1. Introduction
Many problems residing at the crossroads between socio-economic, natural, and infrastructure systems are complex and cannot be addressed with simple analytical tools. Computer simulations can be used instead to decide where to intervene in these systems while accounting for their evolution over time (i.e., their dynamics). This cannot be done blindly, and a methodology must be followed, starting with getting acquainted with the context and scale of the landscape in which the problems unfold. This is followed by developing a clear understanding of the issues and their dynamics, being able to simplify these issues, and accessing databases. Once simplified and abstracted, the next stage is to select appropriate modeling tools jointly with realistic input data to simulate and reproduce the dynamics of the issues of interest. Finally, the last step is to carry out various sensitivity analyses, recommend possible intervention scenarios, and decide on the pros and cons of their implementation.
Regardless of how one approaches the modeling of complex problems, it must be remembered that models are based on an interpretation of reality and are not reality itself. They are virtual representations needed to simplify the complexity of the world around us. As remarked by George Box, “essentially all models are wrong, but some are useful […] the approximate nature of the model must always be borne in mind” [
1]. In their interpretation of reality, models must be useful, comprehensive, and sound enough to be able to “reason, explain, design, communicate, act, predict, and explore” [
2].
Since the 1940s, a variety of modeling tools have been proposed in various disciplines of systems and complexity science to address complex problems (see the map by Castellani [
3]). Among these tools, Borshchev and Filippov [
4] consider three types: system dynamics (SD), discrete event modeling (DE), and agent-based (AB) modeling. As shown in
Figure 1, these three categories address different levels of abstraction and details and can be used at different levels of decision making (i.e., strategic, tactical, and operational).
In a nutshell, the SD method is top-down and can be applied to systems with high levels of aggregation (i.e., high abstraction). The method assumes that all processes are continuous and considers multiple feedback mechanisms, delays, and complex non-linear processes described by differential equations. On the other hand, the AB and DE methods use a bottom-up perspective and deal with processes that are discrete and can handle middle to low levels of aggregation (i.e., low abstraction). The difference between these two methods resides in that the AB method deals with active and interactive evolving agents, whereas the DE method deals with passive and non-interactive agents. To the three specific modeling methods, one can add hybrid modeling tools that combine the best of each method [
6,
7].
As noted by Rahmandad and Sterman [
8] regarding the AB and SD methods, one method is not better than the others; they are just different. Selecting the most appropriate method to model the dynamics of a given problem depends on “the purpose of the model and the level of aggregation appropriate for that purpose.” In short, the selected level of aggregation must match the level of details in the available data sources and provide a balance between “simplicity and realistic depiction of the underlying mechanisms” expected to be at play in the problem of interest.
The purpose of this paper is to explore the applicability of the AB and SD methods to model a specific case study of managing water field services in a remote region (Afar regional state) of Ethiopia. The dynamic considered herein was adapted from that used in the Field Service AB model, which can be found in the Big Book of Simulation Modeling by Borshchev (pp. 142–194 [
6]). The case study considered here involves multiple water borehole sites distributed over a given geographic area. The borehole units at each site serve the water needs of people in that area. The location of each site is defined by its latitude and longitude GIS coordinates. Each site involves a variety of equipment used for pumping (e.g., water pumps), storage (e.g., tanks), filtration (e.g., water filtration units), distribution (e.g., pipes, canals), and wastewater collection and treatment facilities, etc. When each borehole unit operates as planned, some water-related revenue stream is generated that benefits the population who depend on the borehole sites for livelihood and socio-economic development.
All borehole sites are managed by a single water utility that has adopted specific operation and maintenance rules and policies. A maintenance policy includes replacing site equipment after several cycles of maintenance. A policy is also in place to take care of any site equipment that needs to be repaired or replaced, assuming a specific rate of failure, which is expected to increase with equipment aging.
The water utility employs several motorized service crews (SC) that are initially all stationed at a single central location (service center) defined by its latitude and longitude GIS coordinates. When the utility receives a request of service (repair or replacement) from a borehole site, one of the service crews takes the request, drives to the site, and performs the necessary work of equipment repair, replacement, and/or maintenance. After completion of the work at each borehole site, the service crew takes another request from a request queue and drives to the next borehole site. If the queue is empty, it returns to the service center. All service crews are assumed to be able to communicate with each other and with a central dispatcher located at the service center. Furthermore, each service crew has fixed daily operating costs associated with its services. Each operation, such as repair, replacement, or maintenance, has an additional one-time charge.
In this paper, the AB and SD methods are used to model the dynamics outlined above. Both methods account, albeit in different ways, for the interaction of two groups of agents: the borehole sites and service crews. More specifically, the goal of this paper is to explore, for two different levels of abstraction, the capacity of each method to analyze how the management of the system of borehole sites and decision making over time are affected by (i) the location of the service center; (ii) the number of water utility service crews and their speed of transport, and (iii) the repair, replacement, and maintenance policy of the water utility. Two simulation modeling software tools are used in this paper: the agent-based modeling tool of AnyLogic (Personal Learning Edition, version 8.5.2) and the STELLA Architect system dynamics modeling tool by isee systems, Inc. (version 1.9.4.)
3. System Dynamics Simulation
The system dynamics method is a relatively recent branch of systems science that originated with the work of Dr. Jay Forrester at the Massachusetts Institute of Technology in the 1950s and 1960s [
15,
16,
17]. A review of the method and its multiple applications can be found in some landmark books by Richmond [
18], Sterman [
19], and Ford [
20], among many others. The unique characteristics of the SD method that warrant its use in modeling the dynamics of complex systems include being able to (i) study how systems continuously change over time due to possible changes in and relationships among components and changes in the overall direction of systems allowing for both qualitative and quantitative modeling; (ii) account for systems non-linearities, feedback mechanisms, and delays; (iii) illustrate that as the structure of a system changes, so does its behavior and vice-versa. A limiting aspect of SD is that it cannot capture the details of the individual components that form the system.
3.1. SD Model
Compared to the AB method, system dynamics (SD) considers all borehole equipment sites and service crews as two aggregated and indistinguishable homogeneous sets of agents that are evolving continuously. As a result, this abstraction level makes the modeling of how the agents in
Figure 3 and
Figure 4 interact and change more challenging. For instance, it is not possible to capture the individual mobility of the service crews directly as the borehole equipment sites transition from one state to the other. Only the average behavior of the two sets of agents can be estimated. One way to overcome some of these limitations is to carry out sensitivity and stochastic analyses on key parameters in the SD models, as shown below.
Having this in mind,
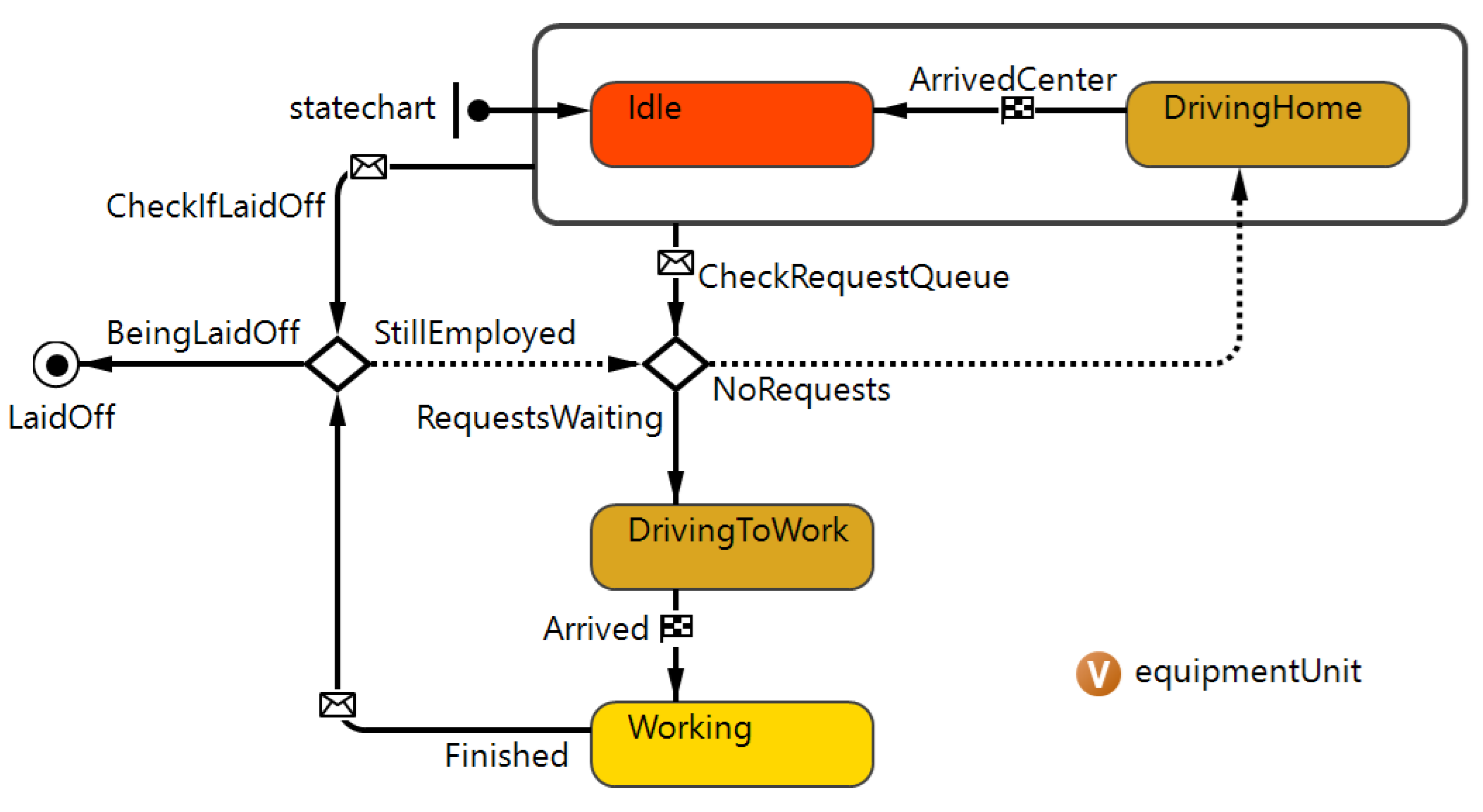
Figure 8 shows a possible stock-and-flow system dynamics simulation model that captures as best as possible the dynamic between the different states in the equipment statechart of
Figure 2. The model was developed by the author using the STELLA Architect software (version 1.9.4). A user interface of the system dynamics model is available on the web (
https://exchange.iseesystems.com/public/bernardamadei/bhserviceethiopia) and can be used to explore different scenarios. A special effort was made to integrate the same data (
Table 1) used in the AB model in the SD simulation.
In the SD model of
Figure 8, several stocks are used to represent the state of the equipment at the borehole sites. Different states (e.g., working, repaired, failed, replaced, and maintained) and transitional states (e.g., failed, needing replacement, and needing maintenance) are considered. Three decision time converters, expressed in hours, are used to capture the time necessary for the borehole units to return from a repair, maintenance, or replacement state to a working state. The three decision times are selected at random, assuming a triangular distribution ranging between 12 and 48 h with a mode of 24 h.
The equipment failure rate is represented by a time function specified by the user. Since it was not possible to reproduce with SD the failure rate algorithm used in the AB model, an S-shaped function was selected to match as best as possible the variation of the failure rate considered in that model. The failure rate varies between a minimum value (0.03 in this example) and a maximum value specified by the user (0.11 in this example). The slope of the S-shaped function (0.01 in this example) dictates how quickly the failure rate increases with time. If necessary, the maximum value and slope can themselves be made dependent on specific maintenance rules and policy selected by the utility company.
After failure, some borehole sites have their equipment repaired, while others require equipment replacement. The basic rate of equipment replacement after failure is equal to 10% per day (see
Table 1). Once the equipment is replaced after a specific time, the borehole units are returned to a working state. If not replaced, the equipment is repaired. It may happen that during repair, the equipment is due for maintenance. If not, the borehole units are returned to a working state. If yes, maintenance of the equipment is performed, and the borehole units are returned to the working state. Finally, borehole units that follow a regular maintenance policy are checked whether they have exceeded a specified number (four) of cycles of maintenance (90 days each). If yes, their equipment is automatically replaced. If not, the borehole units are returned to a working condition.
The daily number of service crews necessary to provide the replacement, repair, and maintenance services is calculated as the ratio between the daily number of boreholes repaired, replaced, or maintained calculated by the model and the number of borehole units assumed to be serviced by each service crew. The latter is selected at random, assuming a triangular distribution ranging between three and seven with a mode/mean value of five borehole units served by each service crew.
It should be noted that the travel time of the service crews to each borehole site is not accounted for explicitly in the SD model, like in the AB model. As an alternative, the travel time is assumed to be random, assuming a triangular distribution ranging between 15 and 45 h with a mode/mean value of 30 h. This extra time is added to the basic equipment repair time (5 h), maintenance time (3 h), and replacement time (12 h) of
Table 1. The selected range of travel time translates into a travel distance ranging from 150 to 450 km at a speed of 10 km/hour (see
Table 1), which corresponds somewhat to the range of travel distances expected from the service center to the northern limit (Adigrat) and southern limit (Addis Ababa) of
Figure 2. Recall that the distance between these two limits is about 900 km and that the service center is located roughly halfway (about 450 km) in between.
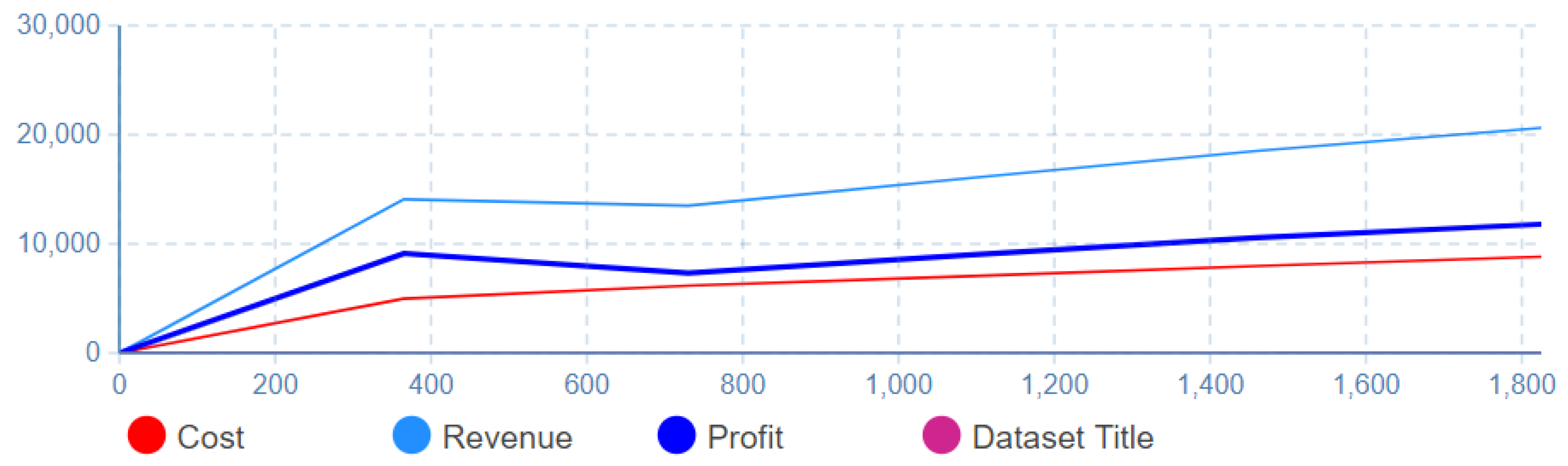
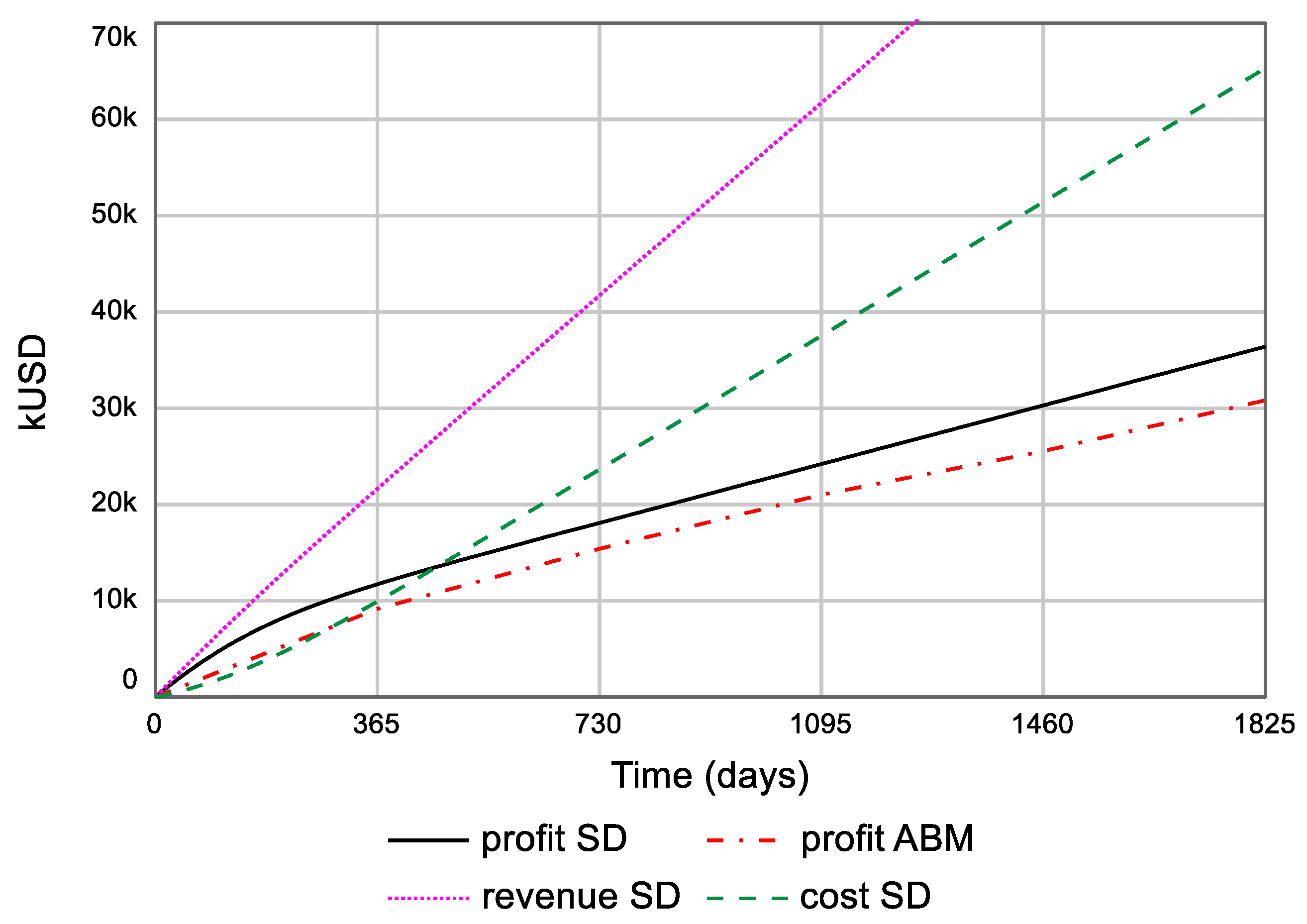
As an example,
Figure 9 shows the variation of the cumulative revenue, cost, and profit over five years for the input data mentioned above. The cumulative profit predicted by the AB method (listed in
Table 2) is also shown for comparison.
3.2. Sensitivity Analysis
The SD model presented above can be used to carry out various sensitivity analyses. The baseline values of the parameters involved in the analyses presented below were selected as follows: (i) time between maintenance events = 90 h; (ii) extra times for service (repair, replacement, maintenance) = 30 h; (iii) decision times from service (repair, replacement, maintenance) to working = 48 h; and (iv) number of borehole units serviced (repair, replacement, maintenance) per service crew = 5. The sensitivity analyses consisted of varying each one of these parameters incrementally over specific ranges of values.
3.2.1. Influence of Time between Maintenance Events
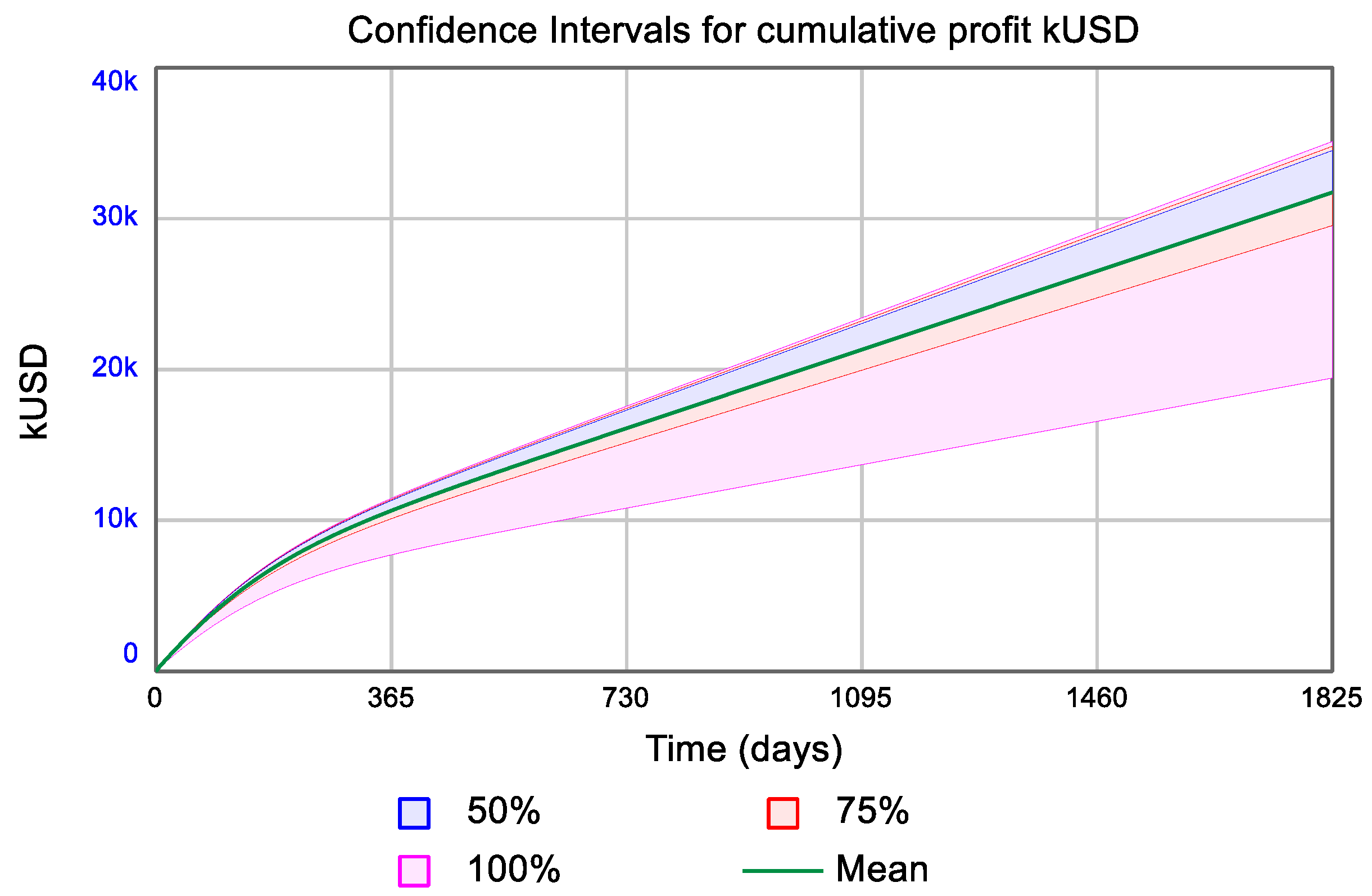
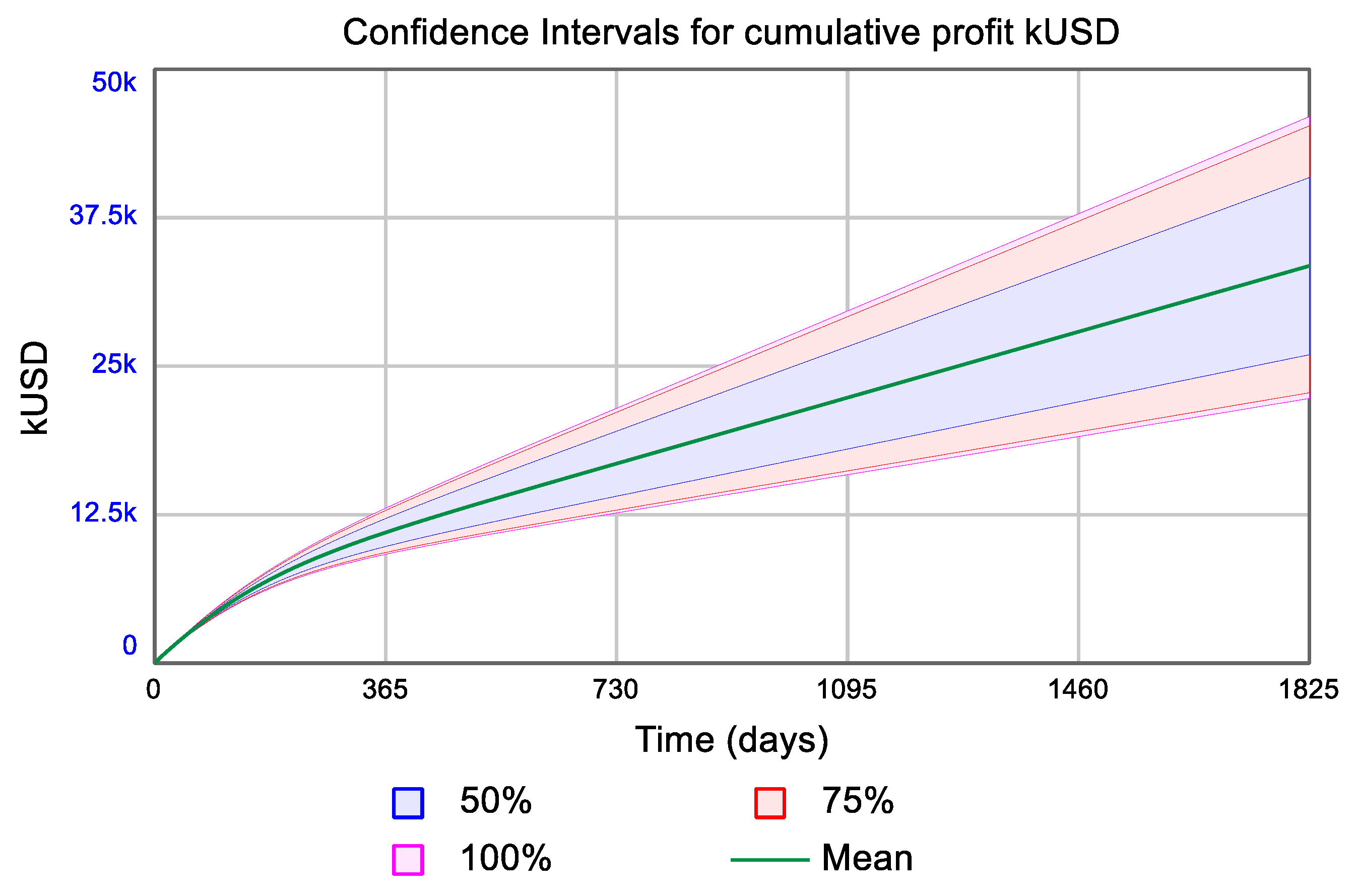
As an example,
Figure 10 shows the influence of the time between two consecutive maintenance events on the performance of the system. That time is assumed to vary between 20 and 200 days, all other parameters being the same.
Figure 10 shows a significant influence after 365 days for a 100% confidence interval. For smaller levels of confidence, the impact is limited.
3.2.2. Influence of Extra Service Time
A second sensitivity analysis was carried out to explore the effect of the extra times for repair, replacement, and maintenance on the cumulative profit. All three times were assumed to vary between 15 and 45 h, all other parameters being the same. The sensitivity of the profit to the extra times after 365 days is clearly emphasized in
Figure 11.
3.2.3. Influence of Decision Time between Service and Working
A third sensitivity analysis was carried out to explore the effect of the three decision times in
Figure 8 (repaired to working, replaced to working, and maintained to working) on the profit. All three decision times were assumed to vary incrementally between 24 and 96 h each, all other parameters being the same. As shown in
Figure 12, the decision time has a limited influence on the cumulative profit.
3.2.4. Influence of Number of Borehole Units per Service Crew
The last sensitivity analysis explores the influence that the number of boreholes serviced per crew has on the cumulative profit. That number is assumed to vary incrementally between three and seven for repair, replacement, and maintenance; all other parameters being the same. The results of the analysis shown in
Figure 13 show that the number of boreholes serviced per crew has a limited effect on the profit for the range considered herein.
3.3. Optimization Analysis
The STELLA Architect software can also be used to carry out optimization work using different algorithms such as the Powell, grid, and differential evolution methods [
21]. As an illustrative example, the differential evolution algorithm was used to determine the values of decision times and extra times that lead to the maximum cumulative profit at the end of five years (1825 days). All other model parameters were assumed to be the same. An optimal profit of
$50,408 (k
$) was found for the following input values:
Decision times between repair, maintenance, or replacement and working: 24 h
Extra times for repair, replacement, and maintenance: 15 h
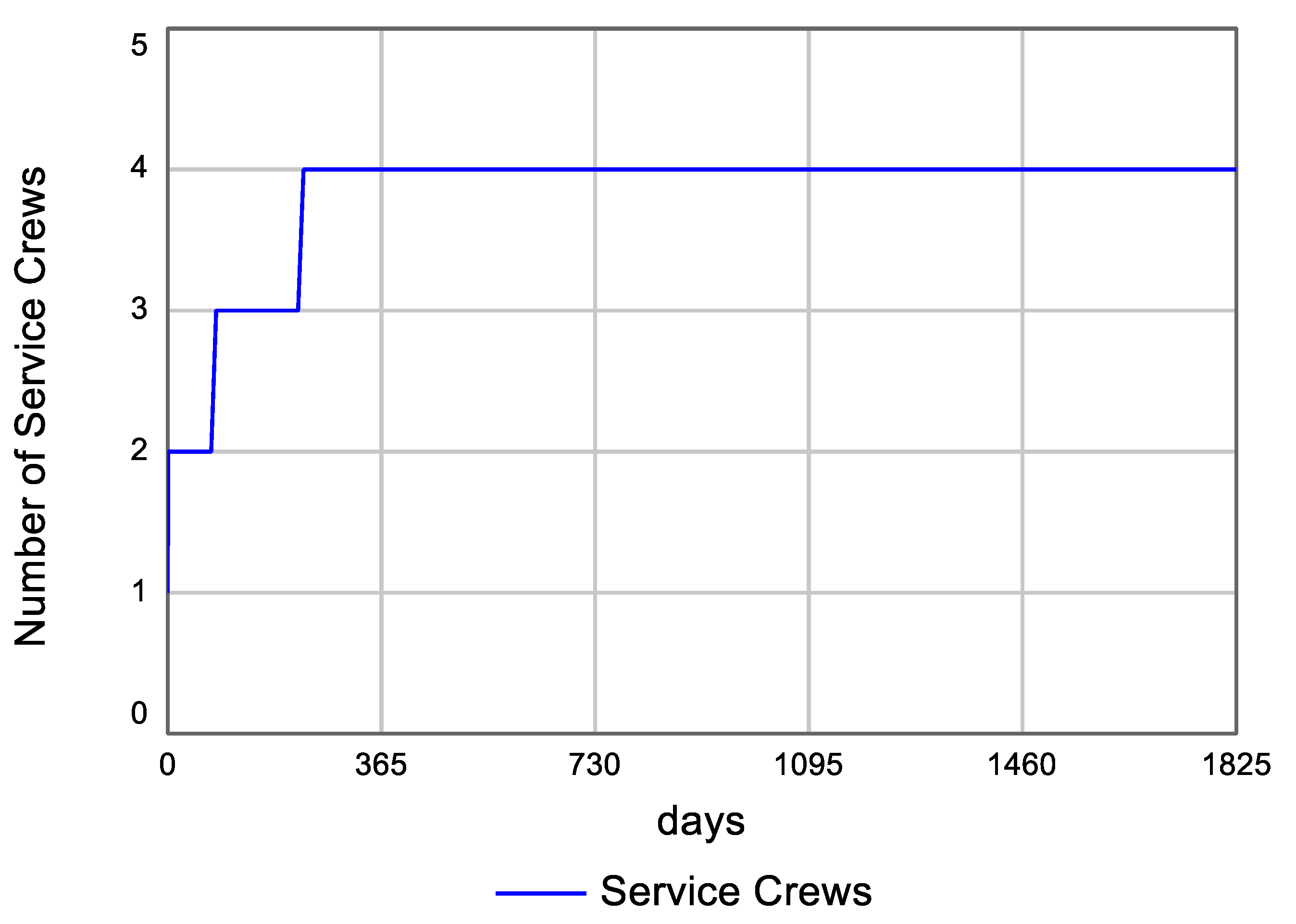
For these conditions, the management of the borehole sites can be accomplished by changing the number of service crews providing the services of repair, replacement, and maintenance. In this example, each service crew is assumed to serve five borehole units per day.
Figure 14 shows the variation of the total number of service crews with time.
4. Conclusions
This paper looked at the application of two numerical methods to model the dynamic between two groups of interacting agents involved in the management of water field services in a remote region of Ethiopia. Both methods use different formulations and levels of abstraction to model that interaction.
The disaggregation inherent to the AB method allows for a detailed and discrete analysis of the impact individual agents and groups of agents have on the performance of complex systems. This unique characteristic of the AB method allows for capturing emergence, a phenomenon that is unique to complex systems and which cannot be obtained using linear equations, or the SD and DE methods. In the case study considered herein, the interaction of the borehole site and service crew agents creates an emerging behavior that cannot be inferred from the sum of individual interactions alone.
The SD method assumes a high level of abstraction and homogeneity when considering the interaction between the two groups of agents. The method requires fewer details than the AB method and uses an averaging process to predict the continuous behavior of the two groups of agents. Various parametric studies can still be carried out to analyze, for instance, the impact of multiple factors on the cumulative profit. However, the influence of the location of the service center on the profit cannot be analyzed.
The two AB and SD modeling software tools used in this paper are powerful enough to handle multiple complex processes and interactions. Despite their differences and for the case study considered in this paper, both AB and SD modeling tools give results that are realistic, good enough, and consistent in the ballpark with each other. Of course, many assumptions would have to be made to match the predictions of both methods even further.
As emphasized in the literature comparing AB and SD methods, one approach is not better than the other [
11,
22]. They are different in the way they interpret reality and can be used for various aspects of decision making in addition to matching the level of disaggregation in the situation of interest. A metaphor used by Schieritz and Milling [
7] to describe the main difference between the two methods is that the SD method models the trees, and the AB method models the forest. The decision to use one method rather than the other should be based on whether decision-makers interested in exploratory policies are involved at the strategic level, where SD is more appropriate, or the operational level where AB is more relevant. In some situations, the value proposition of both approaches (i.e., modeling the forest and the trees) should be considered when considering how strategy translates into operational work.
Despite being arbitrary selected, the numerical example used in this paper shows that the different complex steps involved in the management of water field services can be captured explicitly using AB and SD models. As emphasized in
Section 1, in their interpretation of reality, the models can be useful to “reason, explain, design, communicate, act, predict, and explore” [
2]. It must be kept in mind that models are as good as the data available from field studies.
Finally, it should be noted that the AB and SD models presented above do not specify the sequences of operations and processes taking place at each borehole site from the arrival of a service crew to its departure once repair, replacement, and maintenance are completed. The operations may include, for instance, crew assessment, sequential repairing, and replacement of some of the borehole equipment, finding missing parts, etc. This additional complexity would require another level of disaggregation, which, if needed in operation and maintenance, could be accounted for by combining either method with the discrete-event (DE) method mentioned earlier in this paper.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}