
An Apple Detection and Localization Method for Automated Harvesting under Adverse Light Conditions


Abstract
:1. Introduction
2. Materials and Methods
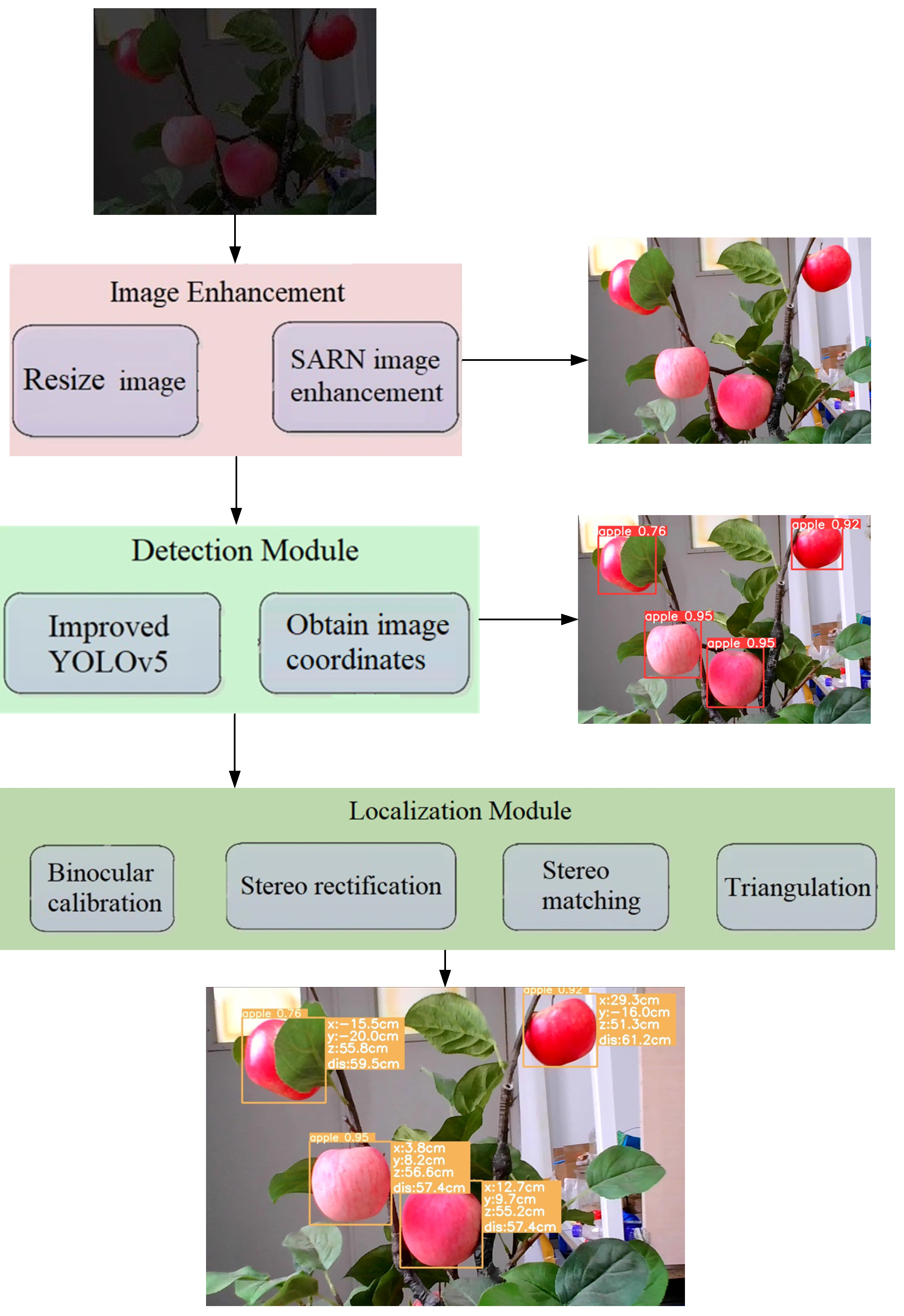
2.1. System Framework
2.2. Image Enhancement Network
2.3. YOLOv5 Model
2.4. Improvements to the YOLOv5
2.4.1. Insertion Attention Mechanisms
2.4.2. Improvement of the Loss Function
2.5. Picking Point Localization Based on Binocular Stereo Vision
2.6. Implementation Details
2.7. Datasets
2.8. Network Training
2.9. Evaluation Metrics
3. Results
3.1. Ablation Experiments
3.2. Apple Detection Performance
3.3. Apple Localization Performance
3.3.1. Binocular Camera Calibration
3.3.2. Localization Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Fróna, D.; Szenderák, J.; Harangi-Rákos, M. The challenge of feeding the world. Sustainability 2019, 11, 5816. [Google Scholar] [CrossRef]
- Rockström, J.; Williams, J.; Daily, G.; Noble, A.; Matthews, N.; Gordon, L.; Wetterstrand, H.; DeClerck, F.; Shah, M.; Steduto, P.; et al. Sustainable intensification of agriculture for human prosperity and global sustainability. Ambio 2017, 46, 4–17. [Google Scholar] [CrossRef]
- Tzounis, A.; Katsoulas, N.; Bartzanas, T.; Kittas, C. Internet of Things in agriculture, recent advances and future challenges. Biosyst. Eng. 2017, 164, 31–48. [Google Scholar] [CrossRef]
- Musacchi, S.; Serra, S. Apple fruit quality: Overview on pre-harvest factors. Sci. Hortic. 2018, 234, 409–430. [Google Scholar] [CrossRef]
- Bogue, R. Fruit picking robots: Has their time come? Ind. Robot Int. J. Robot. Res. Appl. 2020, 47, 141–145. [Google Scholar] [CrossRef]
- Legun, K.; Burch, K. Robot-ready: How apple producers are assembling in anticipation of new AI robotics. J. Rural Stud. 2021, 82, 380–390. [Google Scholar] [CrossRef]
- Jia, W.; Zhang, Y.; Lian, J.; Zheng, Y.; Zhao, D.; Li, C. Apple harvesting robot under information technology: A review. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420925310. [Google Scholar] [CrossRef]
- Shamshiri, R.R.; Weltzien, C.; Hameed, I.A.; Yule, I.J.; Grift, T.E.; Balasundram, S.K.; Pitonakova, L.; Ahmad, D.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 1–14. [Google Scholar] [CrossRef]
- Wan, S.; Goudos, S. Faster R-CNN for multi-class fruit detection using a robotic vision system. Comput. Netw. 2020, 168, 107036. [Google Scholar] [CrossRef]
- Jiao, Y.; Luo, R.; Li, Q.; Deng, X.; Yin, X.; Jia, W. Detection and localization of overlapped fruits application in an apple harvesting robot. Electronics 2020, 9, 1023. [Google Scholar] [CrossRef]
- Sigov, A.; Ratkin, L.; Ivanov, L.A.; Xu, L.D. Emerging enabling technologies for industry 4.0 and beyond. Inf. Syst. Front. 2022, 1–11. [Google Scholar] [CrossRef]
- Zennayi, Y.; Benaissa, S.; Derrouz, H.; Guennoun, Z. Unauthorized access detection system to the equipments in a room based on the persons identification by face recognition. Eng. Appl. Artif. Intell. 2023, 124, 106637. [Google Scholar] [CrossRef]
- Zhu, H.; Han, T.; Alhajyaseen, W.K.M.; Iryo-Asano, M.; Nakamura, H. Can automated driving prevent crashes with distracted Pedestrians? An exploration of motion planning at unsignalized Mid-block crosswalks. Accid. Anal. Prev. 2022, 173, 106711. [Google Scholar] [CrossRef]
- De Araujo PR, M.; Lins, R.G. Cloud-based approach for automatic CNC workpiece origin localization based on image analysis. Robot. Comput. Integr. Manuf. 2021, 68, 102090. [Google Scholar] [CrossRef]
- Mao, M.; Zhao, H.; Tang, G.; Ren, J. In-Season Crop Type Detection by Combing Sentinel-1A and Sentinel-2 Imagery Based on the CNN Model. Agronomy 2023, 13, 1723. [Google Scholar] [CrossRef]
- Diwan, T.; Anirudh, G.; Tembhurne, J.V. Object detection using YOLO: Challenges, architectural successors, datasets and applications. Multimed. Tools Appl. 2023, 82, 9243–9275. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Proceedings, Part I 14. Springer International Publishing: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 1137–1149. [Google Scholar] [CrossRef]
- Liu, F.; Hua, Z.; Li, J.; Fan, L. Dual UNet low-light image enhancement network based on attention mechanism. Multimed. Tools Appl. 2023, 82, 24707–24742. [Google Scholar] [CrossRef]
- Wei, C.; Wang, W.; Yang, W.; Liu, J. Deep retinex decomposition for low-light enhancement. arXiv 2018. [Google Scholar] [CrossRef]
- Guo, C.; Li, C.; Guo, J.; Loy, C.C.; Hou, J.; Kwong, S.; Cong, R. Zero-reference deep curve estimation for low-light image enhancement. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 1780–1789. [Google Scholar]
- Lv, F.; Lu, F.; Wu, J.; Lim, C. MBLLEN: Low-Light Image/Video Enhancement Using CNNs. BMVC 2018, 220, 4. [Google Scholar]
- Zhang, Y.; Zhang, J.; Guo, X. Kindling the darkness: A practical low-light image enhancer. In Proceedings of the 27th ACM International Conference on Multimedia, Nice, France, 21–25 October 2019; pp. 1632–1640. [Google Scholar] [CrossRef]
- Wei, X.; Zhang, X.; Li, Y. Tsn-ca: A two-stage network with channel attention for low-light image enhancement. In Proceedings of the International Conference on Artificial Neural Networks, Bristol, UK, 6–9 September 2022; Springer Nature: Cham, Switzerland, 2022; pp. 286–298. [Google Scholar] [CrossRef]
- Wang, J.; Tan, W.; Niu, X.; Yan, B. RDGAN: Retinex decomposition based adversarial learning for low-light enhancement. In Proceedings of the 2019 IEEE International Conference on Multimedia and Expo (ICME), Shanghai, China, 8–12 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1186–1191. [Google Scholar] [CrossRef]
- Wei, X.; Zhang, X.; Li, Y. Sarn: A lightweight stacked attention residual network for low-light image enhancement. In Proceedings of the 2021 6th International Conference on Robotics and Automation Engineering (ICRAE), Guangzhou, China, 19–22 November 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 275–279. [Google Scholar]
- Thuan, D. Evolution of Yolo Algorithm and Yolov5: The State-of-the-Art Object Detention Algorithm. Bachelor’s Thesis, Oulu University of Applied Sciences, Oulu, Finland, 2021. [Google Scholar]
- Deng, L.; Li, H.; Liu, H.; Gu, J. A lightweight YOLOv3 algorithm used for safety helmet detection. Sci. Rep. 2022, 12, 10981. [Google Scholar] [CrossRef] [PubMed]
- Cheng, D.; Meng, G.; Cheng, G.; Pan, C. SeNet: Structured edge network for sea–land segmentation. IEEE Geosci. Remote Sens. Lett. 2016, 14, 247–251. [Google Scholar] [CrossRef]
- Imambi, S.; Prakash, K.B.; Kanagachidambaresan, G.R. PyTorch. Programming with TensorFlow: Solution for Edge Computing Applications; Springer Nature: Cham, Switzerland, 2021; pp. 87–104. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SARN | SE | EIOU | P | R | mAP |
|---|---|---|---|---|---|
| × | × | × | 0.852 | 0.802 | 0.853 |
| √ | × | × | 0.882 | 0.836 | 0.885 |
| × | √ | × | 0.861 | 0.817 | 0.867 |
| × | × | √ | 0.858 | 0.813 | 0.863 |
| √ | √ | √ | 0.897 | 0.851 | 0.903 |
| Model | Normal Light | Overexposure | Adverse Light | Inference Time (ms) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| P | R | mAP | P | R | mAP | P | R | mAP | ||
| YOLOV5s | 0.958 | 0.934 | 0.941 | 0.731 | 0.692 | 0.714 | 0.852 | 0.770 | 0.851 | 83 |
| RDGAN + YOLOv5s | 0.922 | 0.894 | 0.907 | 0.742 | 0.709 | 0.752 | 0.887 | 0.854 | 0.879 | 256 |
| Zero-DCE + YOLOv5s | 0.912 | 0.893 | 0.897 | 0.747 | 0.734 | 0.745 | 0.875 | 0.791 | 0.856 | 198 |
| Ours | 0.977 | 0.951 | 0.972 | 0.794 | 0.756 | 0.782 | 0.954 | 0.910 | 0.960 | 102 |
| Camera | k1 | k2 | k3 | p1 | p2 | p3 |
|---|---|---|---|---|---|---|
| Left | −0.06513102 | 0.30793057 | 0.00122804 | −0.00045881 | −0.41170792 | −0.06513102 |
| Right | 0.032415219 | 0.128195917 | 0.00040042 | 0.00104828 | 0.06010414 | −0.03241521 |
| Model | Normal Light | Adverse Light |
|---|---|---|
| Mean Error (cm) | Mean Error (cm) | |
| YOLOV5s + localization | 0.57 | 2.38 |
| Ours | 0.32 | 0.65 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Tian, Y.; Yin, W.; Zheng, C. An Apple Detection and Localization Method for Automated Harvesting under Adverse Light Conditions. Agriculture 2024, 14, 485. https://doi.org/10.3390/agriculture14030485
Zhang G, Tian Y, Yin W, Zheng C. An Apple Detection and Localization Method for Automated Harvesting under Adverse Light Conditions. Agriculture. 2024; 14(3):485. https://doi.org/10.3390/agriculture14030485
Chicago/Turabian StyleZhang, Guoyu, Ye Tian, Wenhan Yin, and Change Zheng. 2024. "An Apple Detection and Localization Method for Automated Harvesting under Adverse Light Conditions" Agriculture 14, no. 3: 485. https://doi.org/10.3390/agriculture14030485
APA StyleZhang, G., Tian, Y., Yin, W., & Zheng, C. (2024). An Apple Detection and Localization Method for Automated Harvesting under Adverse Light Conditions. Agriculture, 14(3), 485. https://doi.org/10.3390/agriculture14030485