3D Numerical Simulations of Green Water Impact on Forward-Speed Wigley Hull Using Open Source Codes

Abstract
:1. Introduction
2. Mathematical Model and Numerical Method
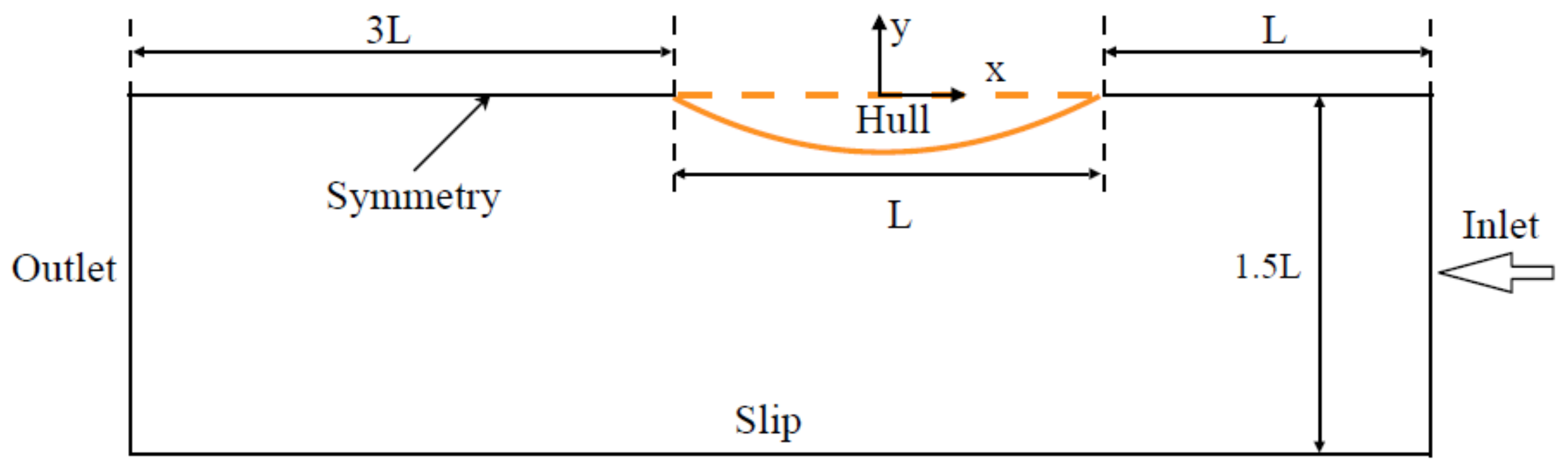
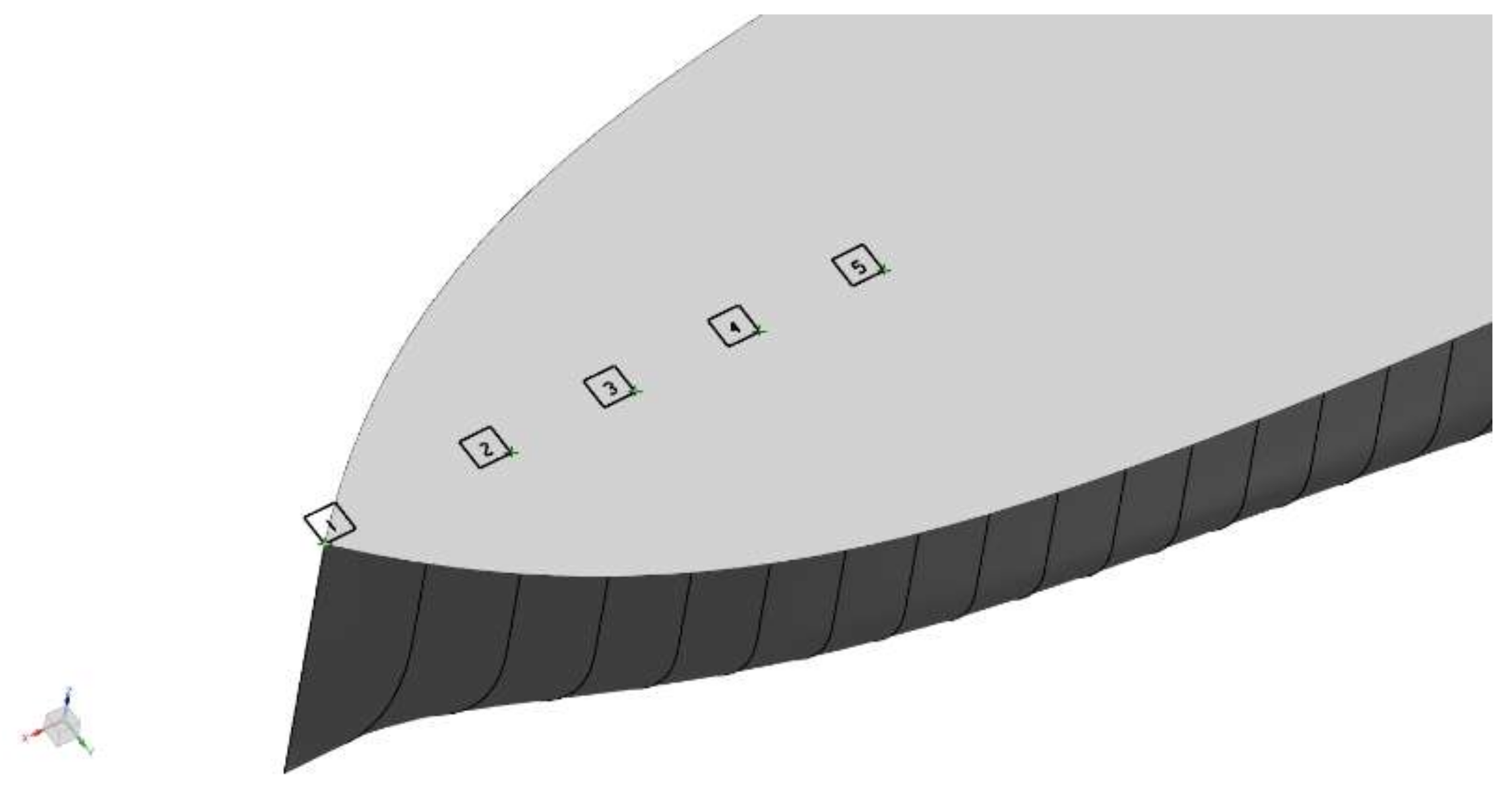
3. Problem Setup
4. Results and Discussions
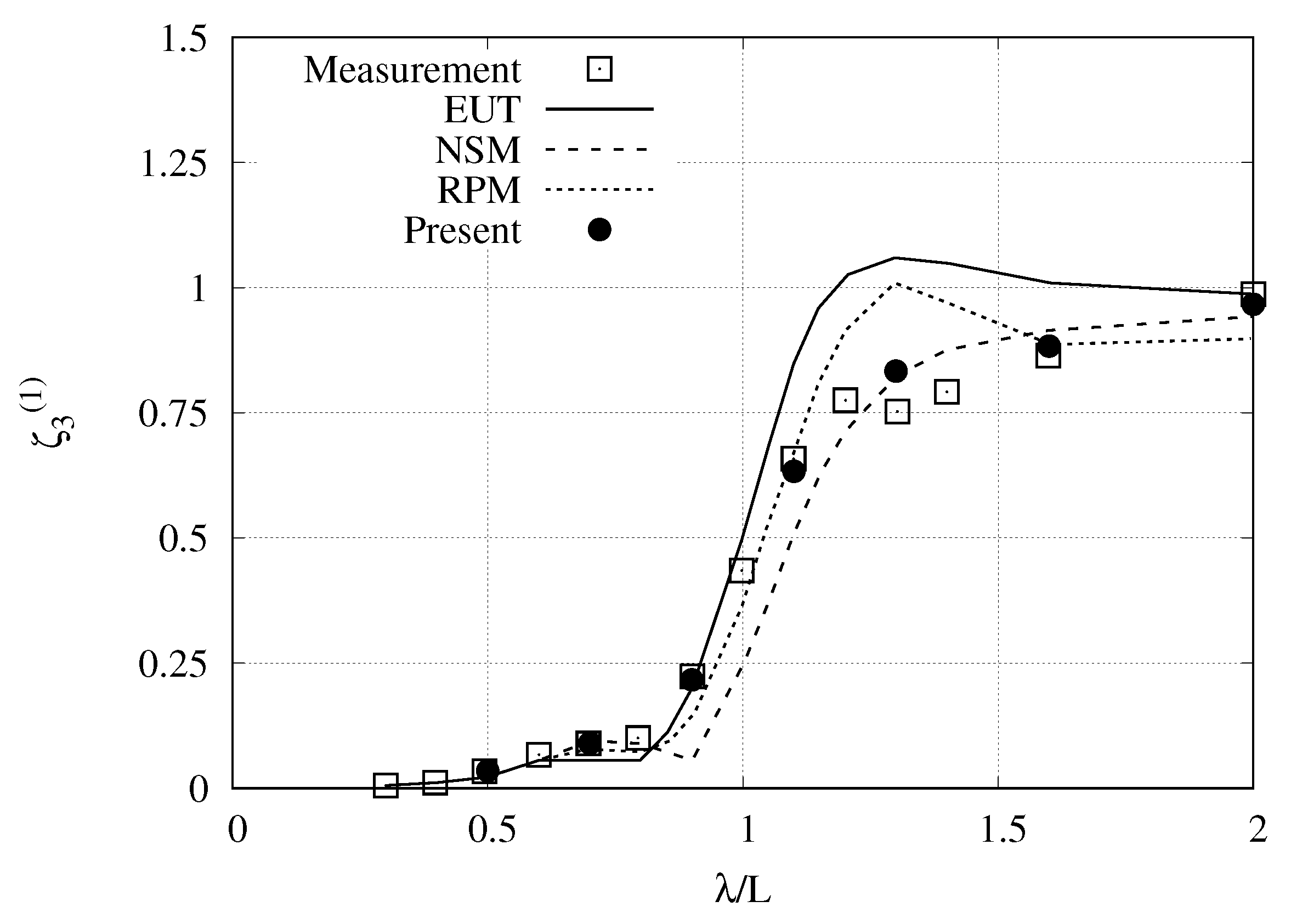
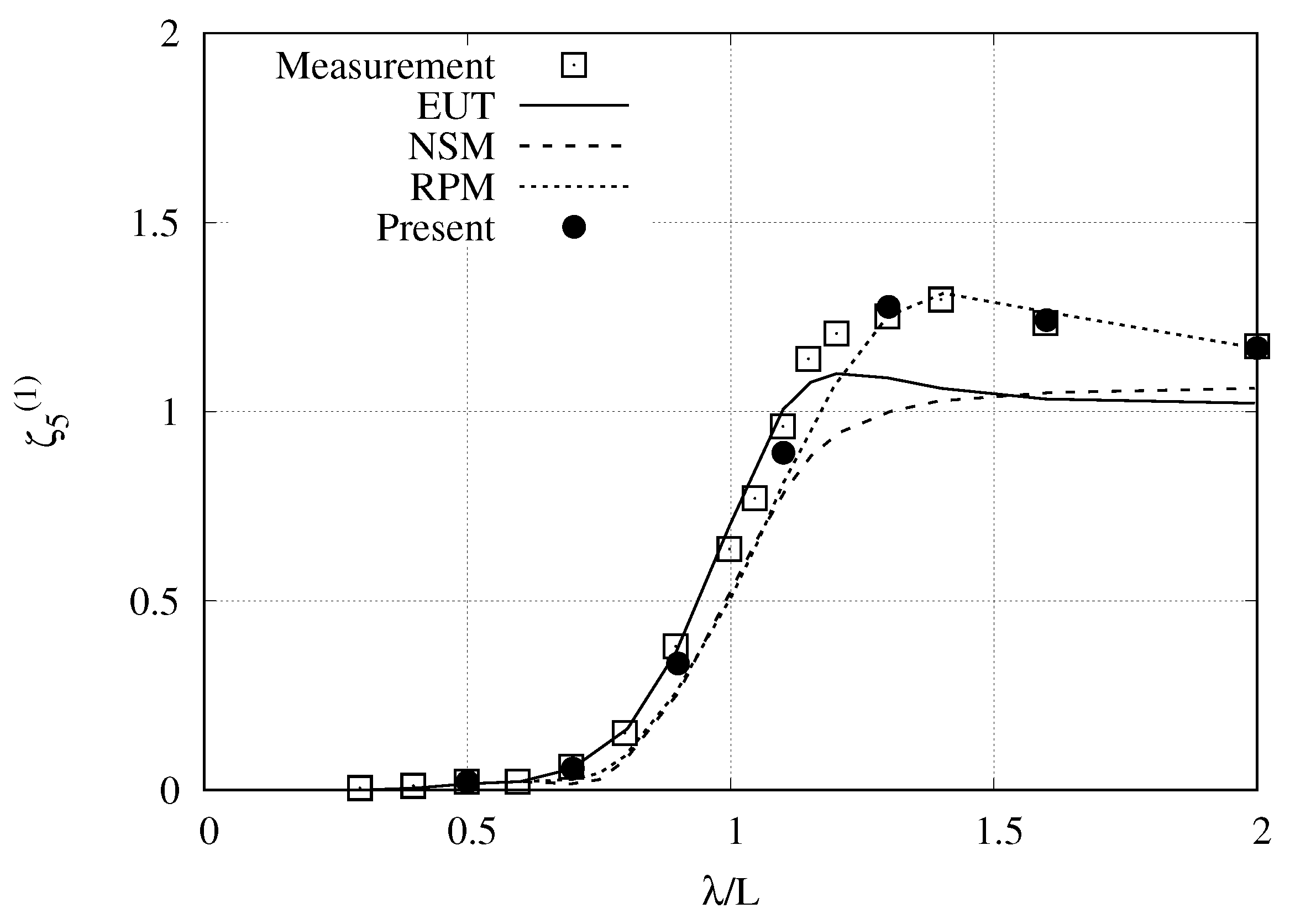
4.1. Code Validation
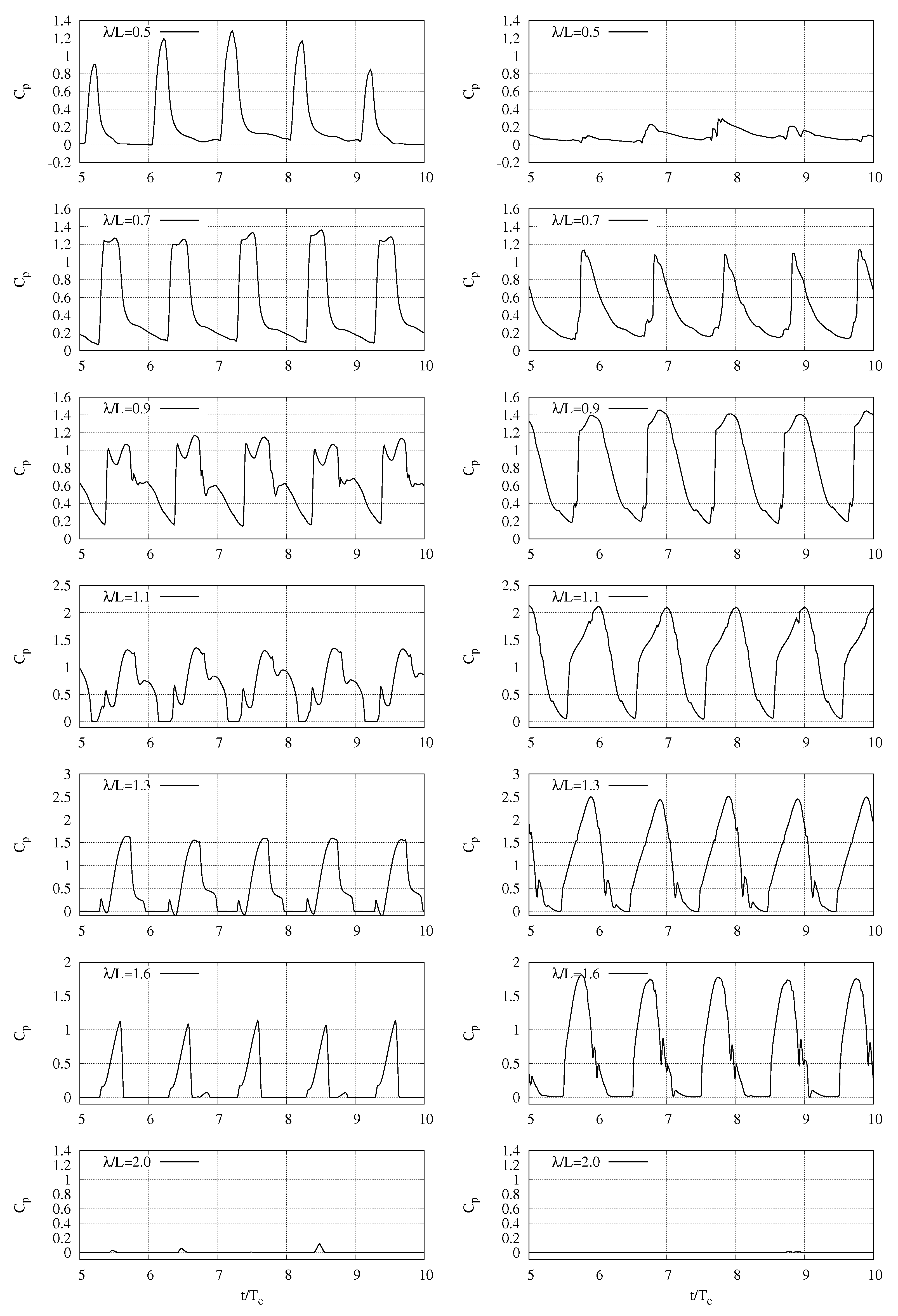
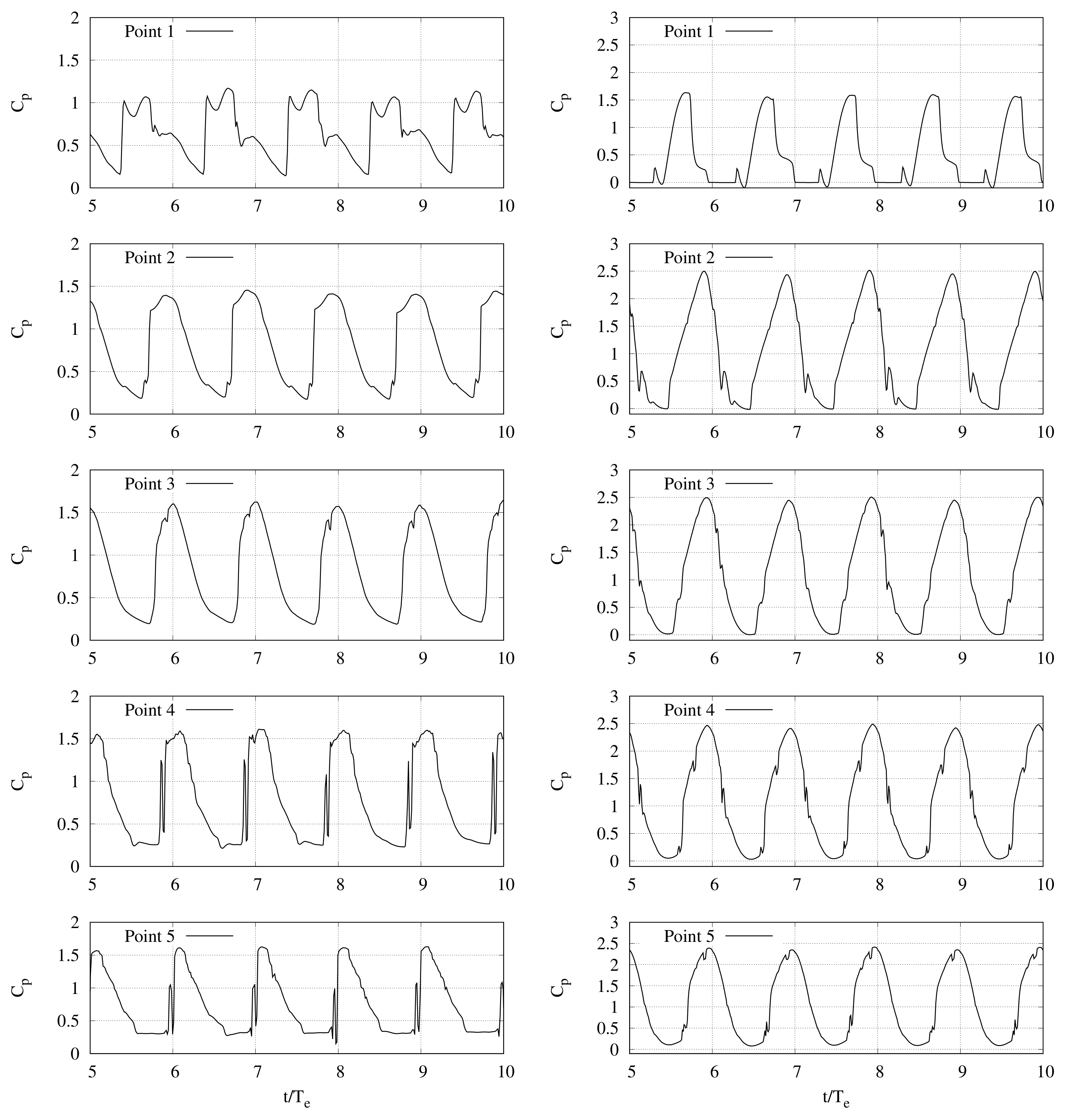
4.2. Green Water on Decks
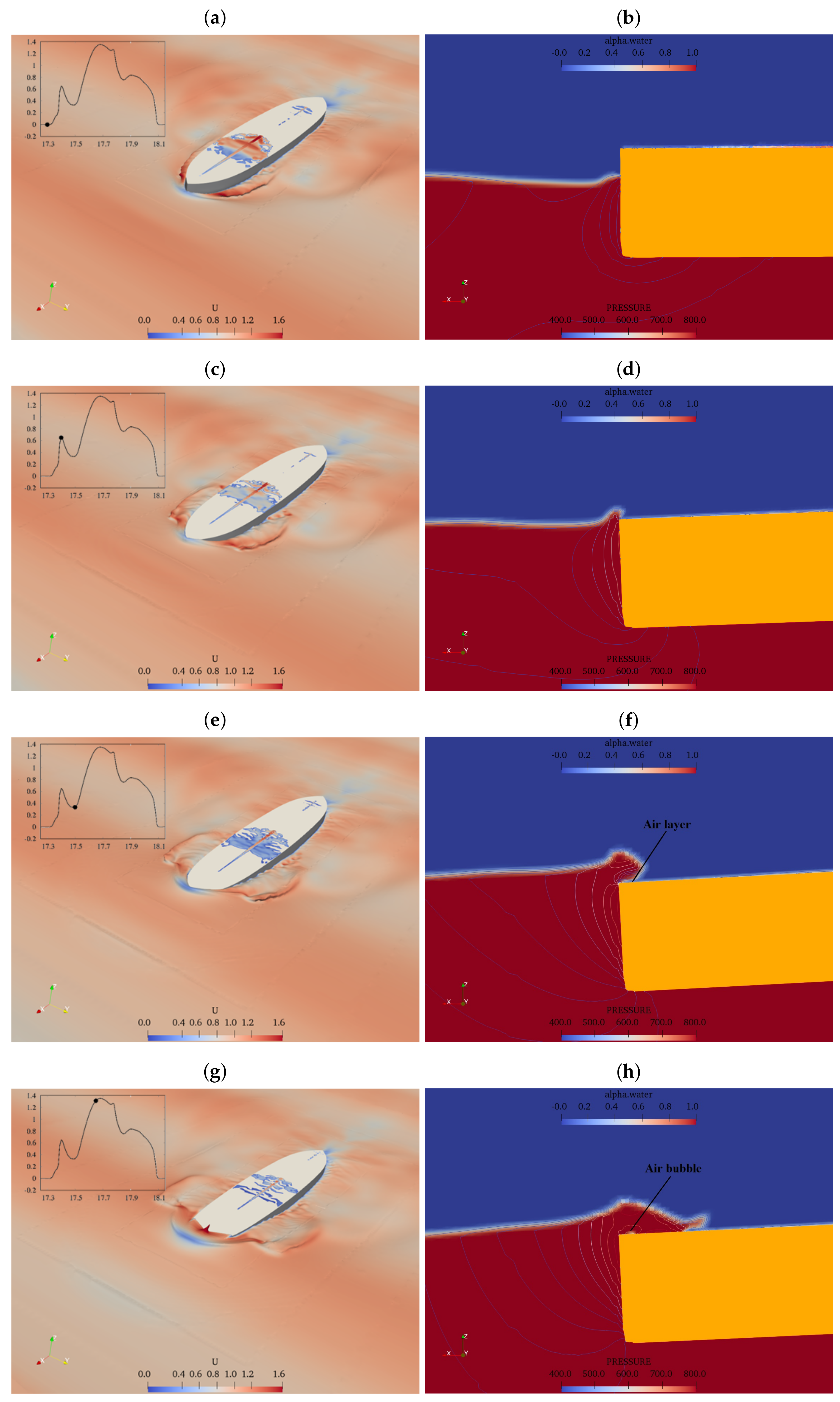
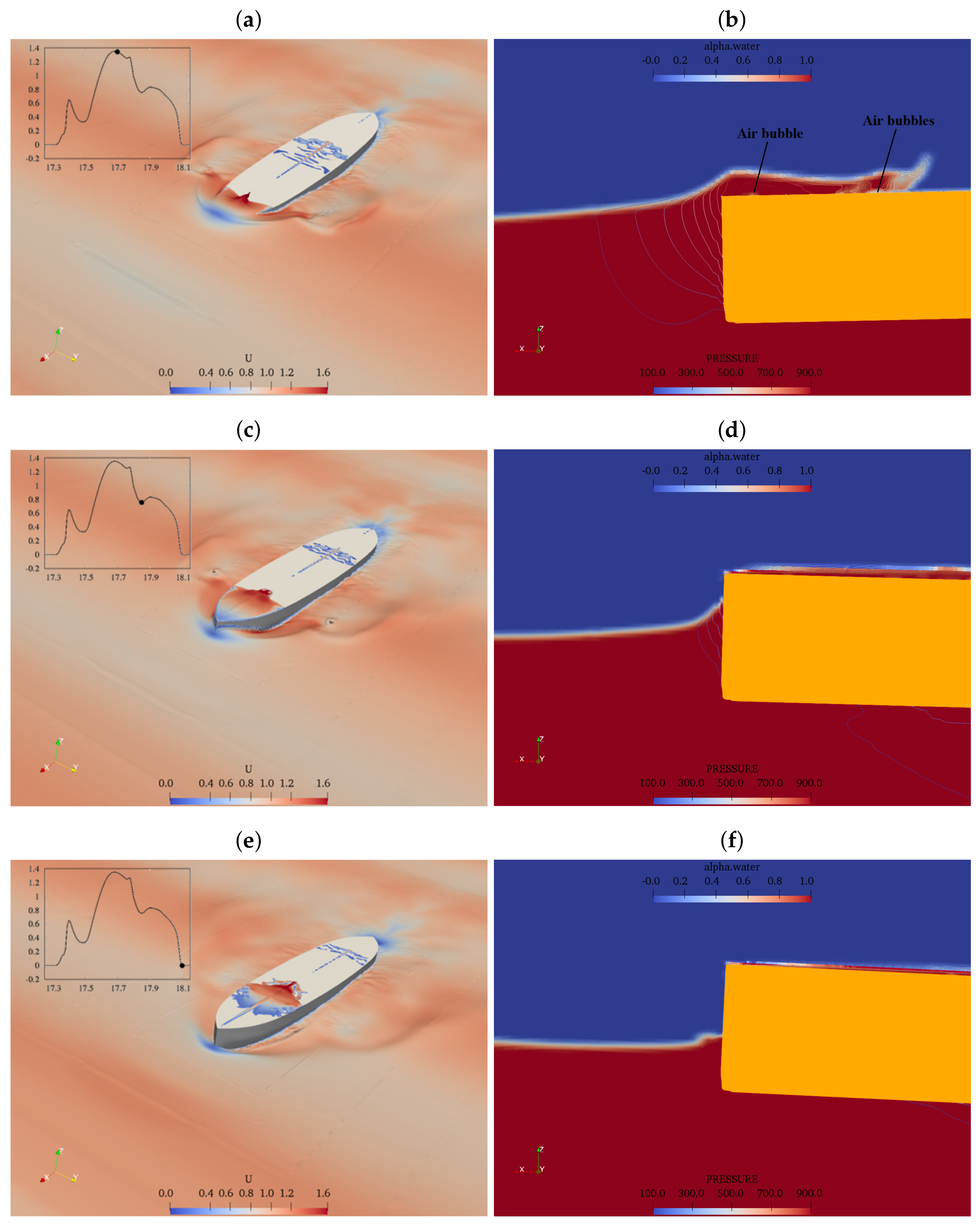
4.3. Flow Visualization
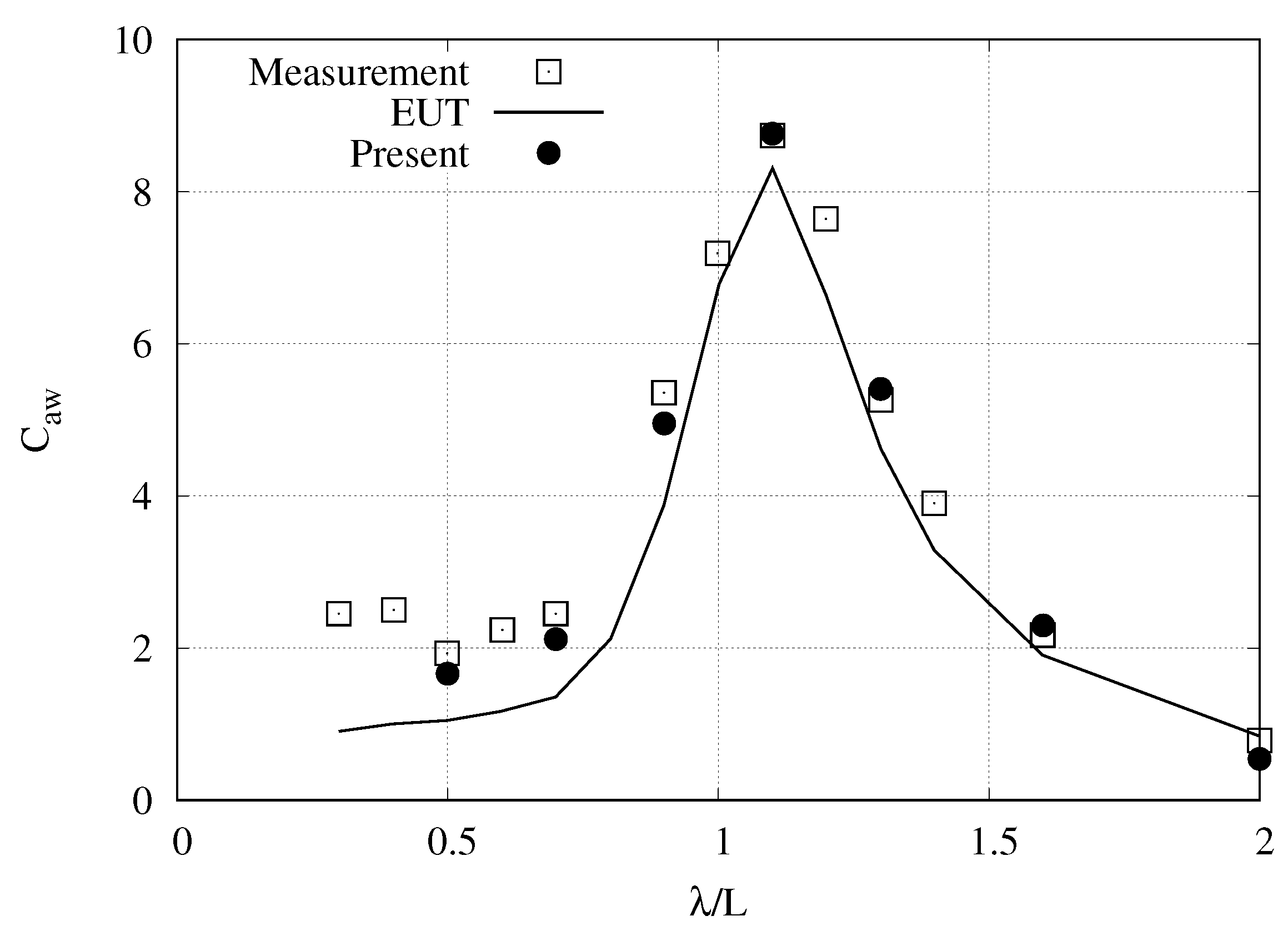
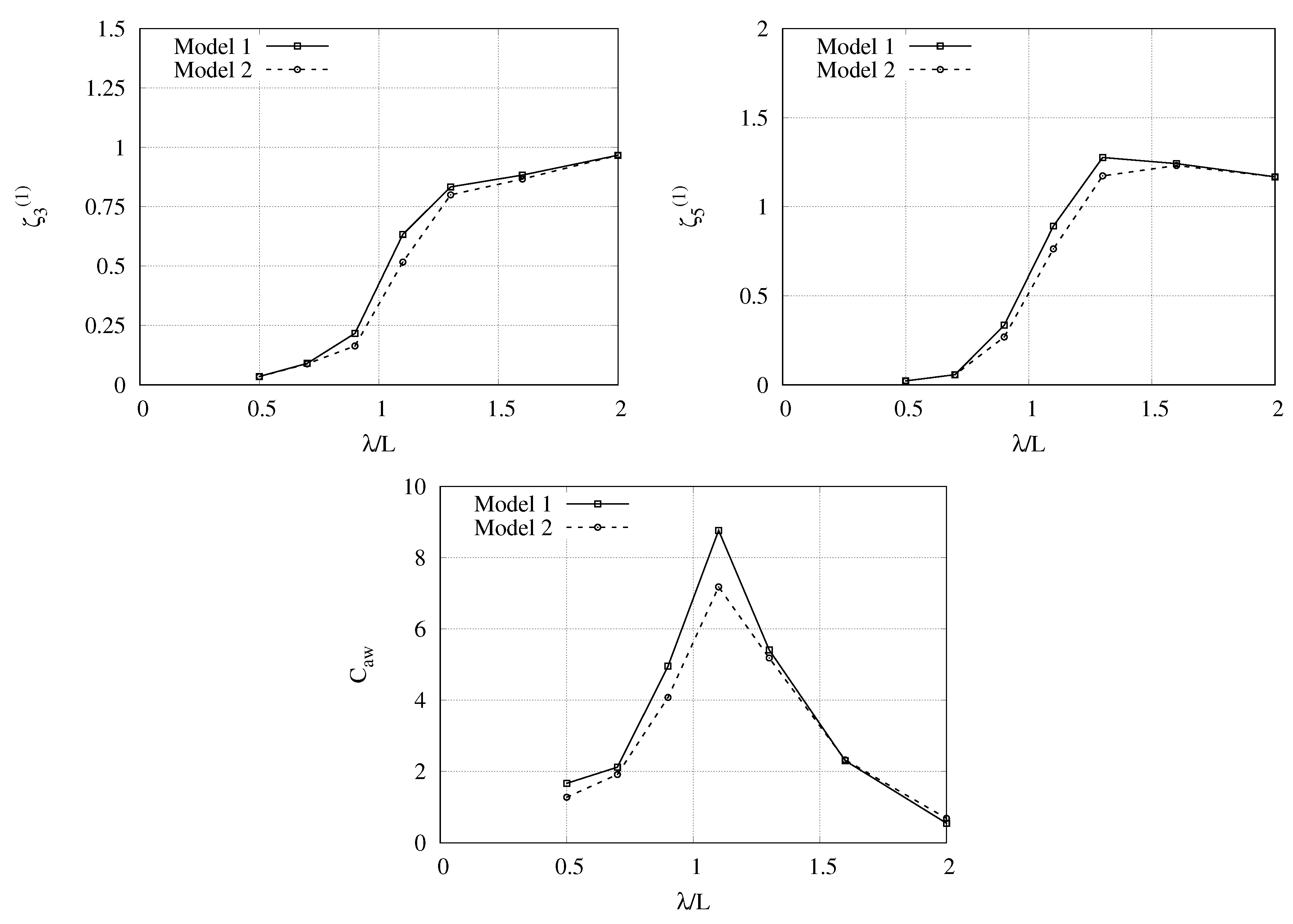
4.4. Motion Quantities and Added Resistance
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- He, G.; Zhang, Z.; Tian, N.; Wang, Z. Nonlinear analysis of green water impact on forward-speed Wigley hull. In Proceedings of the 27th International Offshore and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017. [Google Scholar]
- Chen, L.; Taylor, P.H.; Draper, S.; Wolgamot, H. 3-D numerical modelling of greenwater loading on fixed ship-shaped FPSOs. J. Fluids Struct. 2019, 84, 283–301. [Google Scholar] [CrossRef]
- Buchner, B. Green Water on Ship-Type Offshore Structures. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2002. [Google Scholar]
- Schiller, R.; Pakozdi, C.; Stansberg, C.; Yuba, D.; Carvalho, D. Green water on FPSO predicted by a practical engineering method and validated agianst model test data for irregular waves. In Proceedings of the ASME International Conference on Ocean, Offshore and Arctic Engineering—OMAE, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Wang, S.; Wang, X.; Woo, W.L.; Seow, T.H. Study on green water prediction for FPSOs by a practical numerical approach. Ocean Eng. 2017, 143, 88–96. [Google Scholar] [CrossRef] [Green Version]
- Cox, D.T.; Scott, C.P. Exceedance probability for wave overtopping on a fixed deck. Ocean Eng. 2001, 28, 707–721. [Google Scholar] [CrossRef]
- Ogawa, Y.; Minami, M.; Tanizawa, K.; Kumano, A.; Matsunami, R.; Hayashi, T. Shipping water load due to deck wetness. In Proceedings of the Twelfth International Offshore and Polar Engineering Conference, Kitakyushu, Japan, 26–31 May 2002. [Google Scholar]
- Soares, C.G.; Fonseca, N.; Pascoal, R. Experimental and numerical study of the motions of a turret moored FPSO in waves. J. Offshore Mech. Arct. Eng. 2004, 127, 197–204. [Google Scholar] [CrossRef]
- Werter, R. Green Water Along the Side of an FPSO. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2016. [Google Scholar]
- Buchner, B. The impact of green water on FPSO design. In Proceedings of the 27th Offshore Technology Conference, Houston, TX, USA, 1–4 May 1995. [Google Scholar]
- Schonberg, T.; Rainey, R.C.T. A hydrodynamic model of green water incidents. Appl. Ocean Res. 2002, 24, 299–307. [Google Scholar] [CrossRef]
- Yilmaz, O.; Incecik, A.; Han, J. Simulation of green water flow on deck using non-linear dam breaking theory. Ocean Eng. 2003, 30, 601–610. [Google Scholar] [CrossRef]
- Ryu, Y.; Chang, K.A.; Mercier, R. Application of dam-break flow to green water prediction. Appl. Ocean Res. 2007, 29, 128–136. [Google Scholar] [CrossRef]
- Pakozdi, C.; de Carvalho e Silva, D.; Ostman, A.; Stansberg, C. Green water on FPSO analyzed by a coupled potential-flow-NS-VOF method. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering—OMAE, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Zhou, Z.; Kat, J.; Buchner, B. A nonlinear 3-D approach to simulate green water dynamics on deck. In Proceedings of the Seventh International Conference on Numerical Ship Hydrodynamics, Nantes, France, 19–22 July 1999. [Google Scholar]
- Greco, M.; Lugni, C. 3-D seakeeping analysis with water on deck and slamming. Part 1: Numerical solver. J. Fluids Struct. 2012, 33, 127–147. [Google Scholar] [CrossRef]
- Zhang, S.; Yue, D.K.P.; Tanizawa, K. Simulation of plunging wave impact on a vertical wall. J. Fluid Mech. 1996, 327, 221–254. [Google Scholar] [CrossRef]
- Greco, M. A Two-Dimensional Study of Green-Water Loading. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2001. [Google Scholar]
- Pham, X.P.; Varyani, K.S. Evaluation of green water loads on high-speed containership using CFD. Ocean Eng. 2005, 32, 571–585. [Google Scholar] [CrossRef]
- Greco, M.; Colicchio, G.; Faltinsen, O.M. Shipping of water on a two-dimensional structure. Part 2. J. Fluid Mech. 2007, 581, 371–399. [Google Scholar] [CrossRef]
- Shen, Z.; Wan, D. RANS computations of added resistance and motions of a ship in head waves. Int. J. Offshore Polar Eng. 2013, 23, 263–271. [Google Scholar]
- Nielsen, K.B.; Mayer, S. Numerical prediction of green water incidents. Ocean Eng. 2004, 31, 363–399. [Google Scholar] [CrossRef]
- Lu, H.; Yang, C.; L?hner, R. Numerical studies of green water impact on fixed and moving bodies. Int. J. Offshore Polar Eng. 2012, 22, 123–132. [Google Scholar]
- Zhao, X.; Hu, C. Numerical and experimental study on a 2-D floating body under extreme wave conditions. Appl. Ocean Res. 2012, 35, 1–13. [Google Scholar] [CrossRef]
- Zha, R.; YE, H.; Shen, Z.; Wan, D. Numerical computations of resistance of high speed catamaran in calm water. J. Hydrodyn. 2014, 26, 930–938. [Google Scholar] [CrossRef]
- Ostman, A.; Sileo, C.; Stansberg, C.; Fonseca de Carvalho e Silva, D. A fully nonlinear RANS-VOF numerical wave tank applied in the analysis of green water on FPSO in waves. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering—OMAE, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Kim, M.; Hizir, O.; Turan, O.; Incecik, A. Numerical studies on added resistance and motions of KVLCC2 in head seas for various ship speeds. Ocean Eng. 2017, 140, 466–476. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Hino, T.; Ma, N.; Gu, X. RANS investigation of influence of wave steepness on ship motions and added resistance in regular waves. J. Mar. Sci. Technol. 2018, 23, 991–1003. [Google Scholar] [CrossRef] [Green Version]
- Kashiwagi, M. Hydrodynamic study on added resistance using unsteady wave analysis. J. Mar. Sci. Technol. 2018, 23, 991–1003. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Hirt, C.; Nichols, B. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Newmark, N.M. A Method of Computation for Structural Dynamics. J. Eng. Mech. Div. 1959, 85, 67–94. [Google Scholar]
- Kashiwagi, M. Prediction of surge and its effect on added resistance by means of the enhanced unified theory. Trans. West-Jpn. Soc. Naval Archit. 1995, 89, 77–89. [Google Scholar]
- Iwashita, H.; Ito, A. Seakeeping computations of a blunt ship capturing the influence of the steady flow. J. Ship Technol. Res. 1998, 45, 159–171. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length between perpendiculars, L (m) | 2.5 |
| Waterline breadth, (m) | 0.5 |
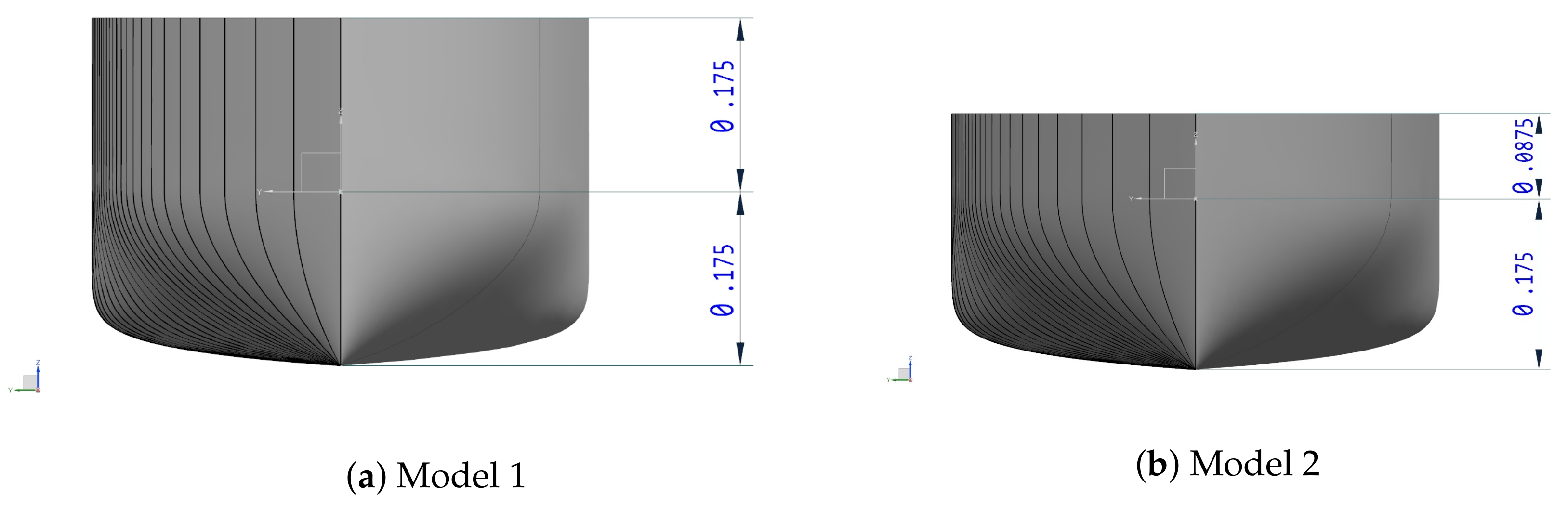
| Draft, (m) | 0.175 |
| Displacement volume, V (m) | 0.139 |
| Height of gravity center, (m) | 0.145 |
| Gyration radius in pitch, | 0.236 |
| Freeboard height, f (m) | 0.175 (model 1), 0.0875 (model 2) |
| Froude Number, | Wave Amplitude, | Wave Length, | Wave Steepness, | Encounter Frequency, |
|---|---|---|---|---|
| 0.5 | 0.048 | 11.998 | ||
| 0.7 | 0.0343 | 9.49 | ||
| 0.9 | 0.02667 | 7.996 | ||
| 0.2 | 0.012 | 1.1 | 0.0218 | 6.994 |
| 1.3 | 0.01846 | 6.267 | ||
| 1.6 | 0.015 | 5.48 | ||
| 2.0 | 0.012 | 4.75 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Wang, Y.; Wang, X.; Cao, X. 3D Numerical Simulations of Green Water Impact on Forward-Speed Wigley Hull Using Open Source Codes. J. Mar. Sci. Eng. 2020, 8, 327. https://doi.org/10.3390/jmse8050327
Chen L, Wang Y, Wang X, Cao X. 3D Numerical Simulations of Green Water Impact on Forward-Speed Wigley Hull Using Open Source Codes. Journal of Marine Science and Engineering. 2020; 8(5):327. https://doi.org/10.3390/jmse8050327
Chicago/Turabian StyleChen, Linfeng, Yitao Wang, Xueliang Wang, and Xueshen Cao. 2020. "3D Numerical Simulations of Green Water Impact on Forward-Speed Wigley Hull Using Open Source Codes" Journal of Marine Science and Engineering 8, no. 5: 327. https://doi.org/10.3390/jmse8050327
APA StyleChen, L., Wang, Y., Wang, X., & Cao, X. (2020). 3D Numerical Simulations of Green Water Impact on Forward-Speed Wigley Hull Using Open Source Codes. Journal of Marine Science and Engineering, 8(5), 327. https://doi.org/10.3390/jmse8050327