Feeling Uncertain—Effects of a Vibrotactile Belt that Communicates Vehicle Sensor Uncertainty

 , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Related Work
1.2. Current Study
2. Materials and Methods
2.1. Participants
2.2. Experimental Setup
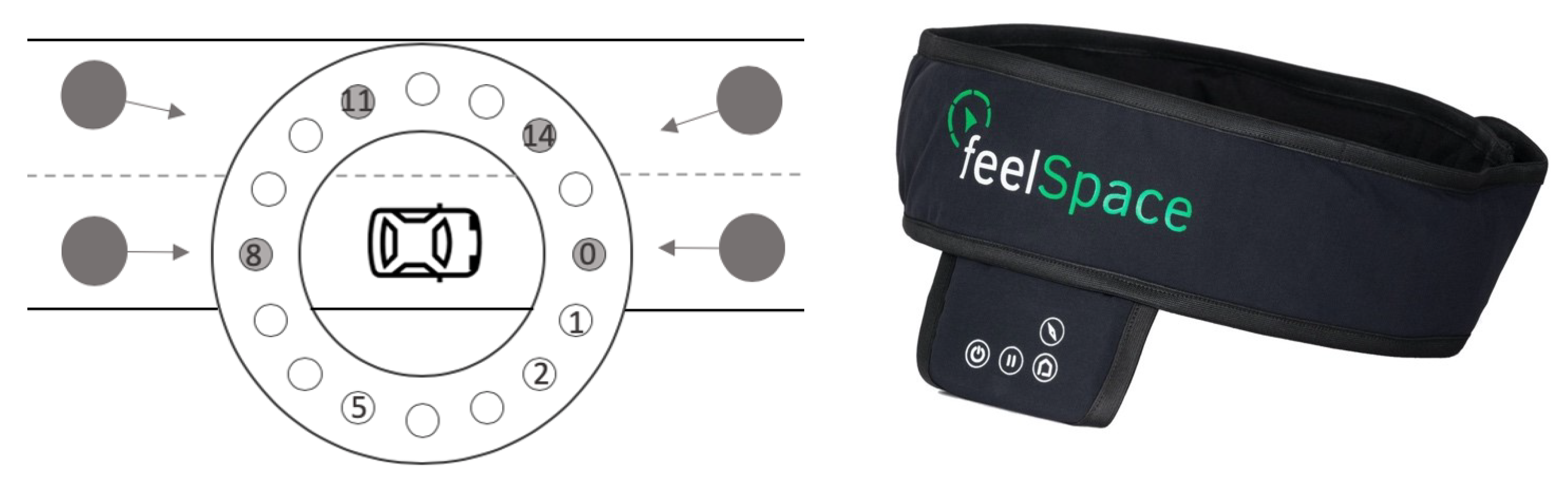
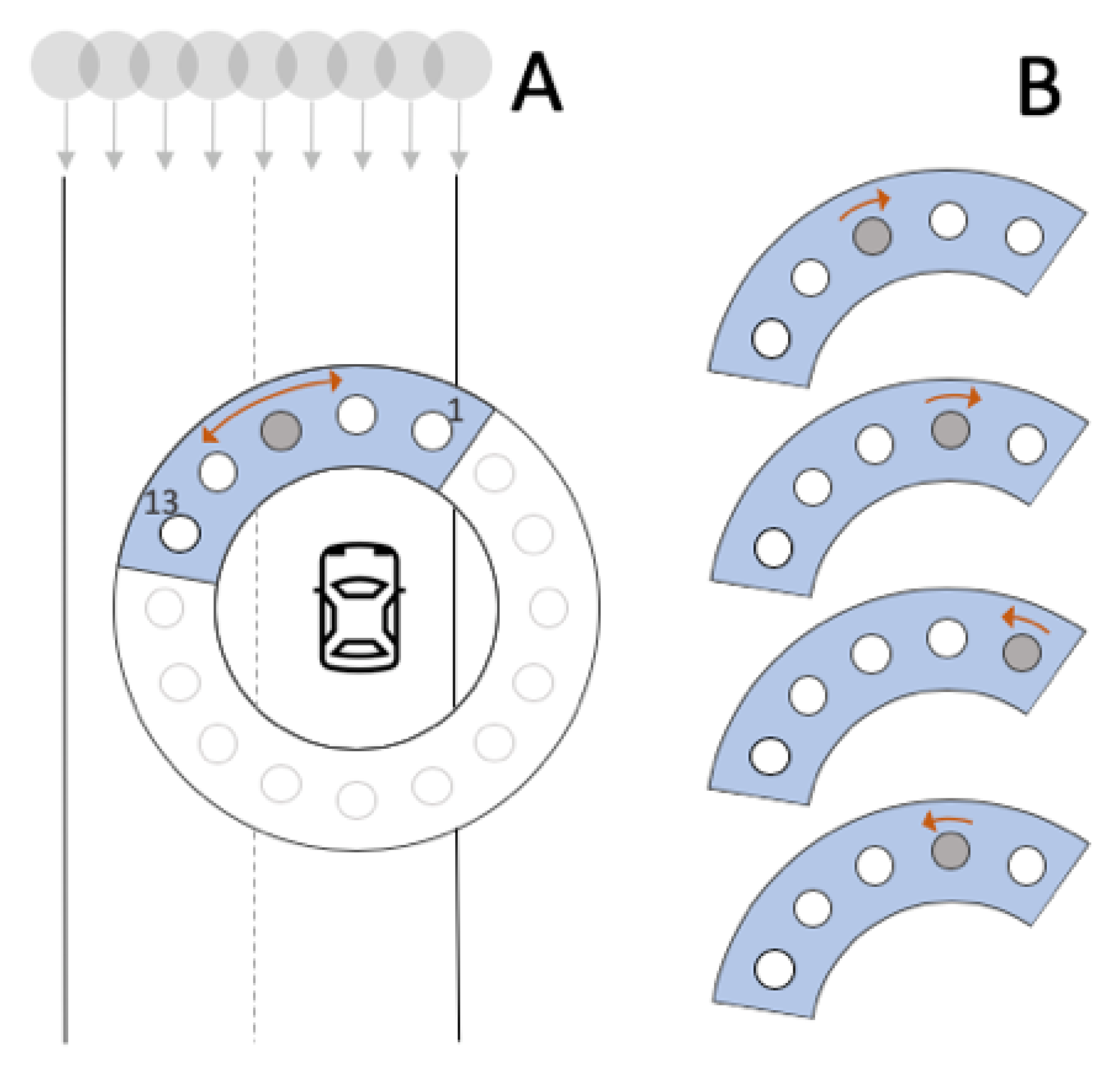
2.3. Stimuli
2.3.1. Uncertainty Communication
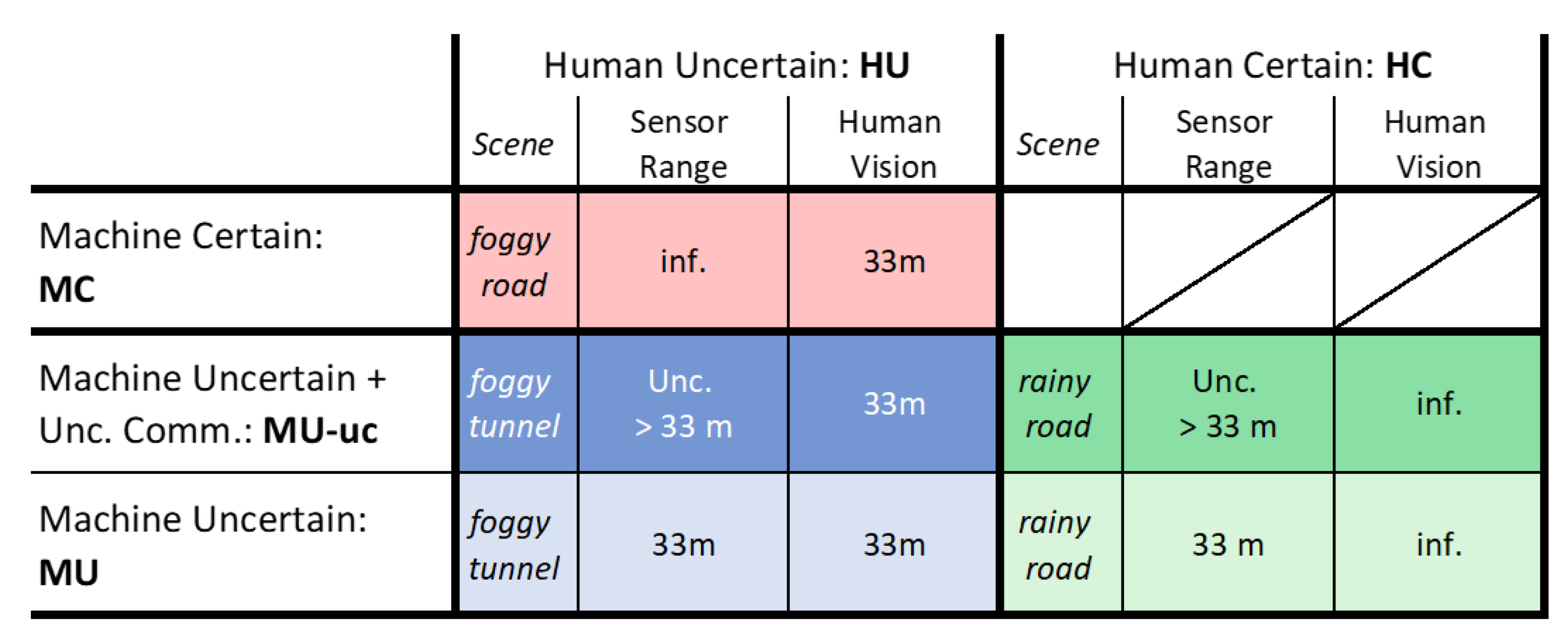
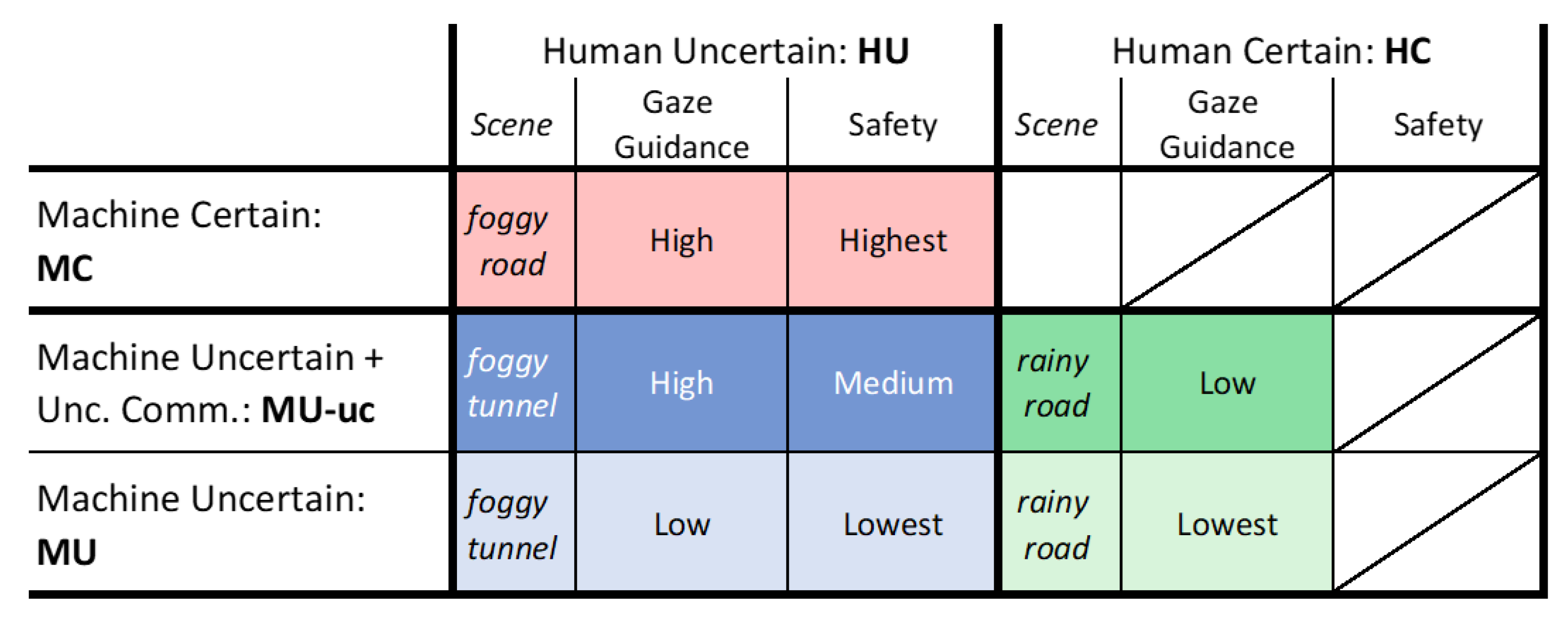
2.4. Experimental Design
Independent Variables
2.5. Procedure
2.5.1. Familiarization—System Exploration Scenario
2.5.2. Experimental Block-Foggy Road: Machine Certain, Human Uncertain (MC-HU)
2.5.3. Experimental Block-Foggy Tunnel: Machine and Human Uncertain (MU-HU)
2.5.4. Experimental Block-Rain: Machine Uncertain, Human Certain (MU-HC)
2.5.5. Dependent Measures
2.5.5.1. Task Load, Usefulness, Satisfaction
2.5.5.2. Understanding and Experience
2.5.5.3. Gaze Distributions
2.5.5.4. Trial Safety
2.5.5.5. Trial Definition
2.6. Analysis
2.6.1. Custom Questionnaire Data—H1 (Understanding)
2.6.2. Acceptance and Workload—H2 (Subjective Benefit) and H3 (Disturbance)
2.6.3. Gaze Distribution and Safety—H4 (Safety)
3. Results
3.1. Subjective Reports
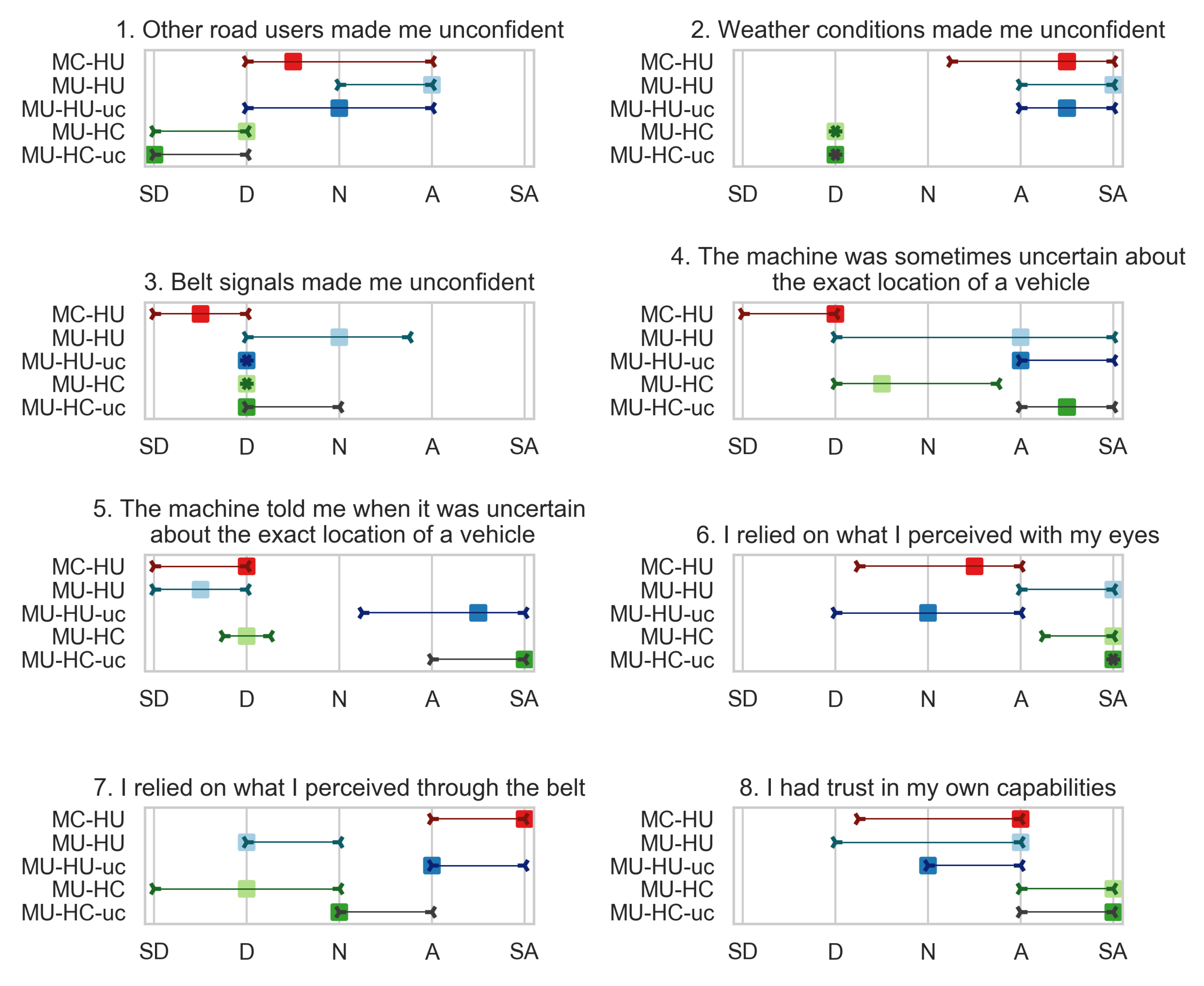
3.1.1. Custom Questionnaire—H1 (Understanding)
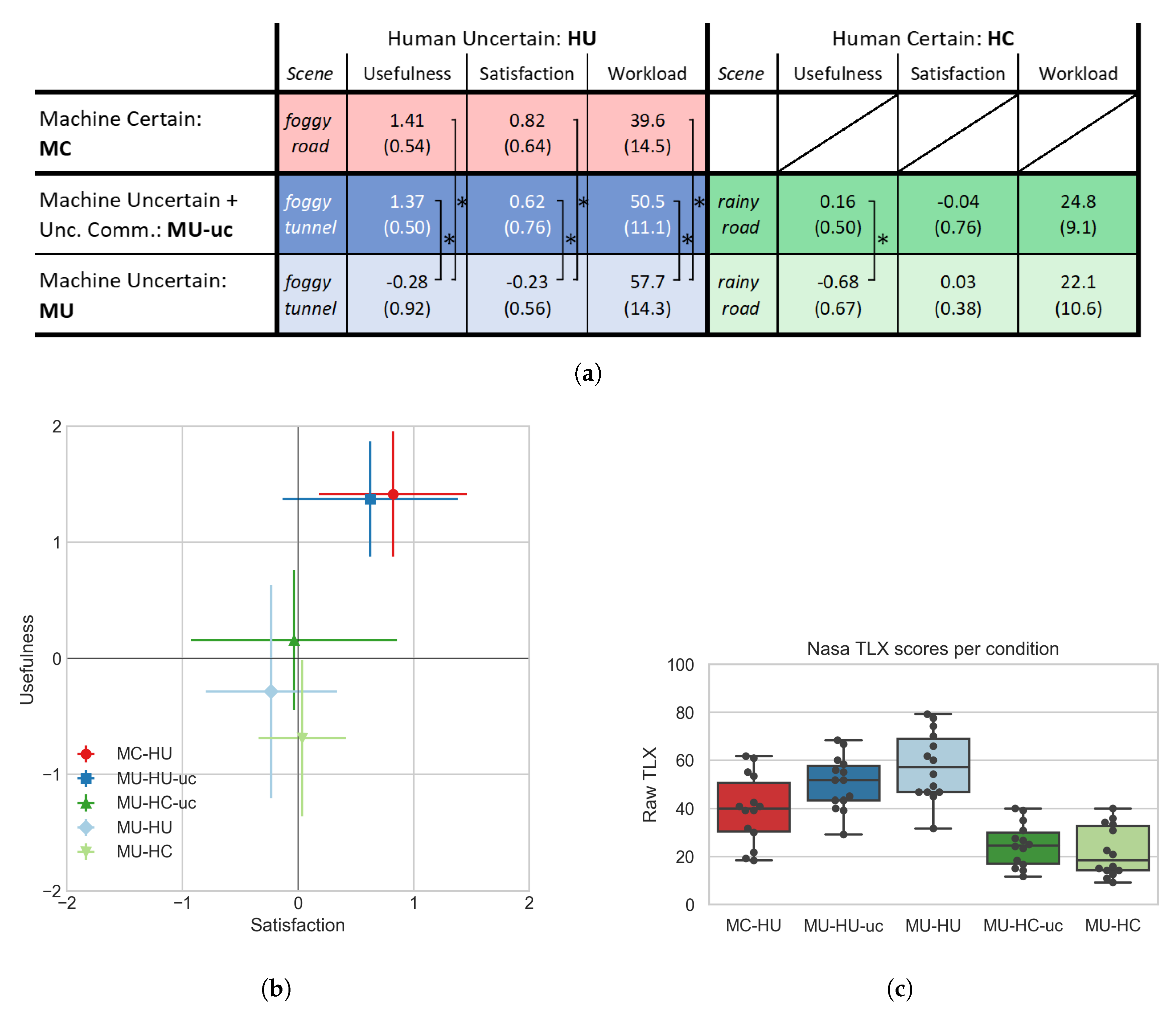
3.1.2. Usefulness and Satisfaction—H2 (Subjective Benefit) and H3 (Disturbance)
3.1.3. Workload—H2 (Subjective Benefit) and H3 (Disturbance)
3.2. Gaze Distribution—H2 (Subjective Benefit) and H4 (Safety)
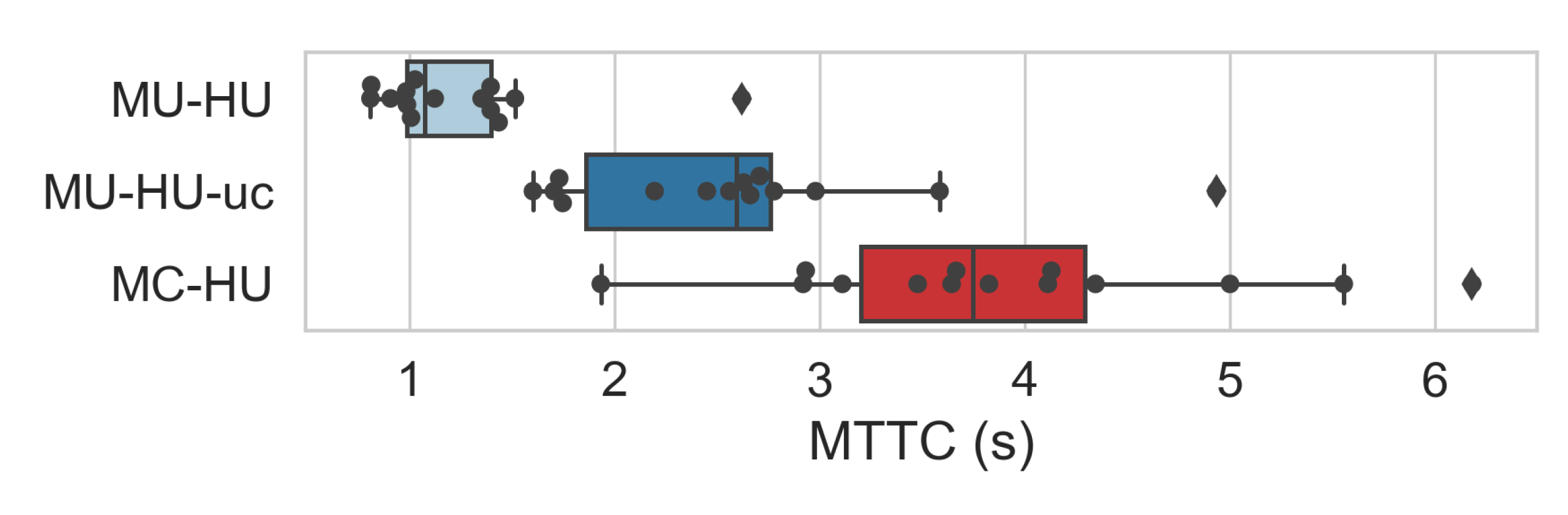
3.3. Trial Safety—H4 (Safety)
4. Discussion
4.1. Signal Understanding and Experiment Validation
4.2. Uncertainty Signaling in Human Uncertain Conditions
4.3. Uncertainty Signaling in Human Certain Conditions
4.4. Limitations
4.5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hasirlioglu, S.; Kamann, A.; Doric, I.; Brandmeier, T. Test methodology for rain influence on automotive surround sensors. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 2242–2247. [Google Scholar] [CrossRef]
- Audi. A8 Owner’s Manual; Audi AG: Ingolstadt, Germany, 2018. [Google Scholar]
- Lee, J.D.; See, K.A. Trust in Automation: Designing for Appropriate Reliance. Hum. Factors J. Hum. Factors Ergon. Soc. 2004, 46, 50–80. [Google Scholar] [CrossRef] [PubMed]
- Flemisch, F.O.; Bengler, K.; Bubb, H.; Winner, H.; Bruder, R. Towards cooperative guidance and control of highly automated vehicles: H-Mode and Conduct-by-Wire. Ergonomics 2014, 57, 343–360. [Google Scholar] [CrossRef] [PubMed]
- Hoc, J.M. Towards a cognitive approach to human-machine cooperation in dynamic situations. Int. J. Hum. Comput. Stud. 2001, 54, 509–540. [Google Scholar] [CrossRef] [Green Version]
- Klein, G.; Woods, D.; Bradshaw, J.; Hoffman, R.; Feltovich, P. Ten Challenges for Making Automation a “Team Player” in Joint Human-Agent Activity. IEEE Intell. Syst. 2004, 19, 91–95. [Google Scholar] [CrossRef] [Green Version]
- Krüger, M.; Wiebel, C.B.; Wersing, H. From Tools Towards Cooperative Assistants. In Proceedings of the 5th International Conference on Human Agent Interaction (HAI ’17), Bielefeld, Germany, 17–20 October 2017; ACM Press: New York, NY, USA, 2017; pp. 287–294. [Google Scholar] [CrossRef]
- Sendhoff, B.; Wersing, H. Cooperative Intelligence—A Humane Perspective. In Proceedings of the 1st IEEE International Conference on Human-Machine Systems (ICHMS 2020), Rome, Italy, 7–9 September 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Caird, J.K.; Chisholm, S.; Lockhart, J. Do in-vehicle advanced signs enhance older and younger drivers’ intersection performance? Driving simulation and eye movement results. Int. J. Hum.-Comput. Stud. 2008, 66, 132–144. [Google Scholar] [CrossRef]
- Naujoks, F.; Neukum, A. Timing of in-vehicle advisory warnings based on cooperative perception. In Proceedings of the Human Factors and Ergonomics Society Europe Chapter Annual Meeting, Torino, Italy, 16–18 October 2013. [Google Scholar]
- Ali, Y.; Zheng, Z.; Haque, M.M. Connectivity’s impact on mandatory lane-changing behaviour: Evidences from a driving simulator study. Transp. Res. Part Emerg. Technol. 2018, 93, 292–309. [Google Scholar] [CrossRef]
- Naujoks, F.; Totzke, I. Behavioral adaptation caused by predictive warning systems—The case of congestion tail warnings. Transp. Res. Part Traffic Psychol. Behav. 2014, 26, 49–61. [Google Scholar] [CrossRef]
- Beller, J.; Heesen, M.; Vollrath, M. Improving the Driver-Automation Interaction. Hum. Factors J. Hum. Factors Ergon. Soc. 2013, 55, 1130–1141. [Google Scholar] [CrossRef]
- Finger, R.; Bisantz, A.M. Utilizing graphical formats to convey uncertainty in a decision-making task. Theor. Issues Ergon. Sci. 2002, 3, 1–25. [Google Scholar] [CrossRef]
- Helldin, T.; Falkman, G.; Riveiro, M.; Davidsson, S. Presenting system uncertainty in automotive UIs for supporting trust calibration in autonomous driving. In Proceedings of the 5th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’13), Eindhoven, The Netherlands, 27–30 October 2013; ACM Press: New York, NY, USA, 2013; pp. 210–217. [Google Scholar] [CrossRef]
- Kunze, A.; Summerskill, S.J.; Marshall, R.; Filtness, A.J. Automation transparency: Implications of uncertainty communication for human-automation interaction and interfaces. Ergonomics 2019, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Noah, B.E.; Gable, T.M.; Chen, S.Y.; Singh, S.; Walker, B.N. Development and Preliminary Evaluation of Reliability Displays for Automated Lane Keeping. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’17), Oldenburg, Germany, 24–27 September 2017; ACM Press: New York, NY, USA, 2017; pp. 202–208. [Google Scholar] [CrossRef]
- Faltaous, S.; Baumann, M.; Schneegass, S.; Chuang, L.L. Design Guidelines for Reliability Communication in Autonomous Vehicles. In Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Toronto, ON, Canada, 23–25 September 2018; pp. 258–267. [Google Scholar]
- SAE International On-Road Automated Driving Committee. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; Technical report SAE J3016; SAE International: Warrendale, PA, USA, 2016. [Google Scholar]
- Kunze, A.; Summerskill, S.J.; Marshall, R.; Filtness, A.J. Conveying Uncertainties Using Peripheral Awareness Displays in the Context of Automated Driving. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Utrecht, The Netherlands, 22–25 September 2019; pp. 329–341. [Google Scholar]
- Cohen-Lazry, G.; Borowsky, A.; Oron-Gilad, T. The effects of continuous driving-related feedback on drivers’ response to automation failures. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Nantes, France, 20 October 2017; SAGE Publications Sage CA: Los Angeles, CA, USA, 2017; Volume 61, pp. 1980–1984. [Google Scholar]
- Kunze, A.; Summerskill, S.J.; Marshall, R.; Filtness, A.J. Preliminary Evaluation of Variables for Communicating Uncertainties Using a Haptic Seat. In Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18), Toronto, ON, Canada, 23–25 September 2018; ACM Press: New York, NY, USA, 2018; pp. 154–158. [Google Scholar]
- Wintersberger, P.; Dmitrenko, D.; Schartmüller, C.; Frison, A.K.; Maggioni, E.; Obrist, M.; Riener, A. S(C)ENTINEL. In Proceedings of the 24th International Conference on Intelligent User Interfaces (IUI ’19), Marina del Ray, CA, USA, 19–22 March 2019; ACM Press: New York, NY, USA, 2019; pp. 538–546. [Google Scholar] [CrossRef] [Green Version]
- Van Erp, J.B.F. Guidelines for the use of vibro-tactile displays in human computer interaction. In Proceedings of the Eurohaptics, Edinburgh, UK, 8–10 July 2002; Volume 2002, pp. 18–22. [Google Scholar]
- Petermeijer, S.M.; Cieler, S.; De Winter, J.C.F. Comparing spatially static and dynamic vibrotactile take-over requests in the driver seat. Accid. Anal. Prev. 2017, 99, 218–227. [Google Scholar] [CrossRef] [PubMed]
- Ho, C.; Tan, H.Z.; Spence, C. Using spatial vibrotactile cues to direct visual attention in driving scenes. Transp. Res. Part Traffic Psychol. Behav. 2005, 8, 397–412. [Google Scholar] [CrossRef]
- Spence, C.; Ho, C. Tactile and Multisensory Spatial Warning Signals for Drivers. IEEE Trans. Haptics 2008, 1, 121–129. [Google Scholar] [CrossRef] [PubMed]
- Fitch, G.M.; Hankey, J.M.; Kleiner, B.M.; Dingus, T.A. Driver comprehension of multiple haptic seat alerts intended for use in an integrated collision avoidance system. Transp. Res. Part Traffic Psychol. Behav. 2011, 14, 278–290. [Google Scholar] [CrossRef]
- Meng, F.; Spence, C. Tactile warning signals for in-vehicle systems. Accid. Anal. Prev. 2015, 75, 333–346. [Google Scholar] [CrossRef] [PubMed]
- Petermeijer, S.M.; de Winter, J.C.; Bengler, K.J. Vibrotactile displays: A survey with a view on highly automated driving. IEEE Trans. Intell. Transp. Syst. 2016, 17, 897–907. [Google Scholar] [CrossRef] [Green Version]
- Nagel, S.K.; Carl, C.; Kringe, T.; Märtin, R.; König, P. Beyond sensory substitution—Learning the sixth sense. J. Neural Eng. 2005, 2, R13. [Google Scholar] [CrossRef] [Green Version]
- Van Erp, J.B.F.; Veen, H.A.H.C.V.; Jansen, C.; Dobbins, T. Waypoint Navigation with a Vibrotactile Waist Belt. ACM Trans. Appl. Percept. 2005, 2, 106–117. [Google Scholar] [CrossRef]
- Smets, N.J.; te Brake, G.M.; Neerincx, M.A.; Lindenberg, J. Effects of mobile map orientation and tactile feedback on navigation speed and situation awareness. In Proceedings of the 10th International Conference on Human Computer Interaction with Mobile Devices and Services, Amsterdam, The Netherlands, 2–5 September 2008; ACM: New York, NY, USA, 2008; pp. 73–80. [Google Scholar]
- Srikulwong, M.; O’Neill, E. A comparative study of tactile representation techniques for landmarks on a wearable device. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Vancouver, BC, Canada, 7–12 May 2011; ACM: New York, NY, USA, 2011. [Google Scholar]
- Zelek, J.; Hobein, M. Wearable Tactile Navigation System. US20130218456, 22 August 2013. [Google Scholar]
- Steltenpohl, H.; Bouwer, A. Vibrobelt: Tactile Navigation Support for Cyclists. In Proceedings of the 2013 International Conference on Intelligent User Interfaces, Santa Monica, CA, USA, 19–22 March 2013; ACM: New York, NY, USA, 2013; pp. 417–426. [Google Scholar]
- Prasad, M.; Taele, P.; Goldberg, D.; Hammond, T.A. Haptimoto: Turn-by-turn haptic route guidance interface for motorcyclists. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Toronto, ON, Canada, 26 April–1 May 2014; ACM: New York, NY, USA, 2014. [Google Scholar]
- Schirmer, M.; Hartmann, J.; Bertel, S.; Echtler, F. Shoe me the way: A shoe-based tactile interface for eyes-free urban navigation. In Proceedings of the 17th International Conference on Human-Computer Interaction with Mobile Devices and Services, Copenhagen, Denmark, 24–27 August 2015; ACM: New York, NY, USA, 2015; pp. 327–336. [Google Scholar]
- Dobbelstein, D.; Henzler, P.; Rukzio, E. Unconstrained pedestrian navigation based on vibro-tactile feedback around the wristband of a smartwatch. In Proceedings of the 2016 CHI Conference Extended Abstracts on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; ACM: New York, NY, USA, 2016; pp. 2439–2445. [Google Scholar]
- Cassinelli, A.; Reynolds, C.; Ishikawa, M. Augmenting spatial awareness with Haptic Radar. In Proceedings of the 2006 10th IEEE International Symposium on Wearable Computers, Montreux, Switzerland, 11–14 October 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 61–64. [Google Scholar] [CrossRef]
- Cardin, S.; Thalmann, D.; Vexo, F. A wearable system for mobility improvement of visually impaired people. Vis. Comput. 2007, 23, 109–118. [Google Scholar] [CrossRef] [Green Version]
- Franz, M.; Zeidler, A.; dos Santos Rocha, M.; Klein, C. Vibro-Tactile Space-Awareness. In Proceedings of the Tenth International Conference on Ubiquitous Computing, Seoul, Korea, 21–24 September 2008; pp. 117–120. [Google Scholar]
- Riener, A.; Ferscha, A. Raising awareness about space via vibro-tactile notifications. In Proceedings of the European Conference on Smart Sensing and Context, Zurich, Switzerland, 29–31 October 2008; Springer: Berlin, Germany, 2008; pp. 235–245. [Google Scholar]
- Morrell, J.; Wasilewski, K. Design and evaluation of a vibrotactile seat to improve spatial awareness while driving. In Proceedings of the 2010 IEEE Haptics Symposium, Waltham, MA, USA, 25–26 March 2010; pp. 281–288. [Google Scholar] [CrossRef]
- de Barros, P.G.; Lindeman, R.W. Performance effects of multi-sensory displays in virtual teleoperation environments. In Proceedings of the 1st Symposium on Spatial User Interaction (SUI ’13), Los Angeles, CA, USA, 20–21 July 2013; ACM Press: New York, NY, USA, 2013; p. 41. [Google Scholar] [CrossRef] [Green Version]
- Berning, M.; Braun, F.; Riedel, T.; Beigl, M. ProximityHat: A head-worn system for subtle sensory augmentation with tactile stimulation. In Proceedings of the International Symposium on Wearable Computers, Osaka, Japan, 7–11 September 2015; ACM: New York, NY, USA, 2015. [Google Scholar]
- Tsukada, K.; Yasumura, M. Activebelt: Belt-type wearable tactile display for directional navigation. In Proceedings of the International Conference on Ubiquitous Computing, Nottingham, UK, 7–10 September 2004; Springer: Berlin, Germany, 2004; pp. 384–399. [Google Scholar]
- Murata, A.; Kemori, S.; Moriwaka, M.; Hayami, T. Proposal of Automotive 8-directional Warning System That Makes Use of Tactile Apparent Movement. In Proceedings of the International Conference on Digital Human Modeling and Applications in Health, Safety, Ergonomics and Risk Management, Las Vegas, NV, USA, 21–26 July 2013; pp. 98–107. [Google Scholar]
- Telpaz, A.; Rhindress, B.; Zelman, I.; Tsimhoni, O. Haptic Seat for Automated Driving: Preparing the Driver to Take Control Effectively. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’15), Nottingham, UK, 1–3 September 2015; ACM: New York, USA, 2015; pp. 23–30. [Google Scholar] [CrossRef]
- Boll, S.; Asif, A.; Heuten, W. Feel your route: A tactile display for car navigation. IEEE Pervasive Comput. 2011, 10, 35–42. [Google Scholar] [CrossRef]
- Pielot, M.; Henze, N.; Heuten, W.; Boll, S. Evaluation of continuous direction encoding with tactile belts. In Proceedings of the International Workshop on Haptic and Audio Interaction Design, 31 August–1 September 2008; Springer: Berlin, Germany, 2008; pp. 1–10. [Google Scholar]
- Pielot, M.; Boll, S. Tactile Wayfinder: Comparison of tactile waypoint navigation with commercial pedestrian navigation systems. In Proceedings of the International Conference on Pervasive Computing, Helsinki, Finland, 17–20 May 2010; Springer: Berlin, Germany, 2010; pp. 76–93. [Google Scholar]
- Krüger, M.; Wersing, H.; Wiebel-Herboth, C.B. Approach for Enhancing the Perception and Prediction of Traffic Dynamics with a Tactile Interface. In Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI ’18), Toronto, ON, Canada, 23–25 September 2018; ACM Press: New York, NY, USA, 2018; pp. 164–169. [Google Scholar] [CrossRef]
- Krüger, M.; Wiebel-Herboth, C.B.; Wersing, H. The Lateral Line: Augmenting Spatiotemporal Perception with a Tactile Interface. In Proceedings of the AHs ’20: Augmented Humans International Conference, Kaiserslautern, Germany, 16–17 March 2020; ACM Press: New York, NY, USA, 2020. [Google Scholar] [CrossRef]
- Kassner, M.; Patera, W.; Bulling, A. Pupil: An Open Source Platform for Pervasive Eye Tracking and Mobile Gaze-based Interaction. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing Adjunct Publication (UbiComp ’14 Adjunct), Seattle, WA, USA, 13–17 September 2014; ACM Press: New York, NY, USA, 2014; pp. 1151–1160. [Google Scholar] [CrossRef]
- Acik, A.; Bernhard, B.; Dombrowe, I.; Kringe, T.; Märtin, R.; Carl, C.; Honey, C.; Kabisch, C.; Jansen, L.; Lörken, C.; et al. FeelSpace—Report of a Study Project; Technical Report; University of Osnabrück: Osnabrück, Germany, 2005. [Google Scholar]
- Van Erp, J. Tactile navigation display. In Haptic Human-Computer Interaction, Proceedings of the First International Workshop Glasgow, UK, 31 August–1 September 2000; Springer: Berlin/Heidelberg, Germany, 2001; pp. 165–173. [Google Scholar]
- Kerdegari, H.; Kim, Y.; Stafford, T.; Prescott, T.J. Centralizing bias and the vibrotactile funneling illusion on the forehead. In Proceedings of the International Conference on Human Haptic Sensing and Touch Enabled Computer Applications, Versailles, France, 24–26 June 2014; Springer: Berlin, Germany, 2014; pp. 55–62. [Google Scholar]
- Cholewiak, R.W. Spatial factors in the perceived intensity of vibrotactile patterns. Sens. Process. 1979, 3, 141–156. [Google Scholar]
- Hoffmann, S.; Krüger, H.P.; Buld, S. Vermeidung von Simulator Sickness anhand eines Trainings zur Gewöhnung an die Fahrsimulation. VDI Berichte 2003, 1745, 385–404. [Google Scholar]
- Hogema, J.; De Vries, S.; Van Erp, J.; Kiefer, R. A Tactile Seat for Direction Coding in Car Driving: Field Evaluation. IEEE Trans. Haptics 2009, 2, 181–188. [Google Scholar] [CrossRef] [PubMed]
- Hayward, J.C. Near miss determination through use of a scale of danger. In Proceedings of the 51st Annual Meeting of the Highway Research Board, Washington, DC, USA, 17–21 January 1972; pp. 24–34. [Google Scholar]
- Van der Horst, A.R.A. A Time-Based Analysis of Road User Behaviour in Normal and Critical Encounters; Delft University of Technology: Delft, The Netherlands, 1991. [Google Scholar]
- Hart, S.G. Nasa-Task Load Index (NASA-TLX); 20 Years Later. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2006, 50, 904–908. [Google Scholar] [CrossRef] [Green Version]
- Van Der Laan, J.D.; Heino, A.; De Waard, D. A simple procedure for the assessment of acceptance of advanced transport telematics. Transp. Res. Part Emerg. Technol. 1997, 5, 1–10. [Google Scholar] [CrossRef]
- Verhaeghen, P.; Salthouse, T.A. Meta-analyses of age–cognition relations in adulthood: Estimates of linear and nonlinear age effects and structural models. Psychol. Bull. 1997, 122, 231. [Google Scholar] [CrossRef]
- Laurienti, P.J.; Burdette, J.H.; Maldjian, J.A.; Wallace, M.T. Enhanced multisensory integration in older adults. Neurobiol. Aging 2006, 27, 1155–1163. [Google Scholar] [CrossRef]
- Kramer, A.F.; Cassavaugh, N.; Horrey, W.J.; Becic, E.; Mayhugh, J.L. Influence of age and proximity warning devices on collision avoidance in simulated driving. Hum. Factors 2007, 49, 935–949. [Google Scholar] [CrossRef]












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krüger, M.; Driessen, T.; Wiebel-Herboth, C.B.; de Winter, J.C.F.; Wersing, H. Feeling Uncertain—Effects of a Vibrotactile Belt that Communicates Vehicle Sensor Uncertainty. Information 2020, 11, 353. https://doi.org/10.3390/info11070353
Krüger M, Driessen T, Wiebel-Herboth CB, de Winter JCF, Wersing H. Feeling Uncertain—Effects of a Vibrotactile Belt that Communicates Vehicle Sensor Uncertainty. Information. 2020; 11(7):353. https://doi.org/10.3390/info11070353
Chicago/Turabian StyleKrüger, Matti, Tom Driessen, Christiane B. Wiebel-Herboth, Joost C. F. de Winter, and Heiko Wersing. 2020. "Feeling Uncertain—Effects of a Vibrotactile Belt that Communicates Vehicle Sensor Uncertainty" Information 11, no. 7: 353. https://doi.org/10.3390/info11070353
APA StyleKrüger, M., Driessen, T., Wiebel-Herboth, C. B., de Winter, J. C. F., & Wersing, H. (2020). Feeling Uncertain—Effects of a Vibrotactile Belt that Communicates Vehicle Sensor Uncertainty. Information, 11(7), 353. https://doi.org/10.3390/info11070353