3.1. Dynamic Motion Responses of a Towing System
The first case examined here is the motion responses of a towing system, in which a vessel is tugged though a towline, showing large sway-yaw coupled motions due to unstable towing characteristics. The time histories of the towed vessel motion and towline tension are presented in
Figure 2. For the validation of the present numerical method, the simulation results are directly compared with the model test data of Yasukawa et al. [
6]. In this case, it is assumed that the towing operation is performed at a constant towing speed (
, following a straight path. Here, the towing speed corresponds to 0.145 as the Froude number which is defined as
No tug control effects are taken into account. Thus, the tug can be assumed as an imaginary towing point, which is constantly moving. It is to be noted that the experimental data are only available up to approximately 60 s in model scale, due to the limitation of basin size. Therefore, only 4–5 periods of slewing motion can be observed. As shown in the figures, large oscillatory yawing motion is clearly observed in terms of yaw angle and yaw rate. In this case, the slewing motion period is approximately 22 s in model scale, and the maximum yawing angle is approximately 40°. In the case of towline tension, high tension peaks occur every 11 s, half of the slewing motion period, because the towline is periodically stretched when the towed vessel changes its heading at both lateral end positions of the slewing trajectory. Due to these fishtailing motions of the towed vessel, the yaw rate and tension time histories clearly show highly nonlinear characteristics with higher harmonic components.
To reveal the dynamic characteristics of this towing system, four phase trajectories, which are based on the velocity and motion variables of the towed vessel, are shown in
Figure 3. In each figure, the blue dashed line denotes the phase trajectory from 20 to 70 s, which corresponds to the initial transient motion response of the towed vessel. The black solid line represents the phase trajectory from 70 to 500 s, where the steady periodic motions follow the closed oscillation. Therefore, this periodic phase trajectory is ‘a single stable limit cycle’ of the dynamic system under discussion here. It can be stated that after a short transient response depending on the initial conditions, the dynamic states of the towed vessel are quickly attracted to the limit cycle. When considering the (u, v) and (u, r) projections of the system’s state space, the phase trajectories appear to have the shape of a butterfly. This is because the lateral velocity (v) and yaw rate (r) have almost twice the oscillation period of surge velocity (u). As shown in
Figure 1, these surge oscillations are also directly related to the towline tension responses. It can be seen that the phase trajectories of sway-yaw velocities (v, r) and motions
constitute closed circular curves, which look like skewed ellipses. This indicates that the sway and yaw motion have the same periods of slewing motion.
Figure 4 shows the three-dimensional phase trajectories of the towed vessel with the velocity variables (u-v-r). In this figure, the whole dynamic structure is more clearly shown. In the three-dimensional phase space, it can be seen that no intersections are found in the limit cycle, which means that only one path is determined at a certain state on the limit cycle.
3.2. Simulation Parameters and Limit Cycle
The dynamic characteristics of the towed vessel can be affected by various simulation parameters. Some critical parameters can change the resulting limit cycle of the towed vessel, while others mainly affect the transient response, without changing the limit cycle. For example, the transient response would be affected by the initial conditions of the towed vessel. However, the stable limit cycle of the dynamic system should be the same, regardless of the initial conditions. To check the characteristics of the limit cycle for the towing system under discussion here, various phase trajectories with different initial conditions are suggested in
Figure 5. Even though the initial conditions are quite different in terms of the lateral position (
) and yaw angle (
) of the towed vessel, it can be clearly observed that the dynamic states of the towed vessel are quickly attracted to the same limit cycle within a short time period. These results demonstrate that the dynamic system of the towed vessel has a stable limit cycle.
Towing speed is another important control parameter of the towing operation, which affects the limiting cycle.
Figure 6 compares three phase trajectories under different towing speed conditions. In this figure, only the limit cycles from periodic motion trajectories are plotted together. As the towing speed increases, the resistance of the towed vessel also increases, thereby increasing the towline tension. It is known that the stable towing requires sufficient towline tension [
1,
2,
3]. This means that a low towing speed makes the towing dynamics more unstable. Conversely, an increase of towing speed can improve the towing characteristics. As shown in the figures, the shapes and sizes of the phase trajectories are very similar, regardless of the towing speed. Since the velocity variables are normalized by the towing speed, similar trajectory sizes mean that the velocity responses of the towed vessel are linearly increased with the towing speed. Under the non-dimensional phase space, it can be confirmed that the limit cycles are not greatly changed according to the towing speed. Therefore, the general nonlinear dynamic characteristics of the towed vessel can be discussed, with normalized phase planes.
Figure 7 shows the effects of hull hydrodynamic force coefficients on towing phase trajectories. In the first row, the simulation results with variations of linear yawing moment coefficient (
) are presented. It is known that towing stability is ensured when the restoring moment due to lateral force is bigger than yawing moment [
1,
2,
3]. Therefore, as the yawing moment decreases, better towing stability may be expected. As shown in the figures, the phase trajectories become smaller with the decrease of the yawing moment. In the second row of
Figure 7, the simulation results with resistance (
) variation are presented. The resistances are increased by 20% and 40%. As the resistance increases, the towline tension becomes stronger, improving towing stability. Thus, it can be observed that the increase of resistance makes the phase trajectories smaller.
Figure 8 shows the effect of numerical models on the dynamics of the towed vessel. Here, two numerical models are taken into account. The original nonlinear MMG model includes higher-order damping force terms while the linearized MMG model only includes linear damping terms for hull force modeling. As shown in the figures, as the linear model is used, the phase trajectories become slightly larger than those of the nonlinear model. This confirms that the linear model generates lower damping forces, so that the motion responses of the towed vessel become larger.
3.3. Effect of Towline and Tug Motion
For the autonomous towing system discussed here, the towing forces can be delivered via towline to the towed vessel. Therefore, characteristics such as towline length (
), stiffness (
), and configurations are also important parameters which directly affect the towed vessel dynamics. In particular, the towline length is related to the restoring forces in the sway direction, which has an analogy with a typical pendulum system. If the towline length increases, the restoring force in sway direction is reduced, thereby increasing the slewing motion period.
Figure 9 shows the phase trajectories of towed vessels with three different towline lengths. It can be seen that as the towline length increases, the overall velocity phase trajectories become smaller with similar shapes. However, as shown in the phase trajectories of
, the lateral distance of the sway motion significantly increases with the increase of towline length. For example, when the towline length is the same as the vessel length, the maximum lateral position is about 4.5 times that the vessel breadth. However, when a longer towline, such as one measuring three times the vessel length, is applied, the maximum lateral position increases up to about 6.5 times the vessel breadth. Interestingly, the heading angle is limited to approximately 45° in this case, and the yaw rate tends to decrease due to the large slewing motion in lateral direction, as shown in the (v, r) phase trajectory.
In real towing operation, towline has a nonlinear stiffness with horizontal catenary configuration. For simplicity, in this study, to check the nonlinear effect of the towline, bilinear towline models were used.
Figure 10 compares the dynamic responses of the towed vessel when different bilinear towline models shown in Equation (8) are applied. Here, two spring constants,
and
denote the spring constants, when the towline (
) is stretched and slacked, compared to the initial unstretched length (
), respectively.
It is expected that the towline spring will decrease significantly as the towline is slacked. As shown in present numerical simulations, until the stiffness ratio of the towline is bigger than 10%, the limiting cycle is retained, showing almost a single trajectory. However, as the stiffness ratio of the towline becomes about 5%, the trajectories become thicker, meaning that the limiting cycle has a long period. When the stiffness ratio is 0.01, very complex trajectories can be found. This means that the dynamic characteristics of the towed vessel come closer to being chaotic, due to the nonlinear stiffness effect of the towline.
Up to now, we have neglected the effect of tug motion on the towed vessel dynamics. However, in real situations, the towed vessel and tug motions are fully coupled in the total towing system. In other words, the tug motion can also affect the dynamics of the towing system. In this section, in order to check the tug motion effect on the dynamic characteristics of the towing system, additional simulations, including prescribed tug motion, are discussed.
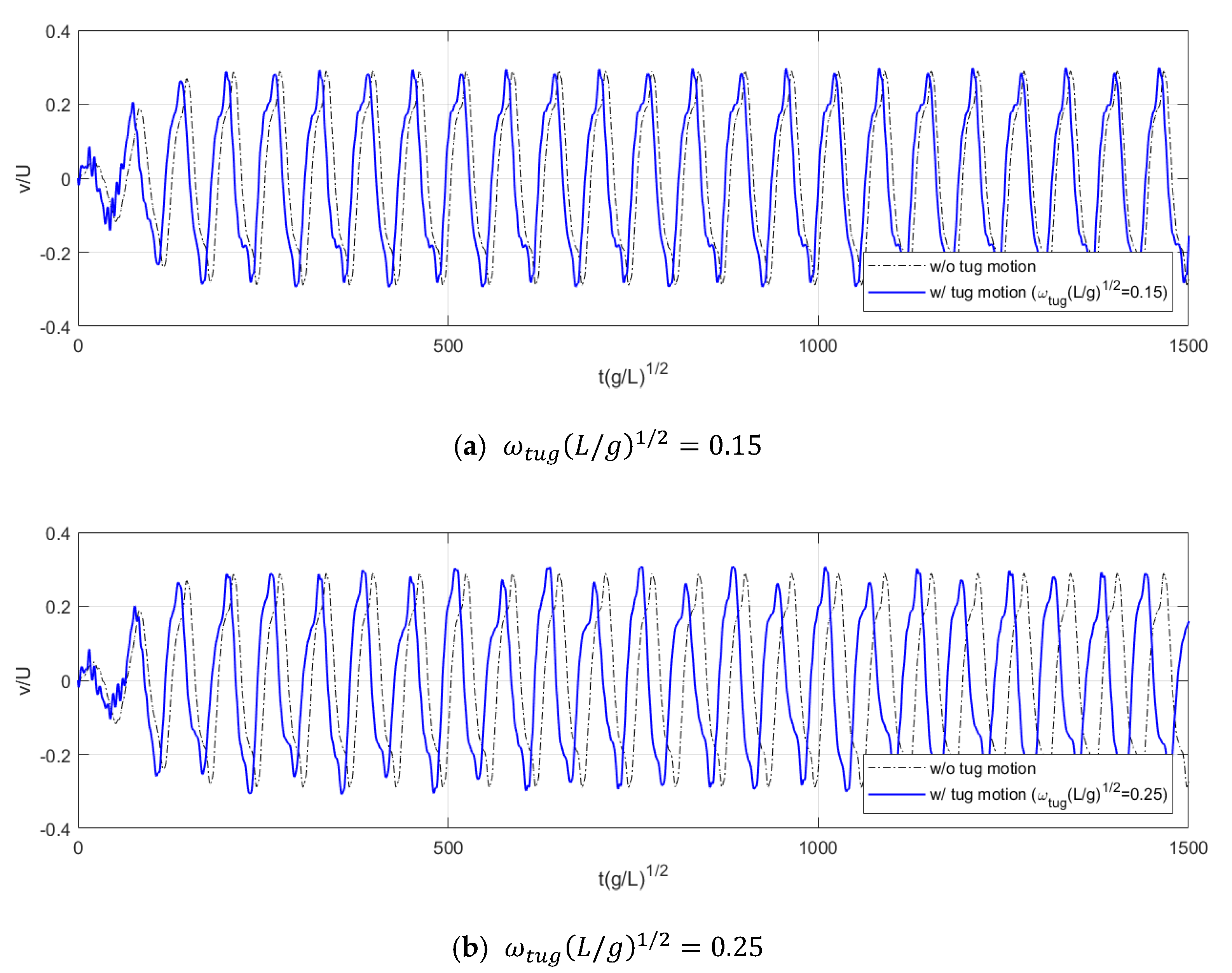
Figure 11 shows the time series of the towed vessel motion considering tug longitudinal disturbances. In this case, the tug motion disturbances are assumed to be harmonic motion responses, by applying Equation (9), and the tug motion amplitude (
) is assumed as 5% of the towed vessel length.
As shown in the figure, the towed vessel exhibits more irregular slewing motion response, due to the tug motion disturbance. In particular, at high frequency condition (
), it can be observed that not only slewing motion amplitudes, but also oscillation periods, become more irregular.
Figure 12 compares the phase trajectories under the various tug motion frequency conditions. Owing to the tug motion effect, two distinct features are found when comparing with the phase trajectories of no tug motion. First, asymmetric patterns are found, especially when the nondimensionalized oscillation periods (
) are 0.10, 0.15 and 0.30. The other feature is the limit cycle of multiple lines, which means that the limiting cycle has much longer periods, especially when the nondimensionalized oscillation periods (
) are 0.15 and 0.25.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














