Prediction of Jacking Force in Vertical Tunneling Projects Based on Neuro-Genetic Models


Abstract
:1. Introduction
2. Case Study and Data Source
2.1. Construction Process
2.2. Factors Affecting Jacking Force
2.2.1. Tunnel Geometry Factors
2.2.2. The Geological Factor
2.2.3. Jacking Operation Factors
3. Intelligent Methods for Predicting Jacking Force
3.1. Artificial Neural Network
3.2. Genetic Algorithm
4. Results and Discussion
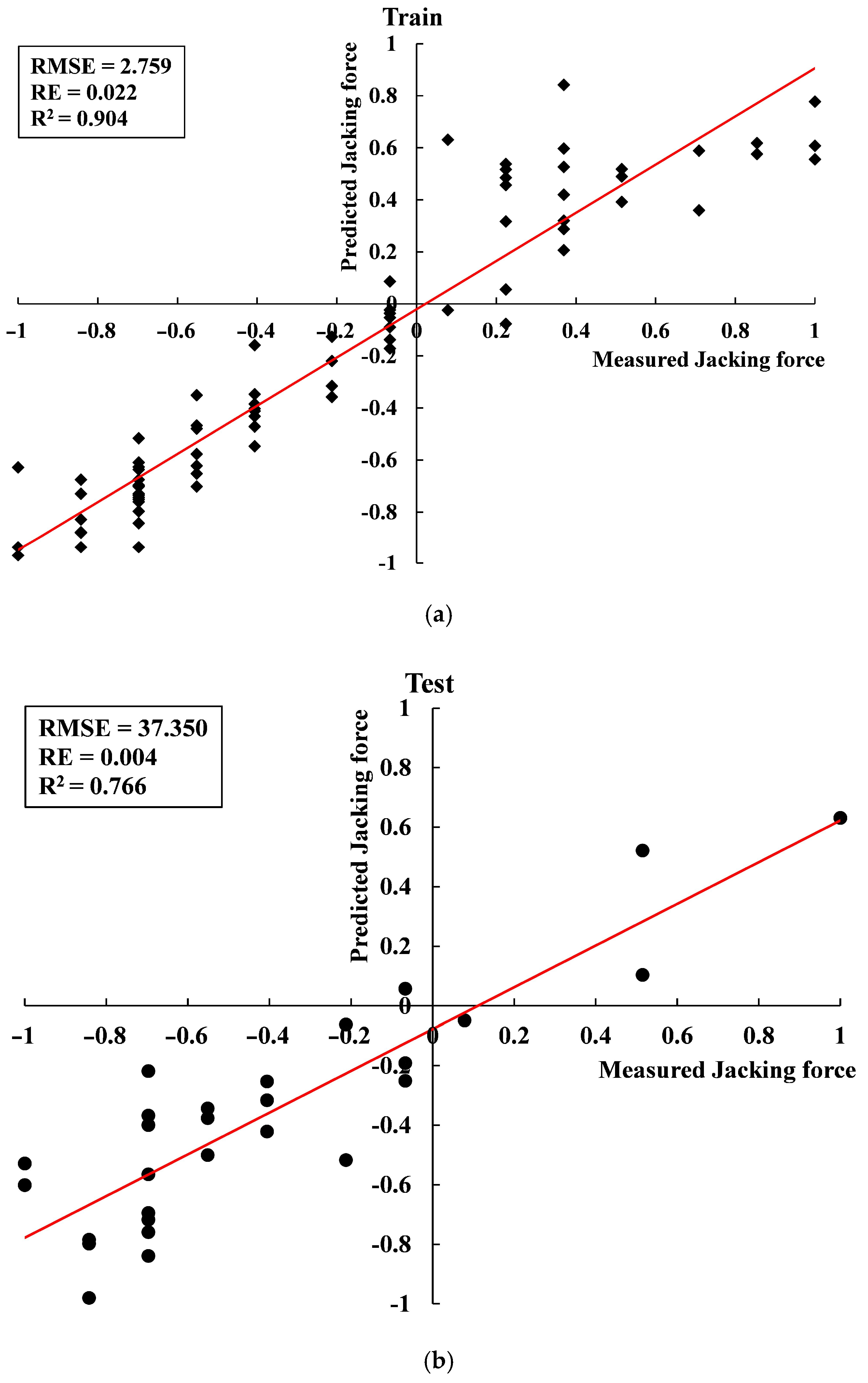
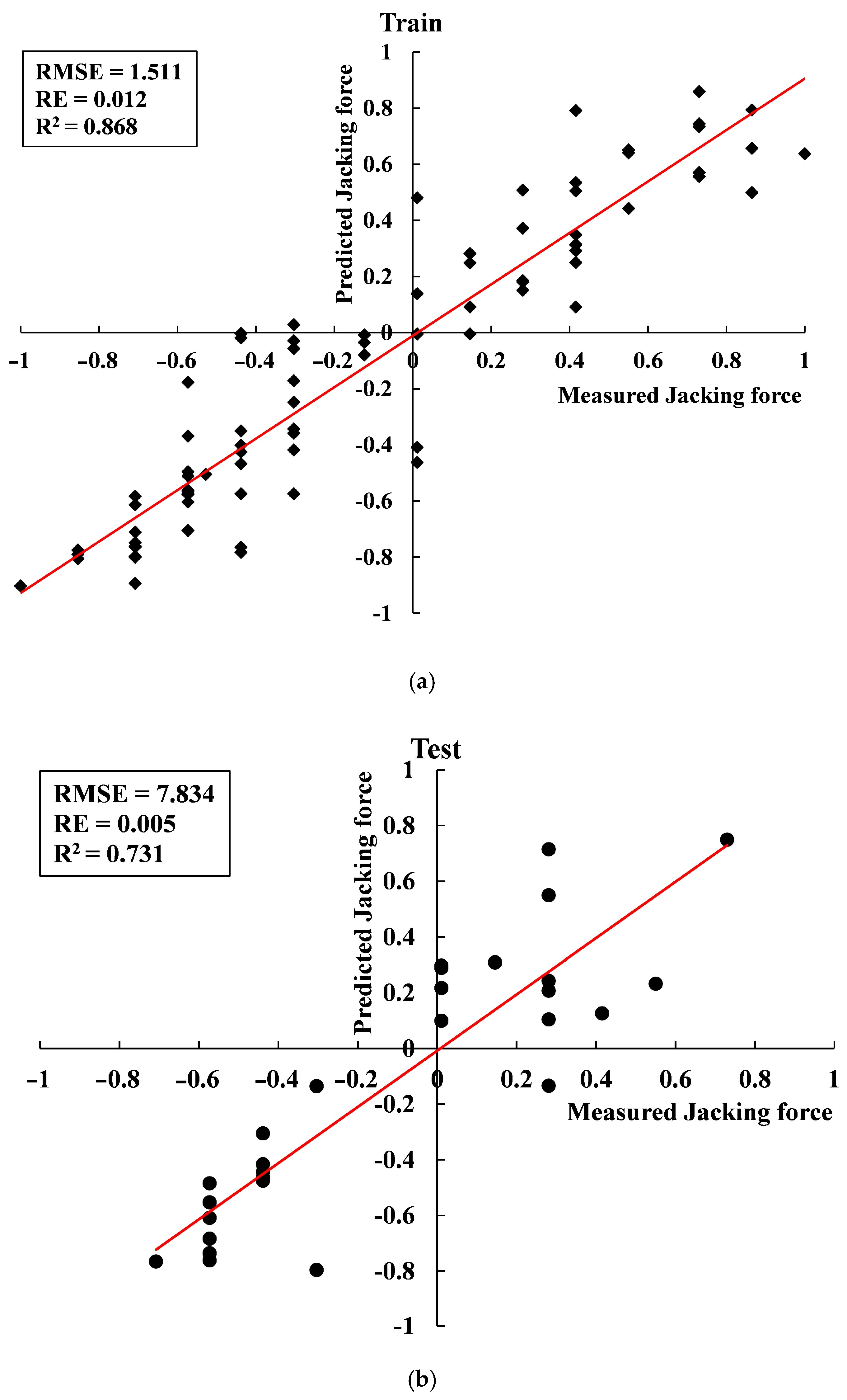
4.1. Evaluation of the Results
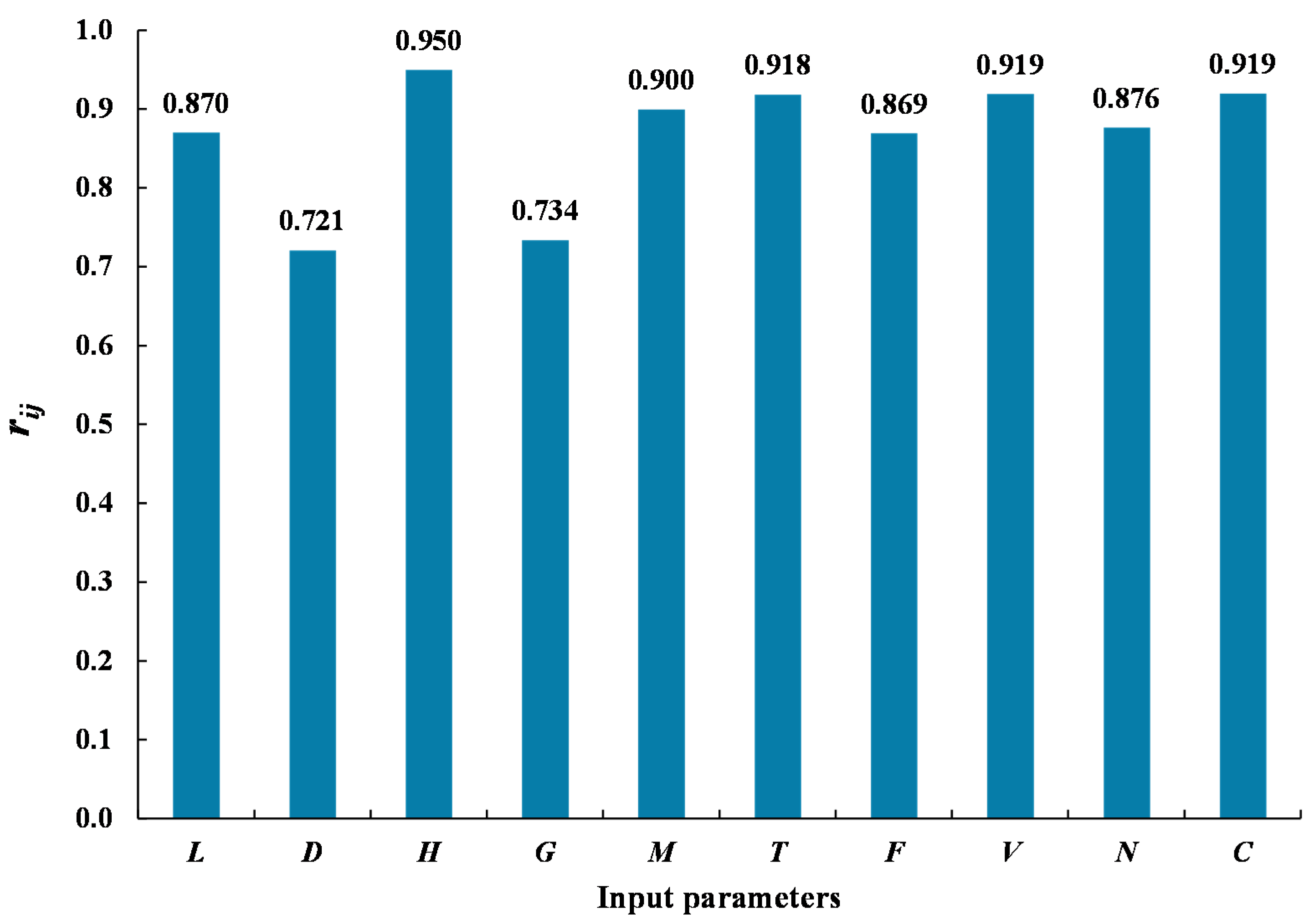
4.2. Parametric Sensitivity Analysis
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, L.Z.; Sun, L.W.; Wang, Z.; Zhang, J. Field monitoring of a subsea shield tunnel during standpipe lifting. Tunn. Undergr. Space Technol. 2015, 45, 52–62. [Google Scholar] [CrossRef]
- Wang, L.Z.; Wang, Z.; Li, L.L.; Wang, J.C. Construction behavior simulation of a hydraulic tunnel during standpipe lifting. Tunn. Undergr. Space Technol. 2011, 26, 674–685. [Google Scholar] [CrossRef]
- Wang, X.; Behbahani, S.S.; Iseley, T.; Azimi, M.; Wei, X.; Wei, G.; Shi, Y. Vertical tunneling in China—A case study of a hydraulic tunnel in beihai. Tunn. Undergr. Space Technol. 2021, 107, 103650. [Google Scholar] [CrossRef]
- Pellet-Beaucour, A.L.; Kastner, R. Experimental and analytical study of friction forces during microtunneling operations. Tunn. Undergr. Space Technol. 2002, 17, 83–97. [Google Scholar] [CrossRef]
- Cheng, W.C.; Ni, J.C.; Shen, J.S.L.; Huang, H.W. Investigation into factors affecting jacking force: A case study. Proc. Inst. Civ. Eng. Geotech. Eng. 2017, 170, 322–334. [Google Scholar] [CrossRef]
- Choo, C.S.; Ong, D.E.L. Evaluation of pipe-jacking forces based on direct shear testing of reconstituted tunneling rock spoils. J. Geotech. Geoenviron. Eng. 2015, 141, 04015044. [Google Scholar] [CrossRef] [Green Version]
- Koopialipoor, M.; Armaghani, D.J.; Haghighi, M.; Ghaleini, E.N. A neuro-genetic predictive model to approximate overbreak induced by drilling and blasting operation in tunnels. Bull. Eng. Geol. Environ. 2019, 78, 981–990. [Google Scholar] [CrossRef]
- Armaghani, D.J.; Koopialipoor, M.; Marto, A.; Yagiz, S. Application of several optimization techniques for estimating tbm advance rate in granitic rocks. J. Rock Mech. Geotech. Eng. 2019, 11, 779–789. [Google Scholar] [CrossRef]
- Wang, Z.-F.; Cheng, W.-C. Predicting jet-grout column diameter to mitigate the environmental impact using an artificial intelligence algorithm. Undergr. Space 2020, in press. [Google Scholar] [CrossRef]
- Jahed Armaghani, D.; Hajihassani, M.; Yazdani Bejarbaneh, B.; Marto, A.; Tonnizam Mohamad, E. Indirect measure of shale shear strength parameters by means of rock index tests through an optimized artificial neural network. Measurement 2014, 55, 487–498. [Google Scholar] [CrossRef]
- Moghaddasi, M.R.; Noorian-Bidgoli, M. Ica-ann, ann and multiple regression models for prediction of surface settlement caused by tunneling. Tunn. Undergr. Space Technol. 2018, 79, 197–209. [Google Scholar] [CrossRef]
- Armaghani, D.J.; Mohamad, E.T.; Narayanasamy, M.S.; Narita, N.; Yagiz, S. Development of hybrid intelligent models for predicting tbm penetration rate in hard rock condition. Tunn. Undergr. Space Technol. 2017, 63, 29–43. [Google Scholar] [CrossRef]
- Rezaei, M.; Rajabi, M. Vertical displacement estimation in roof and floor of an underground powerhouse cavern. Eng. Fail. Anal. 2018, 90, 290–309. [Google Scholar] [CrossRef]
- Wang, X.; Lu, H.F.; Wei, X.J.; Wei, G.; Behbahani, S.S.; Iseley, T. Application of artificial neural network in tunnel engineering: A systematic review. IEEE Access 2020, 8, 119527–119543. [Google Scholar] [CrossRef]
- Hecht-Nielsen, R. In Kolmogorov’s mapping neural network existence theorem. In Proceedings of the International Conference on Neural Networks; IEEE Press: New York, NY, USA, 1987; pp. 11–14. [Google Scholar]
- Hush, D.R. In Classification with neural networks: A performance analysis. In Proceedings of the IEEE International Conference on Systems Engineering, Fairborn, OH, USA, 24–26 August 1989; pp. 277–280. [Google Scholar]
- Ripley, B.D. Statistical aspects of neural networks. In Networks and Chaos-Statistical and Probabilistic Aspects, 1st ed.; Chapman and Hall/CRC: London, UK, 1993; pp. 40–123. [Google Scholar]
- Paola, J. Neural Network Classification of Multispectral Imagery. Master’s Thesis, The University of Arizona, Tucson, AZ, USA, 1994. [Google Scholar]
- Wang, C. A Theory of Generalization in Learning Machines with Neural Network Applications; University of Pennsylvania: Philadelphia, PA, USA, 1994. [Google Scholar]
- Masters, T.; Schwartz, M. Practical neural network recipes in c. IEEE Trans. Neural Netw. 1994, 5, 853. [Google Scholar] [CrossRef]
- Kaastra, I.; Boyd, M. Designing a neural network for forecasting financial and economic time series. Neurocomputing 1996, 10, 215–236. [Google Scholar] [CrossRef]
- Kanellopoulos, I.; Wilkinson, G.G. Strategies and best practice for neural network image classification. Int. J. Remote Sens. 2010, 18, 711–725. [Google Scholar] [CrossRef]
- Haji Mohammad Hasan Mamaqani, B. Numerical Modeling of Ground Movements Associated with Trenchless Box Jacking Technique; The University of Texas at Arlington: Arlington, TX, USA, 2014. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1975. [Google Scholar]
- Goh, A.T.C. Search for critical slip circle using genetic algorithms. Civ. Eng. Environ. Syst. 2000, 17, 181–211. [Google Scholar] [CrossRef]
- Momeni, E.; Nazir, R.; Jahed Armaghani, D.; Maizir, H. Prediction of pile bearing capacity using a hybrid genetic algorithm-based ann. Measurement 2014, 57, 122–131. [Google Scholar] [CrossRef]
- Khandelwal, M.; Armaghani, D.J. Prediction of drillability of rocks with strength properties using a hybrid ga-ann technique. Geotech. Geol. Eng. 2015, 34, 605–620. [Google Scholar] [CrossRef]
- Zorlu, K.; Gokceoglu, C.; Ocakoglu, F.; Nefeslioglu, H.A.; Acikalin, S. Prediction of uniaxial compressive strength of sandstones using petrography-based models. Eng. Geol. 2008, 96, 141–158. [Google Scholar] [CrossRef]
- Rajabi, M.; Rahmannejad, R.; Rezaei, M.; Ganjalipour, K. Evaluation of the maximum horizontal displacement around the power station caverns using artificial neural network. Tunn. Undergr. Space Technol. 2017, 64, 51–60. [Google Scholar] [CrossRef]
- Salsani, A.; Daneshian, J.; Shariati, S.; Yazdani-Chamzini, A.; Taheri, M. Predicting roadheader performance by using artificial neural network. Neural Comput. Appl. 2014, 24, 1823–1831. [Google Scholar] [CrossRef]
- Koopialipoor, M.; Fallah, A.; Armaghani, D.J.; Azizi, A.; Mohamad, E.T. Three hybrid intelligent models in estimating flyrock distance resulting from blasting. Eng. Comput. 2018, 35, 243–256. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Boob, D.; Dey, S.S.; Lan, G. Complexity of training relu neural network. Discret. Optim. 2020, 100620. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Type | Water Content (%) | Unit Weight (kN·m3) | Cohesive Force (kPa) | Internal Friction Angle (°) | Compression Modulus (MPa) | Classification |
|---|---|---|---|---|---|---|
| Backfill | 30.90 | 19.33 | 11.1 | 4.20 | 4.36 | 1 |
| Low liquid limit clay | 22.48 | 19.6 | 47.44 | 13.23 | 12.03 | 2 |
| Silty sand | 21.07 | 18.86 | 7.6 | 18.30 | 6.34 | 3 |
| Silty clay | 39.60 | 16.96 | 7.72 | 4.39 | 2.89 | 4 |
| Poorly graded sand | 25.12 | 19.18 | 5.29 | 8.74 | 5.42 | 5 |
| Water | - | 9.8 | - | - | - | 6 |
| Classification | Parameter | Unit | Category | Min. | Max. | Ave. | Standard Deviation | NP |
|---|---|---|---|---|---|---|---|---|
| Tunnel geometry factors | Jacking distance (D) | m | Input | 0.5 | 12.5 | 6.5 | 3.63 | - |
| The thickness of overlaying soil (L) | m | Input | 0 | 11 | 5.07 | 3.53 | Yes | |
| The height of overlaying water (H) | m | Input | 13.41 | 25.41 | 19.41 | 3.63 | Yes | |
| Geological factor | Geological conditions (C) | - | Input | 1 | 6 | 4.75 | 1.02 | Yes |
| Jacking operation factors | The dead weight of standpipes (G) | kN | Input | 2.31 | 35.45 | 18.88 | 10.03 | Yes |
| The effective overburden soil pressure (F) | kN/m2 | Input | 0 | 100.97 | 46.09 | 32.26 | Yes | |
| The effective lateral soil pressure (N) | kN/m2 | Input | 0 | 87.57 | 47.09 | 26.35 | Yes | |
| Construction hours (T) | h | Input | 34.34 | 63.97 | 43.64 | 5.70 | - | |
| Average jacking speed (V) | mm/min | Input | 3.33 | 16.67 | 9.30 | 2.88 | - | |
| Soil weakening measure (M) | - | Input | 1 | 2 | 1.03 | 0.19 | - | |
| Prediction object | Jacking force (J) | kN | Output | 380 | 2160 | 1122 | 439.47 | - |
| Heuristic | Application in This Paper | References |
|---|---|---|
| [15] | ||
| [16] | ||
| [17] | ||
| [18] | ||
| [19] | ||
| [20] | ||
| [21,22] | ||
| [23] |
| Number of Hidden Neurons | Training Set | Test Set | Rate for Training Set | Rate for Test Set | Total Rate | ||||
|---|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE | R2 | RMSE | R2 | RMSE | ||
| 7 | 0.8270 | 26.0867 | 0.6222 | 50.3891 | 27 | 21 | 29 | 25 | 102 |
| 6 | 0.8136 | 18.6259 | 0.4891 | 46.1933 | 24 | 26 | 17 | 27 | 94 |
| 12 | 0.8427 | 31.1240 | 0.5721 | 68.2328 | 29 | 17 | 25 | 17 | 88 |
| 28 | 0.7865 | 43.9984 | 0.6263 | 48.8771 | 23 | 9 | 30 | 26 | 88 |
| 14 | 0.7710 | 25.7299 | 0.5343 | 61.0777 | 19 | 23 | 21 | 20 | 83 |
| 2 | 0.6600 | 13.5642 | 0.4851 | 28.1256 | 5 | 29 | 15 | 30 | 79 |
| 11 | 0.7682 | 23.1934 | 0.5739 | 97.8736 | 18 | 24 | 26 | 9 | 77 |
| 17 | 0.8517 | 19.2946 | 0.3817 | 72.0997 | 30 | 25 | 6 | 15 | 76 |
| Number of Generation | Population Size | Training Set | Test Set | Rate for Training Set | Rate for Test Set | Total Rate | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE | R2 | RMSE | R2 | RMSE | |||
| 400 | 150 | 0.8808 | 2.5368 | 0.8519 | 1.4076 | 138 | 111 | 131 | 137 | 517 |
| 500 | 500 | 0.868 | 1.2022 | 0.8461 | 7.9039 | 124 | 129 | 121 | 122 | 496 |
| 350 | 300 | 0.8684 | 0.9074 | 0.8412 | 9.5502 | 125 | 134 | 108 | 121 | 488 |
| 250 | 150 | 0.8757 | 3.061 | 0.8543 | 13.0499 | 134 | 102 | 134 | 110 | 480 |
| 300 | 400 | 0.8679 | 0.9775 | 0.8446 | 18.1216 | 123 | 133 | 118 | 91 | 465 |
| 20 | 500 | 0.8717 | 1.8646 | 0.8534 | 20.395 | 130 | 118 | 133 | 81 | 462 |
| 350 | 100 | 0.8705 | 3.5565 | 0.8476 | 14.3326 | 128 | 96 | 125 | 104 | 453 |
| 30 | 200 | 0.8655 | 0.171 | 0.8383 | 15.8342 | 114 | 138 | 95 | 96 | 443 |
| GA Parameter | Values |
|---|---|
| Genetic operators (possibility) | Crossover (0.9), mutation (0.1) |
| Selection method | Roulette wheel selection |
| Number in population | 150 |
| Number of generations | 400 |
| Method | Model | RMSE | R2 | RE | Rate | Total Rate | ||
|---|---|---|---|---|---|---|---|---|
| RMSE | R2 | RE | ||||||
| ANN | Tr 1 | 6.713 | 0.873 | 0.129 | 4 | 3 | 1 | 8 |
| Tr 2 | 85.924 | 0.613 | 0.099 | 1 | 2 | 2 | 5 | |
| Tr 3 | 22.071 | 0.896 | 0.034 | 2 | 4 | 3 | 9 | |
| Tr 4 | 2.759 | 0.904 | 0.022 | 5 | 5 | 5 | 15 | |
| Tr 5 | 12.966 | 0.904 | 0.027 | 3 | 5 | 4 | 12 | |
| Ts 1 | 66.928 | 0.794 | 0.014 | 2 | 5 | 3 | 10 | |
| Ts 2 | 34.284 | 0.632 | 0.008 | 4 | 2 | 4 | 10 | |
| Ts 3 | 93.595 | 0.278 | 0.034 | 1 | 1 | 2 | 4 | |
| Ts 4 | 37.350 | 0.766 | 0.004 | 3 | 4 | 5 | 12 | |
| Ts 5 | 19.788 | 0.641 | 0.037 | 5 | 3 | 1 | 9 | |
| GA-ANN | Tr 1 | 1.511 | 0.868 | 0.012 | 5 | 4 | 5 | 14 |
| Tr 2 | 53.862 | 0.570 | 0.060 | 1 | 2 | 1 | 4 | |
| Tr 3 | 23.972 | 0.808 | 0.043 | 3 | 3 | 2 | 8 | |
| Tr 4 | 20.341 | 0.894 | 0.027 | 4 | 5 | 4 | 13 | |
| Tr 5 | 47.804 | 0.426 | 0.035 | 2 | 1 | 3 | 6 | |
| Ts 1 | 7.834 | 0.731 | 0.005 | 5 | 4 | 5 | 14 | |
| Ts 2 | 25.691 | 0.506 | 0.063 | 3 | 2 | 1 | 6 | |
| Ts 3 | 8.038 | 0.718 | 0.029 | 4 | 3 | 4 | 11 | |
| Ts 4 | 66.201 | 0.463 | 0.052 | 1 | 1 | 2 | 4 | |
| Ts 5 | 54.433 | 0.746 | 0.039 | 2 | 5 | 3 | 10 | |
| Method | Model | Total Rate |
|---|---|---|
| ANN | 1 | 18 |
| 2 | 15 | |
| 3 | 13 | |
| 4 | 27 | |
| 5 | 21 | |
| GA-ANN | 1 | 28 |
| 2 | 10 | |
| 3 | 19 | |
| 4 | 17 | |
| 5 | 16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, X.-J.; Wang, X.; Wei, G.; Zhu, C.-W.; Shi, Y. Prediction of Jacking Force in Vertical Tunneling Projects Based on Neuro-Genetic Models. J. Mar. Sci. Eng. 2021, 9, 71. https://doi.org/10.3390/jmse9010071
Wei X-J, Wang X, Wei G, Zhu C-W, Shi Y. Prediction of Jacking Force in Vertical Tunneling Projects Based on Neuro-Genetic Models. Journal of Marine Science and Engineering. 2021; 9(1):71. https://doi.org/10.3390/jmse9010071
Chicago/Turabian StyleWei, Xin-Jiang, Xiao Wang, Gang Wei, Cheng-Wei Zhu, and Yu Shi. 2021. "Prediction of Jacking Force in Vertical Tunneling Projects Based on Neuro-Genetic Models" Journal of Marine Science and Engineering 9, no. 1: 71. https://doi.org/10.3390/jmse9010071
APA StyleWei, X. -J., Wang, X., Wei, G., Zhu, C. -W., & Shi, Y. (2021). Prediction of Jacking Force in Vertical Tunneling Projects Based on Neuro-Genetic Models. Journal of Marine Science and Engineering, 9(1), 71. https://doi.org/10.3390/jmse9010071