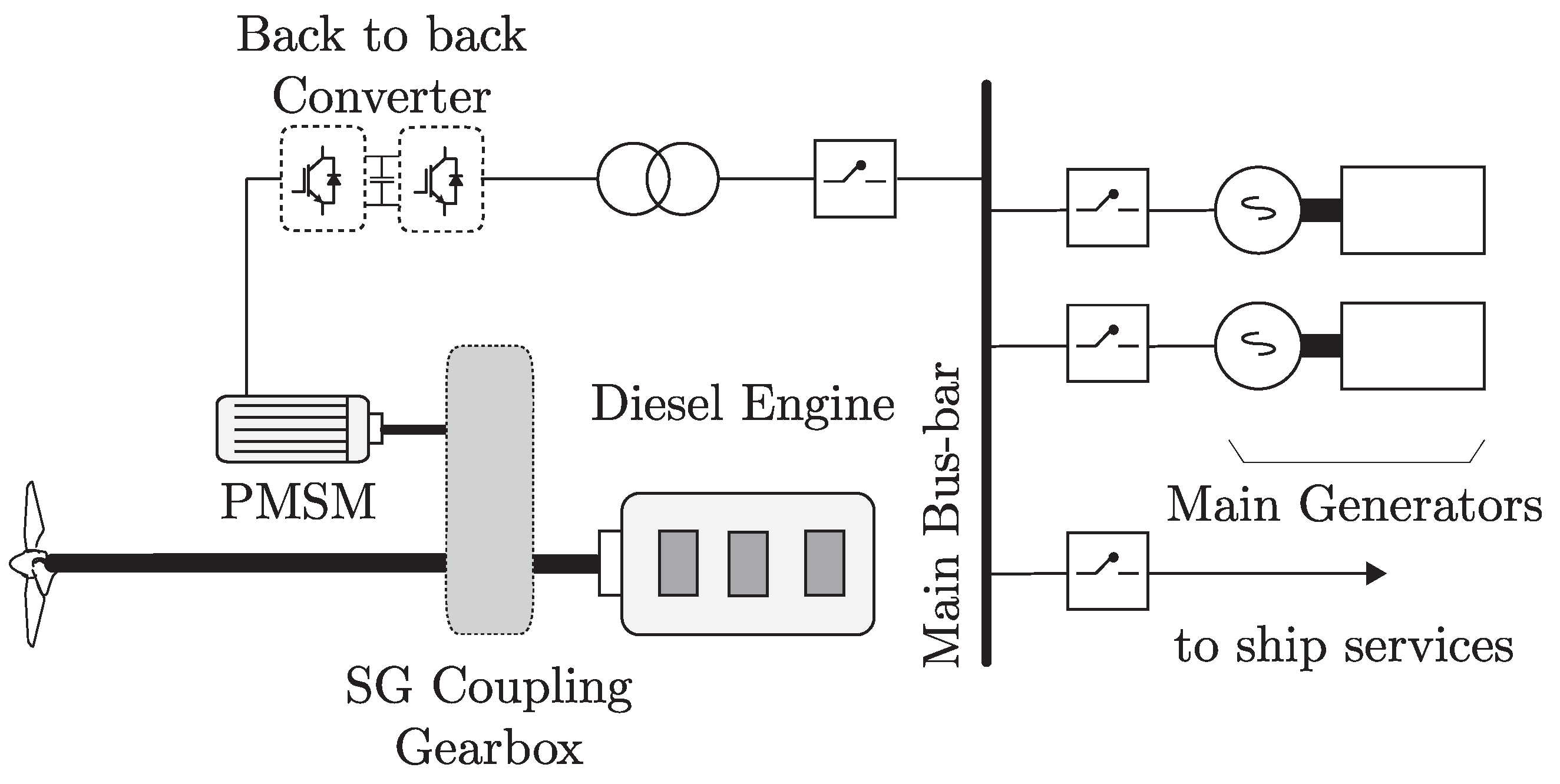
The synchronous machine is connected to the main ship‘s grid using a back-to-back power converter. This configuration enables bidirectional power flow, between the electric drive and the ship‘s grid, thus enabling the electric drive to operate in power take-off (PTO) or power take-in (PTI) modes, depending on the direction of the power flow, as shown in
Figure 3. Moreover, the use of the back-to-back converter configuration decouples the electric drive and grid control schemes. This enables the grid side control scheme to be synchronized referred to the ship‘s main busbar frequency, independently of the electric drive operational frequency, and therefore the diesel engine operational speed [
16].
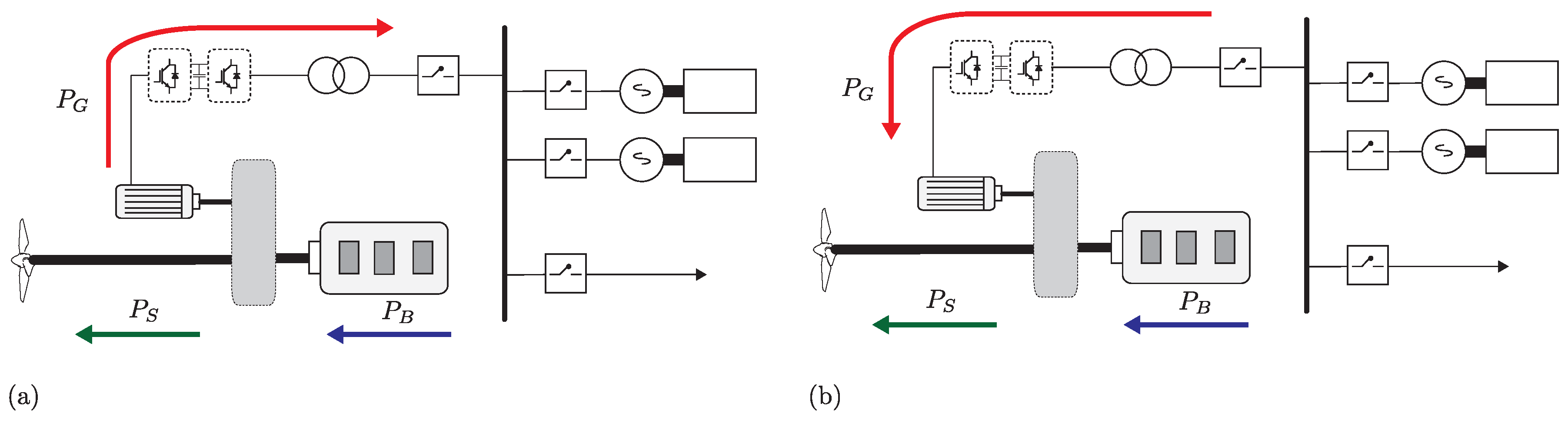
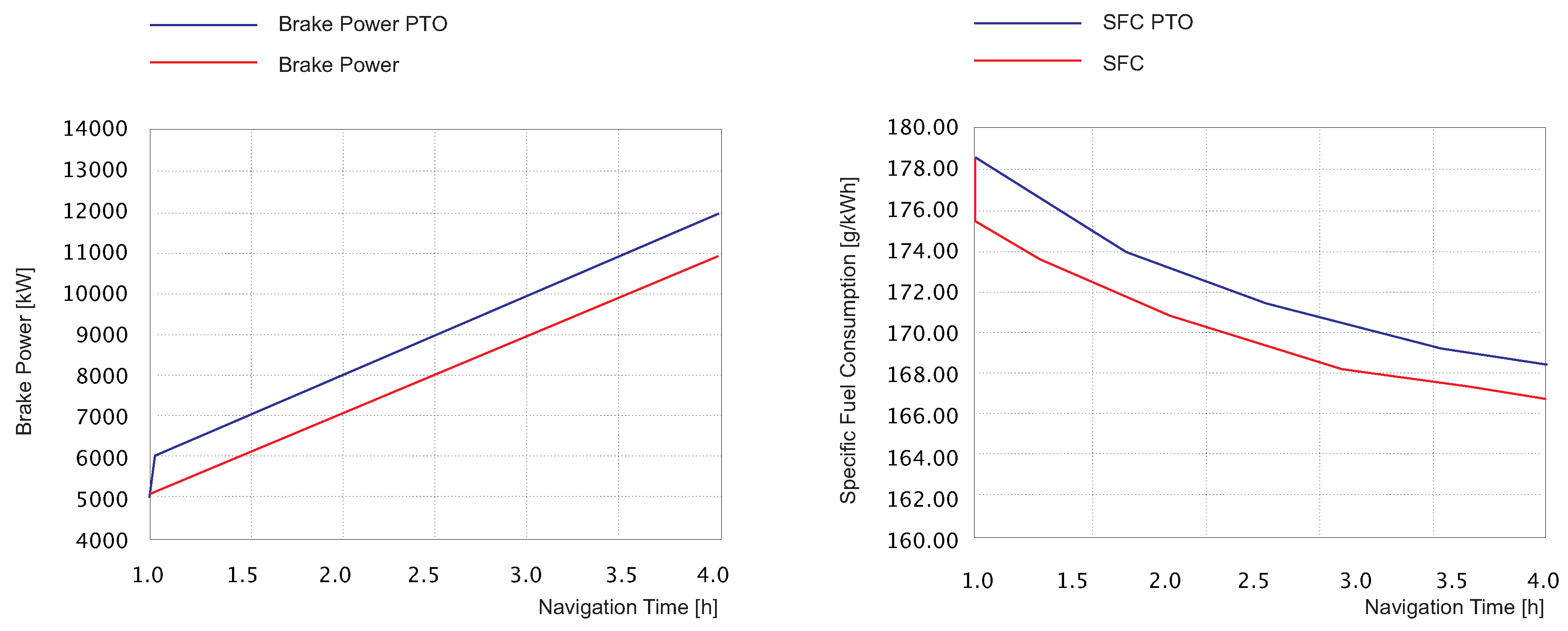
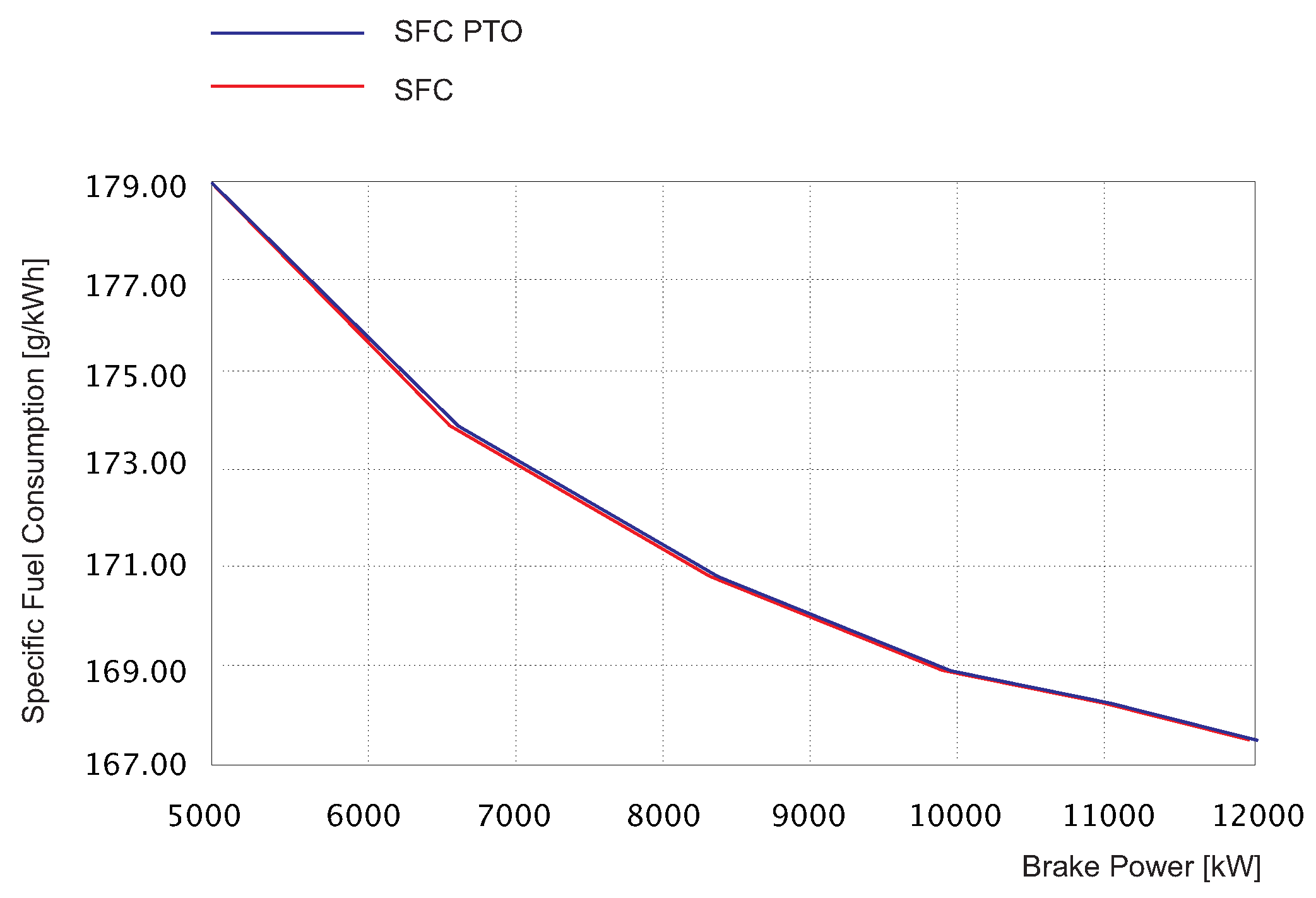
Power take-off mode: in this mode, the main diesel engine supplies the power needed for the propulsion
as well as for the ship’s consumers
by forcing the electric drive to operate within the generator region. Depending on the ship’s load and the required propulsion power, all or some of the generator sets (GS) are turned off, as shown in
Figure 3a. The engine developed power
.
Power take in mode: in this mode the electric drive is forced to operate within the motor region, an auxiliary motor, allowing to reduce the main engine’s load, as shown in
Figure 3b. Depending on the required shaft power, the system operates in booster mode, when both electric and diesel provide deliver power to shaft, or diesel-electric mode, when only the electric drive delivers power. Therefore, the engine developed power
.
3.1. Diesel Engine Model
The diesel engine dynamics is obtained energy conversion principle, by defining the system‘s Hamiltonian
as given in Equations (
7)–(
9)
where
is the chemical energy also known as indicated energy,
correspond to the system loses, and
is the stored energy in the inertia. The indicated energy can be defined as a nonlinear function of the fuel enthalpy
h, the fuel flow rate
g, and shaft rotational speed
and the energy stored in the inertia is given as in Equation (
9)
where
L stands for the rotational momentum. The total converted energy into mechanical torque is given by Equations (
10) and (
11).
where
corresponds to engine’s indicated torque,
the pumping torque, and
the friction torque.
The indicated torque is dependent on the amount of fuel injected into each of cylinders per cycle as given in Equation (
12)
where
corresponds to the fuel delivery per cycle per cylinder,
to number of cylinders,
is the heating value of fuel,
is the indicated efficiency, and
the number of crank revolutions. The indicated efficiency is given as in Equation (
13)
where
is the compression ratio,
the gas specific heat capacity ratio in the cylinder, and
represents the combustion chamber efficiency.
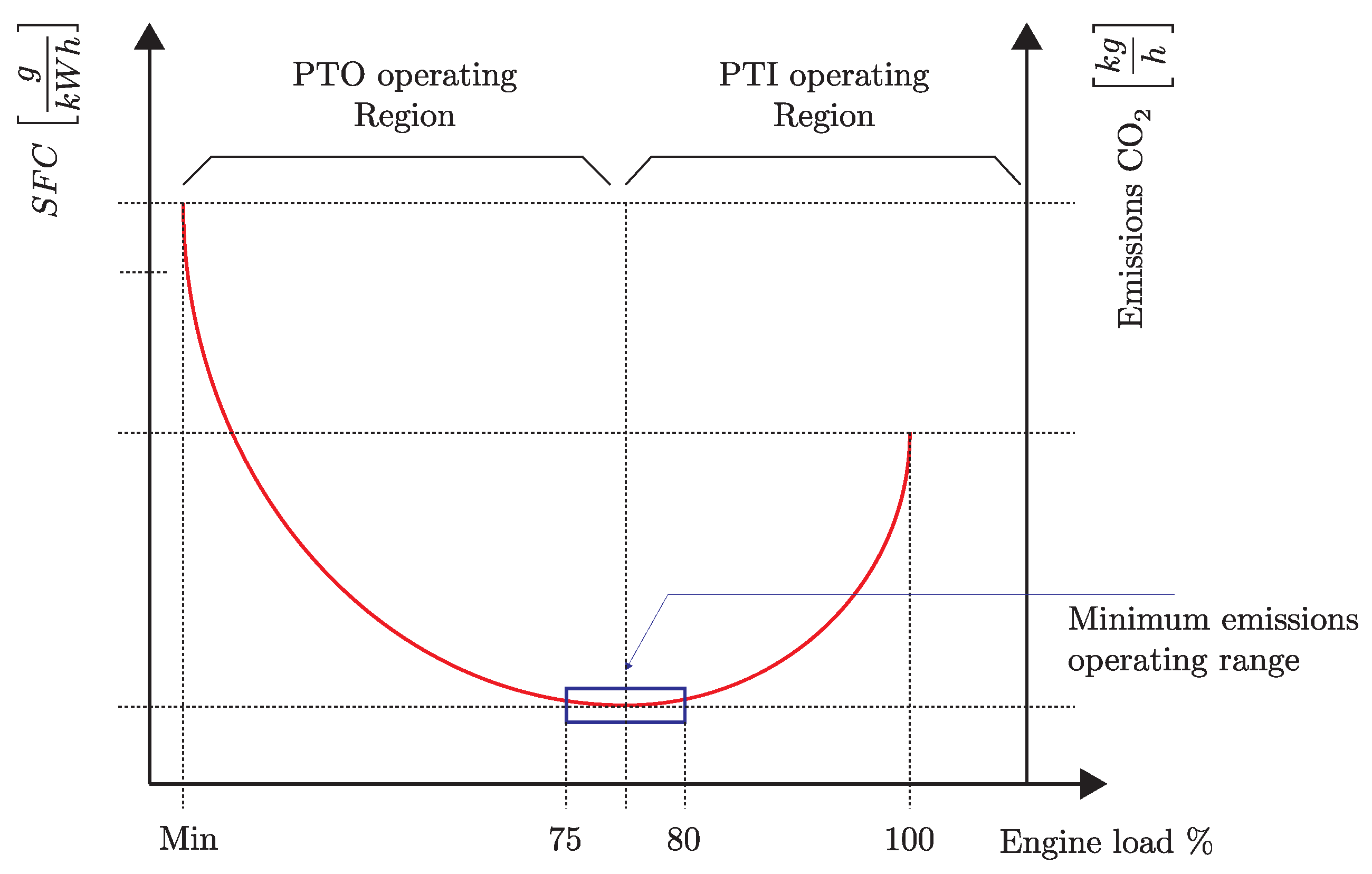
As presented, the indicated torque is highly dependent on several engine parameters, such as the number of cylinders, the fuel delivery per cycle, the compression ratio, and combustion chamber efficiency. On the other hand, the diesel engine emissions are defined by its residual gas fraction
, which represents a measure of CO
concentrations of the working gas in the compression stroke, during the energy conversion process, as defined in Equation (
14)
where
and
stands for the CO
fractions during compression and exhaust, respectively.
The torque component corresponding to energy losses
is given by Equations (
15) and (
16)
where the pumping torque
and friction torque
can be expressed as in Equations (
17) and (
18), respectively.
here
corresponds to the engine displacement volume,
is the exhaust pressure to the manifold, and
the manifold inlet pressure. The friction torque
,on the other hand, may be assumed to be a quadratic polynomial depended on the engine revolutions
, with
,
, and
fitting constants.
From Equations (
7)–(
17) it becomes self-evident that the diesel engine mathematical model is highly nonlinear and dependent on several specific construction parameters. However, a linearized model may be used, considering all important nonlinear characteristics [
17,
18,
19,
20], which can be modeled as dead-times and time-delays contained in
and
, respectively, and constant parameters
,
, as presented in Equations (
19)–(
20)
where
J stands for the engine’s inertia,
B is the friction coefficient,
corresponds to the engine rotational speed,
u to the speed controller output,
y the position of the fuel rail, and
the external load torque. Values for
,
,
, and
may be found empirically or from the data provided by the manufacturer using a model fitting algorithm, as stated in [
21].
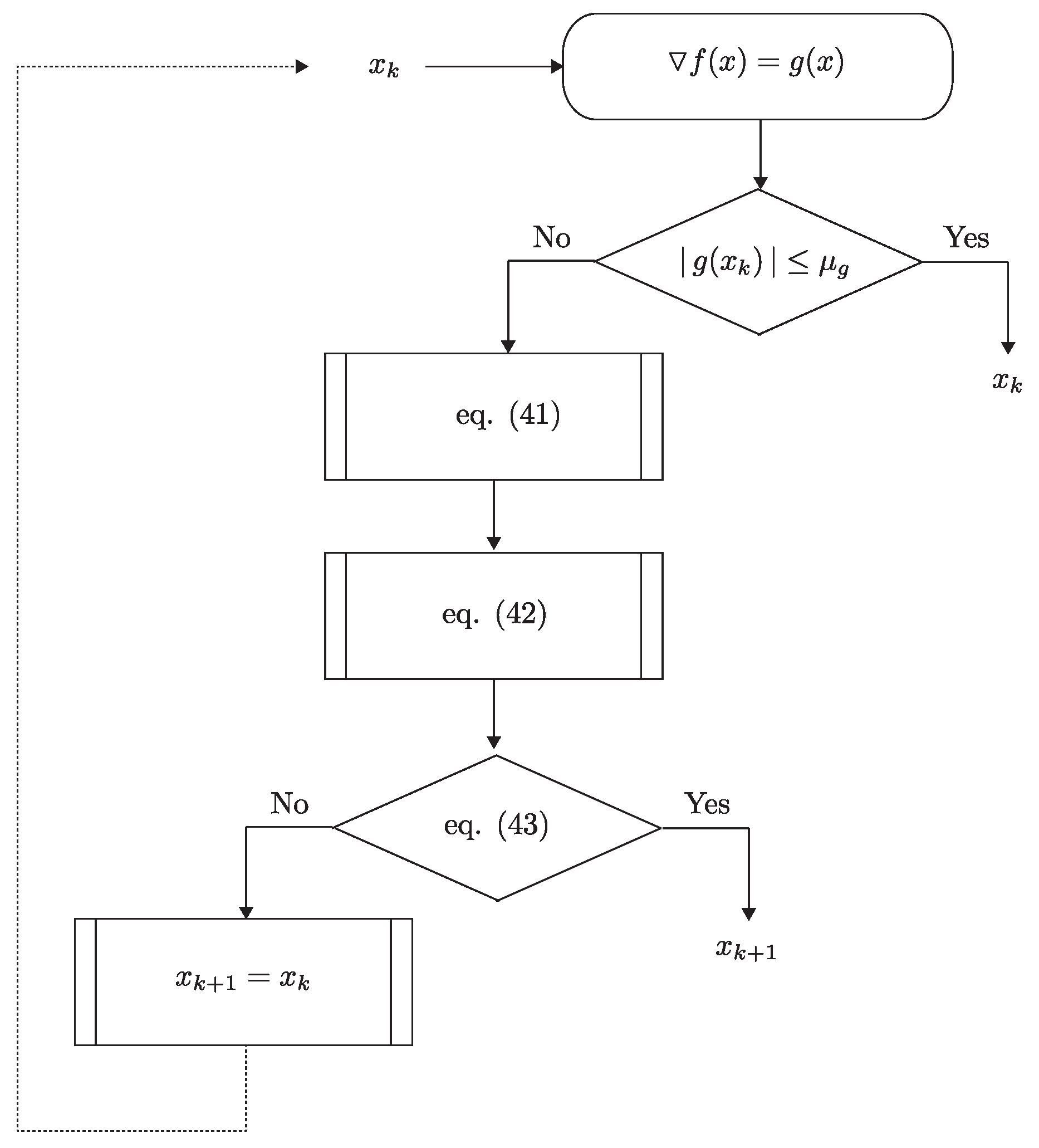
Considering the previously made considerations and modeling restrictions, it is possible to build an emissions model, on the basis of the data provided by the manufacturer, using an appropriate polynomial approximation with squares regression.
Given
m data points
with
given output power and
corresponding CO
2 emissions rate; the best fit polynomial for the CO
2 emissions
could be developed using Equation (
21)
where
coefficients may be found by minimizing the least square error using Equation (
22)
with the coefficients vector
, the sample value vector
, and
A the Vandermonde matrix, given as in Equations (
23) and (
24)
obtaining finally an
n degree polynomial representing the CO
2 emissions profile, as given in Equation (
25)
3.2. Electric Drive Model and Control
The anisotropic permanent magnet synchronous machine (PMSM) mathematical model in an arbitrary synchronous reference frame
is described as in Equations (
26) and (
27) [
22],
where
corresponds to the stator voltage,
to the stator resistance,
the stator current,
the stator flux linkages, and
to the shaft synchronous speed. The stator flux linkages are given as in Equations (
28) and (
29):
and
are the direct and quadrature reference frame inductances, respectively, and
the permanent magnet flux linkage. The electromechanical torque developed by the PMSM is given in Equations (
30) and (
31)
where
p are the number of pole pairs.
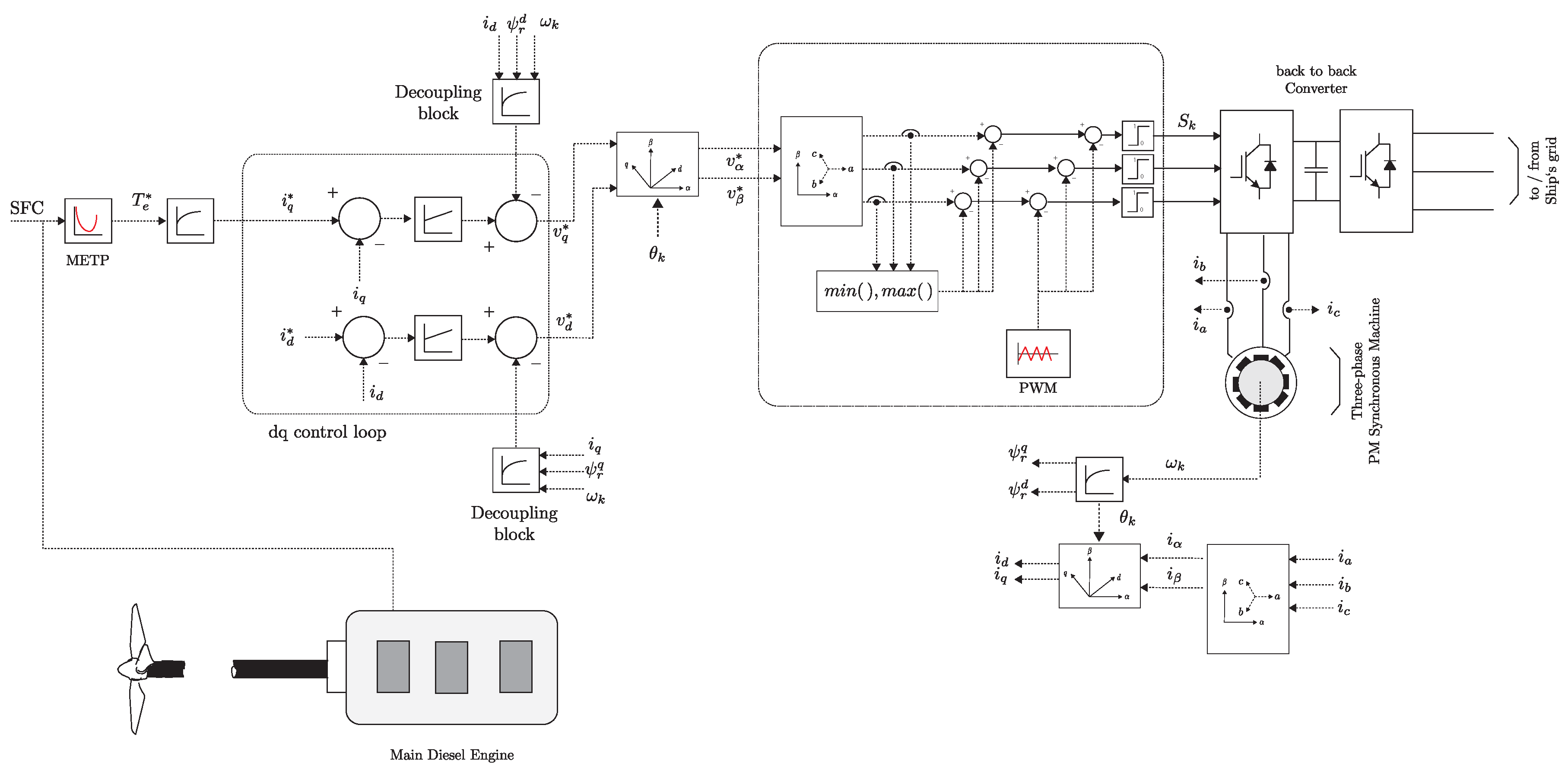
Despite the classical FOC control scheme, which is used to control the drive shaft speed, in this case, the control objective is to control the torque developed by the electric drive [
23], which is achieved by means of the electric torque reference, provided by the optimization algorithm output. The implementation of the electric drive control scheme is shown in
Figure 4.
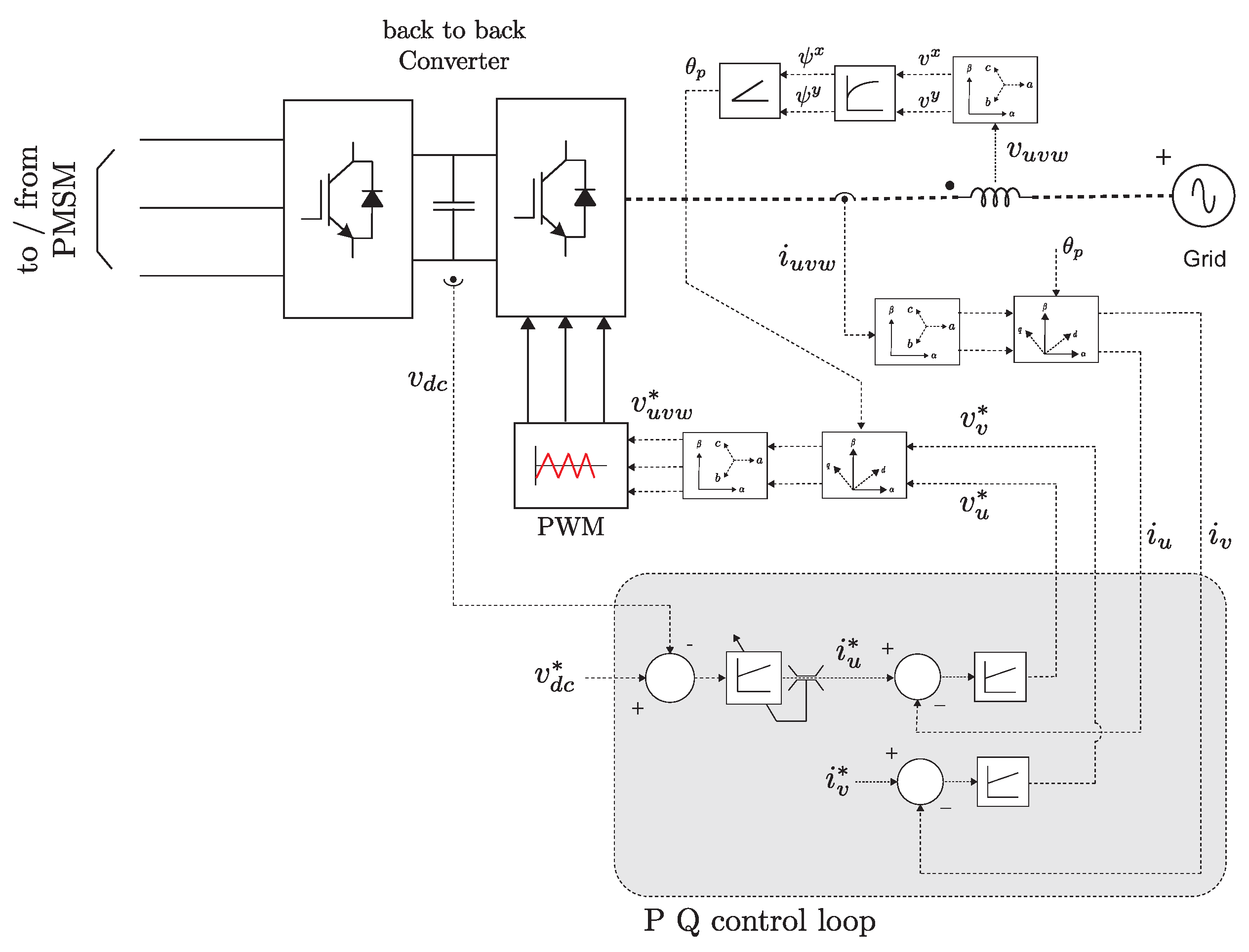
3.3. Grid Side Power Flow Control
Grid side control is achieved by implementing active and reactive power control [
24,
25], using a virtual flux voltage oriented control (VF-VOC) strategy. Active and reactive power,
P and
Q, respectively, in a synchronous rotating reference frame, grid side-oriented
are given in Equations (
32) and (
33), as a result of using a voltage orientation in
u coordinate.
Thus, by setting the reactive component of the grid current
it is possible to maximize the active power flow into the grid. Orientation into the grid side synchronous reference frame
is achieved by extracting the orientation angle
provided by a virtual-flux space vector
referred to the voltage drop in the output inductance
as in Equations (
34) and (
35). Implementation of the grid side control scheme is provided in
Figure 5.
The corresponding grid side dynamic model in the
synchronous reference frame, is given in Equation (
36),
where
corresponds to the converter output voltage,
stands for the grid side current, and
to the main busbar voltage, in the
reference frame. Line parameters of resistance and inductance are given as
R and
L, respectively, and matrix
has been defined in Equation (
27).





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}