Hydrodynamically Lubricated and Grooved Biomimetic Self-Adapting Surfaces


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction






2. Methodology
2.1. Normalization Scheme



2.2. Analytical Model



2.3. Numerical Model
3. Results
Single Groove Results
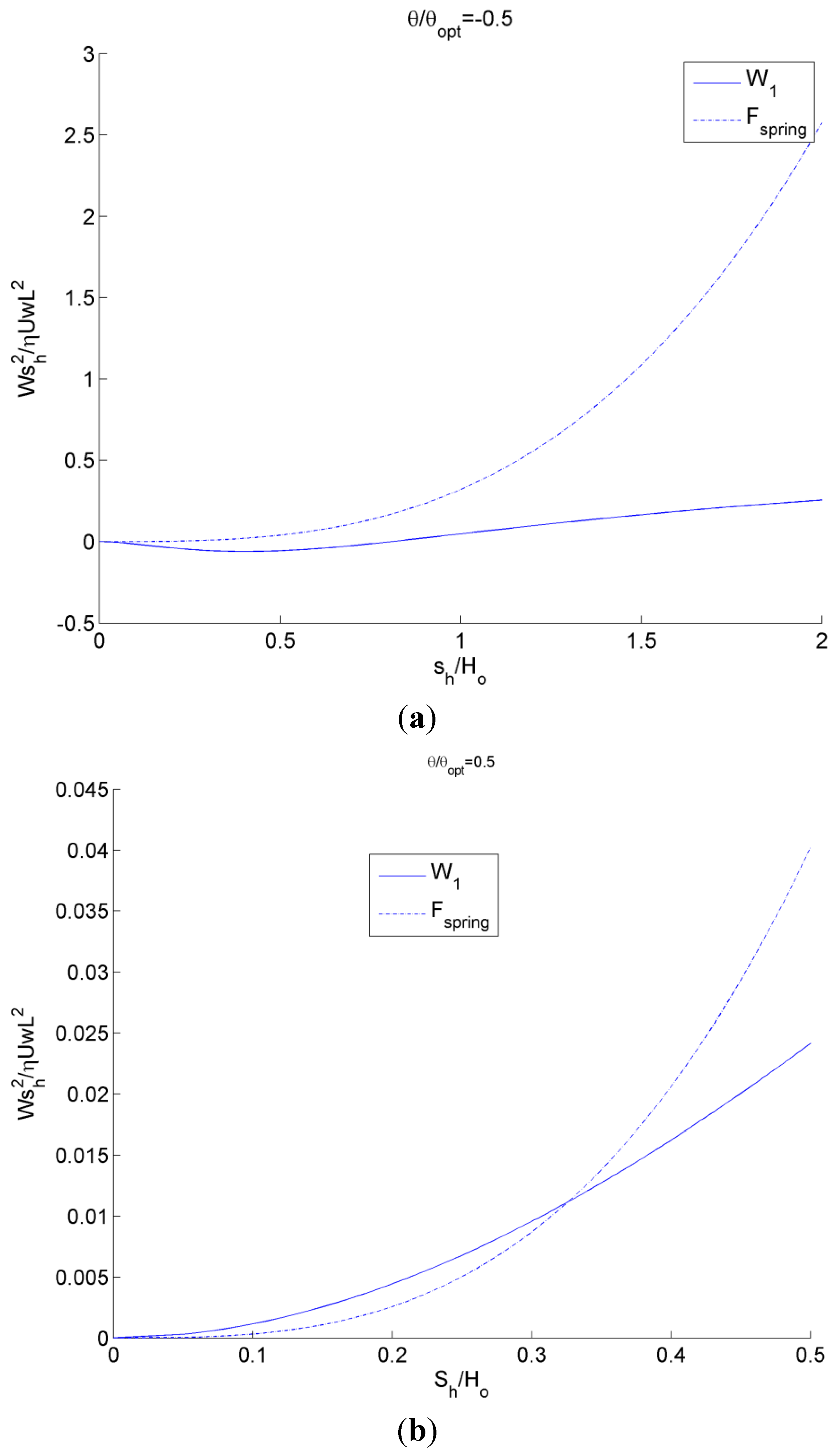
 )i. This results in the following equation for the linear spring:
)i. This results in the following equation for the linear spring:







4. Multiple Groove Results



5. Conclusions
Nomenclature
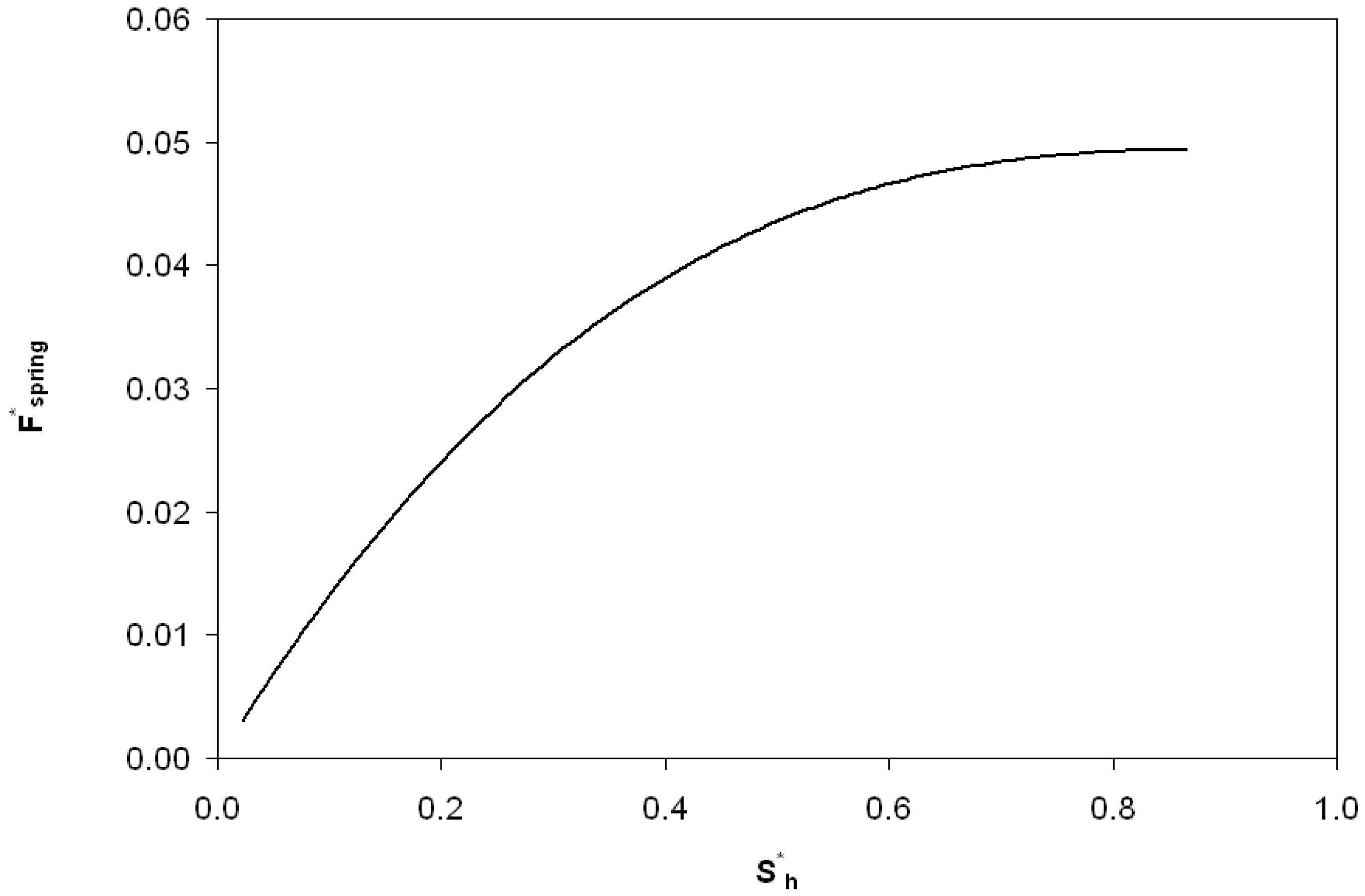
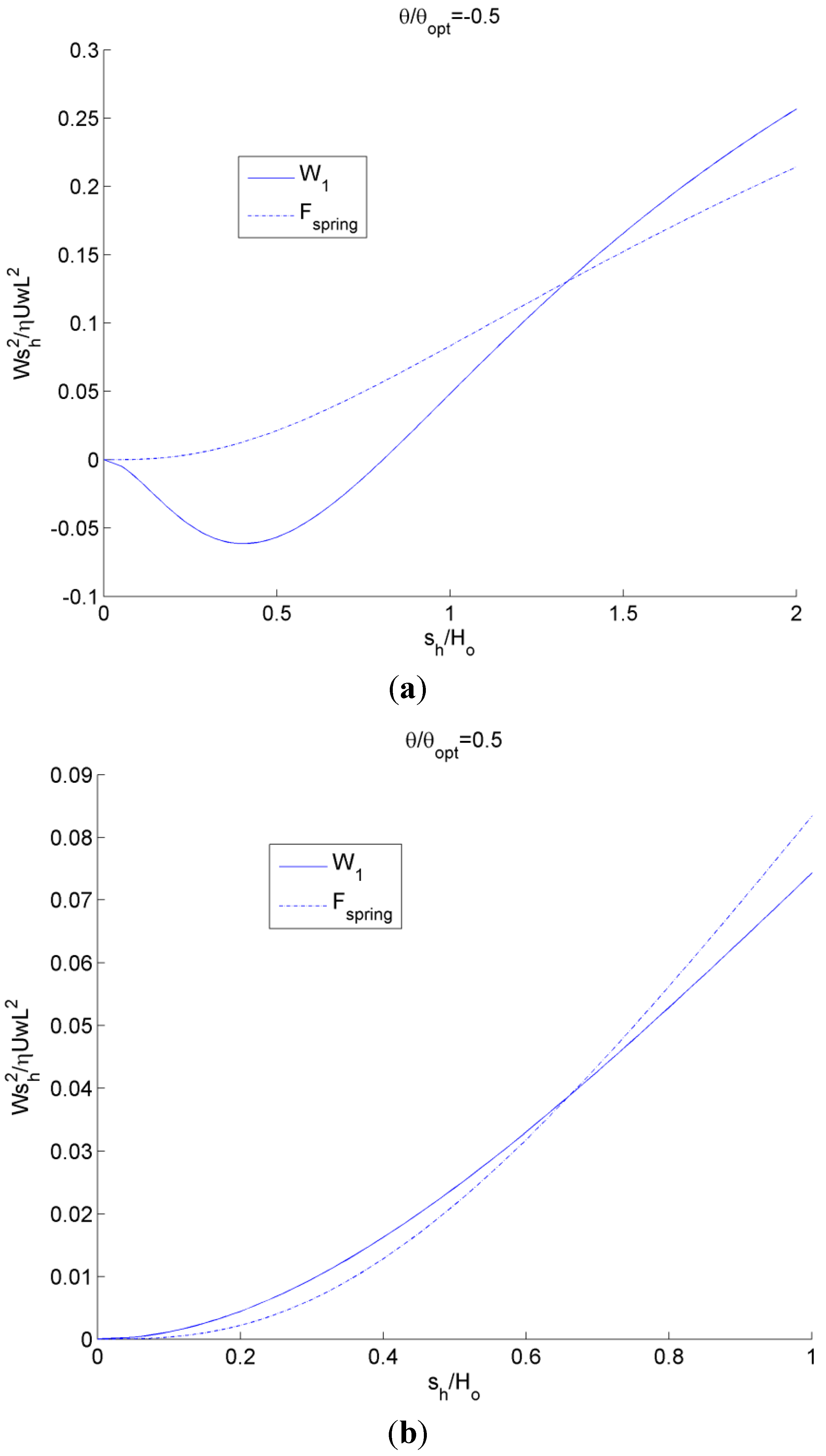
| Fspring | spring force |
 | normalized spring force |
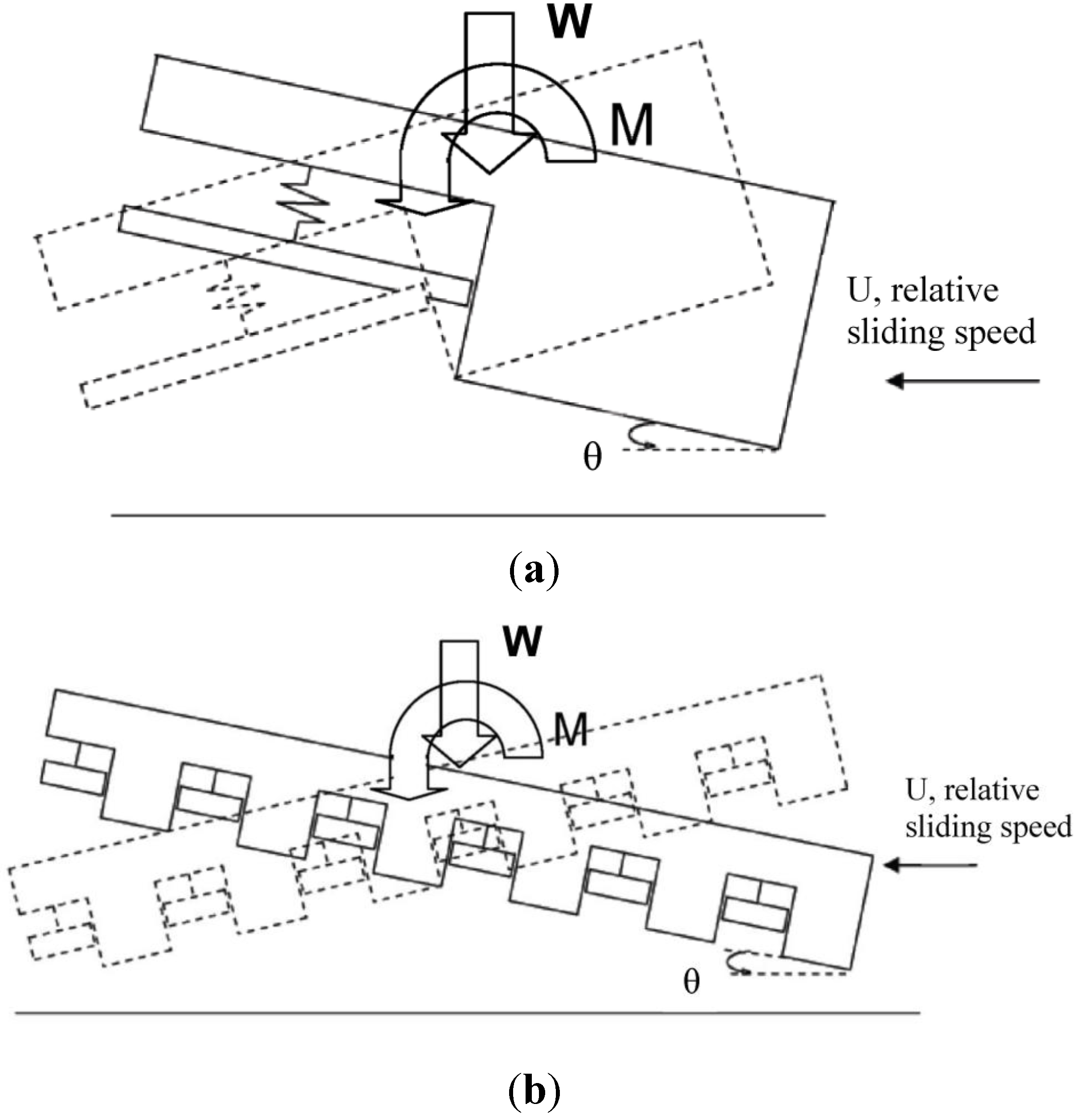
| M | restoring moment from fluid pressure |
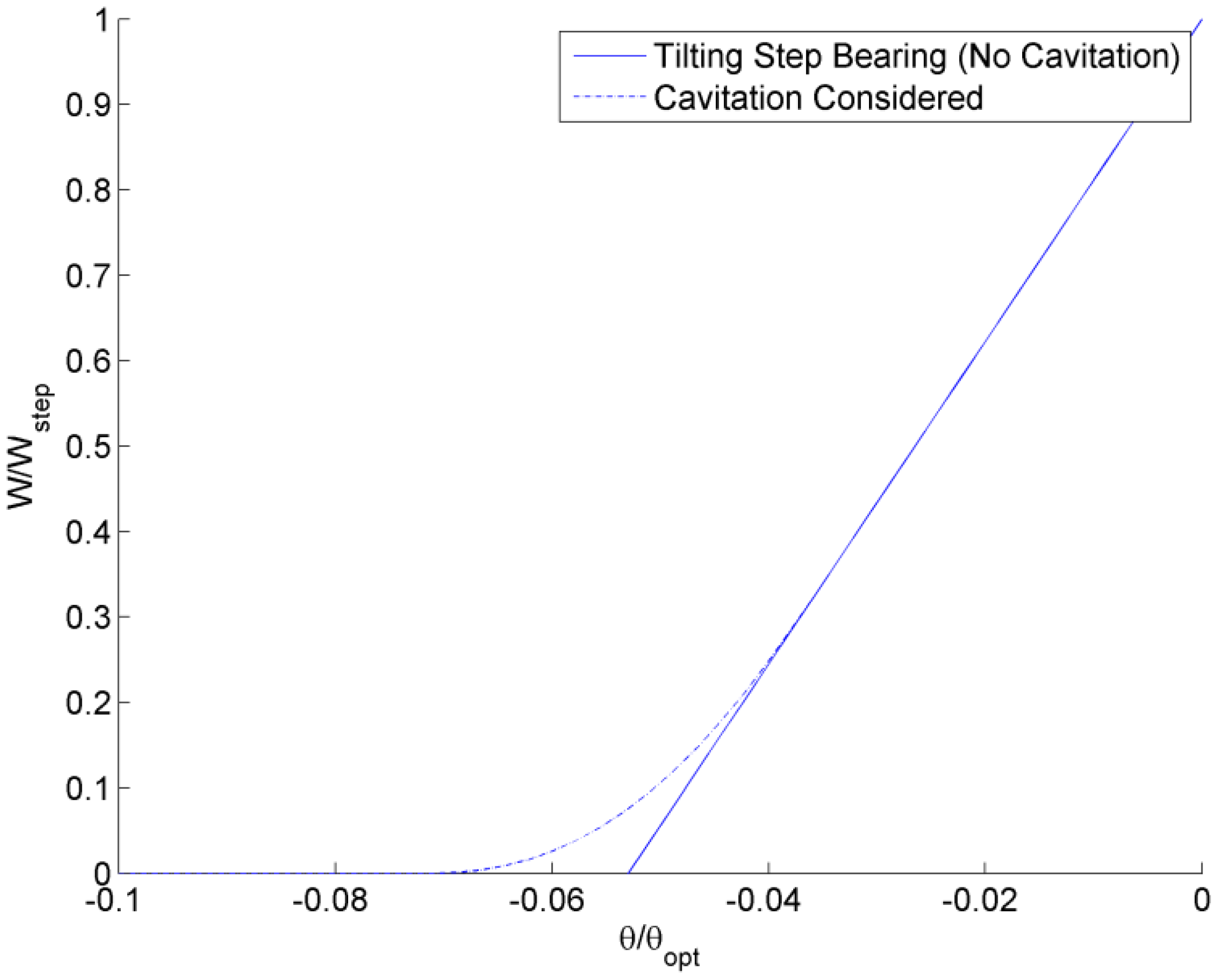
| W | total fluid lift force |
| W1 | fluid lift force on the inset of a step bearing |
| Wstep | fluid lift force for a single groove on a grooved surface |
| Ho | desired film thickness |
| h | film thickness |
| hi | local film thickness on groove segment i |
| hmin | local minimum film thickness of one groove section |
| ho | minimum film thickness |
| k | spring stiffness coefficient |
| l | bearing length or one groove segment length |
| L | grooved surface length |
| M | restoring moment |
| M* | normalized restoring moment |
| N | number of grooves on surface |
| ns | bearing step length ratio (step length/total length) |
| p | fluid pressure |
| sh | bearing step inset height |
| , sh | normalized by ho |
| U | sliding speed |
| w | bearing width |
| x | location on a groove segment relative to the location of hmin |
| µ | dynamic viscosity |
| θ | tilt of the bearing surface |
| θopt | optimal tilt of an incline bearing |
Appendix
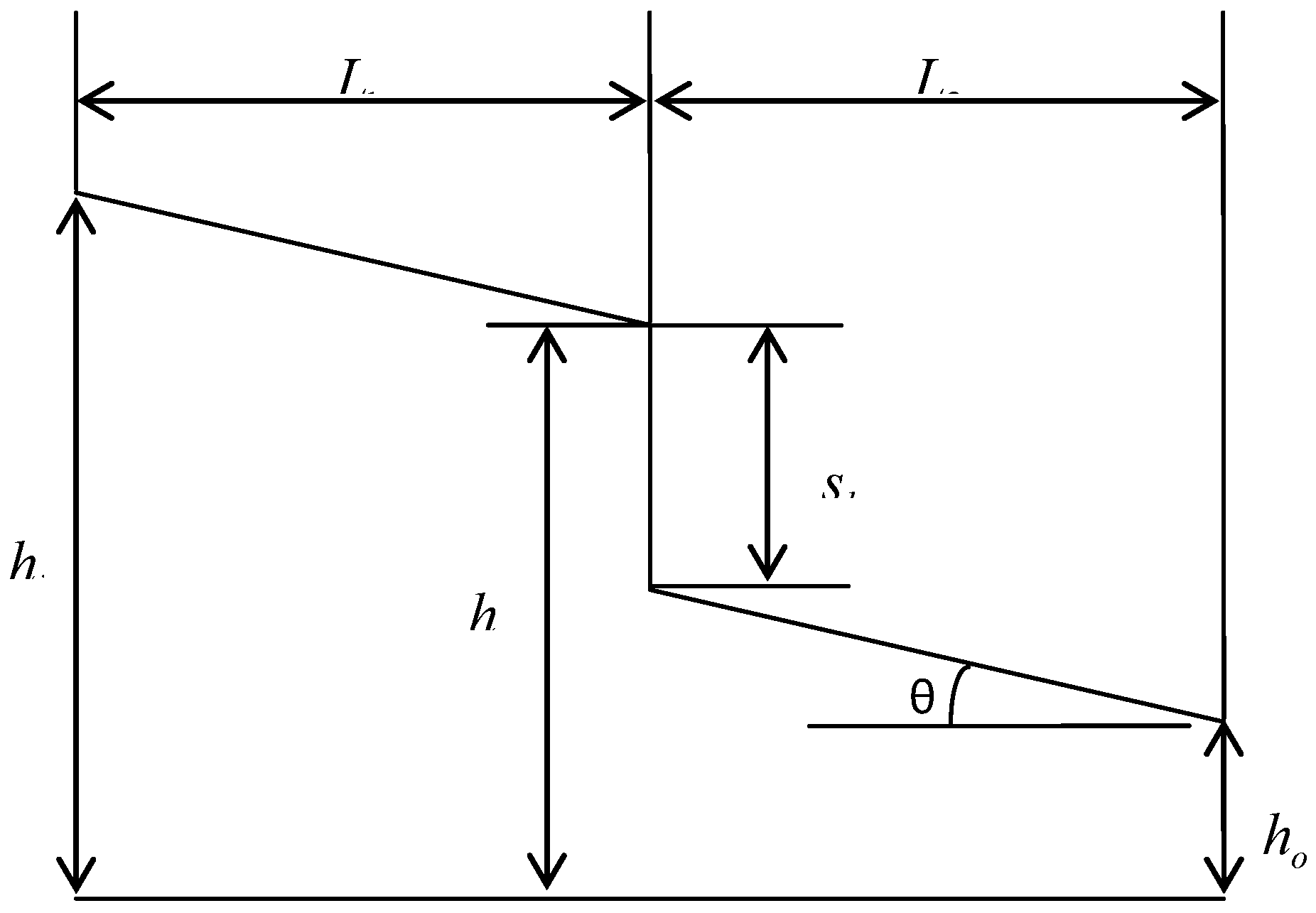
A.1. Tilted Static Step Bearing Solution





- 1)
- At the inlet, h = hi, p1 = 0;
- 2)
- At the outlet, h = ho, p2 = 0;
- 3)
- At the step, h = hs or sh, p1 = p2 and q1 = q2.






 , and substitute to give
, and substitute to give

 , and then substituting gives
, and then substituting gives



A.2. Tilted Self-Adapting Step Bearing Case

Conflicts of Interest
References
- Singh, R.A.; Yoon, E.-S.; Jackson, R.L. Biomimetics: The science of imitating nature. Tribol. Lubr. Technol. 2009, 65, 40–47. [Google Scholar]
- Kligerman, Y.; Etsion, I. Analysis of the hydrodynamic effects in a surface textured circumferential gas seal. Tribol. Trans. 2001, 44, 472–478. [Google Scholar] [CrossRef]
- Etsion, I.; Kligerman, Y.; Halperin, G. Analytical and experimental investigation of laser-textured mechanical seal faces. Tribol. Trans. 1999, 42, 511–516. [Google Scholar] [CrossRef]
- Kovalchenko, A.; Ajayi, O.; Erdemir, A.; Fenske, G.; Etsion, I. The effect of laser texturing of steel surfaces and speed-load parameters on the transition of lubrication regime from boundary to hydrodynamic. Tribol. Trans. 2004, 47, 299–307. [Google Scholar] [CrossRef]
- Ryk, G.; Kligerman, Y.; Etsion, I. Experimental investigation of laser surface texturing for reciprocating automotive components. Tribol. Trans. 2002, 45, 444–449. [Google Scholar] [CrossRef]
- Ronen, A.; Etsion, I.; Kligerman, Y. Friction-reducing surface-texturing in reciprocating automotive components. Tribol. Trans. 2001, 44, 359–366. [Google Scholar] [CrossRef]
- Etsion, I. State of the art in laser surface texturing. J. Tribol. 2005, 127, 248–253. [Google Scholar] [CrossRef]
- Etsion, I.; Halperin, G. A laser surface textured hydrostatic mechanical seal. Tribol. Trans. 2002, 45, 430–434. [Google Scholar] [CrossRef]
- Brizmer, V.; Kligerman, Y.; Etsion, I. A laser surface textured parallel thrust bearing. Tribol. Trans. 2003, 46, 397–403. [Google Scholar] [CrossRef]
- Glavatskih, S.; McCarthy, D.; Sherrington, I. Hydrodynamic performance of a thrust bearing with micropatterned pads. Tribol. Trans. 2005, 48, 492–498. [Google Scholar] [CrossRef]
- Wang, X.; Kato, K.; Adachi, K.; Aizawa, K. Loads carrying capacity map for the surface texture design of SiC thrust bearing sliding in water. Tribol. Int. 2003, 36, 189–197. [Google Scholar] [CrossRef]
- Lebeck, A.O. Parallel sliding load support in the mixed friction regime. Part 1—The Experimental Data. J. Tribol. 1987, 109, 189–195. [Google Scholar] [CrossRef]
- Lebeck, A.O. Parallel sliding load support in the mixed friction regime. Part 2—Evaluation of the Mechanisms. J. Tribol. 1987, 109, 196–205. [Google Scholar] [CrossRef]
- Wang, X.; Kato, K.; Adachi, K.; Aizawa, K. The effect of laser texturing of SiC surface on the critical load for the transition of water lubrication mode from hydrodynamic to mixed. Tribol. Int. 2001, 34, 703–711. [Google Scholar] [CrossRef]
- Wang, Q.J.; Zhu, D. Virtual texturing: Modeling the performance of lubricated contacts of engineered surfaces. J. Tribol. 2005, 127, 722–728. [Google Scholar] [CrossRef]
- Harp, S.R.; Salant, R.F. Inter-asperity cavitation and global cavitation in seals: An average flow analysis. Tribol. Int. 2002, 35, 113–121. [Google Scholar] [CrossRef]
- Ruan, B.; Salant, R.F.; Green, I. Mixed lubrication model of liquid/gas mechanical face seals. Tribol. Trans. 1997, 40, 647–957. [Google Scholar] [CrossRef]
- Shen, D.; Salant, R.F. Elastohydrodynamic analysis of the effect of shaft surface finish on rotary lip seal behavior. Trib. Trans. 2003, 46, 391–396. [Google Scholar] [CrossRef]
- Shi, F.; Salant, R.F. Mixed soft elastohydrodynamic lubrication model with interasperity cavitation and surface shear deformation. J. Tribol. 2000, 122, 308–316. [Google Scholar] [CrossRef]
- Tonder, K.; Salant, R. Non-leaking lip seals: A roughness effect study. J. Tribol. 1992, 114, 595–599. [Google Scholar] [CrossRef]
- Raimondi, A.A.; Boyd, J. Applying bearing theory to the analysis and design of pad-type bearings. ASME Trans. 1955, 77, 287–309. [Google Scholar]
- Jackson, R.L. Self adapting mechanical step bearings for variations in load. Tribol. Lett. 2005, 20, 11–20. [Google Scholar] [CrossRef]
- Duvvuru, R.S.; Jackson, R.L.; Hong, J.W. Self-adapting microscale surface grooves for hydrodynamic lubrication. Tribol. Trans. 2009, 52, 1–11. [Google Scholar] [CrossRef]
- Fesanghary, M.; Khonsari, M.M. On self-adaptive surface grooves. Tribol. Trans. 2010, 53, 871–880. [Google Scholar] [CrossRef]
- Fesanghary, M.; Khonsari, M.M. On the shape optimization of self-adaptive grooves. Tribol. Trans. 2011, 54, 256. [Google Scholar] [CrossRef]
- Hamrock, B.J. Fundamentals of Fluid Film Lubrication; Mcgraw-Hill Inc.: New York, NY, USA, 1994. [Google Scholar]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Jackson, R.L.; Lei, J. Hydrodynamically Lubricated and Grooved Biomimetic Self-Adapting Surfaces. J. Funct. Biomater. 2014, 5, 78-98. https://doi.org/10.3390/jfb5020078
Jackson RL, Lei J. Hydrodynamically Lubricated and Grooved Biomimetic Self-Adapting Surfaces. Journal of Functional Biomaterials. 2014; 5(2):78-98. https://doi.org/10.3390/jfb5020078
Chicago/Turabian StyleJackson, Robert L., and Jiang Lei. 2014. "Hydrodynamically Lubricated and Grooved Biomimetic Self-Adapting Surfaces" Journal of Functional Biomaterials 5, no. 2: 78-98. https://doi.org/10.3390/jfb5020078
APA StyleJackson, R. L., & Lei, J. (2014). Hydrodynamically Lubricated and Grooved Biomimetic Self-Adapting Surfaces. Journal of Functional Biomaterials, 5(2), 78-98. https://doi.org/10.3390/jfb5020078