


Design of a Spring-Finger Potato Picker and an Experimental Study of Its Picking Performance

 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Overall Structure and Working Principles
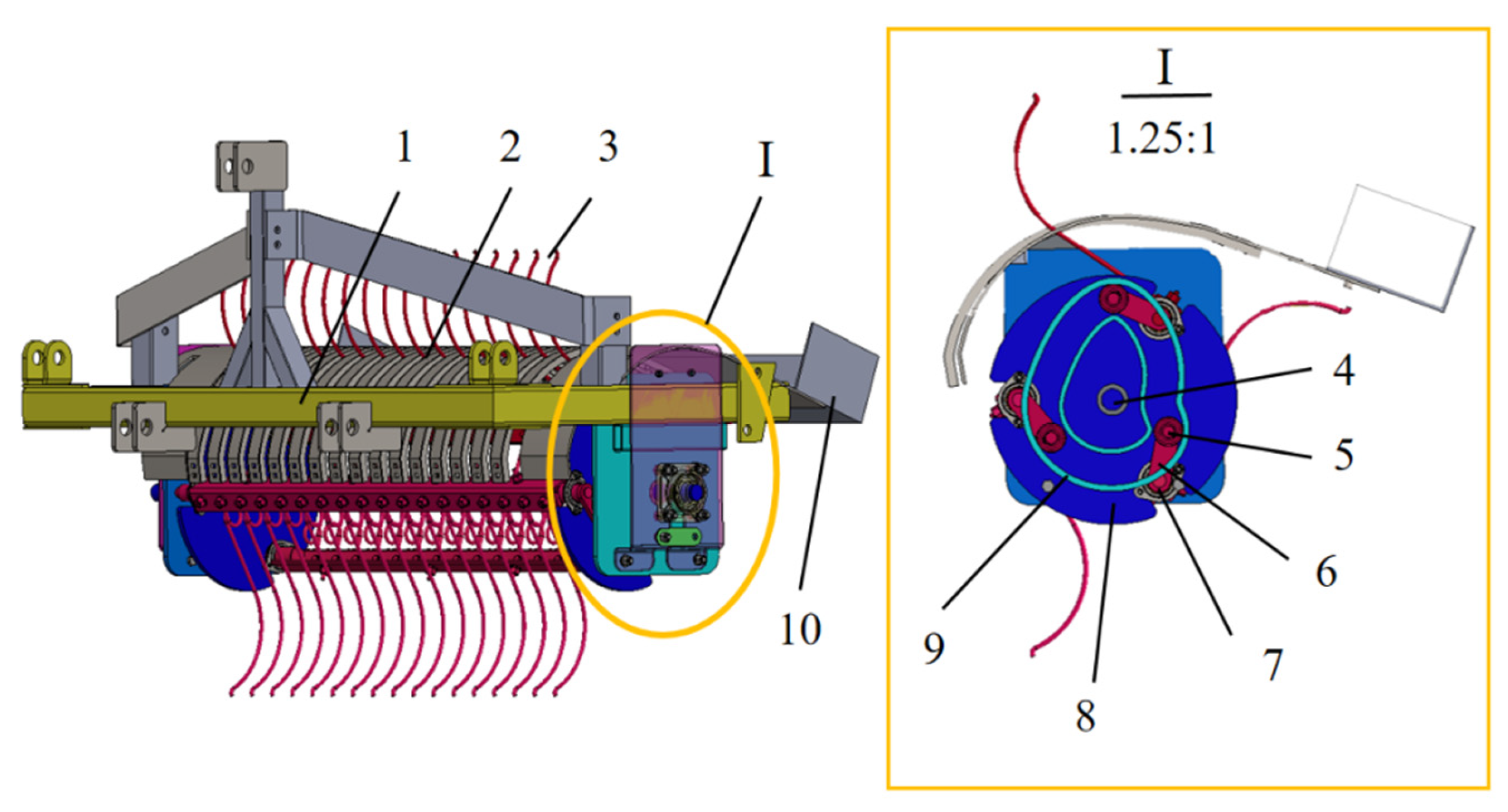
2.1.1. Overall Structure
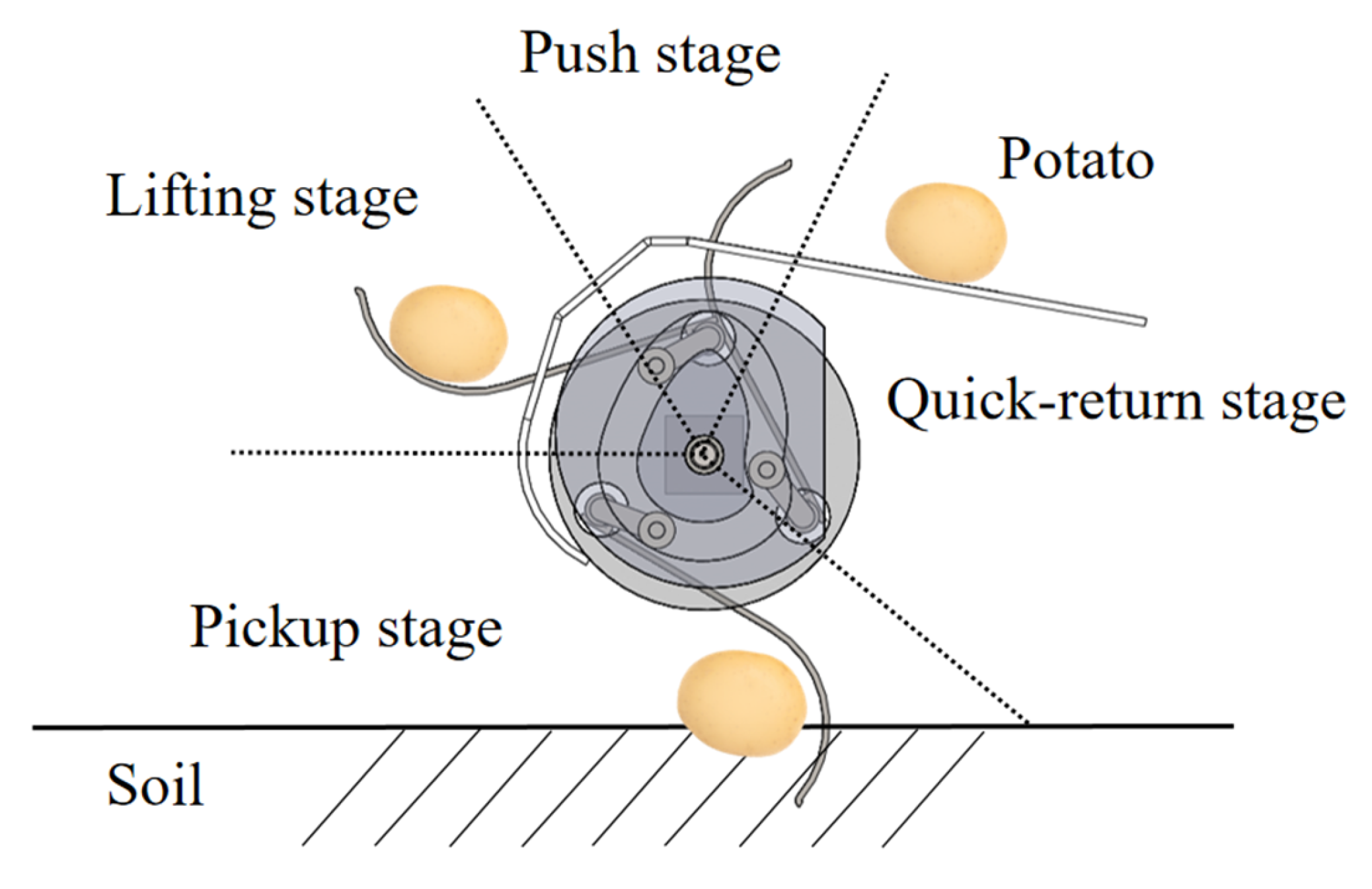
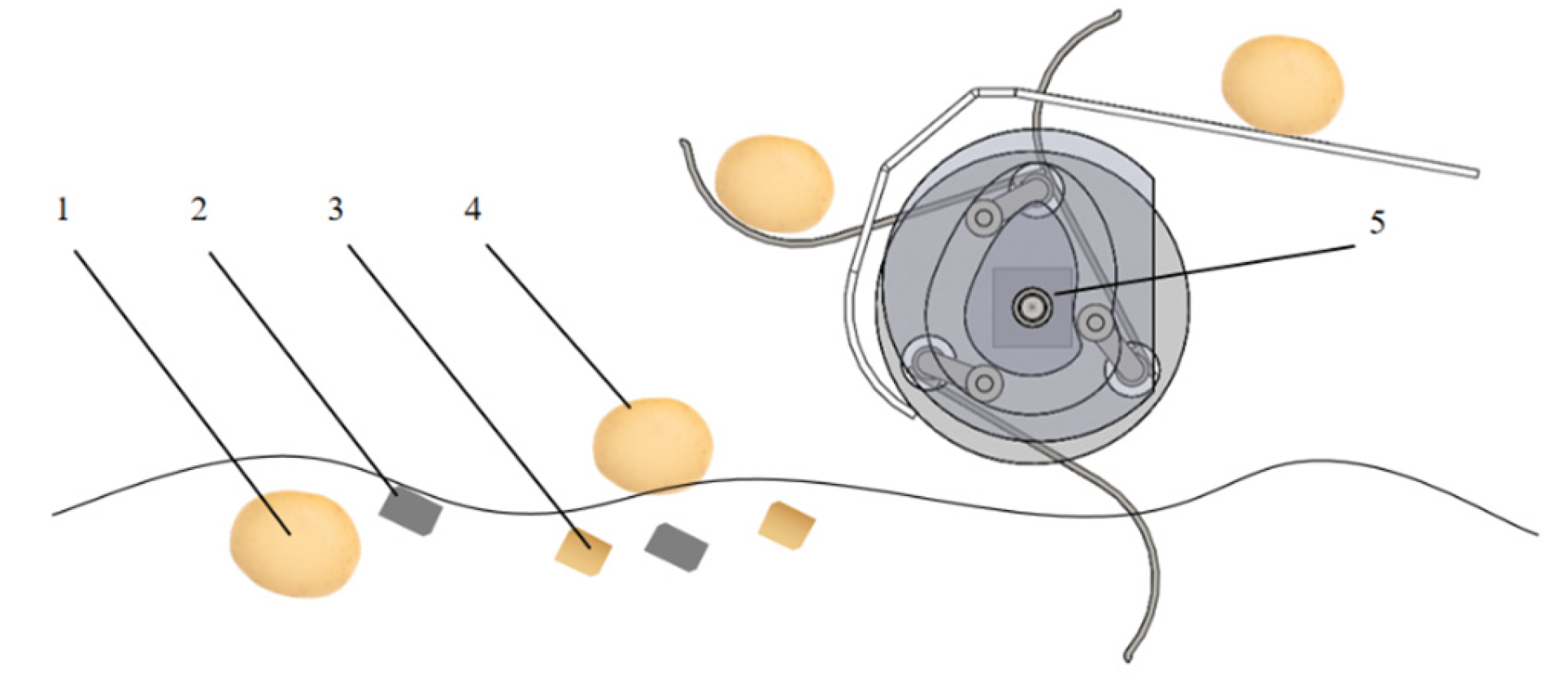
2.1.2. Principle of Operation
2.2. Design of Key Components
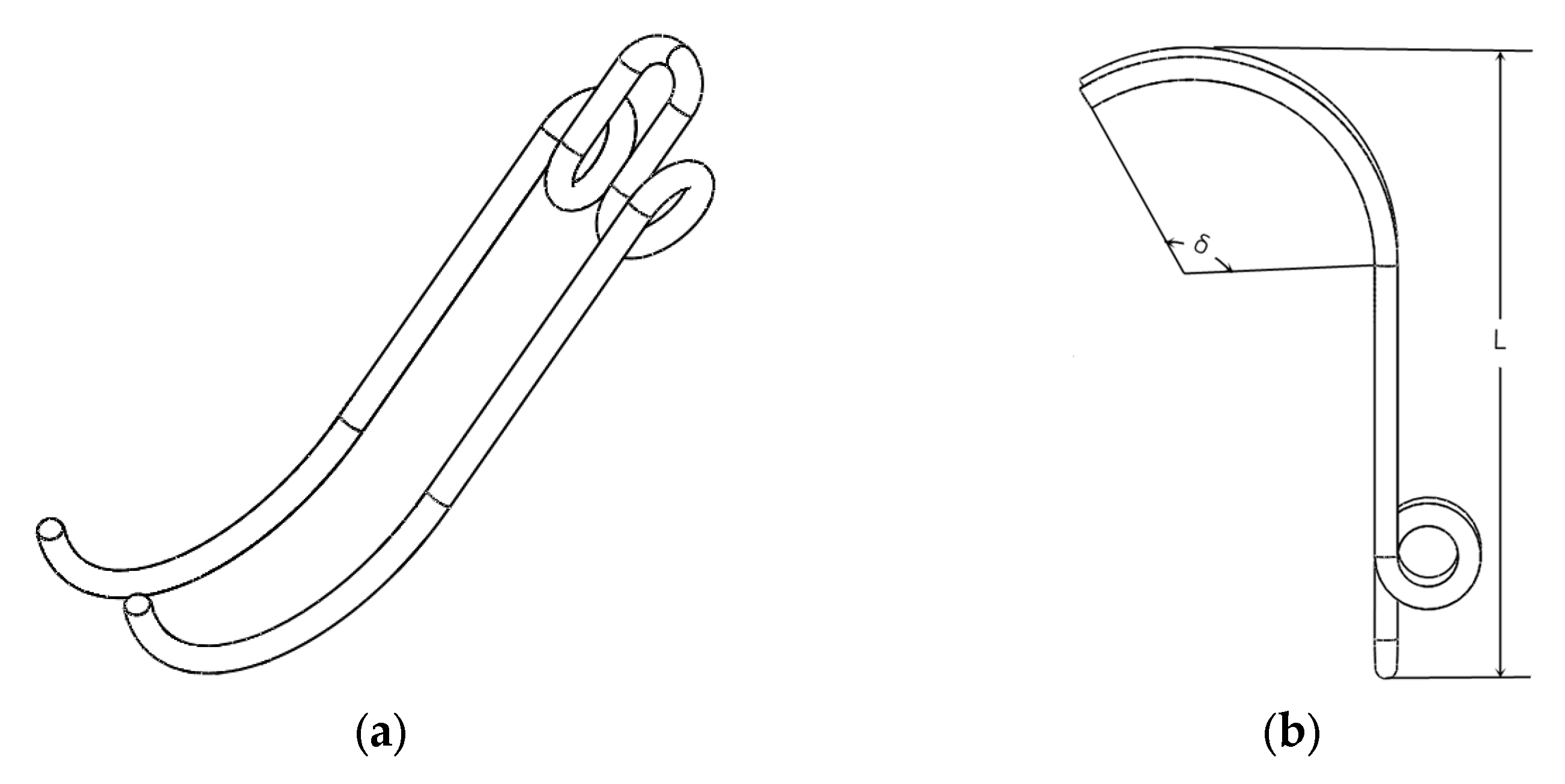
2.2.1. Spring-Finger
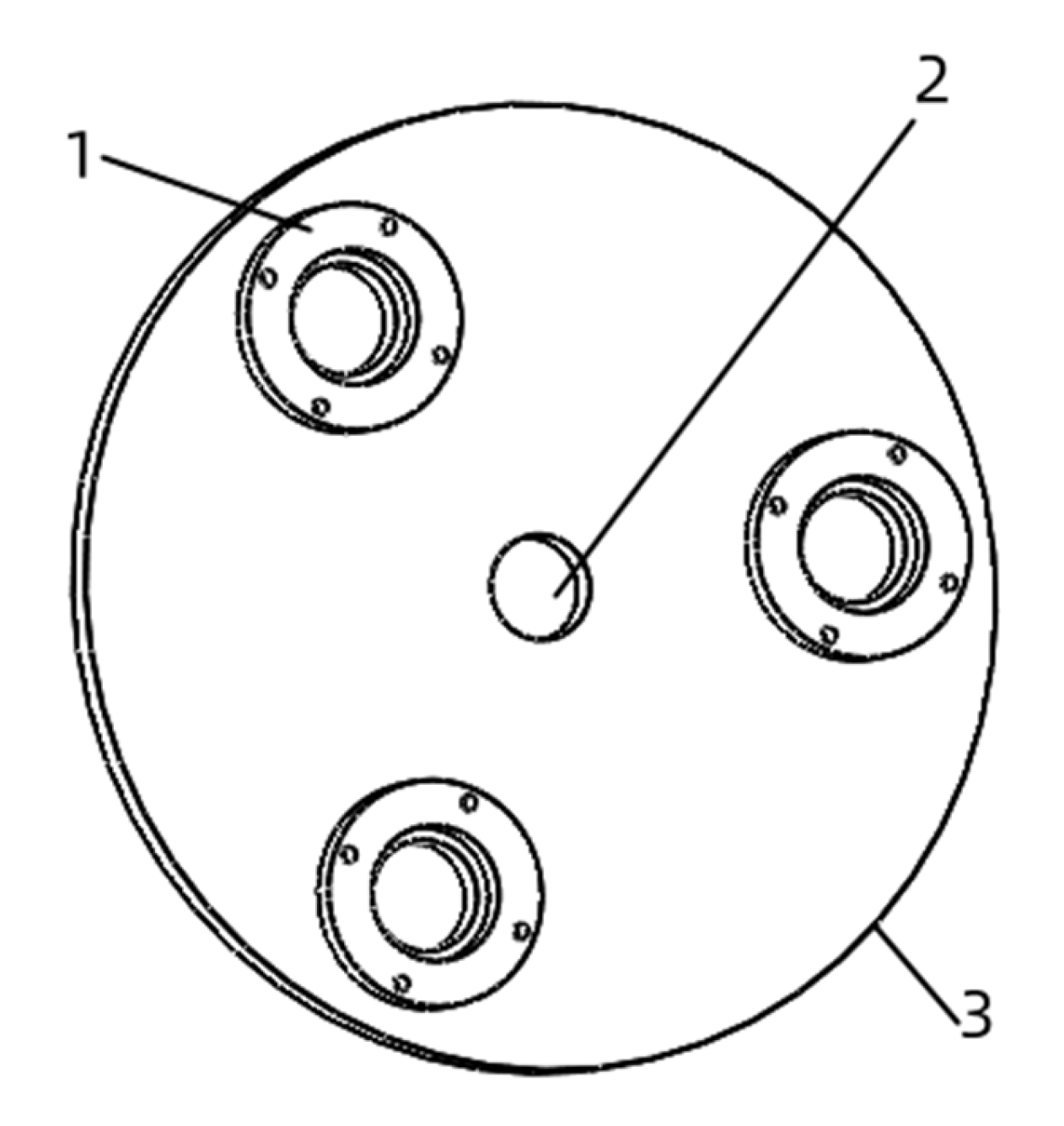
2.2.2. Roller Discs
2.2.3. Cranks and Rollers
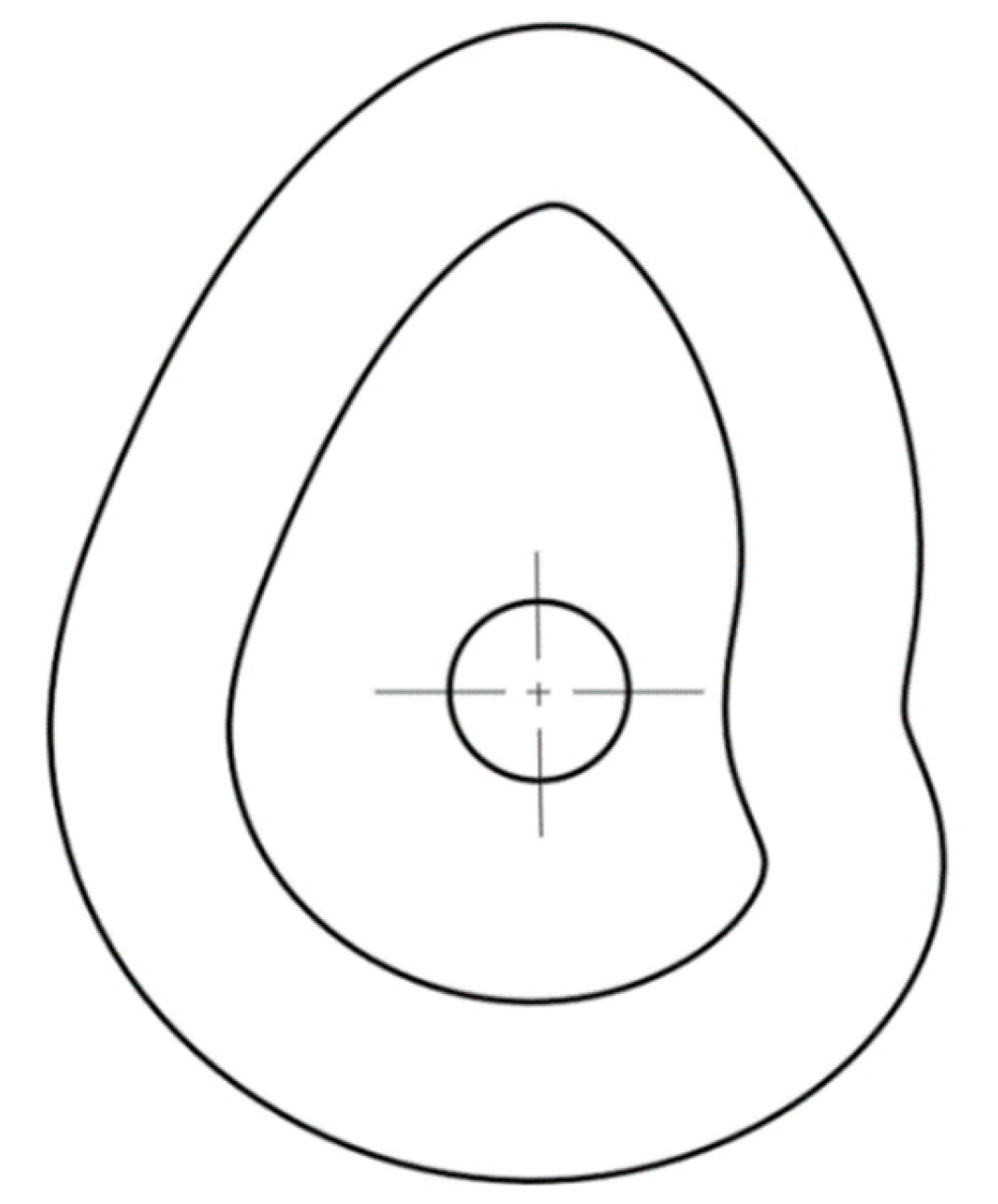
2.2.4. Cam Slides
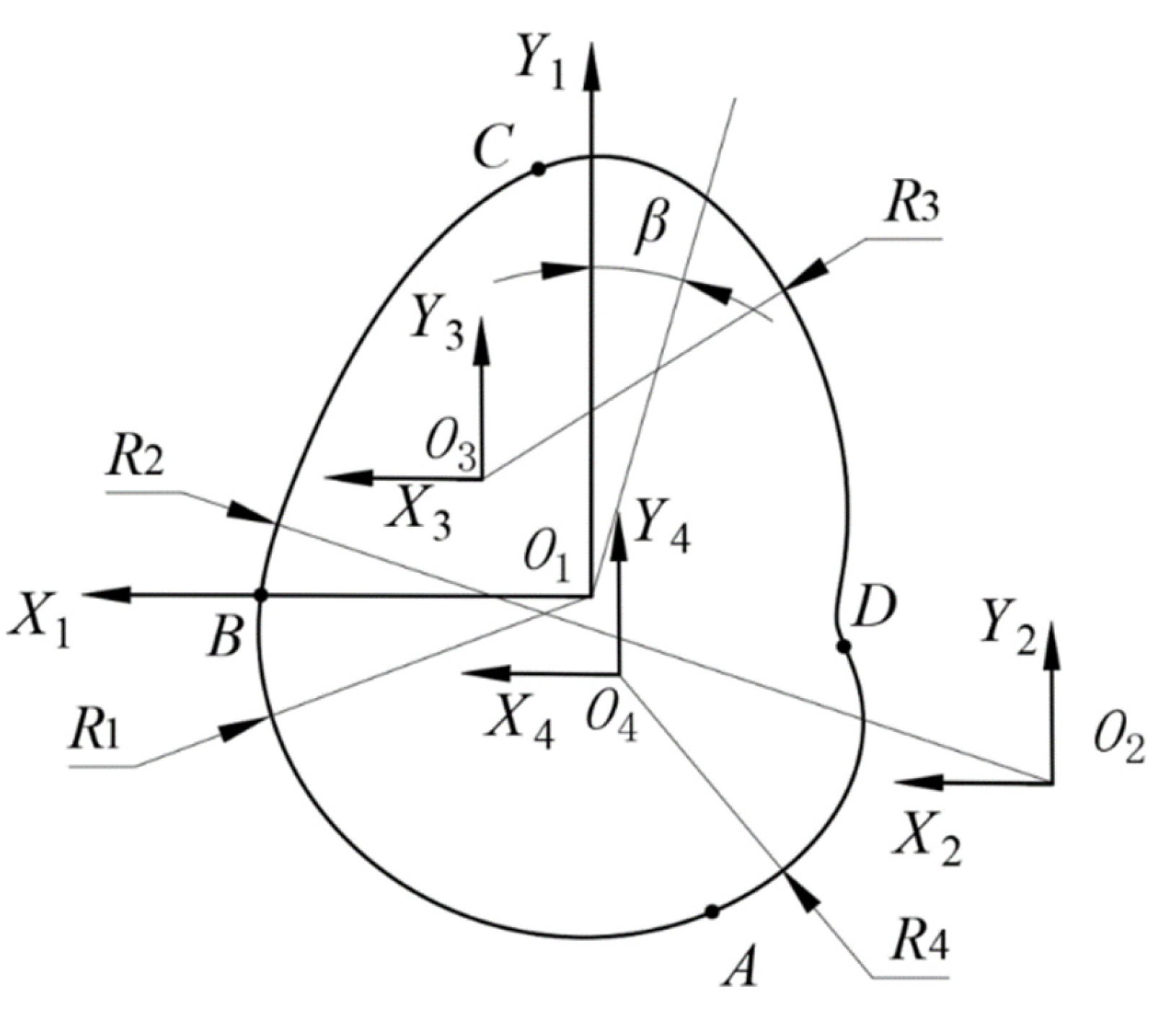
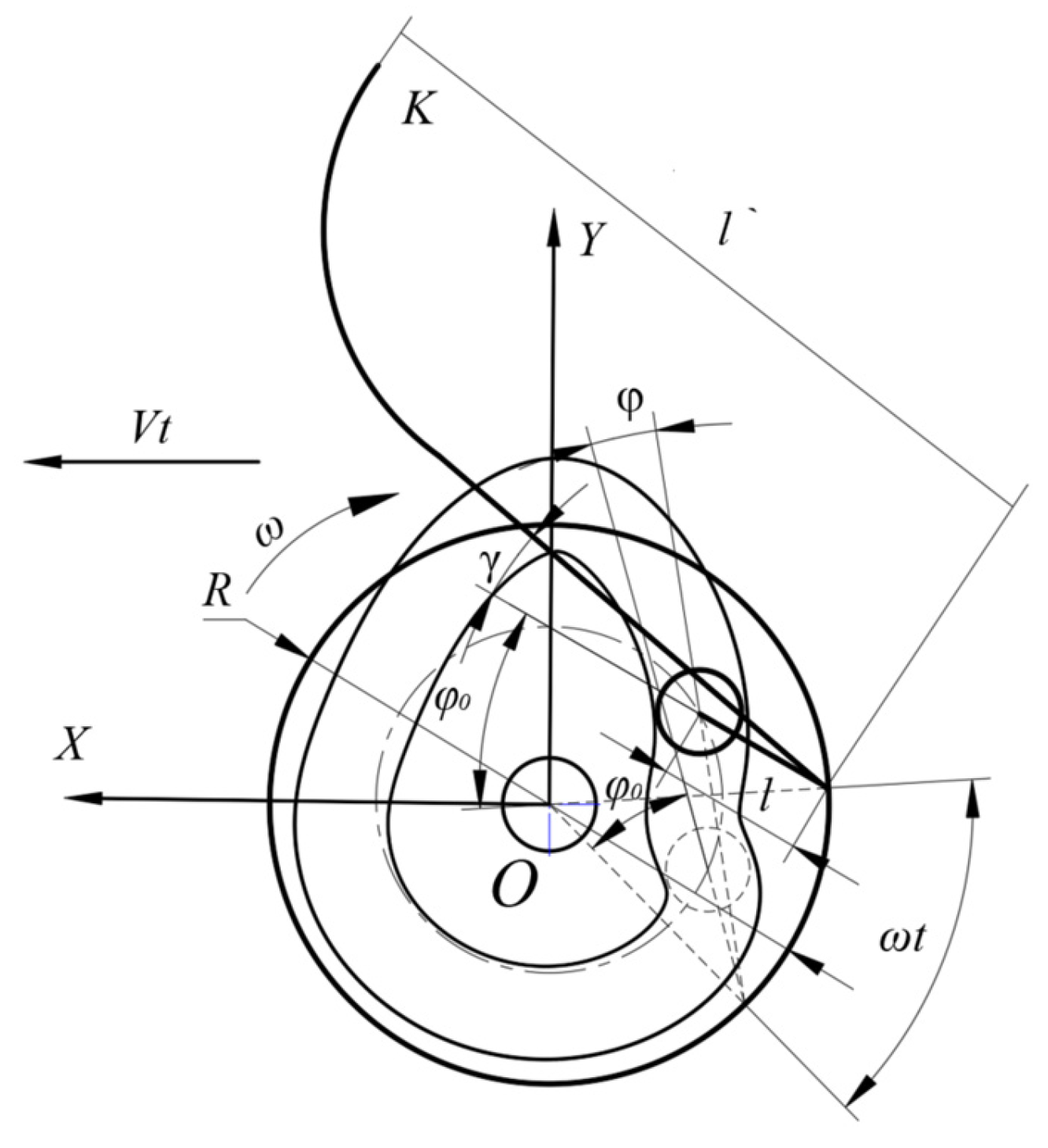
2.3. Analysis of the Principle of Spring-Finger Movement
2.4. Potato Trajectory Simulation Analysis
2.4.1. Simulation Model Building in EDEM
2.4.2. Building a Motion Simulation Model in Adams
2.4.3. ADAMS-EDEM Coupled Analysis Test
2.5. Laboratory Test
2.5.1. Test Conditions
2.5.2. Evaluation Indicators
3. Results and Discussion
3.1. Experimental Scheme and Results
3.2. Analysis of Test Results
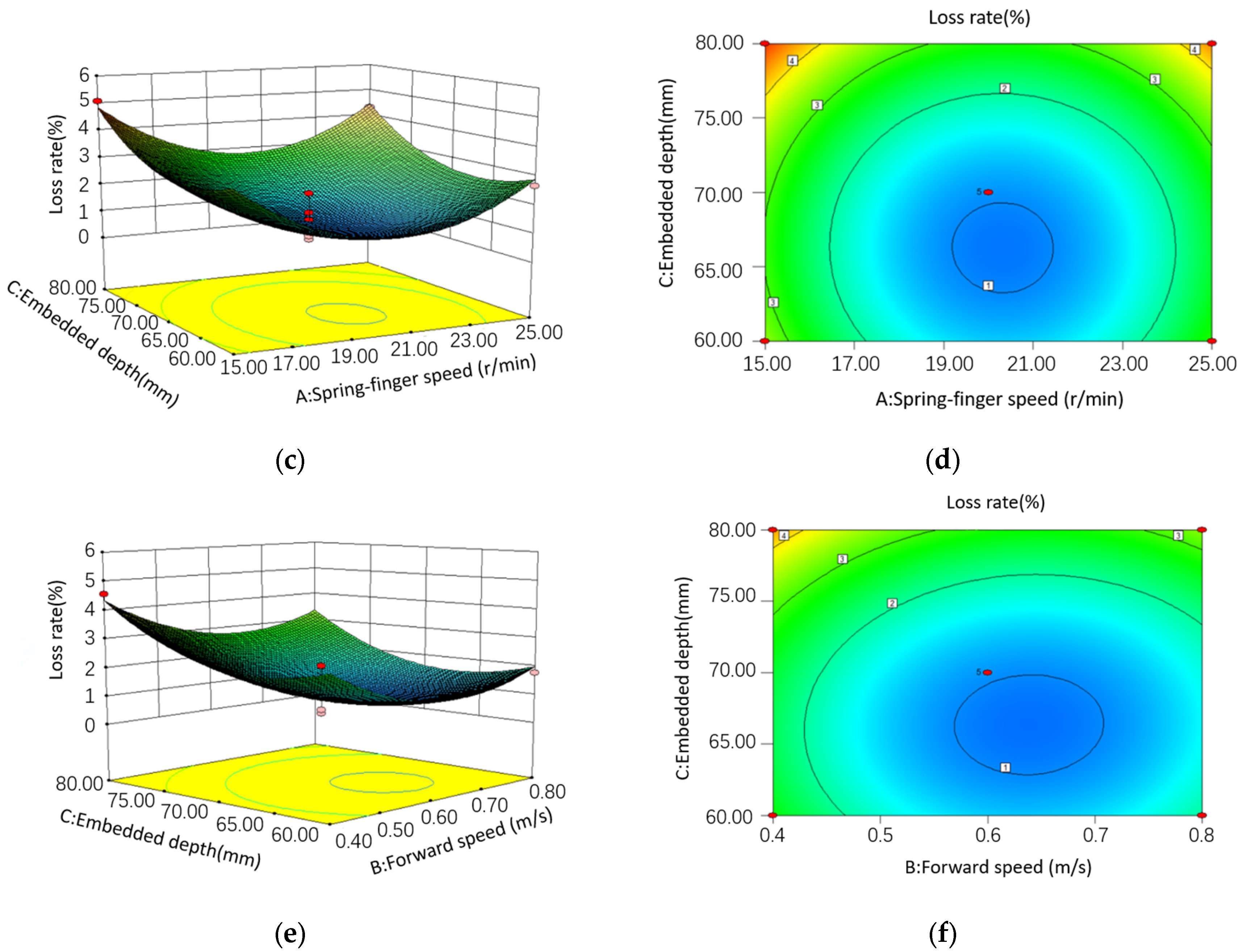
3.3. Response Surface Analysis
3.4. Optimization Model Analysis and Laboratory Test Validation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Mystkowska, I.; Zarzecka, K.; Gugała, M.; Ginter, A.; Sikorska, A.; Dmitrowicz, A. Impact of Care and Nutrition Methods on the Content and Uptake of Selected Mineral Elements in Solanum tuberosum. Agronomy 2023, 13, 690. [Google Scholar] [CrossRef]
- Fan, J.; Li, Y.; Luo, W.; Yang, K.; Yu, Z.; Wang, S.; Hu, Z.; Wang, B.; Gu, F.; Wu, F. An Experimental Study of Stem Transported-Posture Adjustment Mechanism in Potato Harvesting. Agronomy 2023, 13, 234. [Google Scholar] [CrossRef]
- Dou, Q.; Sun, Y.; Sun, Y.; Shen, J.; Li, Q. Domestic and foreign potato harvesting machinery status and development. China Agric. Chem. News 2019, 9, 206–210. [Google Scholar]
- Zhao, Q. Domestic and foreign potato harvesting machinery research status and development prospects. Agric. Eng. 2020, 6, 7–10. [Google Scholar]
- Luo, Q.; Lun, L.; Gao, M. Strategic pathways for high-quality development of China’s potato industry from 2021 to 2025. China Agric. Resour. Zoning 2022, 3, 37–45. [Google Scholar]
- Wei, Z.; Li, X.; Zhang, Y.; Li, H.; Sun, C. Research progress of potato full mechanized production technology and equipment. Agric. Mech. Res. 2017, 9, 1–6. [Google Scholar]
- Shi, Y.; Yan, S.; Zhu, R.; Li, J.; Huang, S.; Liu, Y. Development and experiment of a small potato picker. Arid Reg. Agric. Res. 2016, 4, 287–291+298. [Google Scholar]
- Xiao, W.; Gao, Y.; Chen, H.; Zhang, Y. Design and experiment of small potato picking and grading machine. Agric. Mech. Res. 2019, 12, 130–134. [Google Scholar]
- Hu, Q.; Xiao, W. Design and test of an integrated potato picking and grading harvester. Agric. Mech. Res. 2021, 11, 110–114. [Google Scholar]
- Liu, J.; Wei, M.; Kang, H.; Wang, Y.; Zhou, J. Design and experiment of potato harvester based on roller separation. Agric. Mech. Res. 2021, 5, 96–103. [Google Scholar]
- Wang, W. Experimental Research on Potato Picking Device Based on Discrete Elements. Master’s Thesis, Northwest University of Agriculture and Forestry Science and Technology, Shanxi, China, 2017. [Google Scholar]
- Yang, J.; Li, G.; Hao, L.; Chen, W.; Ye, T. Research on the development status and main function structure of potato picker. Agric. Mach. Use Maint. 2019, 3, 15–16. [Google Scholar]
- Wei, Z.; Wang, X.; Li, X.; Wang, F.; Li, Z.; Jin, C. Design and test of a self-propelled sorting potato harvester with crawler. J. Agric. Mach. 2023, 2, 95–106. [Google Scholar]
- Campbell, A.J.; Birt, I.; MacKinnon, B. Modifications of a potato harvester for small plot field research. Am. Potato J. 1990, 11, 799–803. [Google Scholar]
- Zhang, F.; Qiu, Z.; Mao, P. The model and simulation of the potato harvester. Appl. Mech. Mater. 2011, 44, 900–904. [Google Scholar] [CrossRef]
- Yang, F.; Sun, B.; Zheng, S. Research status and development trend of potato harvesting machine. For. Mach. Woodwork. Equip. 2021, 10, 4–10. [Google Scholar]
- Sheng, K.; Zeng, N. Mechanism characteristics and mathematical model of motion of a spring-tooth roller picker. J. Agric. Mach. 1991, 1, 51–57. [Google Scholar]
- Yang, H.; Hu, Z.; Wang, B. Research progress of potato harvesting mechanization technology. Chin. J. Agric. Mach. Chem. 2019, 11, 27–34. [Google Scholar]
- China Agricultural Machinery Research Institute. Handbook of Agricultural Machinery Design; Machinery Industry Press: Beijing, China, 2007; p. 1056. [Google Scholar]
- Kanafojski, T. Crop-Harvesting Machines; China Agricultural Machinery Press: Beijing, China, 1983; pp. 487–512. [Google Scholar]
- Sun, Y.; Shao, L.; Fan, Z. Experimental study on Poisson’s ratio of non-cohesive soils. Geotechnics 2009, s1, 63–68. [Google Scholar]
- Song, Z.; Li, H.; Yan, Y. Calibration and testing of a discrete element simulation model for non-equal-sized particles in mulberry soils. J. Agric. Mach. 2022, 6, 21–33. [Google Scholar]
- Wang, Y. Research on the Structure and Loosening Effect of Deep Loosening Shovel Based on Discrete Element Method. Master’s Thesis, Jilin Agricultural University, Jilin, China, 2014. [Google Scholar]
- NY/T 648-2015; Technical Specification for Quality Evaluation of Potato Harvesters. China Standard Press: Beijing, China, 2015.
- Chen, K. Experimental Design and Analysis; Tsinghua University Press: Beijing, China, 2005; pp. 123–134. [Google Scholar]
- Pan, L.; Chen, J. Experimental Design and Data Processing; Southeast University Press: Nanjing, China, 2008; pp. 78–86. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Potato Size | Length (mm) | Width (mm) | Thickness (mm) |
|---|---|---|---|
| Maximum value | 149.0 | 100.7 | 85.3 |
| Minimum value | 71.4 | 59.2 | 43.8 |
| Mean value | 97.8 | 77.8 | 60.4 |
| Name | Position X (m) | Position Y (m) | Position Z (m) | Physical Radius (m) |
|---|---|---|---|---|
| sphere 0 | −0.02 | 0 | 0 | 0.03 |
| sphere 1 | 0 | −0.008 | 0 | 0.032 |
| sphere 2 | 0 | 0.008 | 0 | 0.032 |
| sphere 3 | 0.02 | 0 | 0 | 0.03 |
| sphere 4 | 0 | 0 | 0 | 0.033 |
| Parameters | Numerical values |
|---|---|
| Poisson’s ratio | 0.2 |
| Modulus of elasticity | 13.5 MN/m2 |
| Density | 1.38 g/cm3 |
| Coefficient of static friction | 0.81 |
| Coefficient of rolling friction | 0.2095 |
| Resting angle | 35.53° |
| JKR surface energy coefficient | 0.356 |
| Material | Recovery Coefficient | Static Friction Coefficient | Rolling Friction Coefficient |
|---|---|---|---|
| Potato-Potato | 0.13 | 0.2 | 0.01 |
| Potato-Soil | 0.06 | 0.5 | 0.01 |
| Potato-Pickup device | 0.45 | 0.5 | 0.43 |
| Soil-Soil | 0.15 | 0.81 | 0.15 |
| Soil-Pickup device | 0.30 | 0.5 | 0.05 |
| Level | Test Factors | ||
|---|---|---|---|
| Spring-Finger Speed A (r/min) | Forward Speed B (m/s) | Embedded Depth C (mm) | |
| −1 | 15 | 0.4 | 60 |
| 0 | 20 | 0.6 | 70 |
| 1 | 25 | 0.8 | 80 |
| Test Number | Test Factors | Test Indicators | |||
|---|---|---|---|---|---|
| A r/min | B m/s | C mm | Y1 % | Y2 % | |
| 1 | 25 | 0.8 | 70 | 4.34 | 15.75 |
| 2 | 20 | 0.4 | 80 | 4.56 | 13.56 |
| 3 | 15 | 0.4 | 70 | 4.72 | 11.42 |
| 4 | 20 | 0.8 | 60 | 1.77 | 16.95 |
| 5 | 20 | 0.6 | 70 | 0.47 | 6.61 |
| 6 | 20 | 0.8 | 80 | 3.04 | 11.14 |
| 7 | 15 | 0.8 | 70 | 3.16 | 19.14 |
| 8 | 20 | 0.6 | 70 | 0.36 | 7.04 |
| 9 | 25 | 0.6 | 80 | 4.32 | 14.85 |
| 10 | 20 | 0.6 | 70 | 2.04 | 6.36 |
| 11 | 25 | 0.4 | 70 | 3.39 | 21.37 |
| 12 | 20 | 0.6 | 70 | 1.06 | 5.2 |
| 13 | 15 | 0.6 | 80 | 5.07 | 10.08 |
| 14 | 20 | 0.4 | 60 | 3.01 | 19.15 |
| 15 | 20 | 0.6 | 70 | 1.34 | 5.66 |
| 16 | 25 | 0.6 | 60 | 2.66 | 22.19 |
| 17 | 15 | 0.6 | 60 | 3.52 | 15.59 |
| Source of Variance | Loss Rate Y1% | |||||
|---|---|---|---|---|---|---|
| Sum of Squares | Freedom | Mean Square | F-Value | p-Value | Significance | |
| Model | 33.09 | 9 | 3.68 | 9.39 | 0.0037 | ** |
| A | 0.39 | 1 | 0.39 | 0.99 | 0.3531 | |
| B | 1.42 | 1 | 1.42 | 3.63 | 0.0986 | * |
| C | 4.55 | 1 | 4.55 | 11.61 | 0.0113 | |
| AB | 1.58 | 1 | 1.58 | 4.02 | 0.0849 | * |
| AC | 0.003025 | 1 | 0.003025 | 0.007728 | 0.9324 | |
| BC | 0.020 | 1 | 0.020 | 0.050 | 0.8293 | |
| A2 | 13.99 | 1 | 13.99 | 35.75 | 0.0006 | ** |
| B2 | 4.43 | 1 | 4.43 | 11.31 | 0.0120 | |
| C2 | 4.34 | 1 | 4.34 | 11.09 | 0.0126 | |
| residuals | 2.74 | 7 | 0.39 | |||
| fail to fit | 0.86 | 3 | 0.29 | 0.61 | 0.6415 | |
| error | 1.88 | 4 | 0.47 | |||
| total | 35.83 | 16 | ||||
| Source of Variance | Wounded Potato Rate Y2% | |||||
| Sum of Squares | Freedom | Mean Square | F-Value | p-Value | Significance | |
| Model | 502.23 | 9 | 55.80 | 35.55 | <0.0001 | ** |
| A | 40.19 | 1 | 40.19 | 25.60 | 0.0015 | ** |
| B | 0.79 | 1 | 0.79 | 0.51 | 0.5000 | |
| C | 73.51 | 1 | 73.51 | 46.83 | 0.0002 | ** |
| AB | 44.49 | 1 | 44.49 | 28.34 | 0.0011 | ** |
| AC | 0.84 | 1 | 0.84 | 0.53 | 0.4889 | |
| BC | 0.012 | 1 | 0.012 | 0.007709 | 0.9325 | |
| A2 | 132.60 | 1 | 132.60 | 84.48 | <0.0001 | ** |
| B2 | 110.99 | 1 | 110.99 | 70.71 | <0.0001 | ** |
| C2 | 63.77 | 1 | 63.77 | 40.63 | 0.0004 | ** |
| residuals | 10.99 | 7 | 1.57 | |||
| fail to fit | 8.80 | 3 | 2.93 | 5.36 | 0.0692 | |
| error | 2.19 | 4 | 0.55 | |||
| total | 513.22 | 16 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Liu, F.; Wang, Q.; Zhou, J.; Fan, X.; Li, J.; Zhao, X.; Xie, S. Design of a Spring-Finger Potato Picker and an Experimental Study of Its Picking Performance. Agriculture 2023, 13, 945. https://doi.org/10.3390/agriculture13050945
Wang L, Liu F, Wang Q, Zhou J, Fan X, Li J, Zhao X, Xie S. Design of a Spring-Finger Potato Picker and an Experimental Study of Its Picking Performance. Agriculture. 2023; 13(5):945. https://doi.org/10.3390/agriculture13050945
Chicago/Turabian StyleWang, Lihe, Fei Liu, Qiang Wang, Jiaqi Zhou, Xiaoyu Fan, Junru Li, Xuan Zhao, and Shengshi Xie. 2023. "Design of a Spring-Finger Potato Picker and an Experimental Study of Its Picking Performance" Agriculture 13, no. 5: 945. https://doi.org/10.3390/agriculture13050945
APA StyleWang, L., Liu, F., Wang, Q., Zhou, J., Fan, X., Li, J., Zhao, X., & Xie, S. (2023). Design of a Spring-Finger Potato Picker and an Experimental Study of Its Picking Performance. Agriculture, 13(5), 945. https://doi.org/10.3390/agriculture13050945