Direction of Arrival Estimation Using Augmentation of Coprime Arrays


Abstract
:1. Introduction
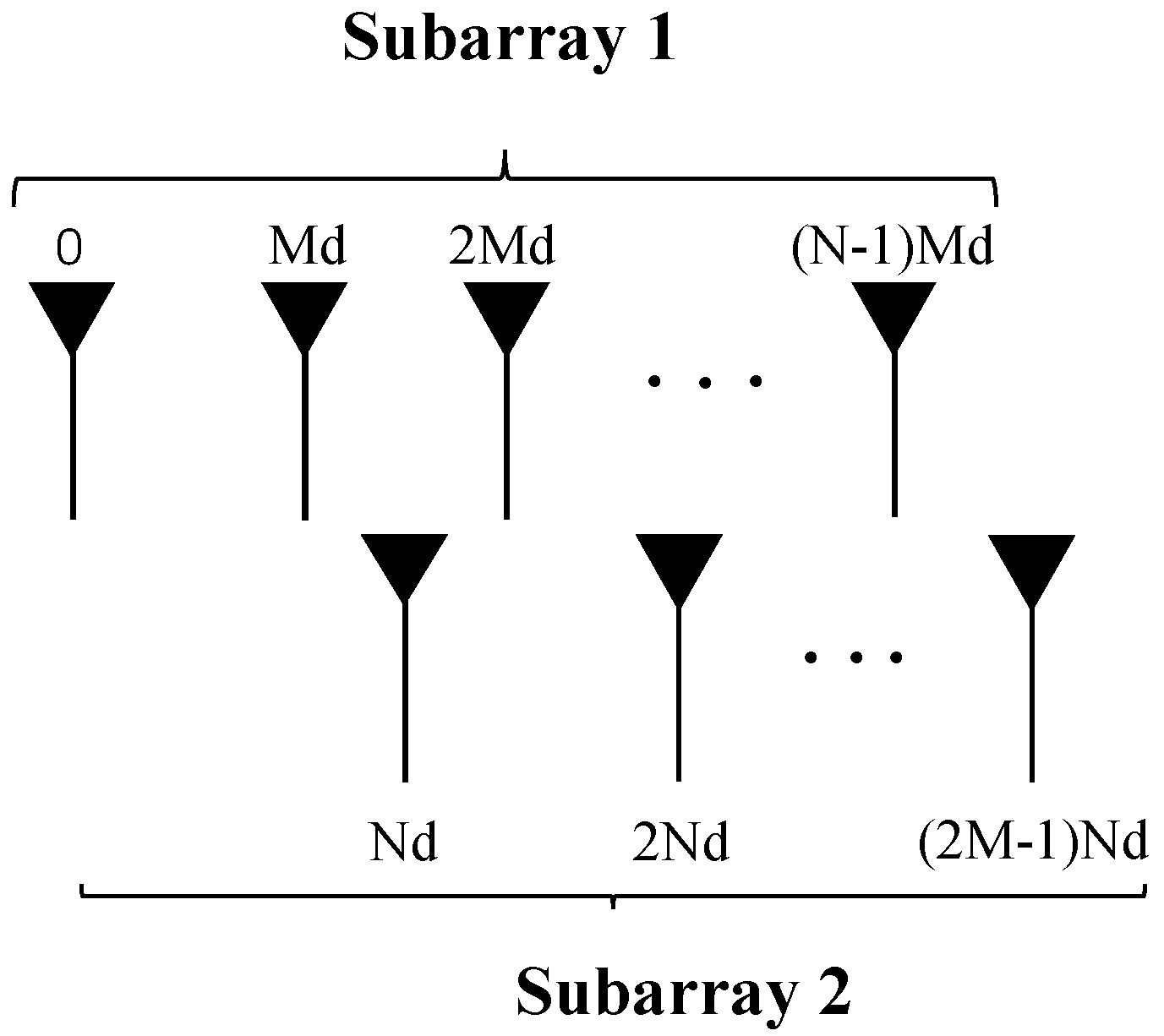
2. System Model
3. Coarray Interpolation
3.1. MUSIC Algorithm Based on Central Contiguous ULA
3.2. Hybrid Coarray Interpolation
4. Active Coarray Interpolation (ACI)
- The existing approaches recover the covariance matrix of the augmented coarray from the original covariance matrix of a source signal needs reshaping and spatial smoothing operations, while the ACI approach does not need these operations; consequently, the intricacy of the proposed approach reduced significantly.
- MUSIC Algorithm Based on Central Contiguous ULA only focus on the consecutive lags mainly around the origin of difference co-array set, while the proposed ACI approach utilizes the augmented coarray set (); hence, it achieves a higher number of DOF.
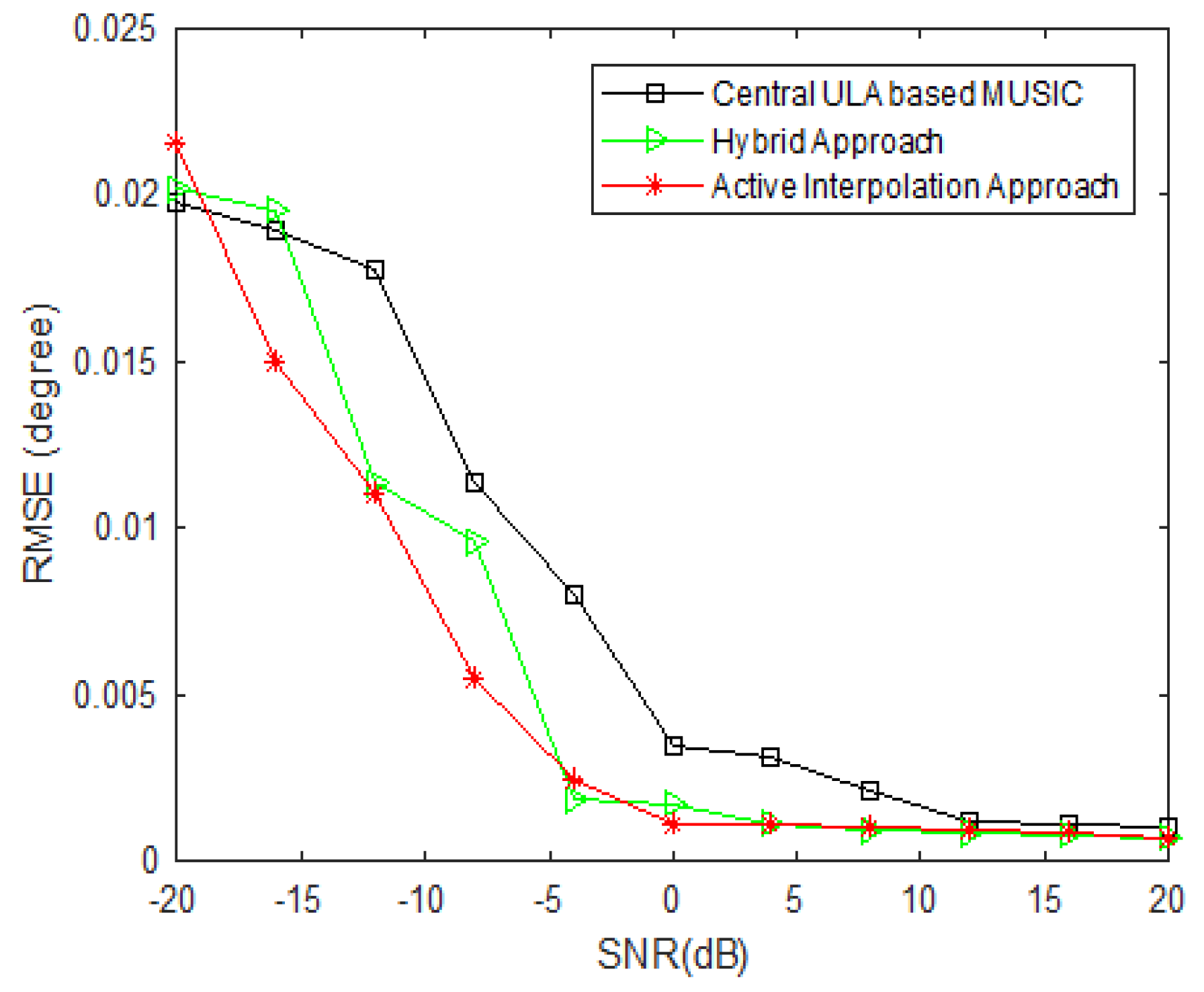
- Experimentally compared results with counterparts specifies that the proposed ACI offers better performance in terms of complexity, Root Mean Square Error (RMSE) and probability of resolution. The outlines of ACI approach is presented in the Table 1.
5. Simulation Results and Discussion
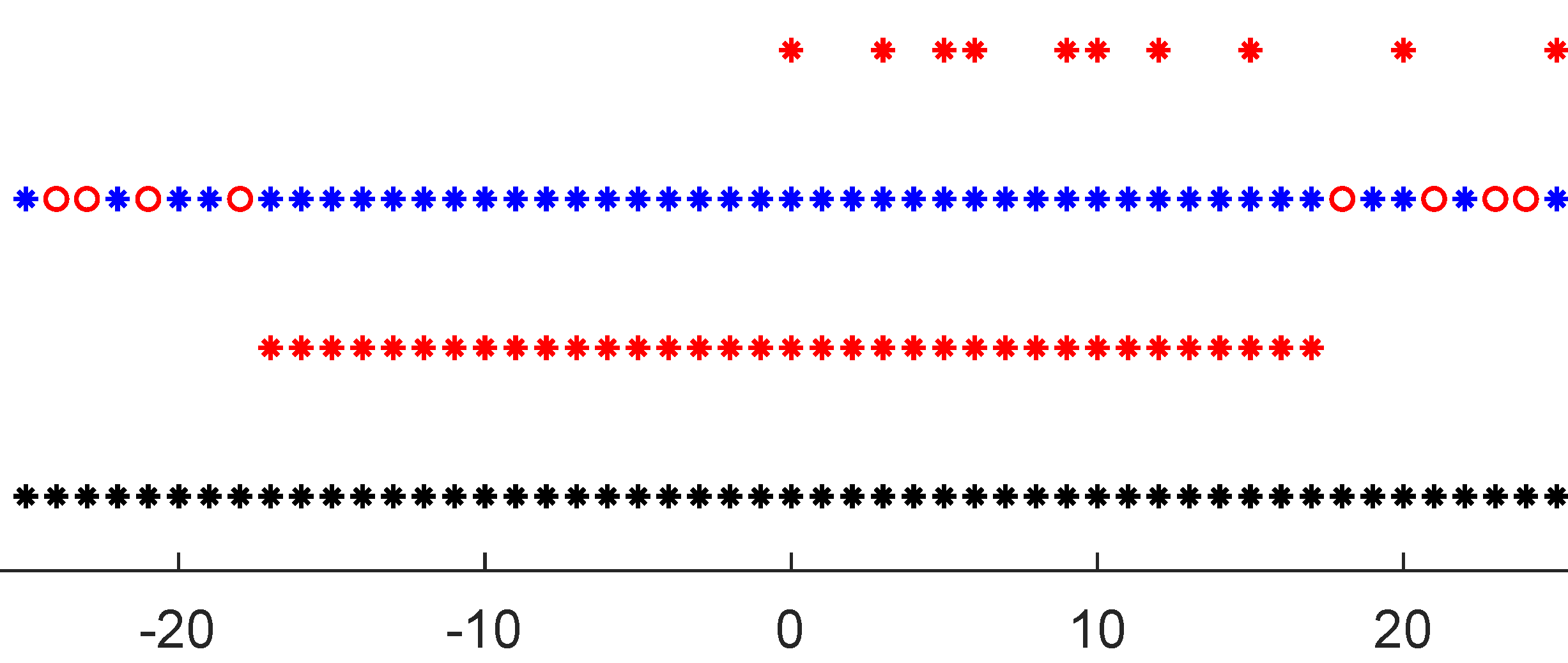
5.1. DOF Comparison
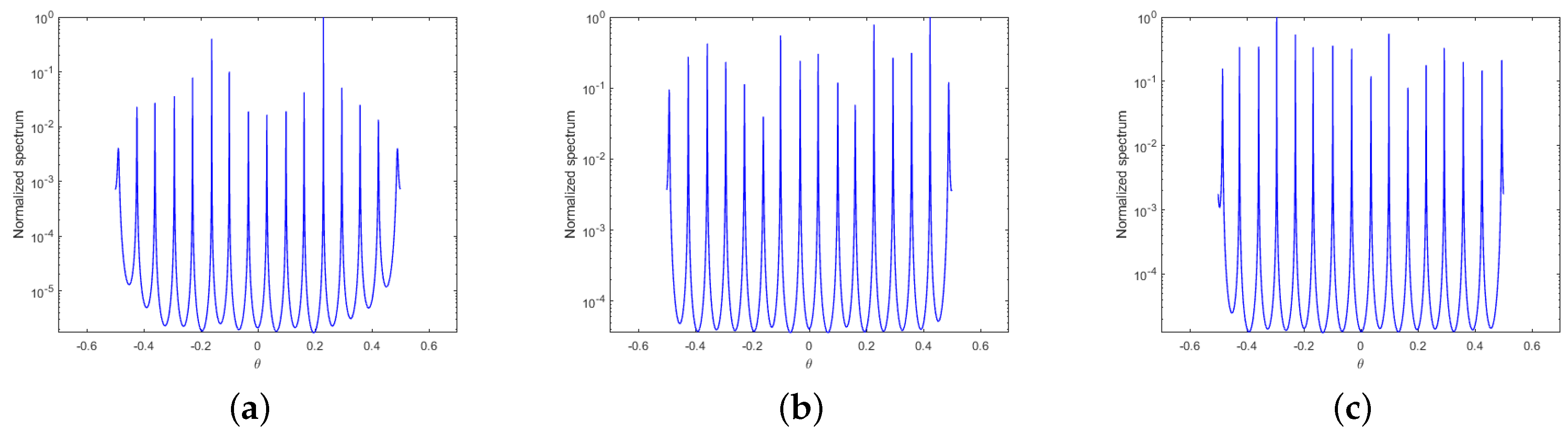
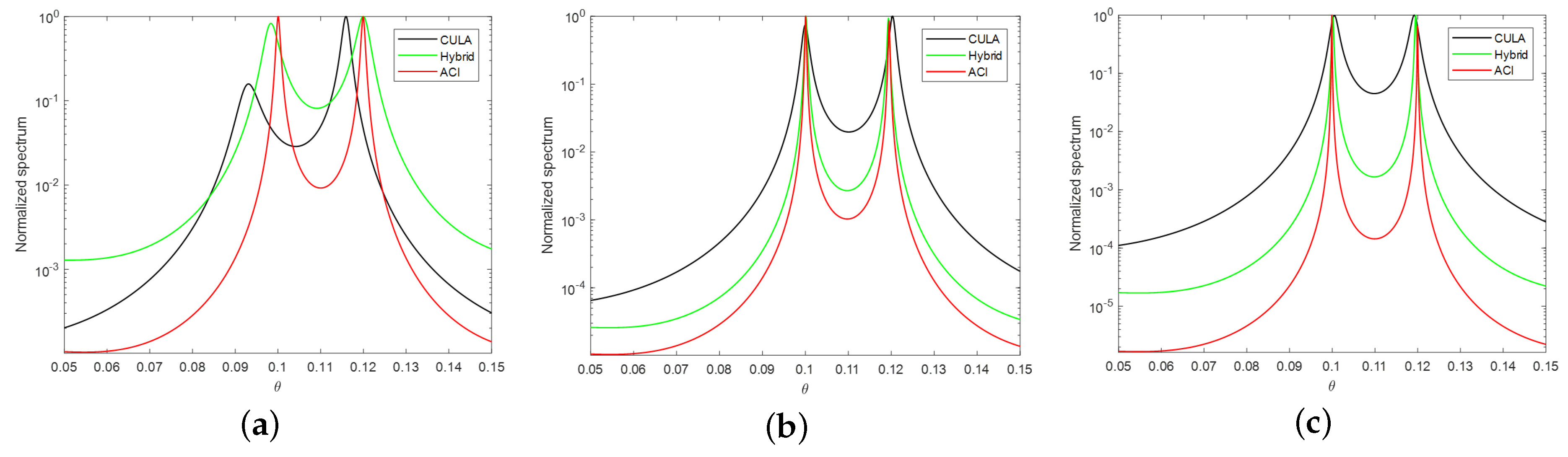
5.2. MUSIC Spectrum
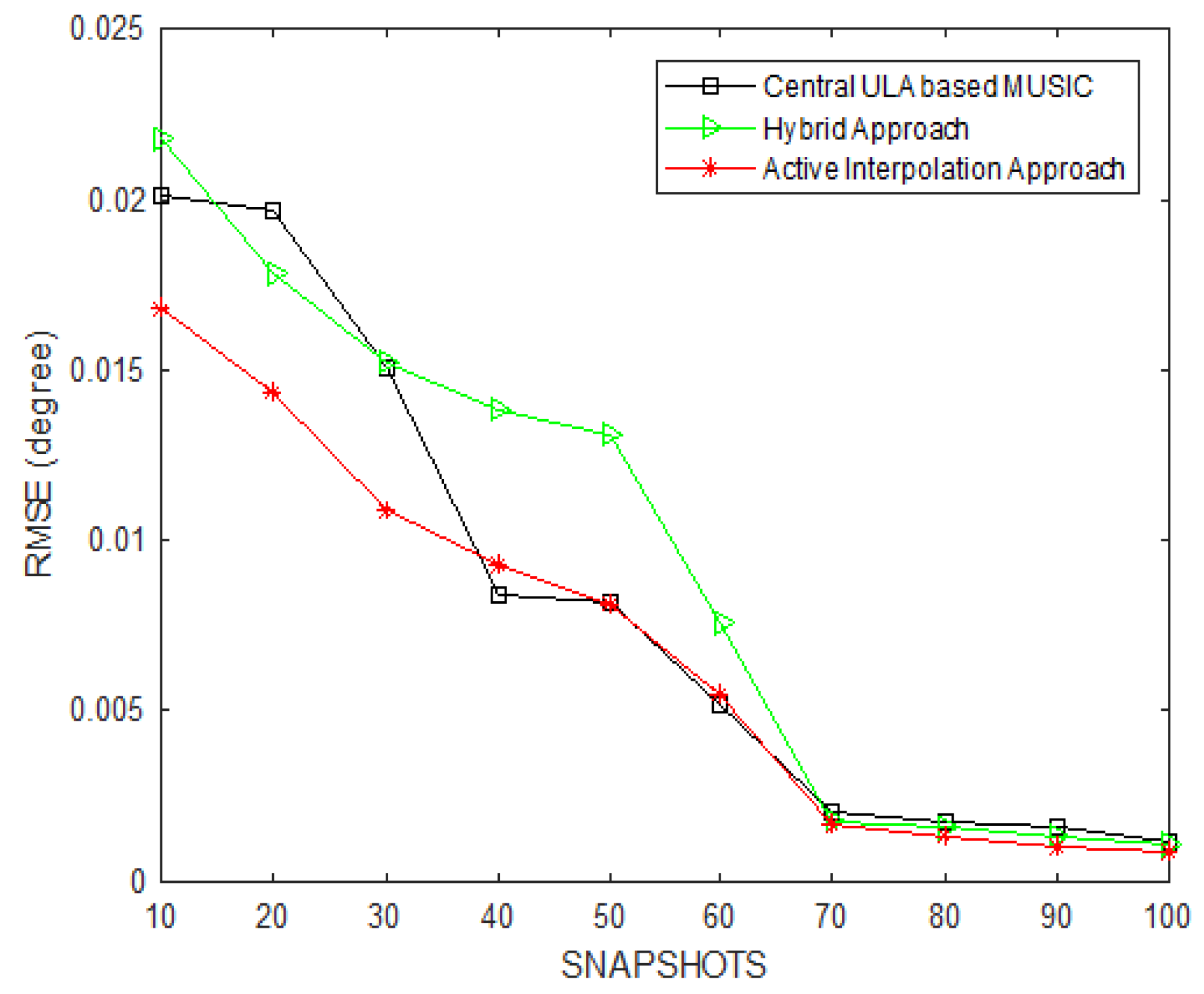
5.3. Root Mean Square Error (RMSE)
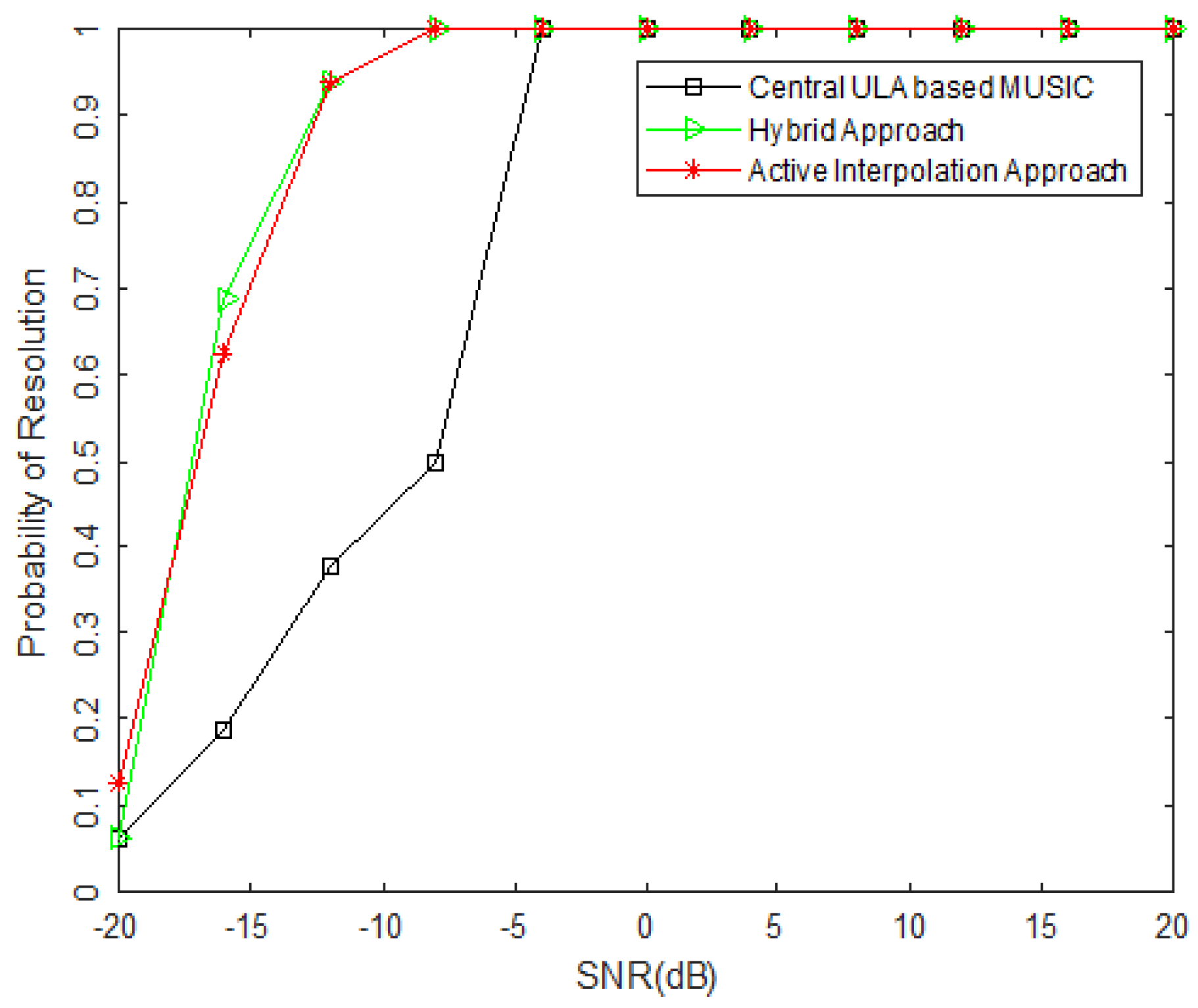
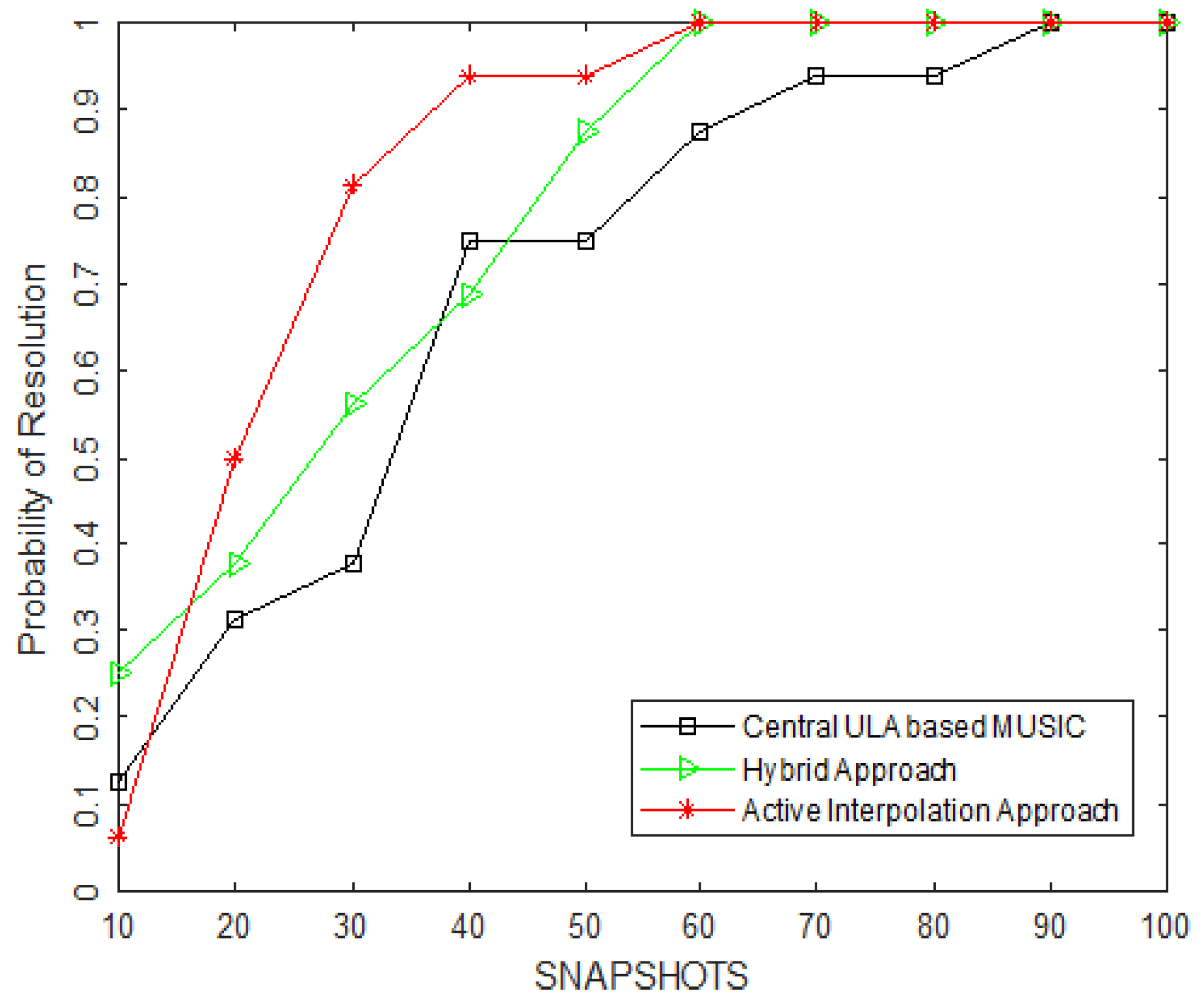
5.4. Probability of Resolution
5.5. Angular Resolution
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Moffet, A. Minimum-redundancy linear arrays. IEEE Trans. Antennas Propag. 1968, 16, 172–175. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.L.; Vaidyanathan, P.P. High order super nested arrays. In Proceedings of the IEEE Sensor Array and Multichannel Signal Processing Workshop (SAM), Rio de Janeiro, Brazil, 10–13 July 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Vaidyanathan, P.P.; Pal, P. Sparse Sensing With Co-Prime Samplers and Arrays. IEEE Trans. Signal Process. 2011, 59, 573–586. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.D.; Amin, M.G. Generalized Coprime Array Configurations for Direction-of-Arrival Estimation. IEEE Trans. Signal Process. 2015, 63, 1377–1390. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P.P. Remarks on the Spatial Smoothing Step in Coarray MUSIC. IEEE Signal Process. Lett. 2015, 22, 1438–1442. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Coprime sampling and the music algorithm. In Proceedings of the Digital Signal Processing and Signal Processing Education Meeting (DSP/SPE), Sedona, AZ, USA, 4–7 January 2011; pp. 289–294. [Google Scholar] [CrossRef]
- Shan, T.J.; Wax, M.; Kailath, T. On spatial smoothing for direction-of-arrival estimation of coherent signals. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 806–811. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Nested Arrays: A Novel Approach to Array Processing With Enhanced Degrees of Freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef] [Green Version]
- Ramirez, J.; Krolik, J. Multiple source localization with moving co-prime arrays. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brisbane, QLD, Australia, 19–24 April 2015; pp. 2374–2378. [Google Scholar] [CrossRef]
- Abramovich, Y.I.; Spencer, N.K.; Gorokhov, A.Y. Positive-definite Toeplitz completion in DOA estimation for nonuniform linear antenna arrays. II. Partially augmentable arrays. IEEE Trans. Signal Process. 1999, 47, 1502–1521. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Amin, M.G.; Himed, B. Sparsity-based DOA estimation using co-prime arrays. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 3967–3971. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.D.; Amin, M.G.; Himed, B. DOA estimation exploiting a uniform linear array with multiple co-prime frequencies. Signal Process. 2017, 130, 37–46. [Google Scholar] [CrossRef] [Green Version]
- Raza, A.; Liu, W.; Shen, Q. Thinned co-prime arrays for DOA estimation. In Proceedings of the 25th European Signal Processing Conference (EUSIPCO), Kos, Greece, 28 August–2 September 2017; pp. 395–399. [Google Scholar] [CrossRef]
- Liu, A.; Yang, Q.; Zhang, X.; Deng, W. Direction-of-Arrival Estimation for Coprime Array Using Compressive Sensing Based Array Interpolation. Int. J. Antennas Propag. 2017, 2017, 1–10. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P.P.; Pal, P. Coprime coarray interpolation for DOA estimation via nuclear norm minimization. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Montréal, QC, Canada, 22–25 May 2016; pp. 2639–2642. [Google Scholar] [CrossRef]
- Wu, C.; Zhang, M.; Wang, K. Underdetermined DOA estimation based on covariance matrix reconstruction using co-prime array. In Proceedings of the International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Montreal, QC, Canada, 22–25 May 2017; pp. 671–674. [Google Scholar] [CrossRef]
- Tan, Z.; Eldar, Y.C.; Nehorai, A. Direction of Arrival Estimation Using Co-Prime Arrays: A Super Resolution Viewpoint. IEEE Trans. Signal Process. 2014, 62, 5565–5576. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; Shi, Z.; Gu, Y.; Goodman, N.A. Doa estimation by covariance matrix sparse reconstruction of co-prime array. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brisbane, QLD, Australia, 19–24 April 2015; pp. 2369–2373. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X. DOA estimation with k-times extended co-prime arrays. In Proceedings of the 51st Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 29 October–1 November 2017; pp. 1183–1187. [Google Scholar] [CrossRef]
- BouDaher, E.; Ahmad, F.; Amin, M.G. Sparsity-based extrapolation for direction-of-arrival estimation using co-prime arrays. In Proceedings of the SPIE, Baltimore, MD, USA, 17–21 April 2016; Volume 9857. [Google Scholar] [CrossRef]
- Guo, M.; Chen, T.; Wang, B. An Improved DOA Estimation Approach Using Coarray Interpolation and Matrix Denoising. Sensors 2017, 17, 1140. [Google Scholar] [CrossRef] [PubMed]
- Shi, Z.; Zhou, C.; Gu, Y.; Goodman, N.A.; Qu, F. Source Estimation Using Coprime Array: A Sparse Reconstruction Perspective. IEEE Sens. J. 2017, 17, 755–765. [Google Scholar] [CrossRef]
- Shen, Q.; Liu, W.; Cui, W.; Wu, S.; Zhang, Y.D.; Amin, M.G. Low-Complexity Direction-of-Arrival Estimation Based on Wideband Co-Prime Arrays. IEEE/ACM Trans. Audio Speech Lang. Process. 2015, 23, 1445–1456. [Google Scholar] [CrossRef]
- Yang, M.; Haimovich, A.M.; Yuan, X.; Sun, L.; Chen, B. A Unified Array Geometry Composed of Multiple Identical Subarrays With Hole-Free Difference Coarrays for Underdetermined DOA Estimation. IEEE Access 2018, 6, 14238–14254. [Google Scholar] [CrossRef]
- Rao, B.D.; Hari, K.V.S. Performance analysis of Root-Music. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 1939–1949. [Google Scholar] [CrossRef]
- Tan, Z.; Nehorai, A.; Eldar, Y.C. Continuous sparse recovery for direction of arrival estimation with co-prime arrays. In Proceedings of the IEEE 8th Sensor Array and Multichannel Signal Processing Workshop (SAM), A Coruna, Spain, 22–25 June 2014; pp. 393–396. [Google Scholar] [CrossRef]
- Wang, Y.; Trinkle, M.; Ng, B.W.H. DOA Estimation under Unknown Mutual Coupling and Multipath with Improved Effective Array Aperture. Sensors 2015, 15, 30856–30869. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Semira, H.; Belkacemi, H.; Marcos, S. High-Resolution Source Localization Algorithm Based on the Conjugate Gradient. EURASIP J. Adv. Signal Process. 2007, 2007, 073871. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | The received signals |
| Output | Direction of arrival estimation |
| Step 1 | Construct Covariance Matrix |
| Step 2 | Optimize to get Toeplitz matrix from (17) |
| Step 3 | Obtain noise subspace by conducting eigen-decomposition of . |
| Step 4 | Compute (20) and to get sharp peaks correspond to the direction of the sources. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hassan, T.U.; Gao, F.; Jalal, B.; Arif, S. Direction of Arrival Estimation Using Augmentation of Coprime Arrays. Information 2018, 9, 277. https://doi.org/10.3390/info9110277
Hassan TU, Gao F, Jalal B, Arif S. Direction of Arrival Estimation Using Augmentation of Coprime Arrays. Information. 2018; 9(11):277. https://doi.org/10.3390/info9110277
Chicago/Turabian StyleHassan, Tehseen Ul, Fei Gao, Babur Jalal, and Sheeraz Arif. 2018. "Direction of Arrival Estimation Using Augmentation of Coprime Arrays" Information 9, no. 11: 277. https://doi.org/10.3390/info9110277
APA StyleHassan, T. U., Gao, F., Jalal, B., & Arif, S. (2018). Direction of Arrival Estimation Using Augmentation of Coprime Arrays. Information, 9(11), 277. https://doi.org/10.3390/info9110277