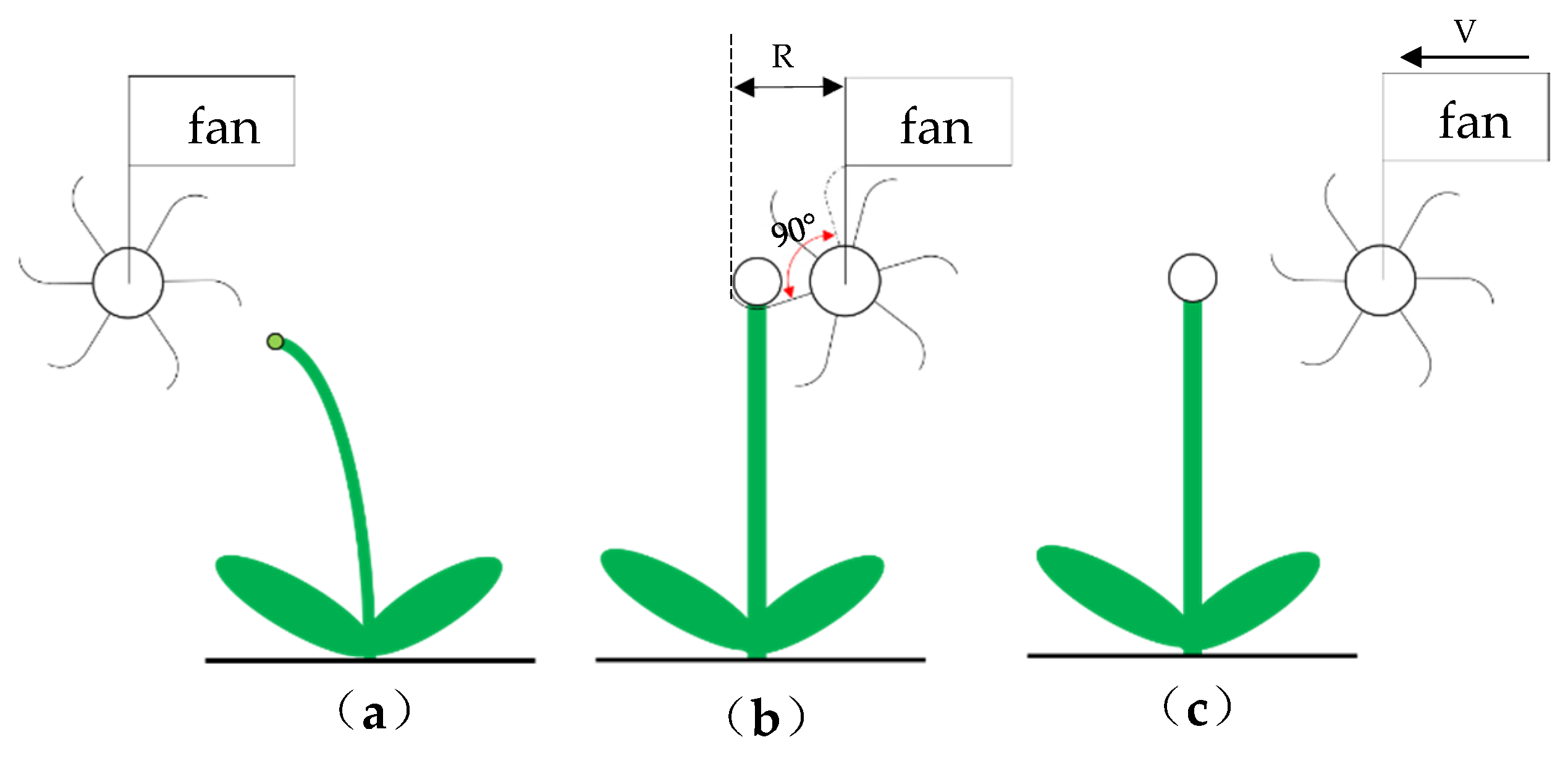
3.2.1. Design of the Disturbing Roller
3.2.2. Design of Negative-Pressure Blowers
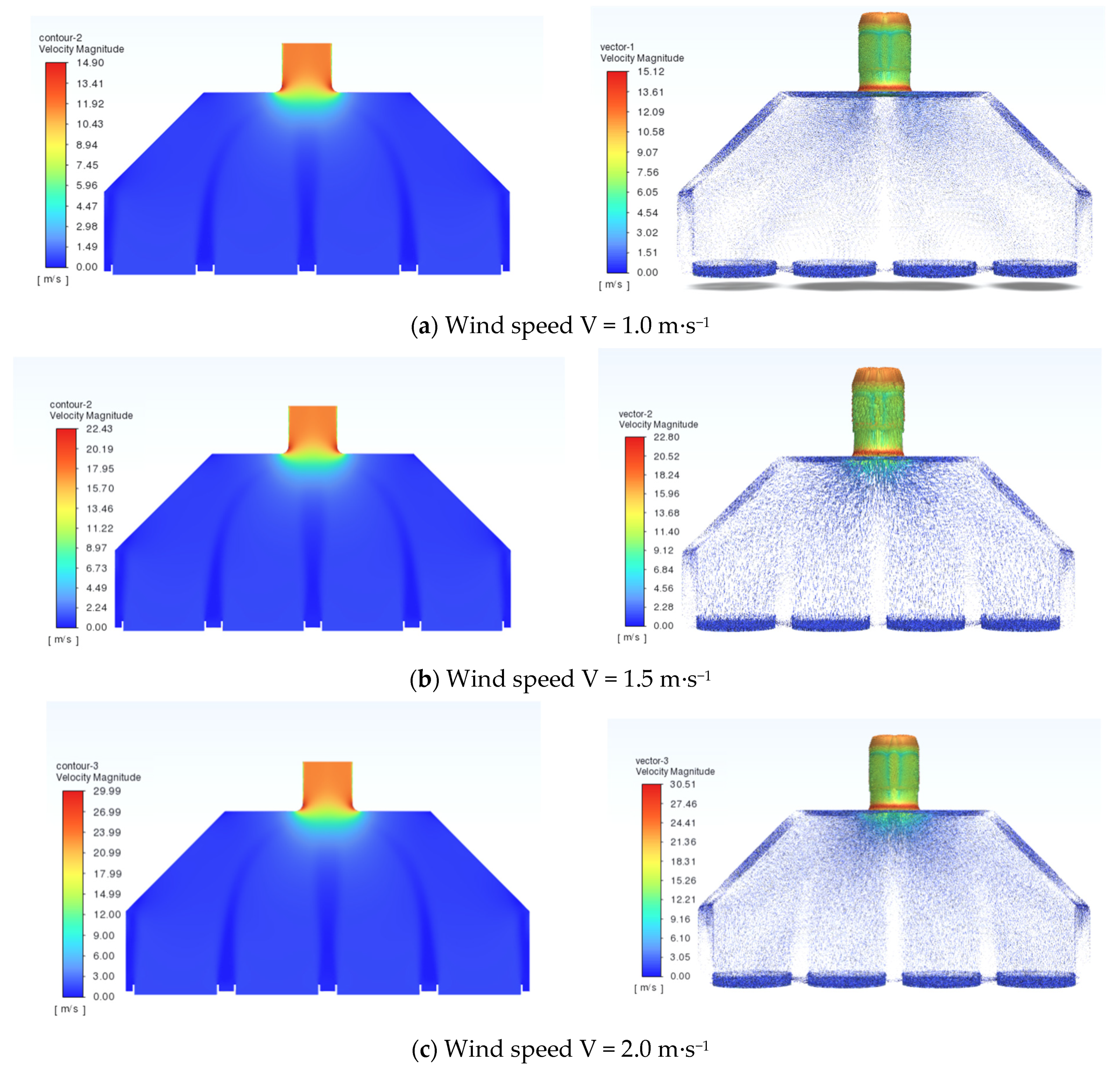
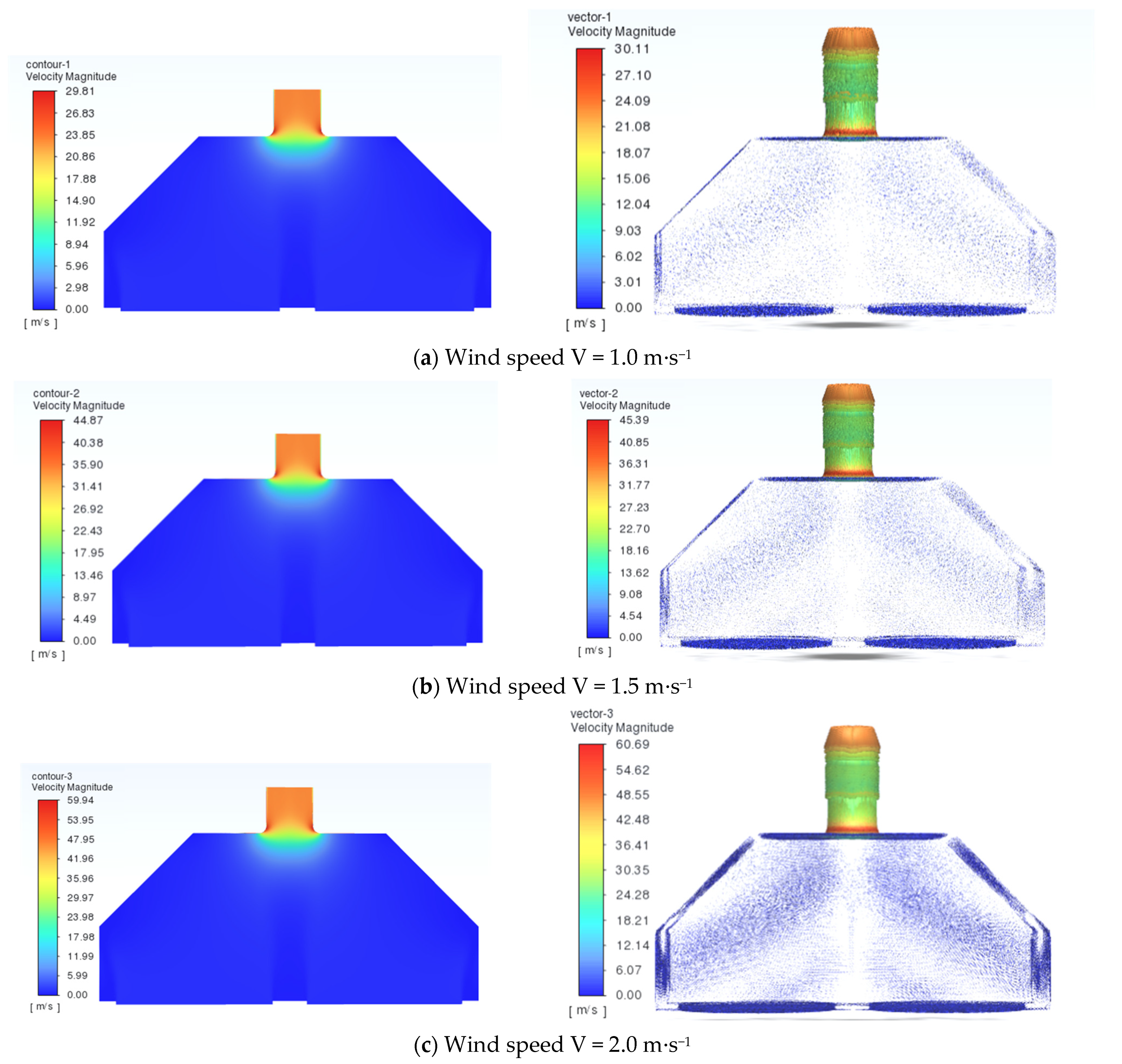
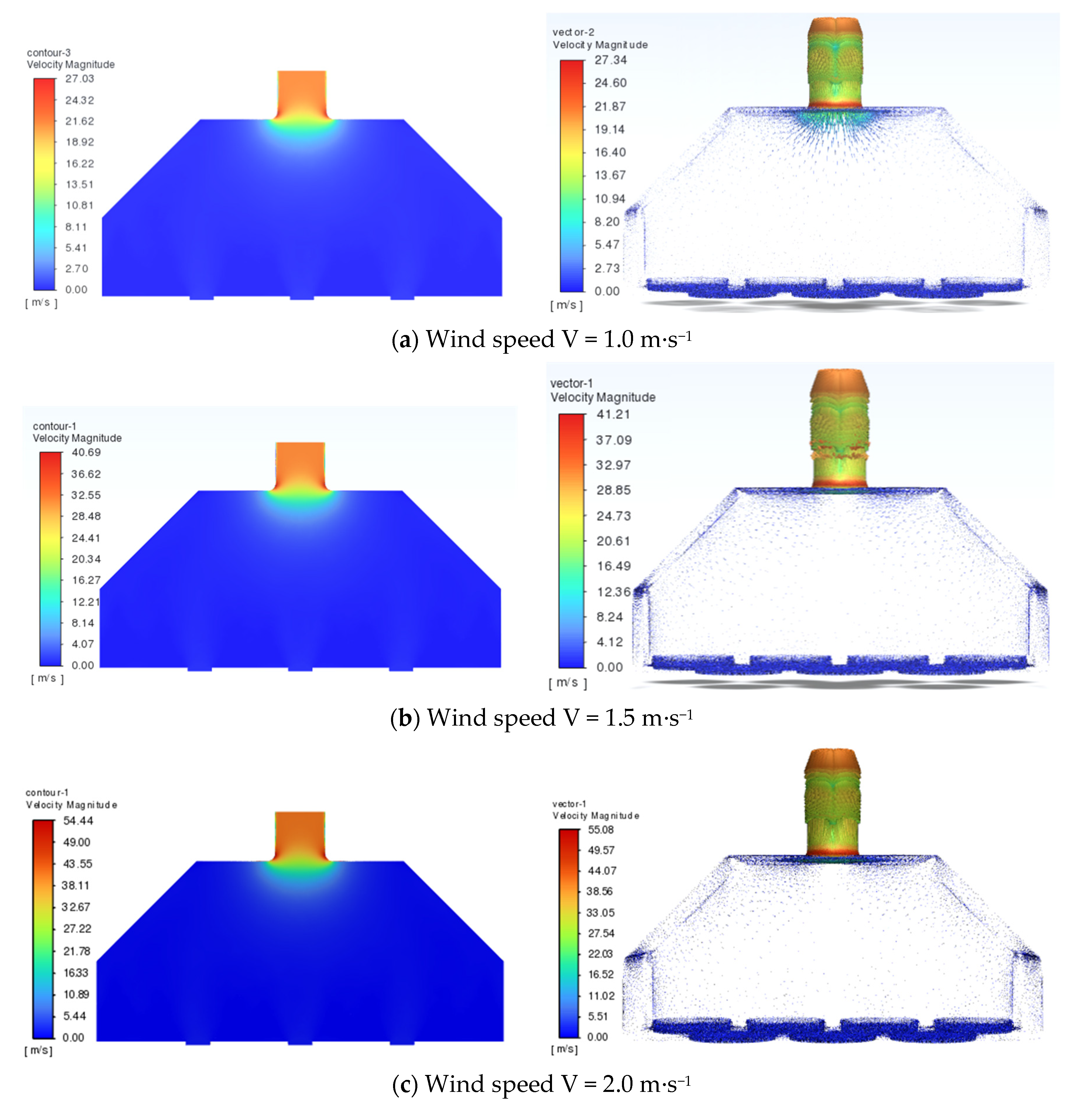
3.3. Flow-Field Simulation of the Collection Devices
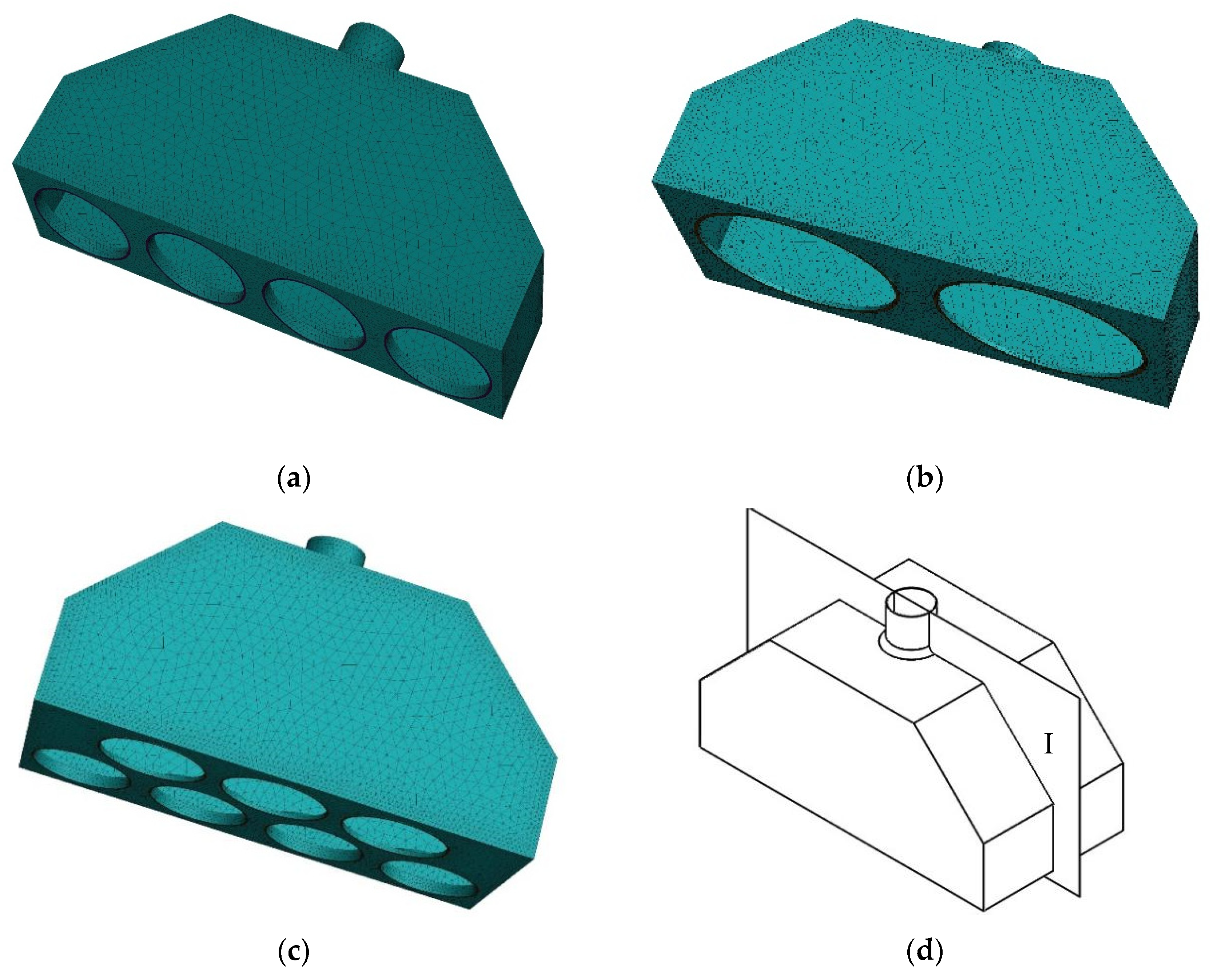
3.3.1. Mesh Generation
3.3.2. Simulation Results and Analysis
3.4. Design of the Separation Devices
3.4.1. Design of the Separation Drum
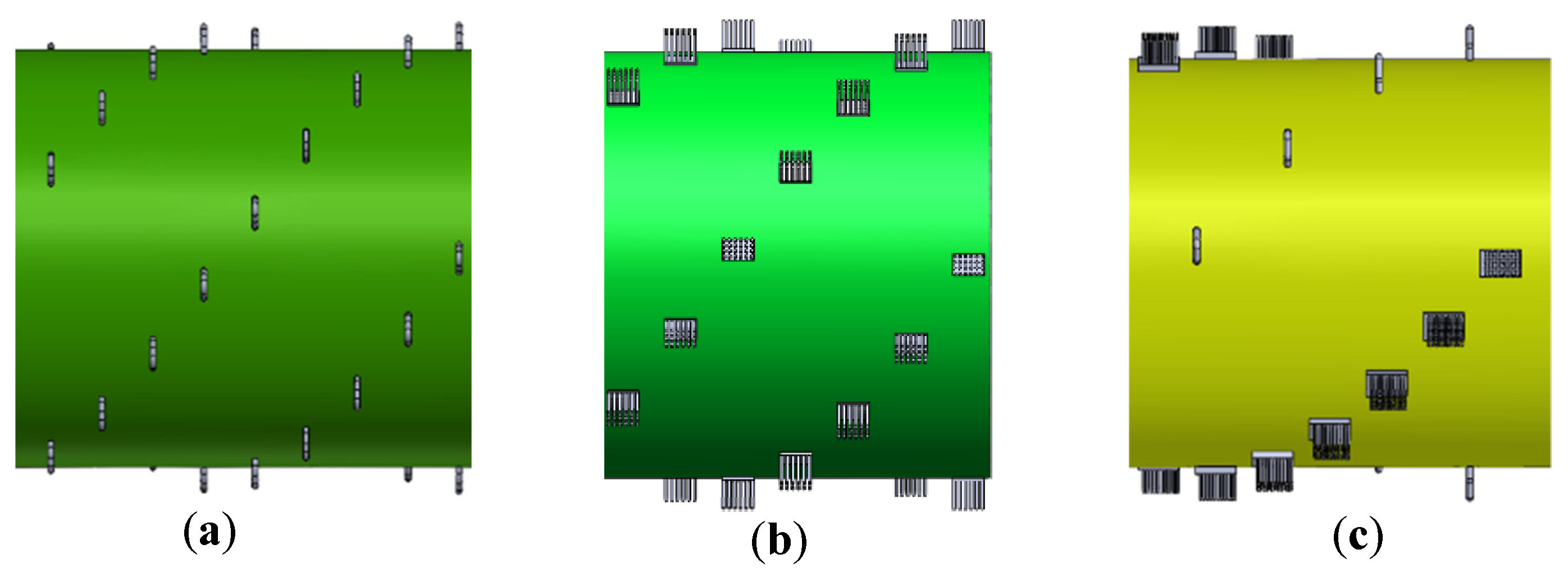
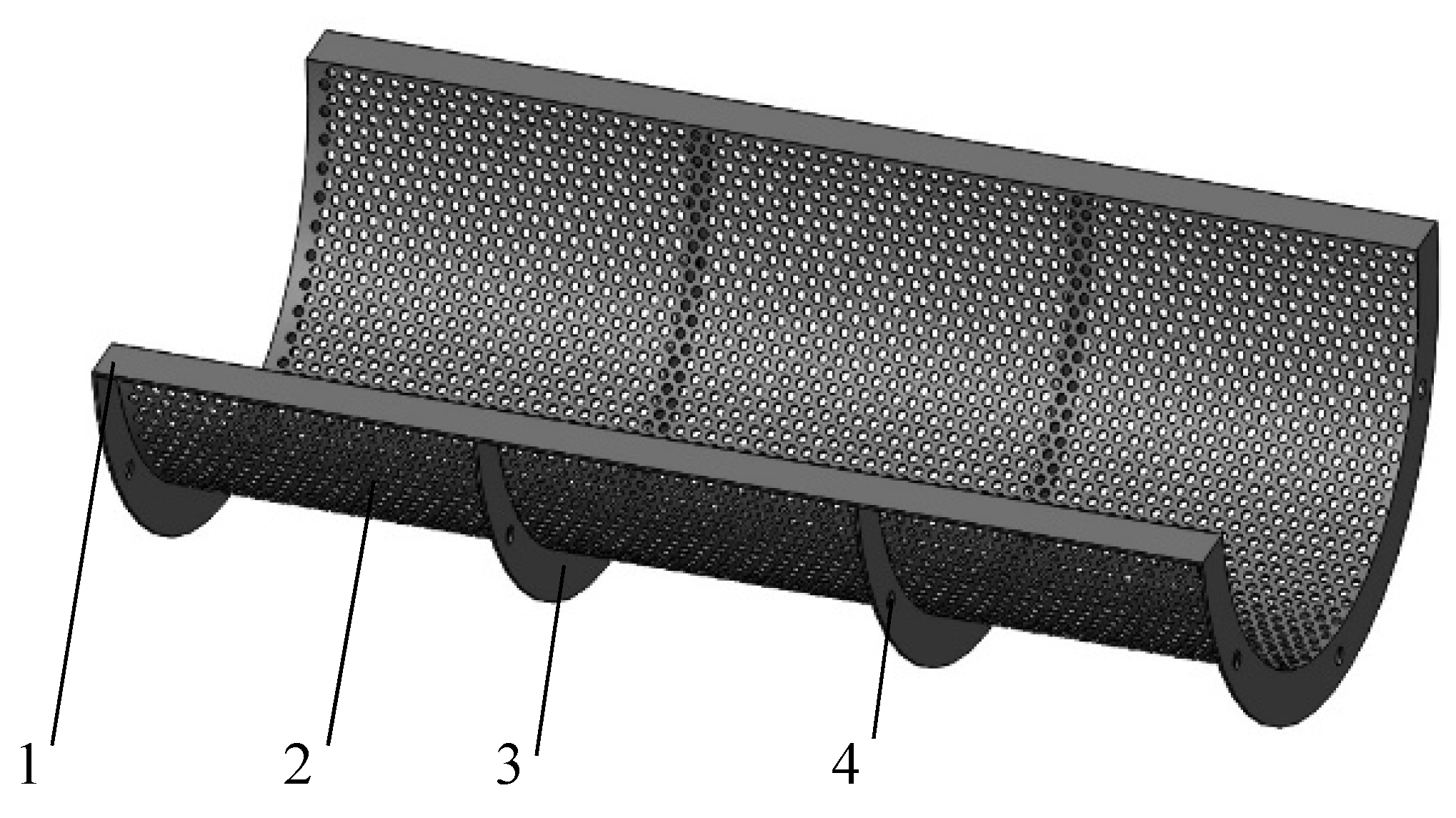
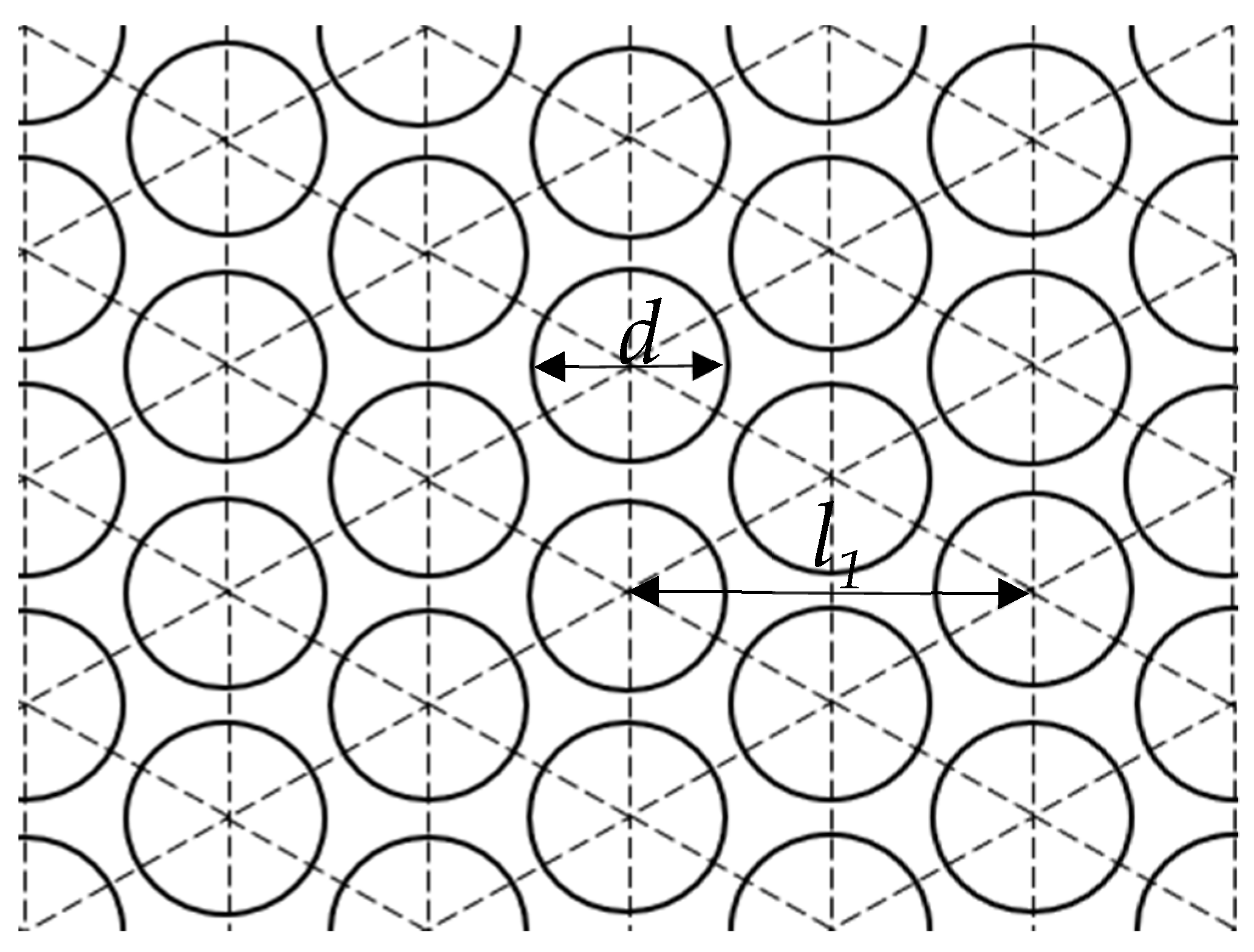
3.4.2. Design of the Concave Board
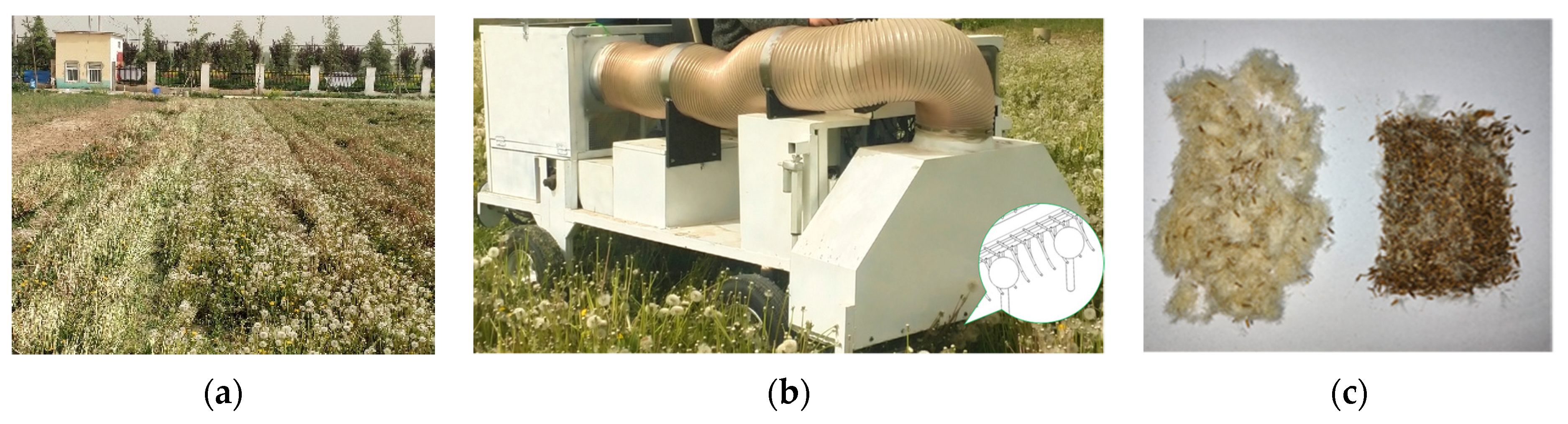
4. Field Tests
4.1. Test Conditions
4.2. Harvesting Tests
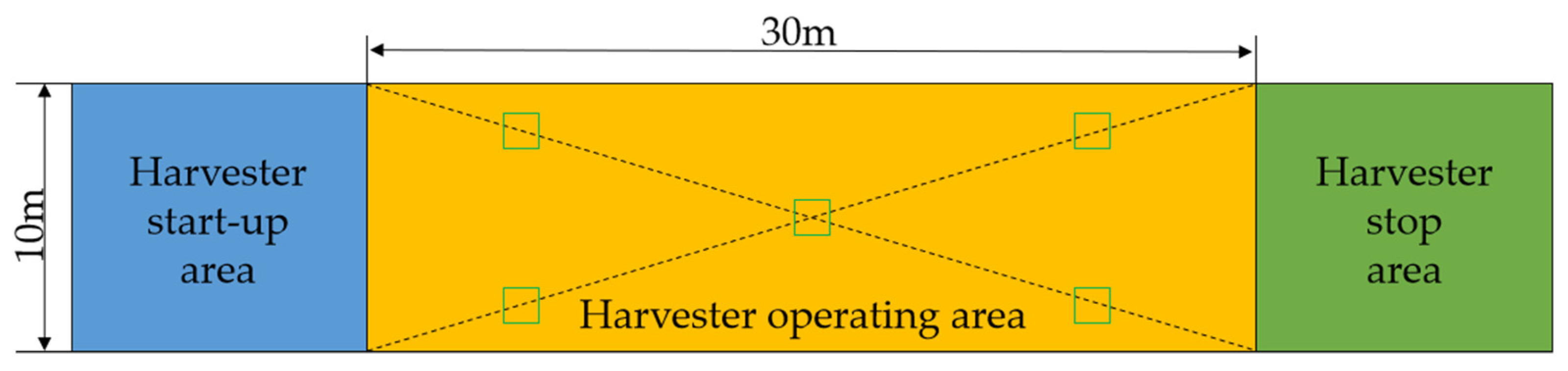
4.2.1. Test Methods
4.2.2. Test Design
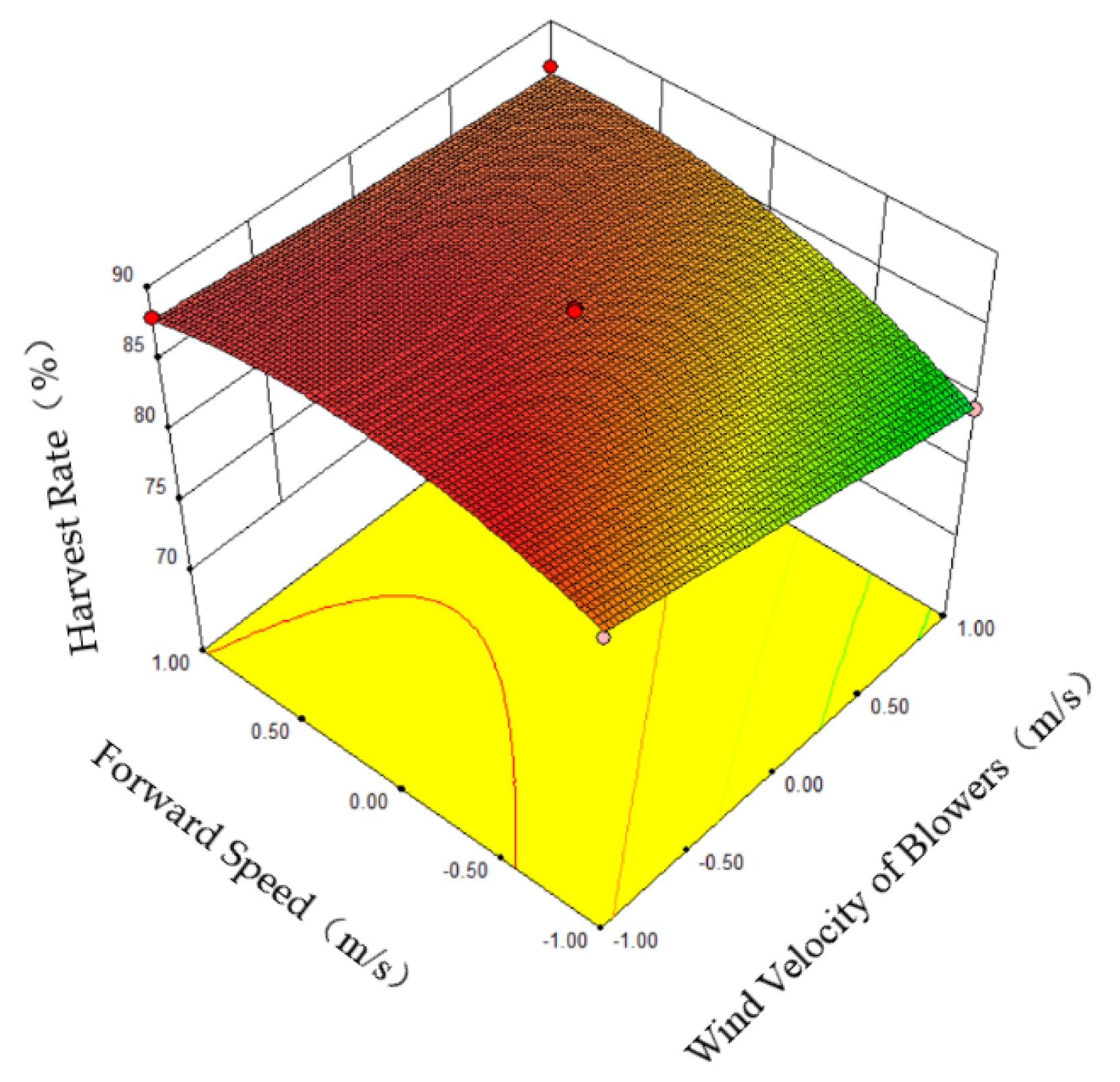
4.3. Test Analysis
4.4. Optimal Parameters
5. Discussion
- Environmental influences:Under strong external natural wind, the blowers fail to draw all falling seeds into the harvester, which may cause a collection loss. If the ground is rough, seeds falling off under the disturbance of the disturbing roller cannot be collected due to the rugged ground and long distance from the blowers that results in inadequate wind strength, thus inducing the collection loss.
- Inconsistent maturity:Dandelion seeds have different degrees of maturity: in the maturation period of dandelion seeds, the plants mature quickly and near-simultaneously, whereas the maturation period of the seeds is very short, so the seeds need to be harvested timeously. In the harvesting process, some immature seeds may be entrained, and thus have a high moisture content and a strong connection to the pappi. Therefore, the separation devices cannot timeously and effectively separate the immature dandelion seeds from the pappi, which decreases the separation rate, reducing the yield.
- Degree of proficiency of drivers:The degree of proficiency of drivers for the dandelion seed harvester exerts certain influences on the harvesting quality. If the driver is less adept, the normal operation of the harvester cannot be guaranteed, thus inducing a lower harvesting quality. Improving the proficiency of drivers for the harvester provides certain assistance in increasing the harvesting efficiency and quality.
6. Conclusions
- At present, there are few dandelion seed harvesters available, while manual harvesting of dandelion seeds calls for high labor intensity, is inefficient, and may induce a large loss of yield. To overcome these problems, a self-propelled dandelion seed harvester was designed. The harvester is mainly composed of collection devices, separation devices, transmission devices, and a rack. The harvester has the ability to collect and separate dandelion seeds.
- Important working parts, namely, the collection and separation devices of the harvester, were designed. The collection devices include the disturbing roller, collection cover, height-regulating device, and negative-pressure blowers. They are responsible for collecting dandelion seeds. The operating breadth of the harvester is 1.2 m. The operating height, forward speed, wind velocity of the blowers, and rate of rotation of the drum are adjustable within 0.35~0.45 m, 0.8~1.20 m·s−1, 1.0~2.0 m·s−1, and 300~500 rpm, respectively. The separation devices include the separation drum, concave board for separation, and impurity removal device, responsible for separating dandelion seeds from pappi. The length, diameter, and rate of rotation of the drum are 1.15 m, 0.4 m, and adjustable within 300~500 rpm, respectively.
- To explore the optimal working performance of the dandelion seed harvester, multi-factor field tests were performed. Field tests show that the harvesting effect is optimal under the following conditions: a forward speed of 0.8 m·s−1, a single-row layout of small blowers, a wind velocity of blowers of 1.63 m·s−1, a combined layout of separation elements (hairbrushes and wire-loops), a rate of rotation of the drum of 419 rpm, and the use of a perforated screen with circular holes on the concave board. The rate of collection of dandelion seeds reached 89.1%, which reaches the expected harvesting effect desired in the design of the dandelion seed harvester.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, R.L.; Lu, F.; Qin, L.L. Nutrition and health care function of dandelion. Food Nutr. China 2011, 17, 71–72. [Google Scholar]
- Gonzalez-Castejon, M.; Visioli, F.; Rodriguez-Casado, A. Diverse biological activities of dandelion. Nutr. Rev. 2012, 70, 534–547. [Google Scholar] [CrossRef]
- Gu, L.W.; Wang, L.; Zhang, H.; Guan, H.B.; Zheng, Y. Nutritional value of dandelion and its development and utilization prospect. Jilin Veg. 2013, 4, 13–14. [Google Scholar]
- Ruiz-Juarez, D.; Melo-Ruiz, V.E.; Gutierrez-Rojas, M.; Sanchez-Herrera, K.; Cuamatzi-Tapia, O. Nutrient Value in Dandelion Flower (Taraxacum officinale). Ann. Nutr. Metabolism. 2020, 76, 102. [Google Scholar]
- Hao, W.L.; Mu, C.C. The medicinal value of fresh dandelions. J. Benef. Readiness Drug Inf. Med. Advices 2017, 65–66. [Google Scholar]
- Chen, R.J.; Wang, Q.Y.; La, X.J.; Li, J.A.; Liang, G.T.; Cao, H.J.; Wang, Y.Y.; Zhang, M. Advances in medicinal research of dandelion. Mod. J. Integr. Tradit. Chin. West. Med. 2021, 30, 563–567. [Google Scholar]
- Zhao, L.; Yang, Y.J.; Lin, D. Economic value of dandelion. Liaoning Agric. Sci. 2006, 33–35. [Google Scholar]
- Inner Mongolia Academy of Agricultural & Animal Husbandry Sciences. A New Handheld Dandelion Seed Harvestingdevice:CN212184213U[P]. Available online: https://patents.google.com/patent/CN212184213U/zh (accessed on 22 December 2020).
- Zhang, Y. Cross-Walking Remote-Controlled Dandelion Seed Harvester Based on the Principle of Vacuum Cleaner: CN214282208U [P]. Available online: https://patents.google.com/patent/CN214282208U/en?oq=CN214282208U (accessed on 28 September 2021).
- Yin, G.; Lin, G.F.; Song, J.J.; Li, J.L.; Zhang, Y.B.; Lu, Z.Y.; Xie, S.Q.; Chen, J.; Sun, L. Dandelion Harvester China: CN207476241U [P]. Available online: https://patents.google.com/patent/CN207476241U/en?oq=CN207476241U (accessed on 12 June 2018).
- Shandong University of Science and Technology. The Utility Model Relates to a Dandelion Seed Harvesting Device China: CN210537495U [P]. Available online: https://patents.google.com/patent/CN210537495U/en?oq=CN210537495U (accessed on 19 May 2018).
- Zhengzhou Zhifeng Electrical Technology Co., Ltd. The Utility Model Relates to a Dandelion Seed Collecting Device China: CN112121922A [P]. Available online: https://patents.google.com/patent/CN112121922A/en?oq=CN112121922A (accessed on 25 December 2020).
- Xu, H.Z.; Hua, Y.; He, J.; Chen, Q.L. The Positive and Negative Synergistic Airflow-Type Jujube Fruit Harvester (P-N JH). Processes 2022, 10, 1486. [Google Scholar] [CrossRef]
- Kang, W.S.; Guyer, D. Development of Chestnut Harvesters for Small Farms. J. Biosyst. Eng. 2008, 33, 384–389. [Google Scholar] [CrossRef]
- Bedane, G.M.; Gupta, M.L.; George, D.L. Development and evaluation of a guayule seed harvester. Ind. Crops Prod. 2008, 28, 177–183. [Google Scholar] [CrossRef]
- Zhao, X.Q.; Wang, W.F. Study on ecological characteristics of wild dandelion seed from beihua university. For. Prospect. Des. 2020, 49, 93–95. [Google Scholar]
- Zhang, F.K. Design and Optimization Test of Air Suction Floor Jujube Picking Machine; Tarim University: Xinjiang, China, 2020. [Google Scholar]
- Hebei University of Technology. An Air Suction Medlar Picking Machine: CN203120470U [P]. Available online: https://patents.google.com/patent/CN203120470U/en?oq=CN203120470U (accessed on 14 August 2013).
- Xiao, H.R.; Ding, W.Q.; Mei, S.; Song, Z.Y.; Zhang, Z.; Qin, G.M.; Zhao, Y.A. A Vibrating Chinese Wolfberry Picking Mechanism. Chinese Patent CN205491807U, 24 August 2016. [Google Scholar]
- Xu, L.M.; Chen, J.W.; Wu, G.; Yuan, Q.C.; Ma, S.; Yu, C.C.; Duan, Z.Z.; Xing, J.J.; Liu, X.D. Design and operating parameter optimization of comb brush vibratory harvesting device for wolfberry. Trans. Chin. Soc. Agric. Eng. 2018, 34, 75–82. [Google Scholar]
- Han, D.D. Design of Harvesting Device of Safflower Petals Based on Pneumatic and Simulation of Airflow Field; Shihezi University: Xinjiang, China, 2014. [Google Scholar]
- Pang, M.J.; Lu, Y.; Bao, J.; Chen, R. The Design Principle of the Gas Trap Hood and Numerical Simulation of Its Flow Fielo. Light Ind. Mach. 2006, 24, 45–47. [Google Scholar]
- Yang, G.; Chen, Q.M.; Xia, X.F.; Chen, J.N.; Song, Z.Y. Design and optimization of key components of 4DL-5A faba bean combine harvester. Trans. Chin. Soc. Agric. Eng. 2021, 3, 10–18. [Google Scholar]
- Wu, J.; Tang, Q.; Mu, S.L.; Jiang, L.; Hu, Z.C. Test and Optimization of Oilseed Rape (Brassica napus L.) Threshing Device Based on DEM. Agriculture 2022, 12, 1580. [Google Scholar] [CrossRef]
- Li, X.P.; Zhang, W.T.; Wang, W.Z.; Huang, Y. Design and Test of Longitudinal Axial Flow Staggered Millet Flexible Threshing Device. Agriculture 2022, 12, 1179. [Google Scholar] [CrossRef]
- Wang, S.S.; Lu, M.Q.; Hu, J.P.; Chen, P.; Ji, J.T.; Wang, F.M. Design and experiment of chinese cabbage seed threshing device combined with elastic short-raspbar tooth. Trans. Chin. Soc. Agric. Mach. 2021, 52, 86–94. [Google Scholar]
- Sudajan, S.; Salokhe, V.M.; Triratanasirichai, K. Effect of type of drum, drum speed and feed rate on sunflower threshing. Biosyst. Eng. 2002, 83, 13–21. [Google Scholar]
- Di, Z.F.; Cui, Z.K.; Zhang, H.; Zhou, J.; Zhang, M.Y.; Piao, L.X. Design and experiment of rasp bar and nail tooth combined axial flow corn threshing cylinder. Trans. Chin. Soc. Agric. Eng. 2018, 34, 28–34. [Google Scholar]
- Koyuncu, T.; Peksen, E.; Sessiz, A.; Pinar, Y. Chickpea threshing efficiency and energy consumption for different beater-contrbeater combinations. Agric. Mech. Asia Afr. Lat. Am. 2007, 38, 53–57. [Google Scholar]
- Meng, F.H.; Jiang, M.; Geng, D.Y.; Lin, J.H.; Xu, H.G. The Design of Longitudinal-axial Cylinder for the Combine. J. Agric. Mech. Res. 2019, 41, 90–94. [Google Scholar]
- Li, H.T.; Wan, X.Y.; Wang, H.; Jiang, Y.J.; Liao, Q.X. Design and Experiment on Integrated Longitudinal Axial Flow Threshing and Separating Device of Rape Combine Harvester. Trans. Chin. Soc. Agric. Mach. 2017, 48, 108–116. [Google Scholar]
- Liao, Q.X.; Xu, Y.; Yuan, J.C.; Wan, X.Y.; Jiang, Y.J. Design and Test of Longitudinal Axial Flexible Hammer-claw Corn Thresher. Trans. Chin. Soc. Agric. Mach. 2019, 50, 140–150. [Google Scholar]
- Sessiz, A.; Koyuncu, T.; Pinar, Y. Soybean threshing efficiency and power consumption for different concave materials. Ama Agric. Mech. Asia Afr. Lat. Am. 2007, 38, 56–59. [Google Scholar]
- Liao, Q.X.; Wan, X.Y.; Li, H.T.; Ji, M.T.; Wang, H. Design and experiment on cyclone separating cleaning system for rape combine harvester. Trans. Chin. Soc. Agric. Eng. 2015, 31, 24–31. [Google Scholar]
- Abbas, A.A.-A. The Effect of Combine Harvester Speed, Threshing Cylinder Speed and Concave Clearance on Threshing Losses of Rice Crop. J. Eng. Appl. Sci. 2019, 14, 9959–9965. [Google Scholar]
- Powar, R.V.; Aware, V.V.; Shahare, P.U. Optimizing operational parameters of finger millet threshing drum using RSM. J. Food Sci. Technol. 2019, 56, 3481–3491. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Overall dimension (mm) | 2450 × 1200 × 1100 |
| Height of chassis off the ground (mm) | 500 |
| Walking system power (w) | 1500 |
| Forward speed (m·s−1) | 0.8~1.2 |
| Wind velocity of blowers (m·s−1) Drum rotational speed (rpm) | 1.0~2.0 300~500 |
| Cutting width (mm) | 1200 |
| Item | Value |
|---|---|
| Row spacing (cm) | 15 |
| Plant height (cm) | 35~45 |
| Moisture content of seeds (%) | 9.82 |
| Diameter spherical seed heads (cm) | 4~6 |
| Suspension speed of seeds with pappi (m·s−1) | 0.82 |
| Seed length (cm) | 0.30~0.49 |
| Code | Experimental Factors | ||
|---|---|---|---|
| Forward Speed (m·s−1) | Wind Velocity of Blowers (m·s−1) | Drum Rotational Speed (rpm) | |
| −1 | 0.8 | 1.0 | 300 |
| 0 | 1.0 | 1.5 | 400 |
| 1 | 1.2 | 2.0 | 500 |
| No. | Experimental Factors | Experimental Index | ||
|---|---|---|---|---|
| Forward Speed | Wind Velocity of Blowers | Drum Rotational Speed | Harvest Rate | |
| 1 | −1 | −1 | 0 | 85.8% |
| 2 | 1 | −1 | 0 | 79.4% |
| 3 | −1 | 1 | 0 | 88.0% |
| 4 | 1 | 1 | 0 | 86.9% |
| 5 | −1 | 0 | −1 | 79.1% |
| 6 | 1 | 0 | −1 | 75.4% |
| 7 | −1 | 0 | 1 | 83.3% |
| 8 | 1 | 0 | 1 | 78.2% |
| 9 | 0 | −1 | −1 | 73.5% |
| 10 | 0 | 1 | −1 | 74.1% |
| 11 | 0 | −1 | 1 | 76.1% |
| 12 | 0 | 1 | 1 | 83.1% |
| 13 | 0 | 0 | 0 | 87.5% |
| 14 | 0 | 0 | 0 | 87.0% |
| 15 | 0 | 0 | 0 | 87.3% |
| 16 | 0 | 0 | 0 | 87.1% |
| 17 | 0 | 0 | 0 | 86.9% |
| Source of Variance | Sum of Square | Degree of Freedom | Mean Square | F | p |
|---|---|---|---|---|---|
| Model | 448.41 | 9 | 49.82 | 95.83 | <0.0001 |
| A-A | 33.21 | 1 | 33.21 | 63.88 | <0.0001 |
| B-B | 37.41 | 1 | 37.41 | 71.95 | <0.0001 |
| C-C | 43.25 | 1 | 43.25 | 83.17 | <0.0001 |
| AB | 7.02 | 1 | 7.02 | 13.51 | 0.0079 |
| AC | 0.49 | 1 | 0.49 | 0.94 | 0.3640 |
| BC | 10.24 | 1 | 10.24 | 19.7 | 0.0030 |
| A^2 | 0.029 | 1 | 0.029 | 0.055 | 0.8211 |
| B^2 | 20.7 | 1 | 20.7 | 39.82 | 0.0004 |
| C^2 | 286.06 | 1 | 286.06 | 550.19 | <0.0001 |
| Residual | 3.64 | 7 | 0.52 | ||
| Lack of Fit | 3.41 | 3 | 1.14 | 19.58 | 0.0075 |
| Pure Error | 0.23 | 4 | 0.058 | ||
| Cor Total | 452.05 | 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, Z.; Lu, Q.; Shao, H.; Liu, L.; Wang, X.; Lv, Z. Design and Testing of a Self-Propelled Dandelion Seed Harvester. Agriculture 2023, 13, 917. https://doi.org/10.3390/agriculture13040917
Qu Z, Lu Q, Shao H, Liu L, Wang X, Lv Z. Design and Testing of a Self-Propelled Dandelion Seed Harvester. Agriculture. 2023; 13(4):917. https://doi.org/10.3390/agriculture13040917
Chicago/Turabian StyleQu, Zhe, Qi Lu, Haihao Shao, Long Liu, Xiuping Wang, and Zhijun Lv. 2023. "Design and Testing of a Self-Propelled Dandelion Seed Harvester" Agriculture 13, no. 4: 917. https://doi.org/10.3390/agriculture13040917
APA StyleQu, Z., Lu, Q., Shao, H., Liu, L., Wang, X., & Lv, Z. (2023). Design and Testing of a Self-Propelled Dandelion Seed Harvester. Agriculture, 13(4), 917. https://doi.org/10.3390/agriculture13040917