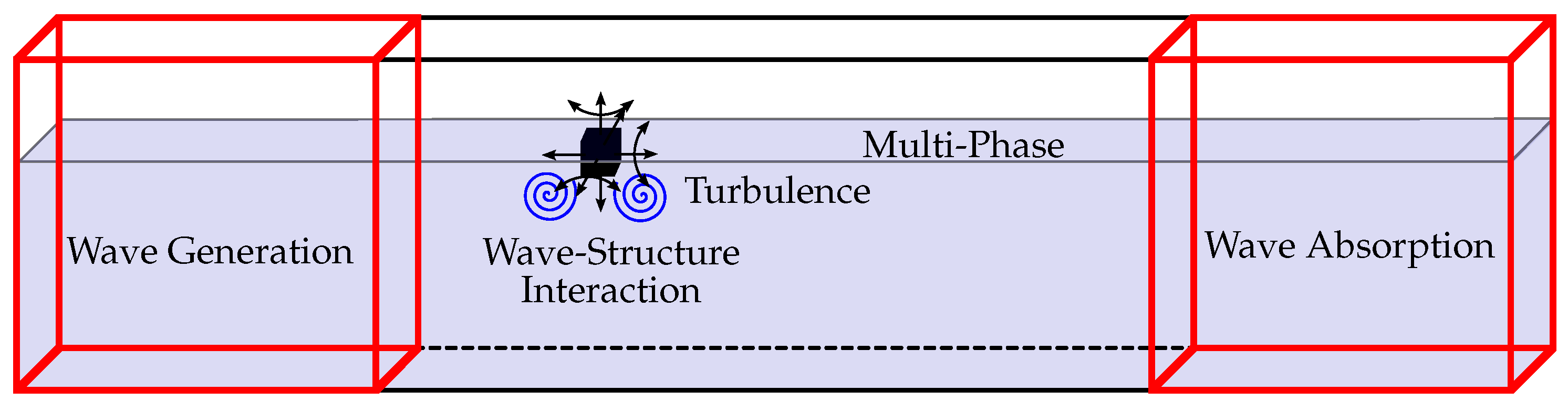
Figure 1.
Generic CFD-based numerical wave tank schematic, depicting the main features to be included in the numerical model.
Figure 1.
Generic CFD-based numerical wave tank schematic, depicting the main features to be included in the numerical model.
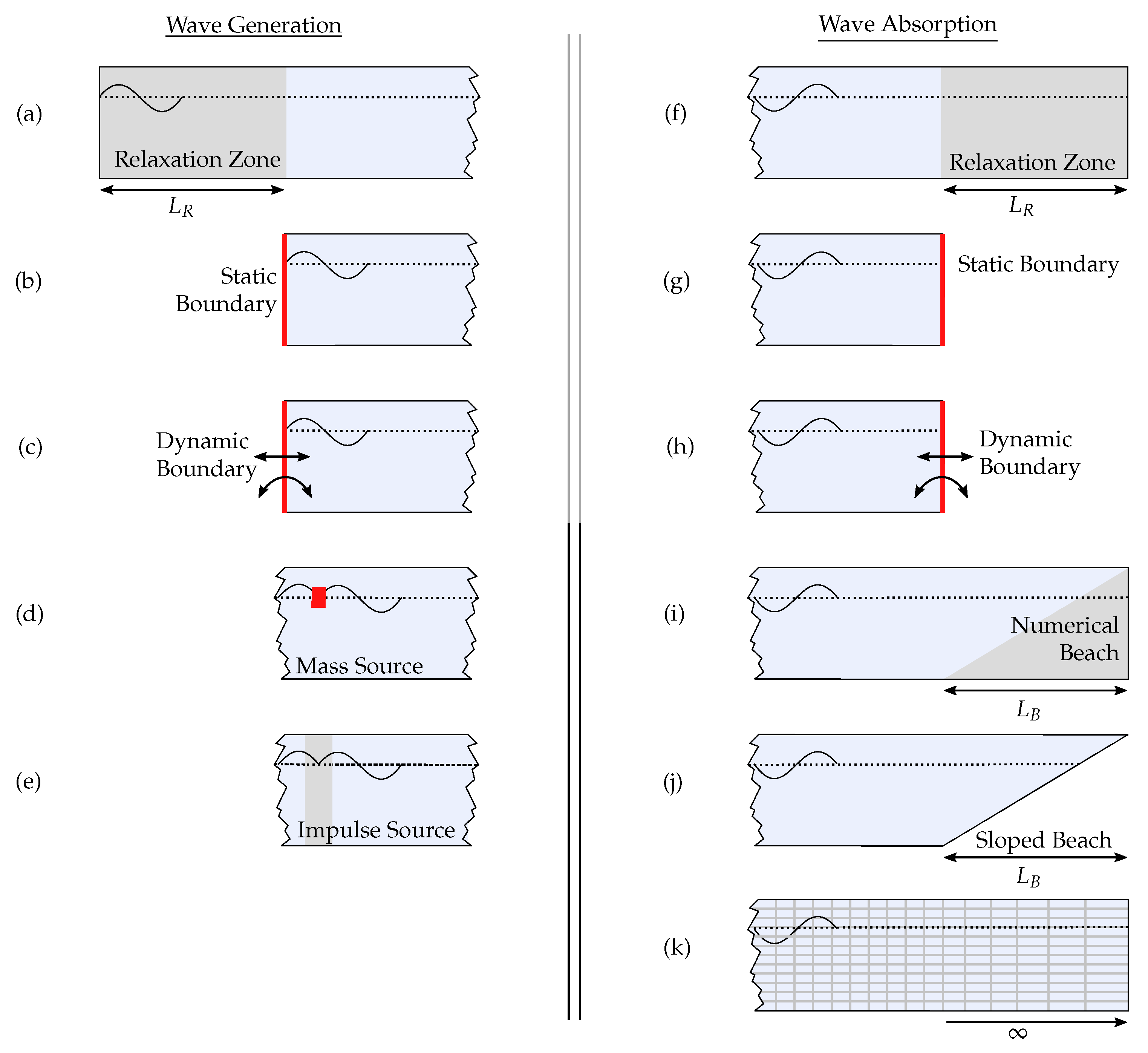
Figure 2.
Schematic representation of available NWM methodologies for wave generation (a–e) and wave absorption (f–k): (a,f) relaxation zone method; (b,g) static boundary method; (c,h) dynamic boundary method; (d) mass source method; (e) impulse source method; (i) numerical beach; (j) geometrical sloped beach; and (k) cell stretching.
Figure 2.
Schematic representation of available NWM methodologies for wave generation (a–e) and wave absorption (f–k): (a,f) relaxation zone method; (b,g) static boundary method; (c,h) dynamic boundary method; (d) mass source method; (e) impulse source method; (i) numerical beach; (j) geometrical sloped beach; and (k) cell stretching.
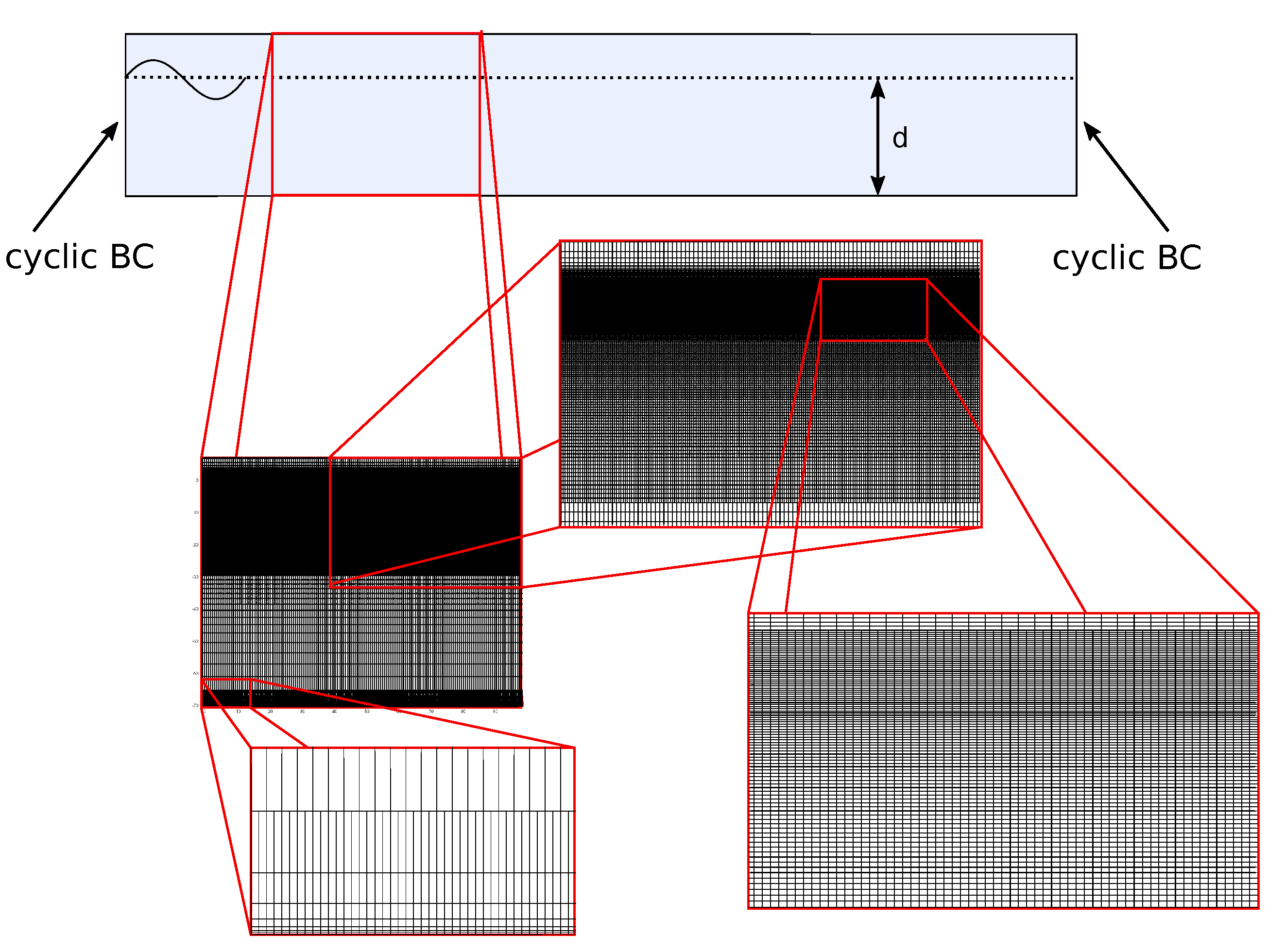
Figure 3.
Generalised domain layout of length and cyclic boundary conditions for the wave propagation test case.
Figure 3.
Generalised domain layout of length and cyclic boundary conditions for the wave propagation test case.
Figure 4.
Generalised domain layout For the assessment of wave generation accuracy: A simulation zone of length is used. Depending on the specific test case and NWM, the length of the upwave (UExt) and downwave (DExt) extension may vary.
Figure 4.
Generalised domain layout For the assessment of wave generation accuracy: A simulation zone of length is used. Depending on the specific test case and NWM, the length of the upwave (UExt) and downwave (DExt) extension may vary.
Figure 5.
Generalised domain layout for the assessment of wave absorption at the wave generator with a fully reflective wall at the downwave domain boundary. Depending on the NWM, the length of the upwave (UExt) extension may vary.
Figure 5.
Generalised domain layout for the assessment of wave absorption at the wave generator with a fully reflective wall at the downwave domain boundary. Depending on the NWM, the length of the upwave (UExt) extension may vary.
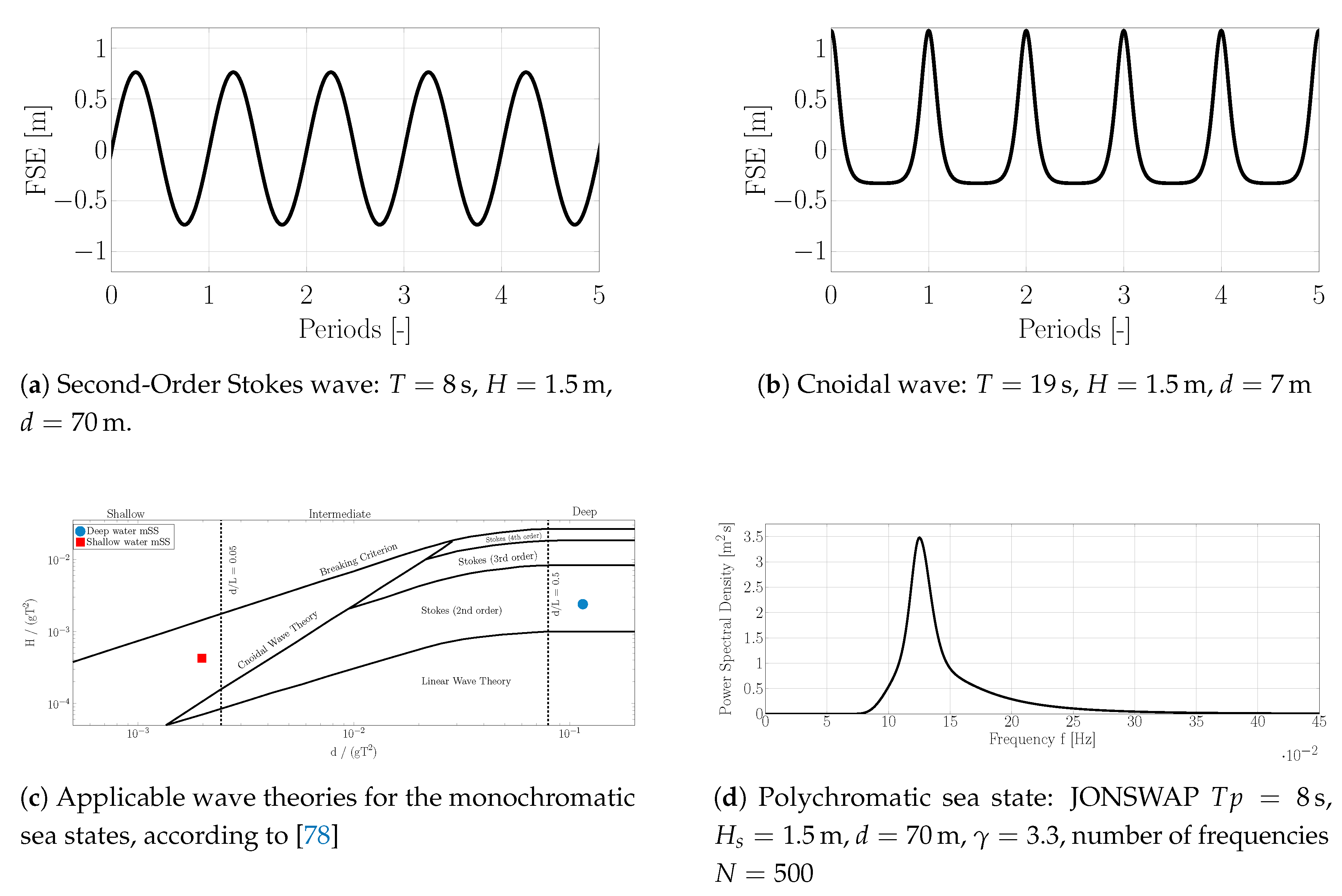
Figure 6.
Theoretical time traces for the deep water mSS (a); shallow water mSS (b); location of the mSSs in the wave theory map (c); and the power spectral density distribution for the pSS (d).
Figure 6.
Theoretical time traces for the deep water mSS (a); shallow water mSS (b); location of the mSSs in the wave theory map (c); and the power spectral density distribution for the pSS (d).
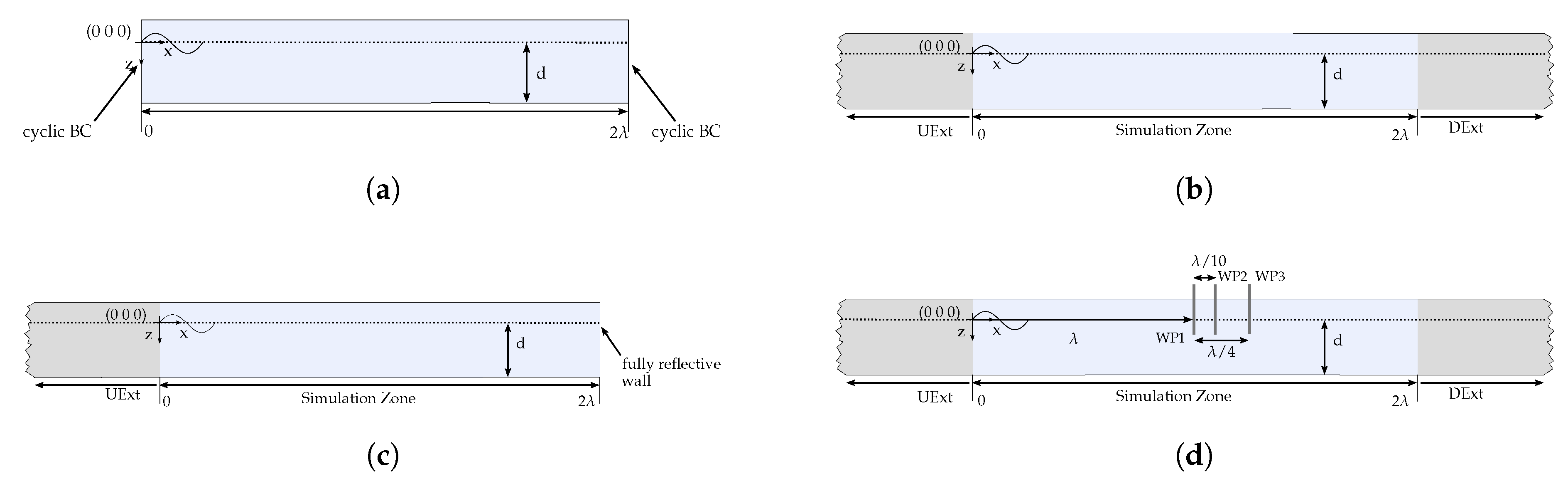
Figure 7.
Domain layouts for the different test cases considered in the illustrative example. (a) Wave propagation test case: A simulation zone of length was used. (b) Assessment of wave generation accuracy: A simulation zone of length was used. Depending on the NWM, the length of the UExt may vary. The DExt was set to and for the mSSs and pSS, respectively. (c) Assessment of wave absorption at the wave generator with a fully reflective wall at the downwave domain boundary. Depending on the NWM, the UExt may vary. (d) Assessment of wave absorption accuracy: A simulation zone of length ess used. Depending on the specific test case and NWM, the length of the UExt and DExt extension may vary.
Figure 7.
Domain layouts for the different test cases considered in the illustrative example. (a) Wave propagation test case: A simulation zone of length was used. (b) Assessment of wave generation accuracy: A simulation zone of length was used. Depending on the NWM, the length of the UExt may vary. The DExt was set to and for the mSSs and pSS, respectively. (c) Assessment of wave absorption at the wave generator with a fully reflective wall at the downwave domain boundary. Depending on the NWM, the UExt may vary. (d) Assessment of wave absorption accuracy: A simulation zone of length ess used. Depending on the specific test case and NWM, the length of the UExt and DExt extension may vary.
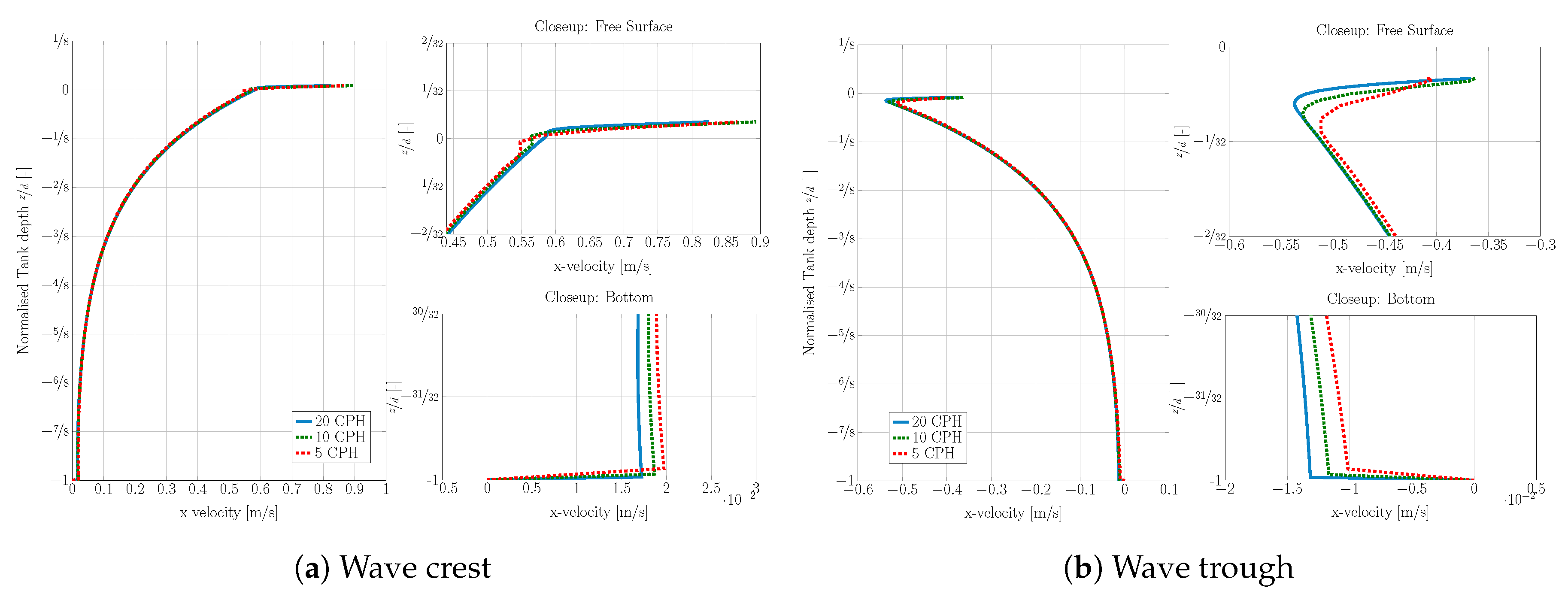
Figure 8.
Velocity profiles extracted along the tank depth for the wave crest (a) and trough (b) for three different discretisation sizes.
Figure 8.
Velocity profiles extracted along the tank depth for the wave crest (a) and trough (b) for three different discretisation sizes.
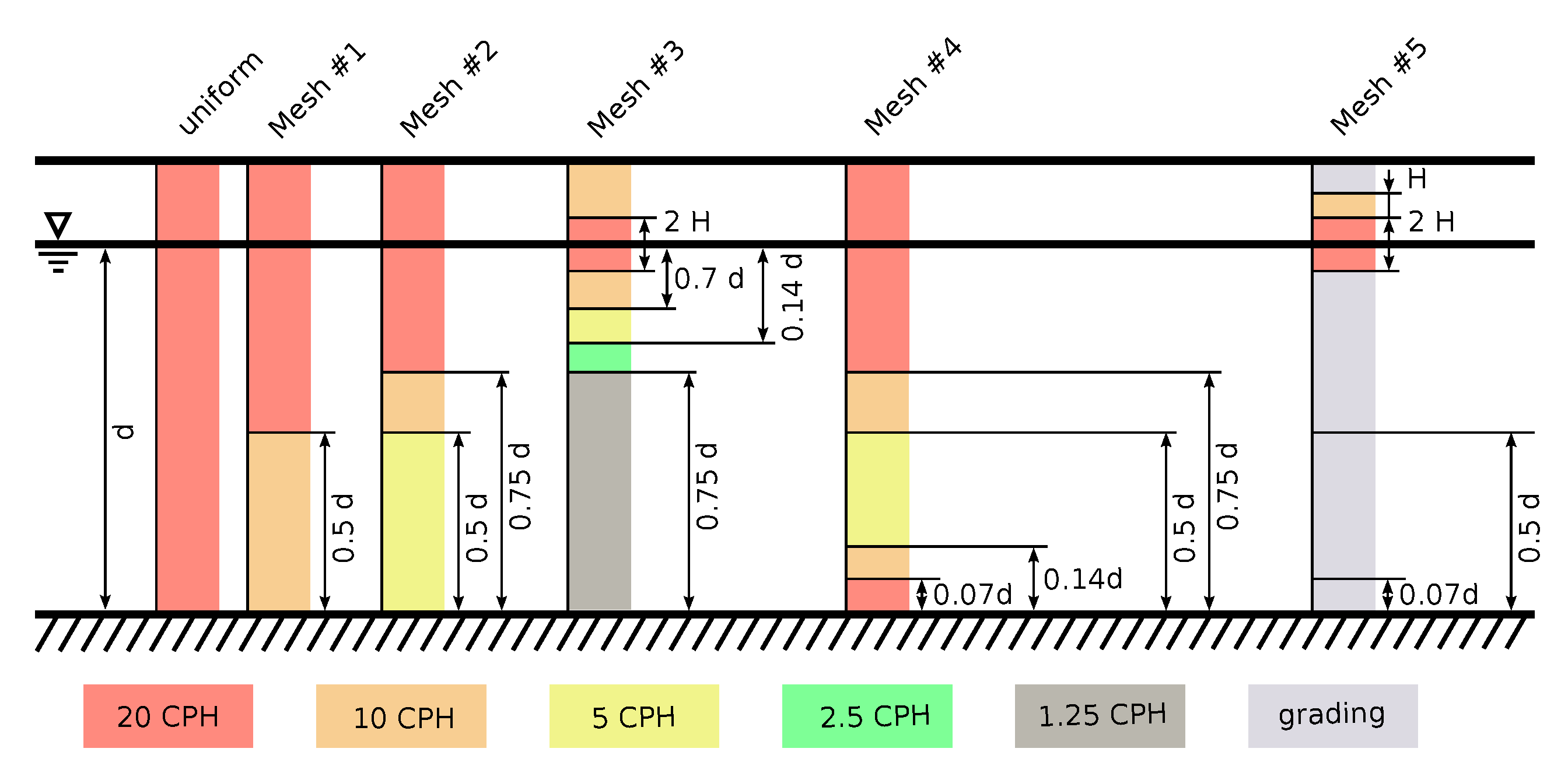
Figure 9.
Examples of different meshes using varying refinement layers along the water column: Different colours mark different mesh sizes, parameterised by the wave height (Schematic not at scale).
Figure 9.
Examples of different meshes using varying refinement layers along the water column: Different colours mark different mesh sizes, parameterised by the wave height (Schematic not at scale).
Figure 10.
Screenshot of the final spatial discretisation of the CNWT with mesh layout #5.
Figure 10.
Screenshot of the final spatial discretisation of the CNWT with mesh layout #5.
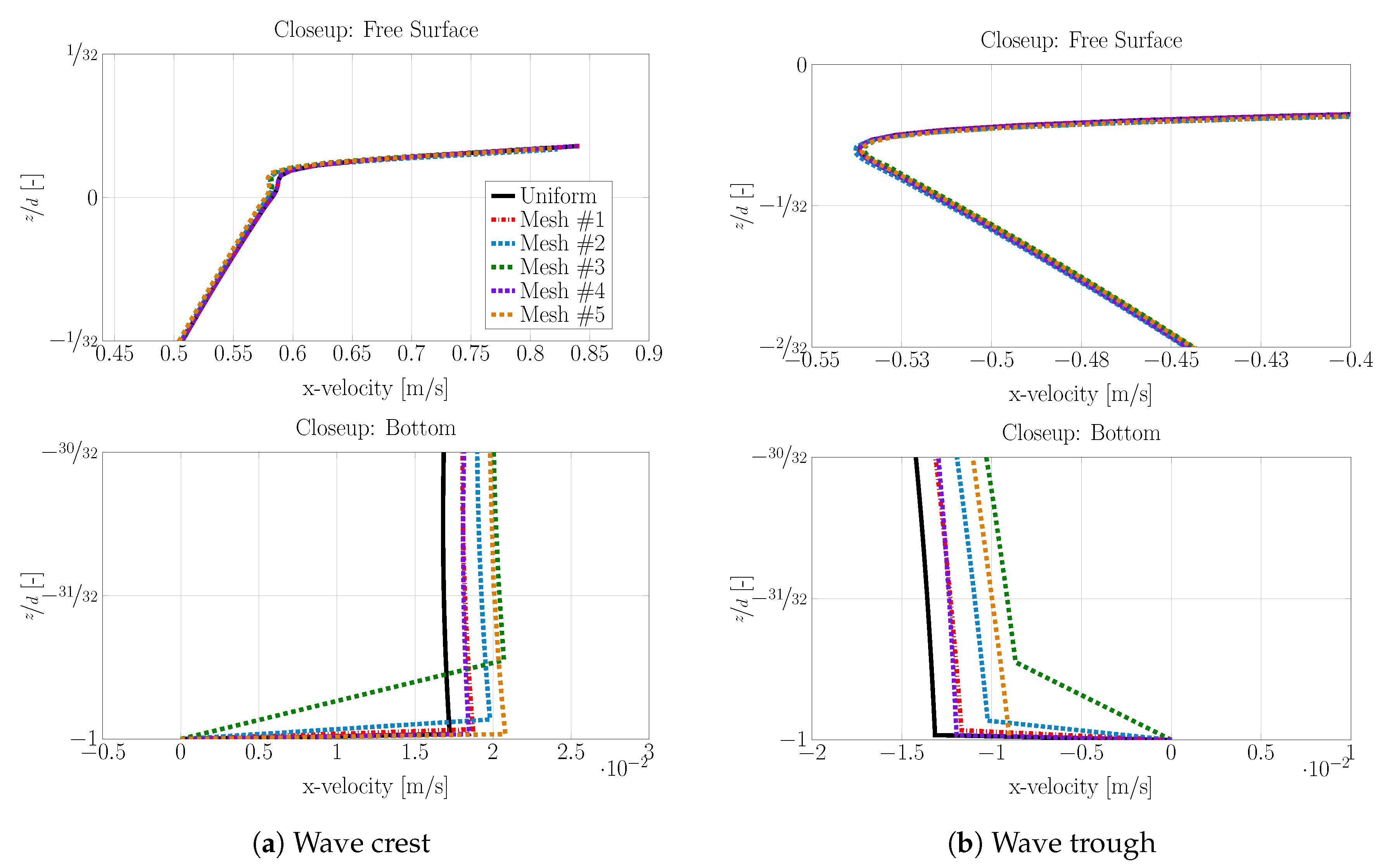
Figure 11.
Velocity profiles extracted along the tank depth for the wave crest (
a) and trough (
b) for different meshes using varying refinement layers along the water column according to
Figure 9.
Figure 11.
Velocity profiles extracted along the tank depth for the wave crest (
a) and trough (
b) for different meshes using varying refinement layers along the water column according to
Figure 9.
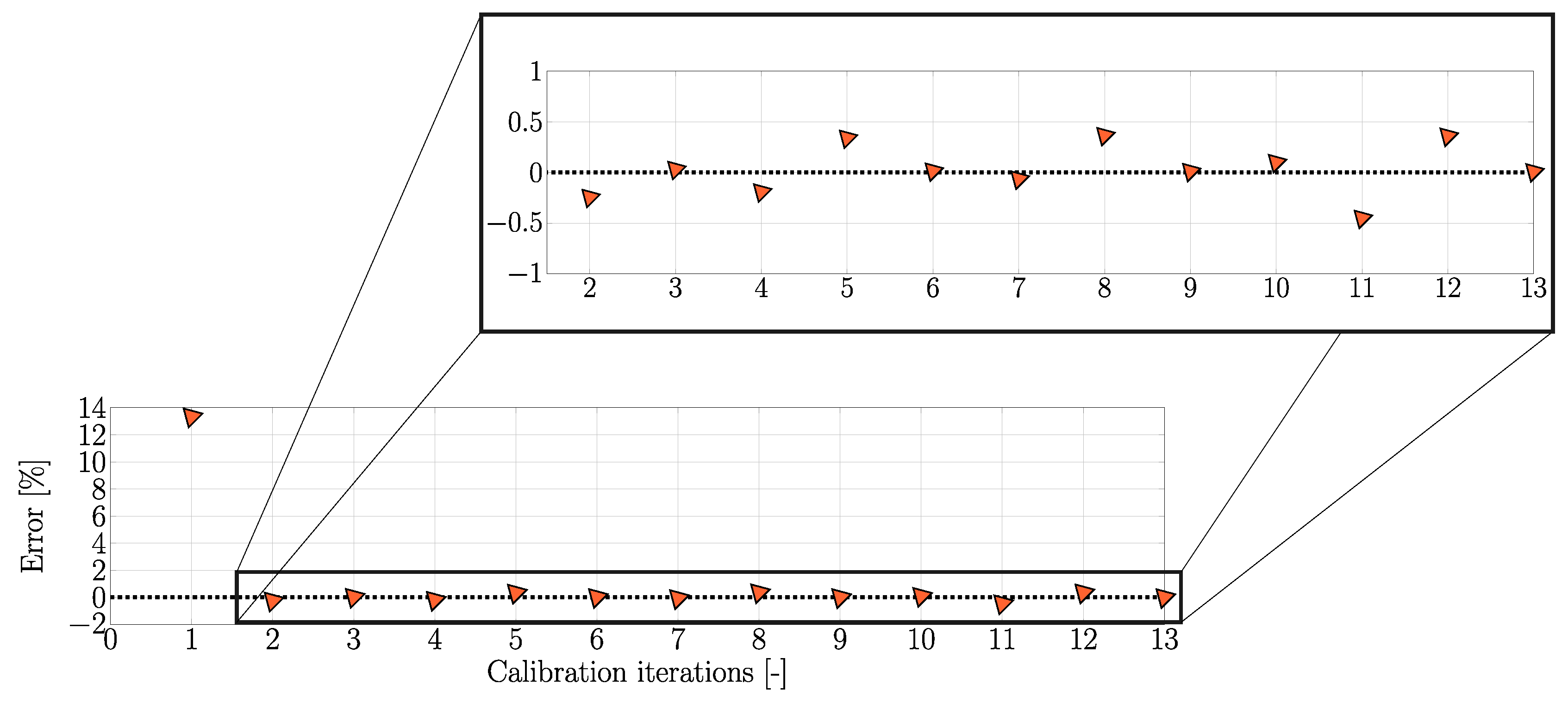
Figure 12.
Relative deviation of measured wave height to target wave height over consecutive wave periods. Results are extracted using a single wave probe, i.e., OFWP.
Figure 12.
Relative deviation of measured wave height to target wave height over consecutive wave periods. Results are extracted using a single wave probe, i.e., OFWP.
Figure 13.
Relative deviation of measured wave height to target wave height over consecutive wave periods for the three different wave probes.
Figure 13.
Relative deviation of measured wave height to target wave height over consecutive wave periods for the three different wave probes.
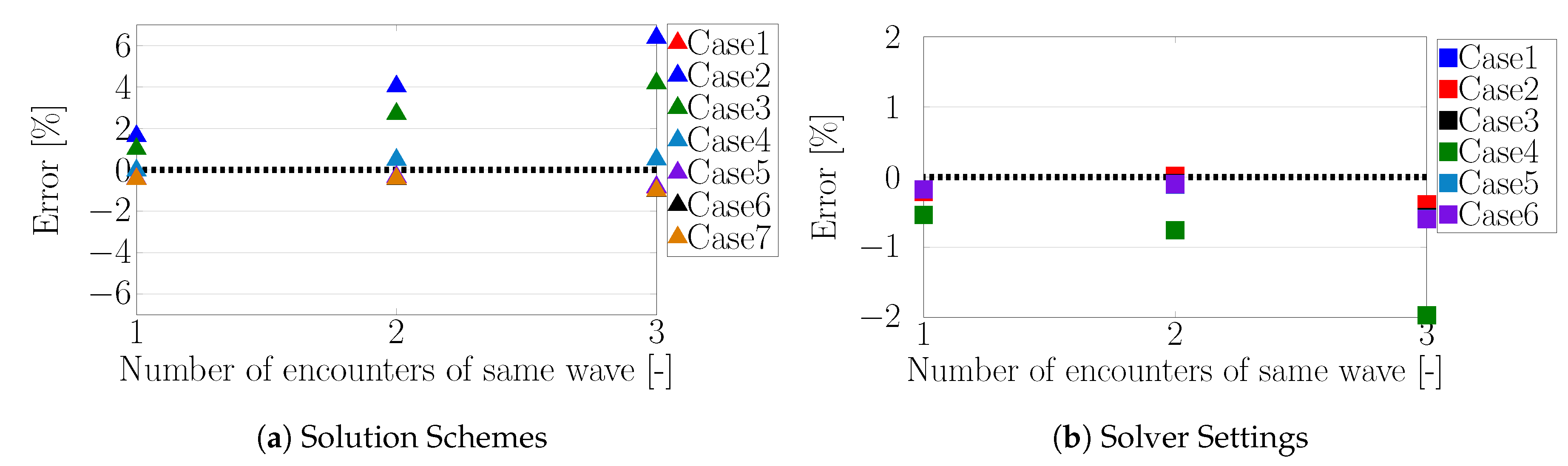
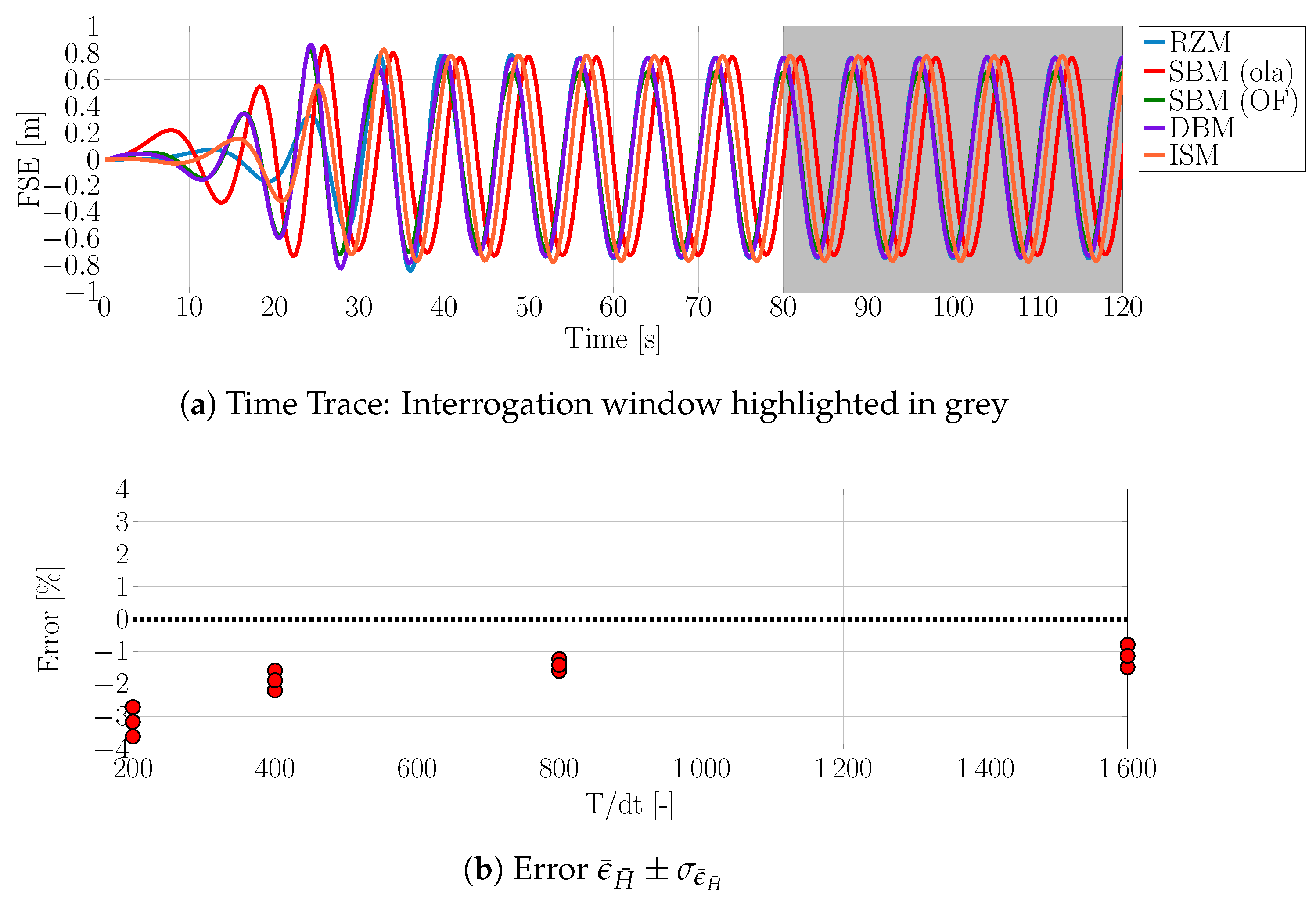
Figure 14.
Example plots of the free surface elevation time traces for different NWMs (a) and the time step sensitivity on the error (b) for the SBM using the olaFlow toolbox. For brevity, results are only shown for the OFWP.
Figure 14.
Example plots of the free surface elevation time traces for different NWMs (a) and the time step sensitivity on the error (b) for the SBM using the olaFlow toolbox. For brevity, results are only shown for the OFWP.
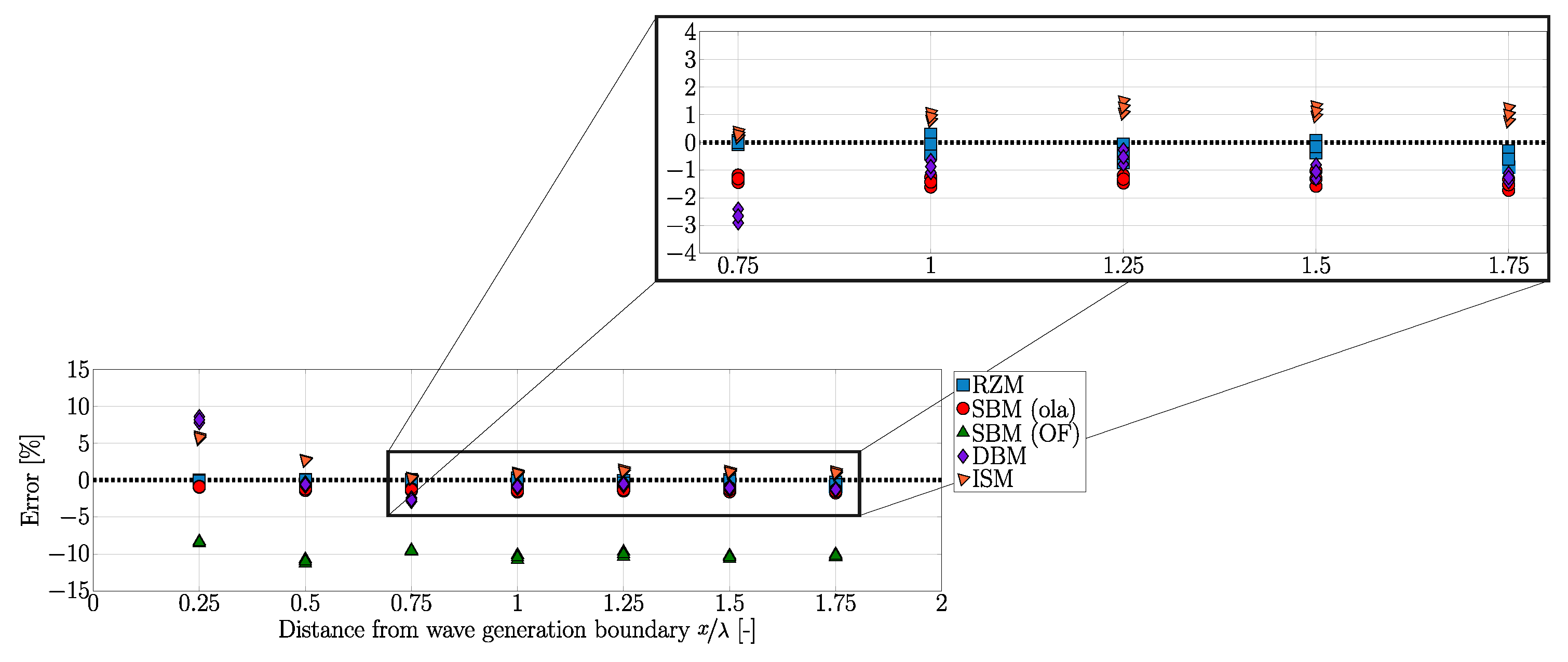
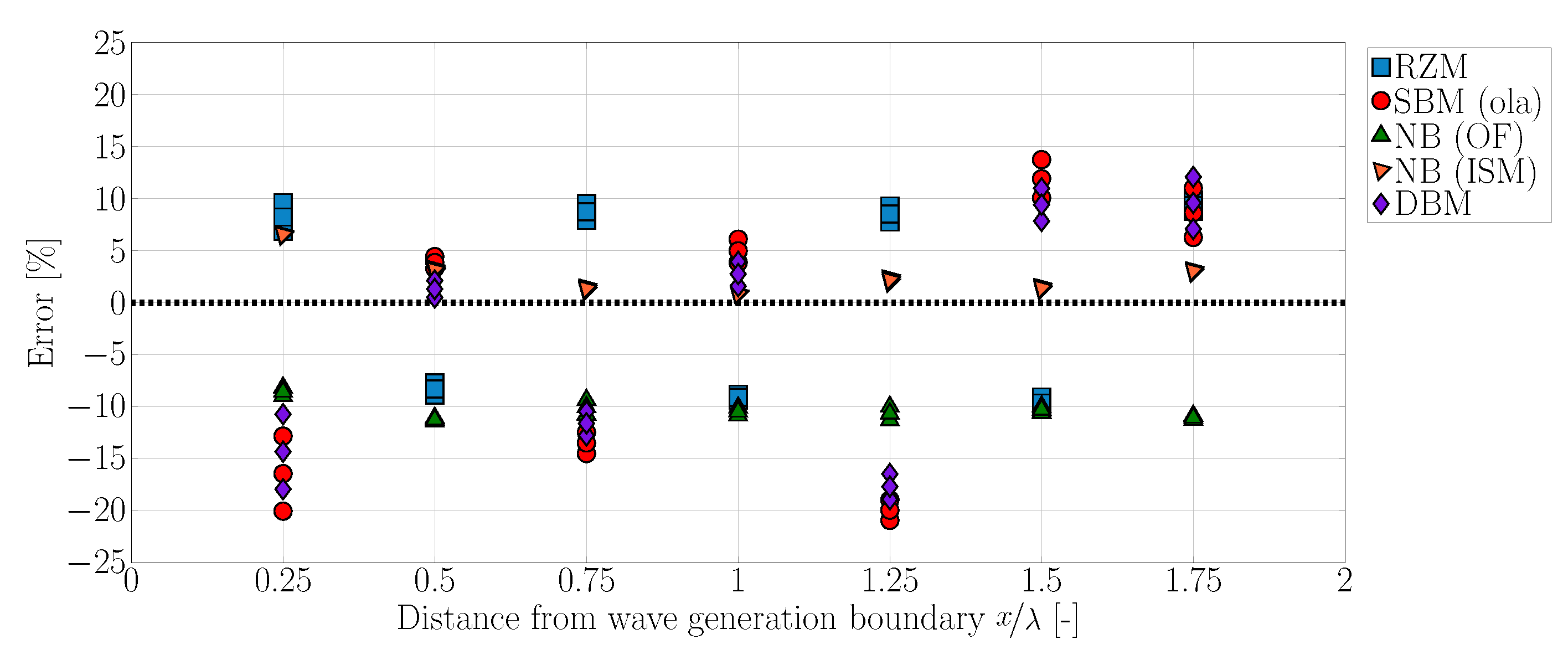
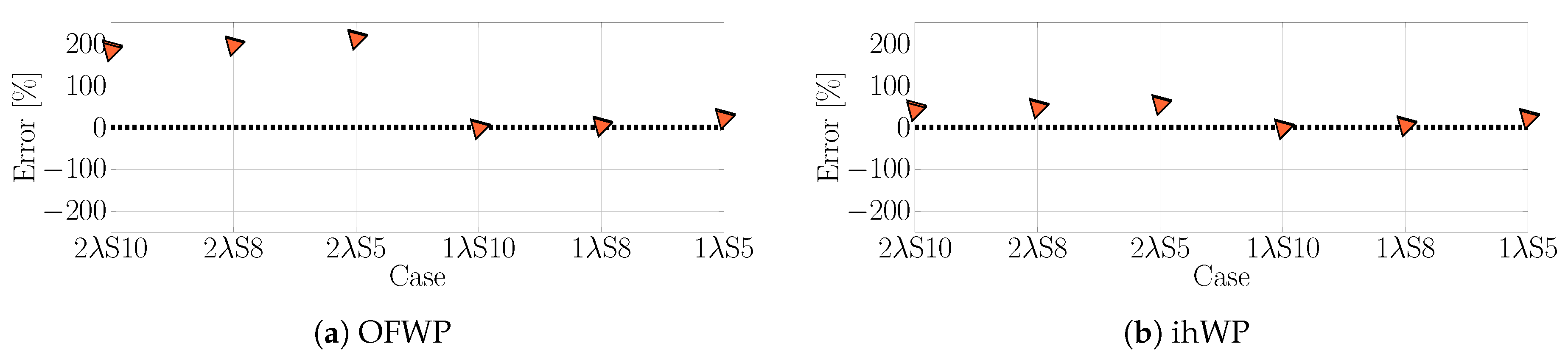
Figure 15.
Error between target and resulting wave height ± standard deviation for the five different NWMs at different locations along the CNWT.
Figure 15.
Error between target and resulting wave height ± standard deviation for the five different NWMs at different locations along the CNWT.
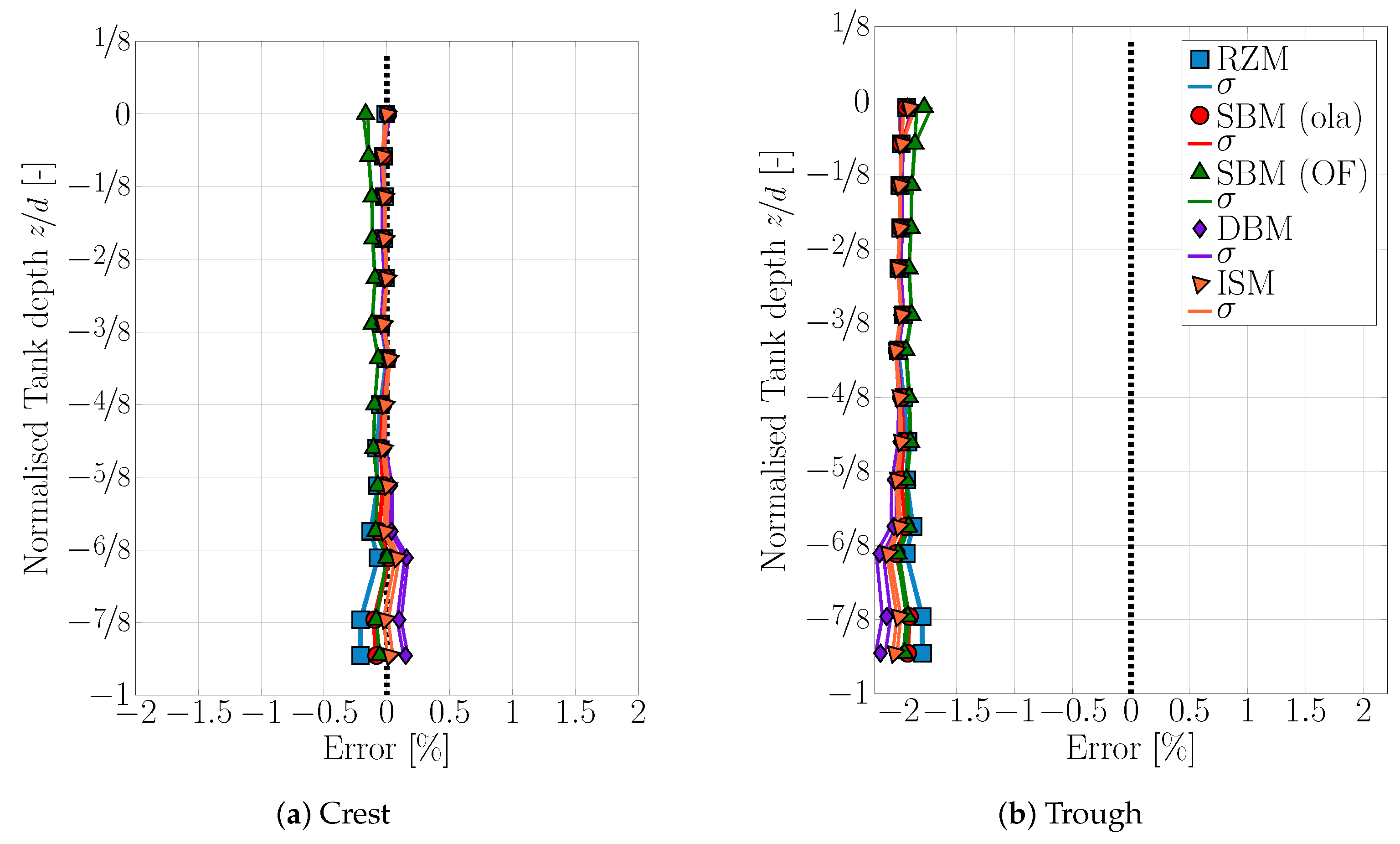
Figure 16.
Velocity profiles of the horizontal velocity component along the water depth for wave crests (a) and trough (b).
Figure 16.
Velocity profiles of the horizontal velocity component along the water depth for wave crests (a) and trough (b).
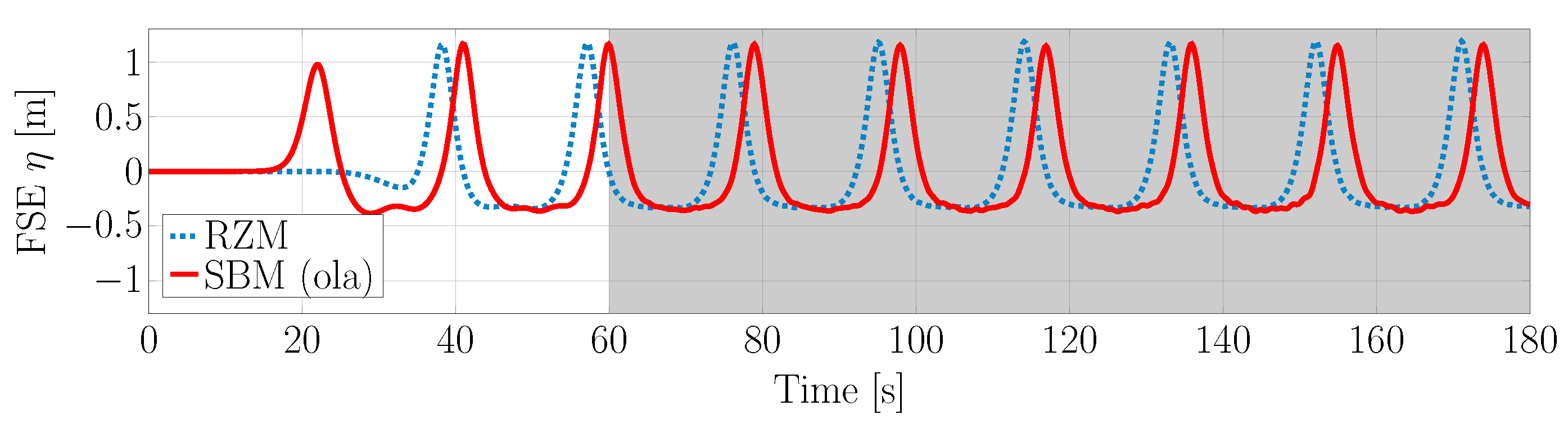
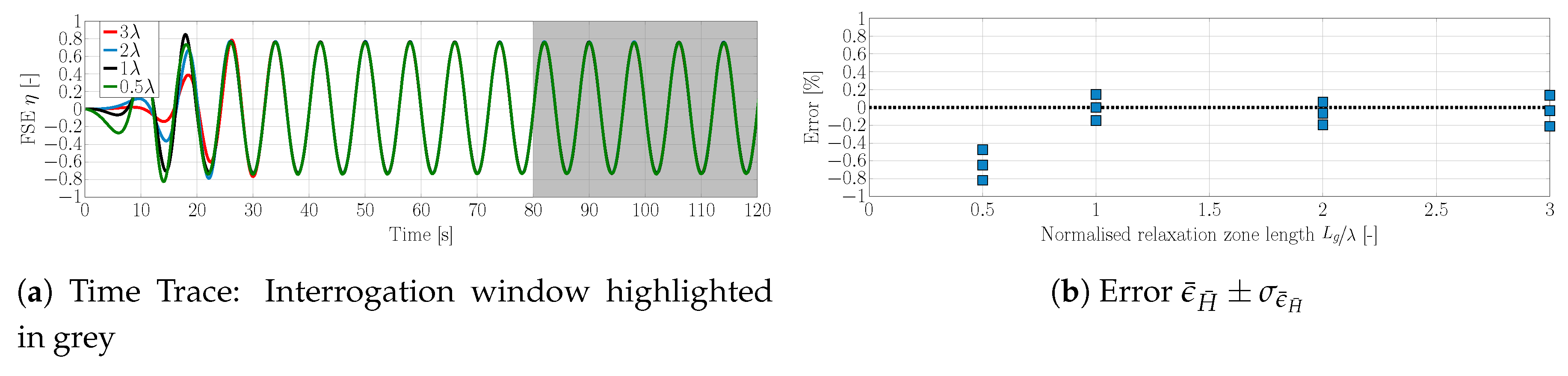
Figure 17.
Plot of the free surface elevation (FSE) time traces at the centre of the CNWT for the RZM and SBM (ola). The interrogation window used for the zero up-crossing is shaded. For brevity, results are only shown for the OFWP.
Figure 17.
Plot of the free surface elevation (FSE) time traces at the centre of the CNWT for the RZM and SBM (ola). The interrogation window used for the zero up-crossing is shaded. For brevity, results are only shown for the OFWP.
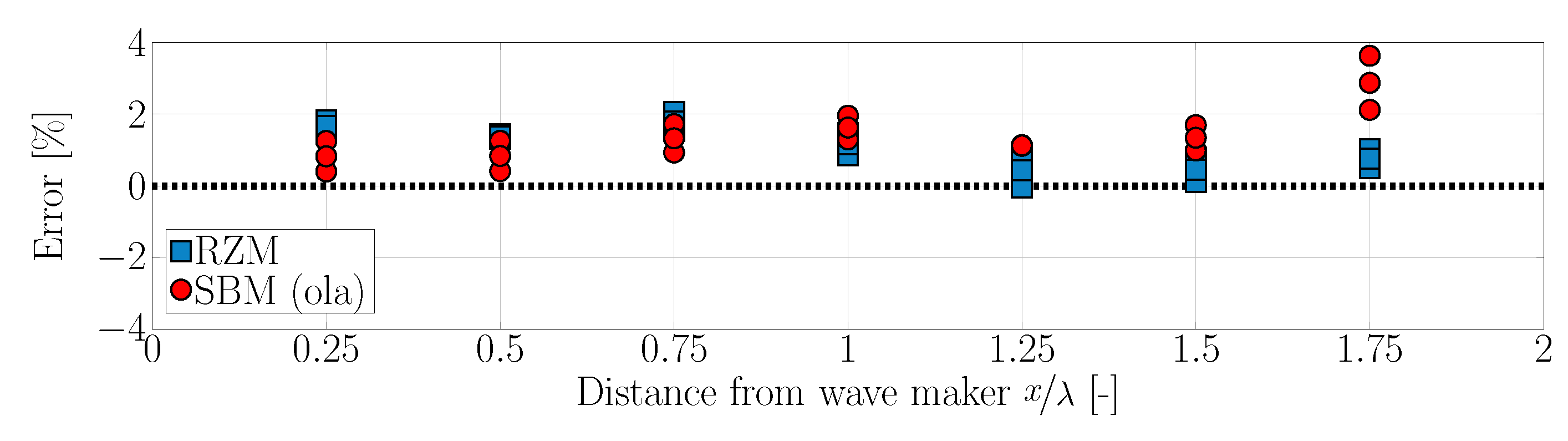
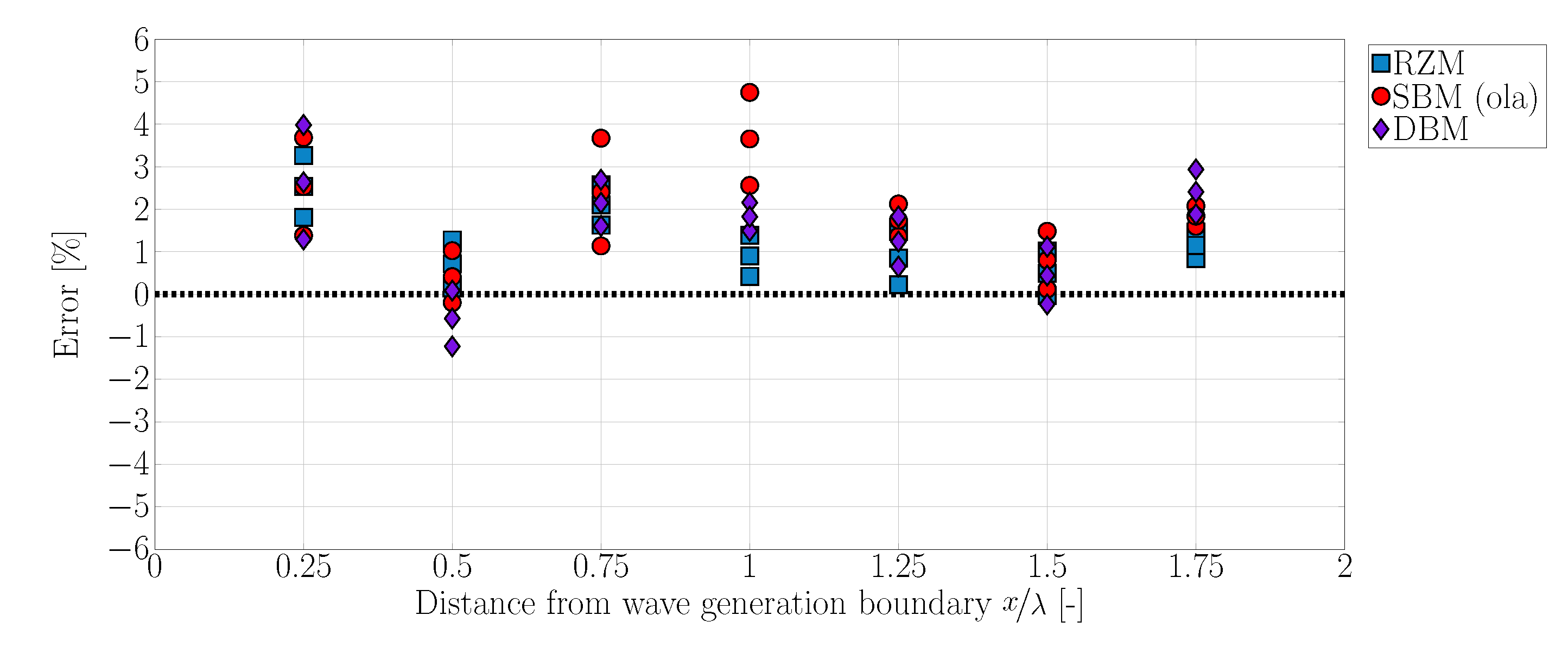
Figure 18.
The error between target and resulting wave height ± standard deviation along the CNWT for the RZM and SBM (ola). For brevity, results are only shown for the OFWP.
Figure 18.
The error between target and resulting wave height ± standard deviation along the CNWT for the RZM and SBM (ola). For brevity, results are only shown for the OFWP.
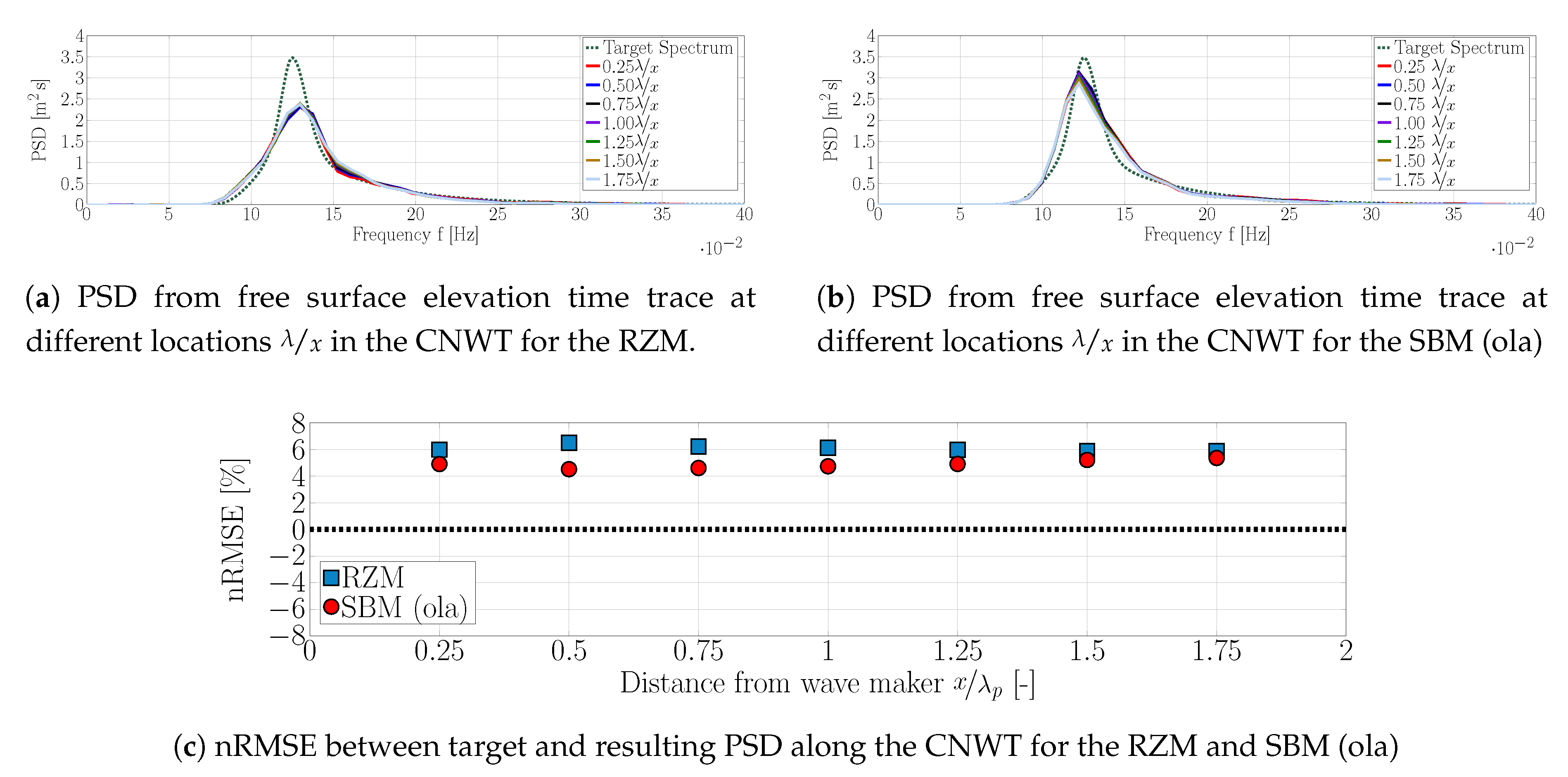
Figure 19.
Results for the wave generation test case for the polychromatic sea state generated with the relaxation zone method and static boundary method, implemented in the olaFLOW toolbox.
Figure 19.
Results for the wave generation test case for the polychromatic sea state generated with the relaxation zone method and static boundary method, implemented in the olaFLOW toolbox.
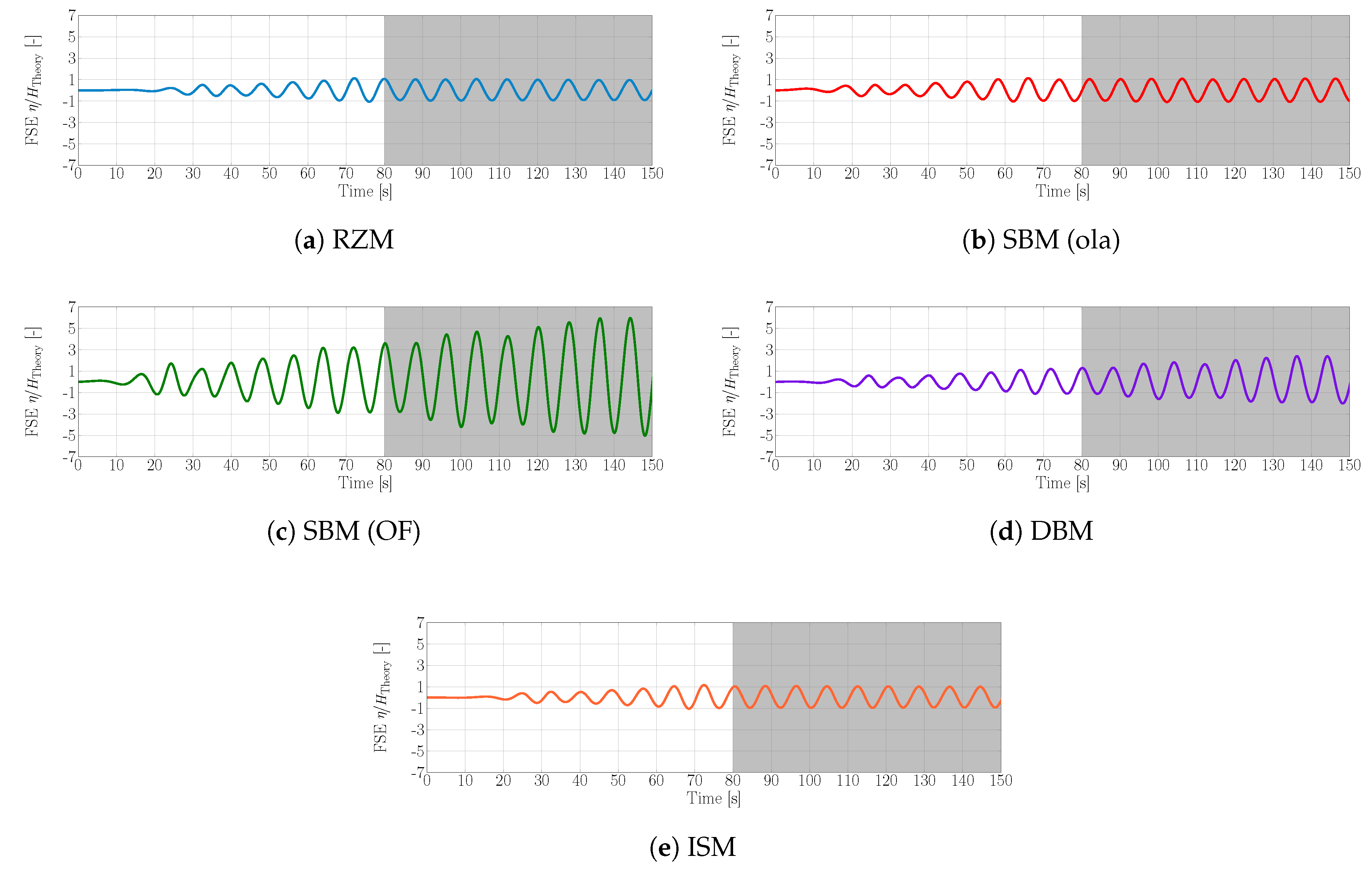
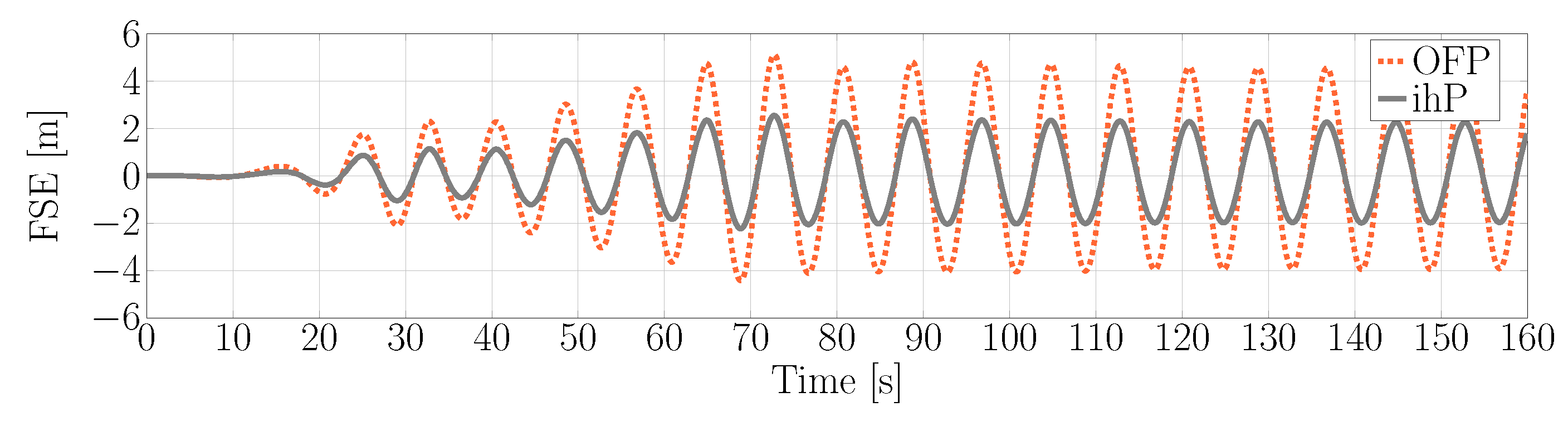
Figure 20.
Free surface elevation (FSE) time traces extracted at the centre location of the CNWT using the OFWP for the RZM, SBM (ola), SBM (OF), DBM and ISM. The interrogation window for the evaluation of Metric #6 are highlighted in grey.
Figure 20.
Free surface elevation (FSE) time traces extracted at the centre location of the CNWT using the OFWP for the RZM, SBM (ola), SBM (OF), DBM and ISM. The interrogation window for the evaluation of Metric #6 are highlighted in grey.
Figure 21.
for the deep water mSS at different locations along the CNWT.
Figure 21.
for the deep water mSS at different locations along the CNWT.
Figure 22.
for the shallow water mSS at different locations along the CNWT.
Figure 22.
for the shallow water mSS at different locations along the CNWT.
Table 1.
Overview of evaluation metrics.
Table 1.
Overview of evaluation metrics.
| Metric # | Application | Quantity | Unit | Equation # |
|---|
| 1 | Discretisation uncertainty | U | [%] | (10) |
| 2 | Sensitivity to solution schemes, solver | | [%] | (13) |
| | setting and numerical wave damping | | | |
| 3 | Wave generation of mSSs (wave height) | | [%] | (15) |
| 4 | Wave generation of mSSs (velocity profiles) | | [%] | (18) |
| | | | | (19) |
| 5 | Wave generation of pSSs | | [%] | (20) |
| 6 | Wave absorption at generation boundary | | [%] | (22) |
| 7 | Wave absorption at the far field boundary | R | [%] | (23) |
Table 2.
Test matrix.
| | Wave Propagation Test | mSSs | pSS |
|---|
| | Deep Water | Deep Water | Shallow Water | |
|---|
| Discretisation uncertainty | • | – | – | – |
| Schemes and solver settings | • | – | – | – |
| Numerical wave damping | • | – | – | – |
| Wave generation | – | • | • | • |
| Wave absorption at generator | – | • | • | – |
| Wave absorption at far field boundary | – | • | • | • |
Table 3.
Sea states characteristics.
Table 3.
Sea states characteristics.
| | T () | H () | d | () | | | Wave Theory |
|---|
| mSS | | | | | | | |
| Deep Water | | | | | | | 2nd Order Stokes |
| Shallow Water | | | | | | | Cnoidal Wave Theory |
| pSS | | | | | | | |
| Deep Water | | | | | | | JONSWAP |
Table 4.
Domain layouts.
| | Description | Figure |
|---|
| Discretisation uncertainty | a short domain with cyclic boundaries in wave propagation direction | Figure 7a |
| Schemes and solver settings | a short domain with cyclic boundaries in wave propagation direction | Figure 7a |
| Numerical wave damping | a short domain with cyclic boundaries in wave propagation direction | Figure 7a |
| Wave generation | a pseudo-infinitely long domain with a fully reflective wall at the FFB | Figure 7b |
| Wave absorption at generator | a short domain with a fully reflective wall at the FFB | Figure 7c |
| Wave absorption at FFB | a short domain with wave absorption at the FFB | Figure 7d |
Table 5.
Spatial convergence.
Table 5.
Spatial convergence.
| | 5CPH | 10CPH | 20CPH | Convergence | U |
|---|
| ihWP | 1.483 m | 1.493 m | 1.494 m | Monotone | <0.01% |
| OFWP | 1.486 m | 1.494 m | 1.496 m | Monotone | |
| isoWP | 1.491 m | 1.493 m | 1.497 m | – | – |
Table 6.
Temporal convergence.
Table 6.
Temporal convergence.
| | | | | Convergence | U |
|---|
| ihWP | 1.482 m | 1.494 m | 1.496 m | Monotone | |
| OFWP | 1.484 m | 1.496 m | 1.498 m | Monotone | |
| isoWP | 1.488 m | 1.497 m | 1.498 m | Monotone | |
Table 7.
Relative deviation of phase average wave height for different mesh layouts.
Table 7.
Relative deviation of phase average wave height for different mesh layouts.
| | | Uniform | Mesh #1 | Mesh #2 | Mesh #3 | Mesh #4 | Mesh #5 |
|---|
| [-] | 1 | 0.66 | 0.46 | 0.77 | 0.11 | 0.04 |
| ihWP | [%] | 0 | <–0.1 | 0.1 | 0.2 | 0.2 | –0.1 |
| OFWP | [%] | 0 | <–0.1 | 0.1 | 0.1 | <0.1 | <0.1 |
| isoWP | [%] | 0 | <–0.1 | <0.1 | 0.1 | 0.1 | 0 |
Table 8.
Test matrix for the sensitivity analysis to numerical solution schemes.
Table 8.
Test matrix for the sensitivity analysis to numerical solution schemes.
| Case # | Time Derivative Schemes | Divergence Schemes | |
|---|
| | | | | |
| 1 | Euler | Gauss MUSCL | Gauss interfaceCompression | 255 |
| 2 | CrankNicolson 0.9 | Gauss MUSCL | Gauss interfaceCompression | 252 |
| 3 | CrankNicolson 0.5 | Gauss MUSCL | Gauss interfaceCompression | 242 |
| 4 | CrankNicolson 0.1 | Gauss MUSCL | Gauss interfaceCompression | 241 |
| 5 | Euler | Gauss vanLeer | Gauss interfaceCompression | 242 |
| 6 | Euler | Gauss MUSCL | Gauss linear | 257 |
| 7 | Euler | Gauss vanLeer | Gauss linear | 258 |
Table 9.
Test matrix for the sensitivity analysis to numerical solver settings.
Table 9.
Test matrix for the sensitivity analysis to numerical solver settings.
| Case # | PIMPLE | Water Volume Fraction | |
|---|
| | # of PIMPLE Iterations | cAlpha | Semi-Implicit MULES | # of MULES Iterations Over the Limiter | |
|---|
| 1 | 3 | 1 | yes | 3 | 255 |
| 2 | 3 | 0 | yes | 3 | 255 |
| 3 | 3 | 0.5 | yes | 3 | 260 |
| 4 | 1 | 1 | yes | 3 | 228 |
| 5 | 3 | 1 | yes | 1 | 248 |
| 6 | 3 | 1 | no | – | 240 |
Table 10.
Error between target and resulting wave height for different time step sizes NWMs and WPs.
Table 10.
Error between target and resulting wave height for different time step sizes NWMs and WPs.
| T/dt = 200 | T/dt = 400 | T/dt = 800 | T/dt = 1600 |
|---|
| | ihWP | OFWP | isoWP | ihWP | OFWP | isoWP | ihWP | OFWP | isoWP | ihWP | OFWP | isoWP |
|---|
| RZM | | | | | | | | | | | | – |
| SBM (ola) | | | | | | | | | | | | |
| SBM (OF) | | | | | | | | | | | | |
| DBM | – | – | – | | | | | | | | | |
| ISM | | | – | | | – | | | – | | | – |
Table 11.
Error between target and resulting wave height ± standard deviation for the five different NWMs at different locations along the NWT.
Table 11.
Error between target and resulting wave height ± standard deviation for the five different NWMs at different locations along the NWT.
| | | | | | | |
|---|
| RZM | | | | | | | |
| SBM (ola) | | | | | | | |
| SBM (OF) | | | | | | | |
| DBM | | | | | | | |
| ISM | | | | | | | |
Table 12.
Error between target and resulting wave height for the five different NWMs at different locations along the NWT.
Table 12.
Error between target and resulting wave height for the five different NWMs at different locations along the NWT.
| T/dt = 400 | T/dt = 800 | T/dt = 1600 | T/dt = 3200 |
|---|
| | ihWP | OFWP | isoWP | ihWP | OFWP | isoWP | ihWP | OFWP | isoWP | ihWP | OFWP | isoWP |
|---|
| RZM | | | – | | | – | | | – | | | – |
| SBM (ola) | | | | | | | | | | | | |
Table 13.
Error between target and resulting wave height for the five different NWMs at different locations along the NWT.
Table 13.
Error between target and resulting wave height for the five different NWMs at different locations along the NWT.
| | | | | | | |
|---|
| RZM | | | | | | | |
| SBM (ola) | | | | | | | |
Table 14.
Error for the evaluation of the absorption quality at the wave generation boundary.
Table 14.
Error for the evaluation of the absorption quality at the wave generation boundary.
| Shallow Water mSS | Deep Water mSS |
|---|
| RZM | | |
| SBM (ola) | – | |
| SBM (OF) | – | |
| DBM | – | |
| ISM | – | |
Table 15.
Reflection coefficient, normalised run time and normalised run time per cell for the deep water mSS.
Table 15.
Reflection coefficient, normalised run time and normalised run time per cell for the deep water mSS.
| | R | | |
|---|
| RZM | 5.1 | 291 | 8.7 |
| SBM (ola) | 26.2 | 77 | 6.9 |
| NB (OF) | 1.6 | 152 | 6.8 |
| NB (ISM) | 2.0 | 202 | 7.3 |
| DBM | 25.6 | 188 | 16.9 |
Table 16.
Reflection coefficient, normalised run time and normalised run time per cell for the shallow water mSS.
Table 16.
Reflection coefficient, normalised run time and normalised run time per cell for the shallow water mSS.
| | R | | |
|---|
| RZM | 3.8 | 148 | 6.8 |
| SBM (ola) | 3.7 | 63 | 8.8 |
| NB (OF) | – | – | – |
| NB (ISM) | – | – | – |
| DBM | 3.2 | 123 | 17.2 |
Table 17.
Reflection coefficients, normalised run time and normalised run time per cell for the pSS absorption test case.
Table 17.
Reflection coefficients, normalised run time and normalised run time per cell for the pSS absorption test case.
| | R | | |
|---|
| RZM | 7.2 | 2238 | 67.1 |
| SBM (ola) | 25.3 | 105 | 9.4 |
| NB (OF) | – | – | – |
| NB (ISM) | – | – | – |
| DBM | 23.6 | 235 | 21.1 |
Table 18.
Binary assessment of important NWM features.
Table 18.
Binary assessment of important NWM features.
| | Implemented Wave Theories | Wave-Current | Calibration Required | User Input | Coupling to External Wave Propagation Models |
|---|
| | Stokes 1st | Stokes 2st | Stokes 3rd | Stokes 5th | Cnoidal | Stream-Function | Solitary | Polychromatic | Interaction | Generation | Absorption | mSS | pSS |
|---|
| RZM | • | • | – | • | • | • | • | JONSWAP, | • | • | • | Ramp time, depth, | Spectrum, number of | • |
| | | | | | | | | Pierzon- | | | | theory, H, T, k, | frequencies, ramp time, | |
| | | | | | | | | Moscowitch | | | | , direction | , , , depth, direction | |
| SBM | • | • | • | • | • | • | – | • | • | – | – | H, T, direction, | Components of: wave periods, | – |
| (ola) | | | | | | | | | | | | phase, theory | wave height, wave phase | |
| | | | | | | | | | | | | | wave directions | |
| SBM | • | • | – | • | – | – | • | – | • | – | | . , phase | – | – |
| (OF) | | | | | | | | | | | | ramp length | | |
| ISM | • | • | • | • | – | – | • | Focused waves | – | • | • | FSE time trace | FSE time trace | – |
| DBM | • | • | • | – | – | – | – | – | – | – | – | H, T, depth, direction, | Paddle motion time trace | – |
| | | | | | | | | | | | | Paddle motion time trace | | |






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



























