A Novel Lightweight Wearable Soft Exosuit for Reducing the Metabolic Rate and Muscle Fatigue

 , ,
, ,
Abstract
:1. Introduction
2. System Overview
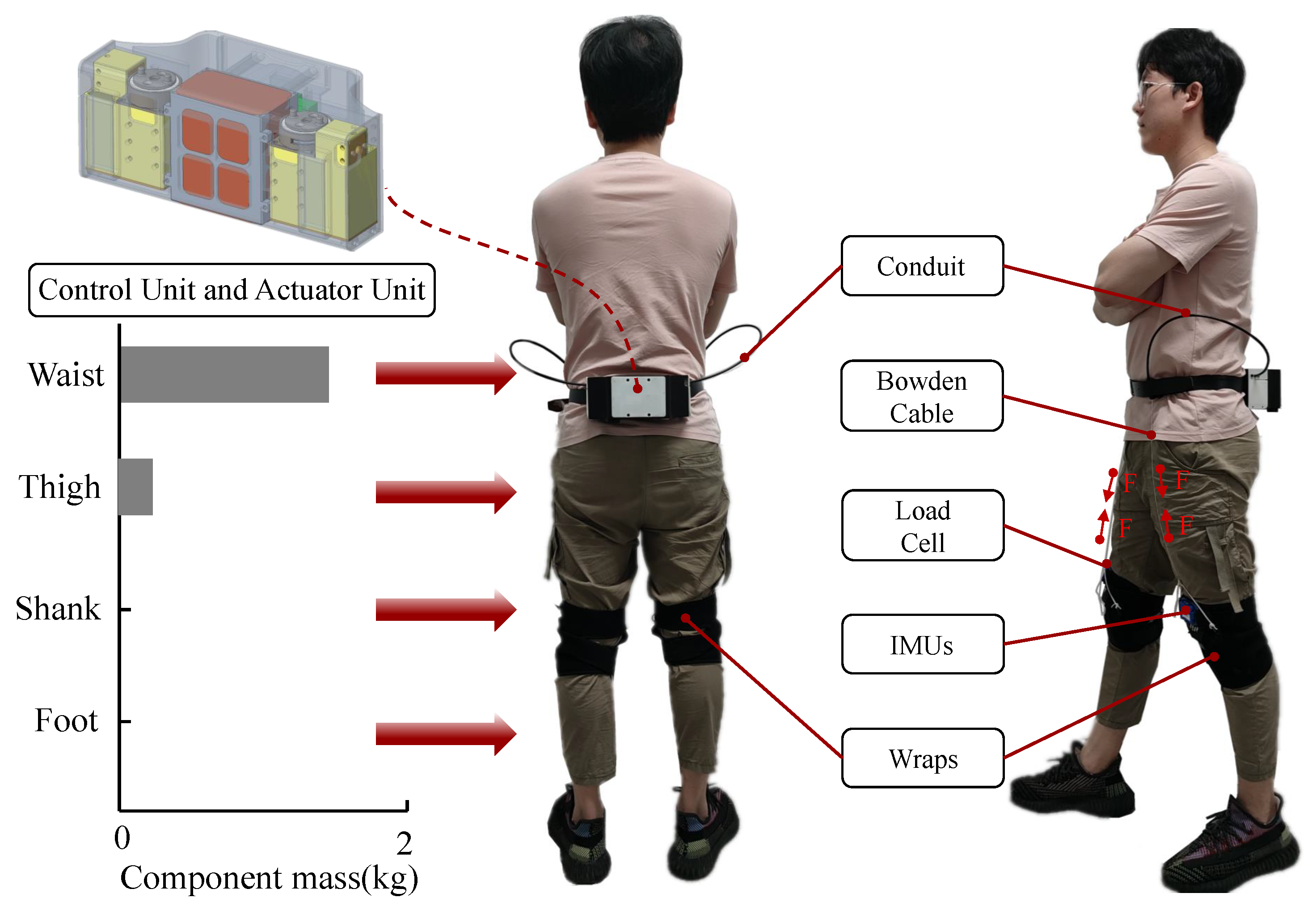
2.1. Prototype of Soft Exosuit
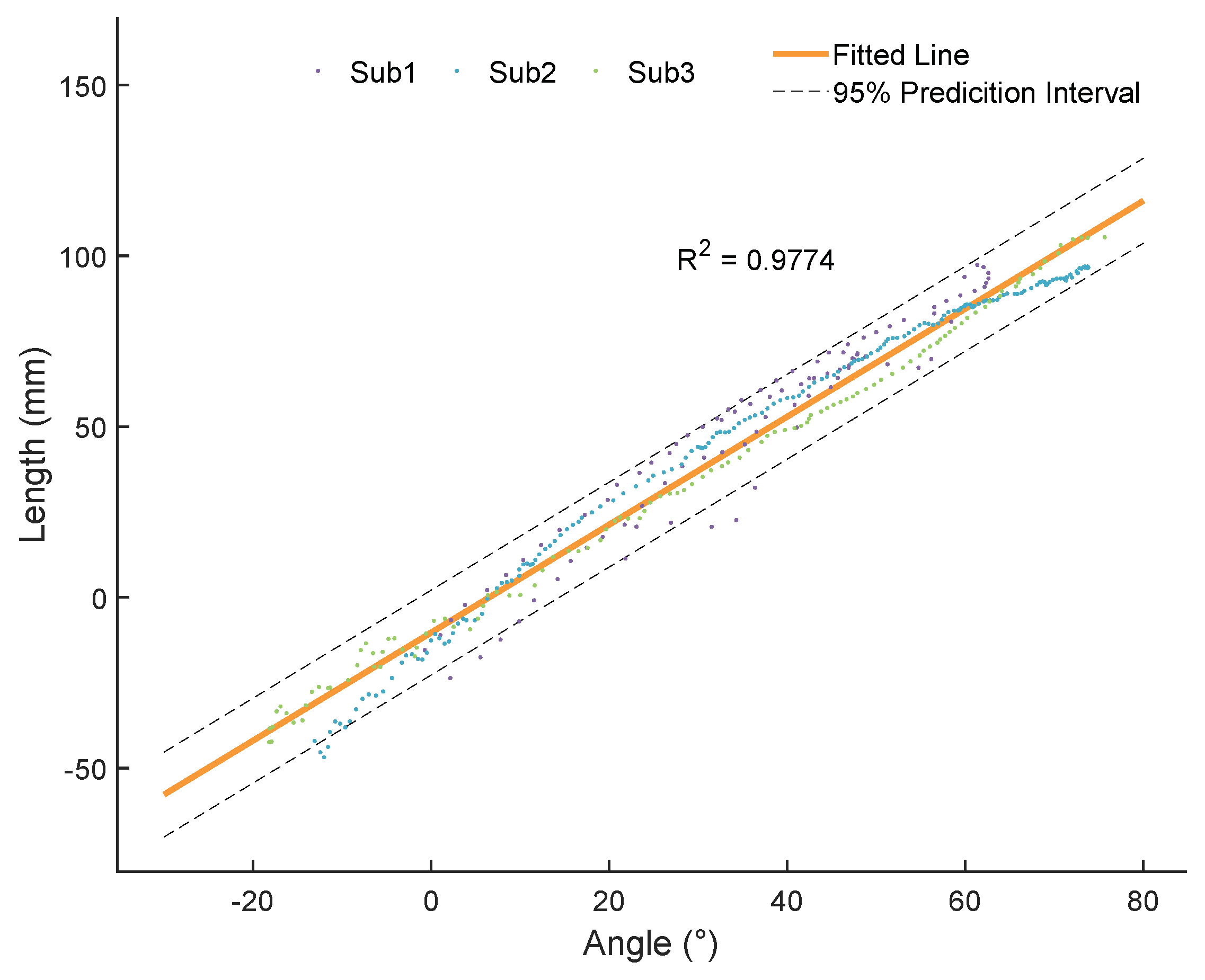
2.2. Stiffness Model
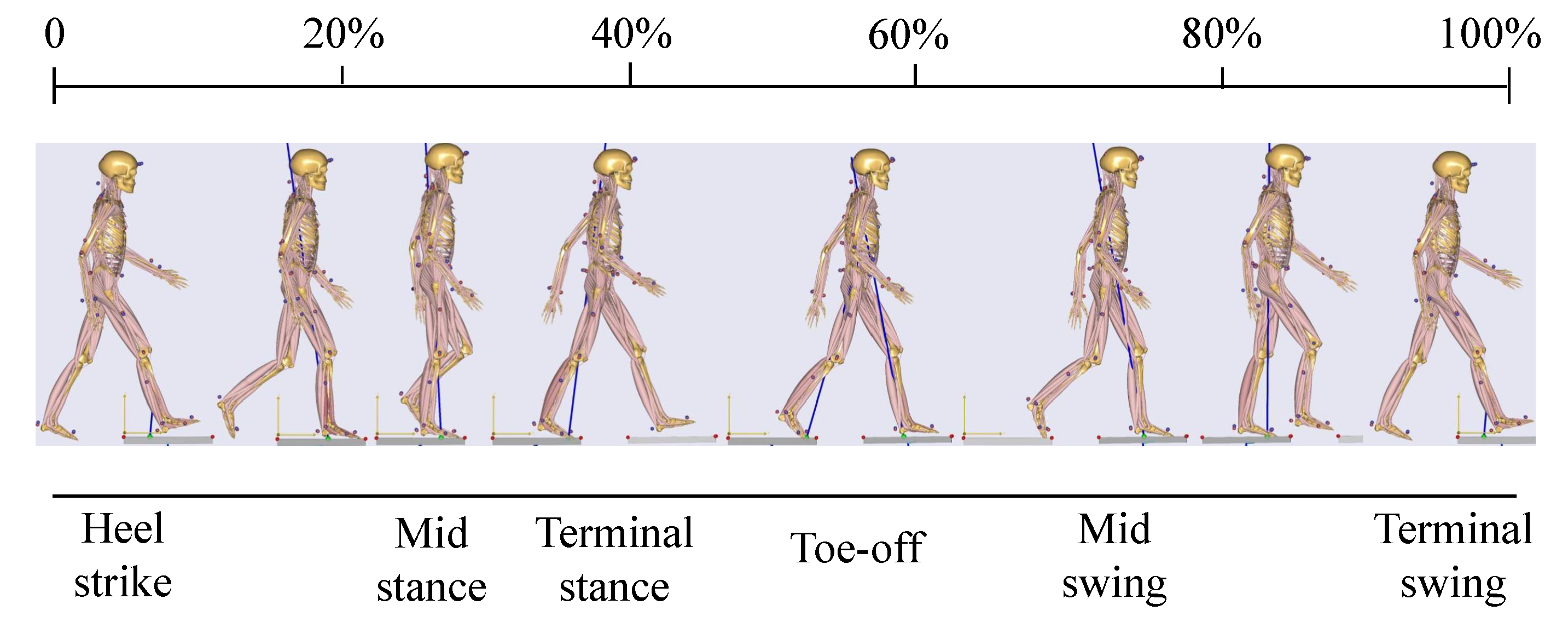
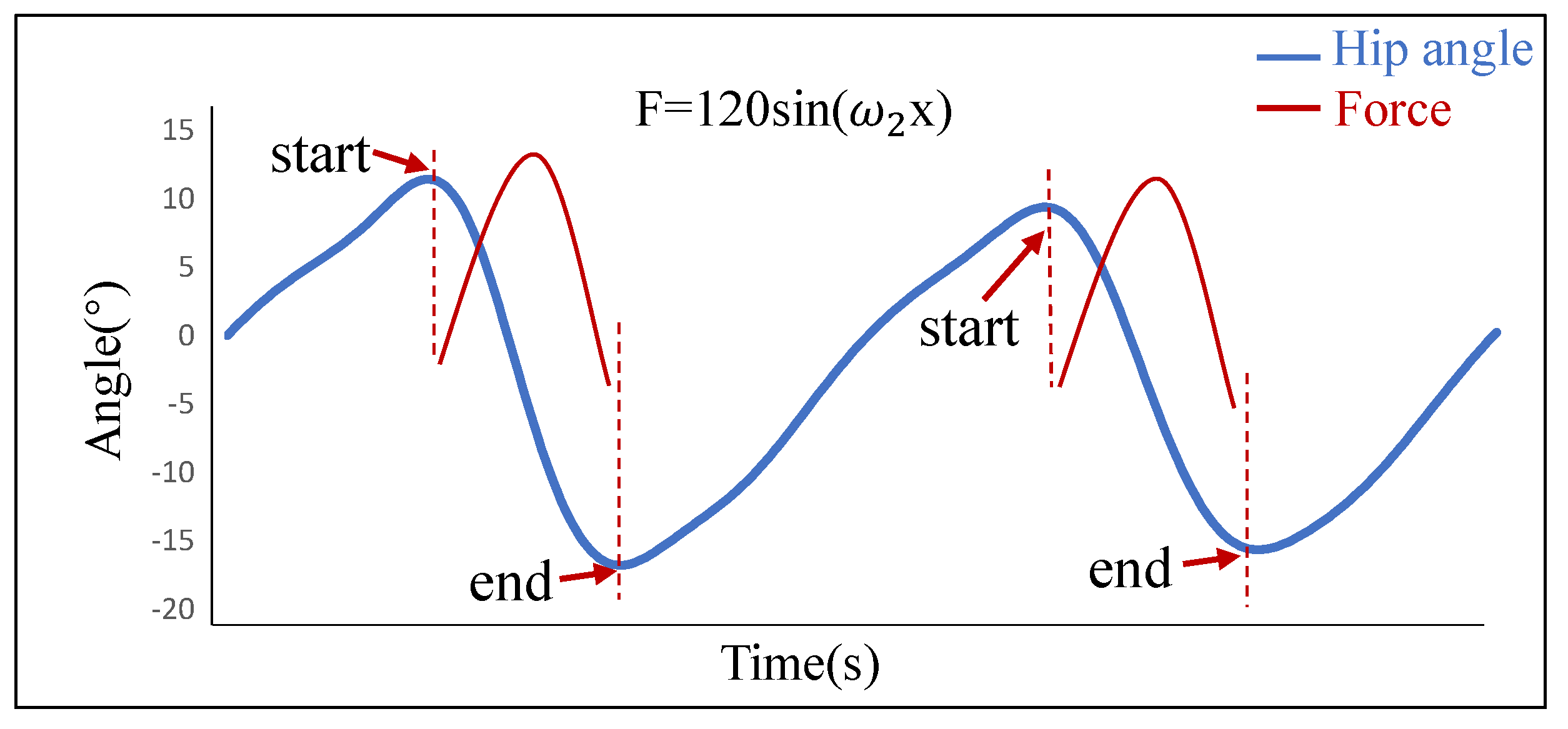
2.3. Human Gait Analysis
3. Control
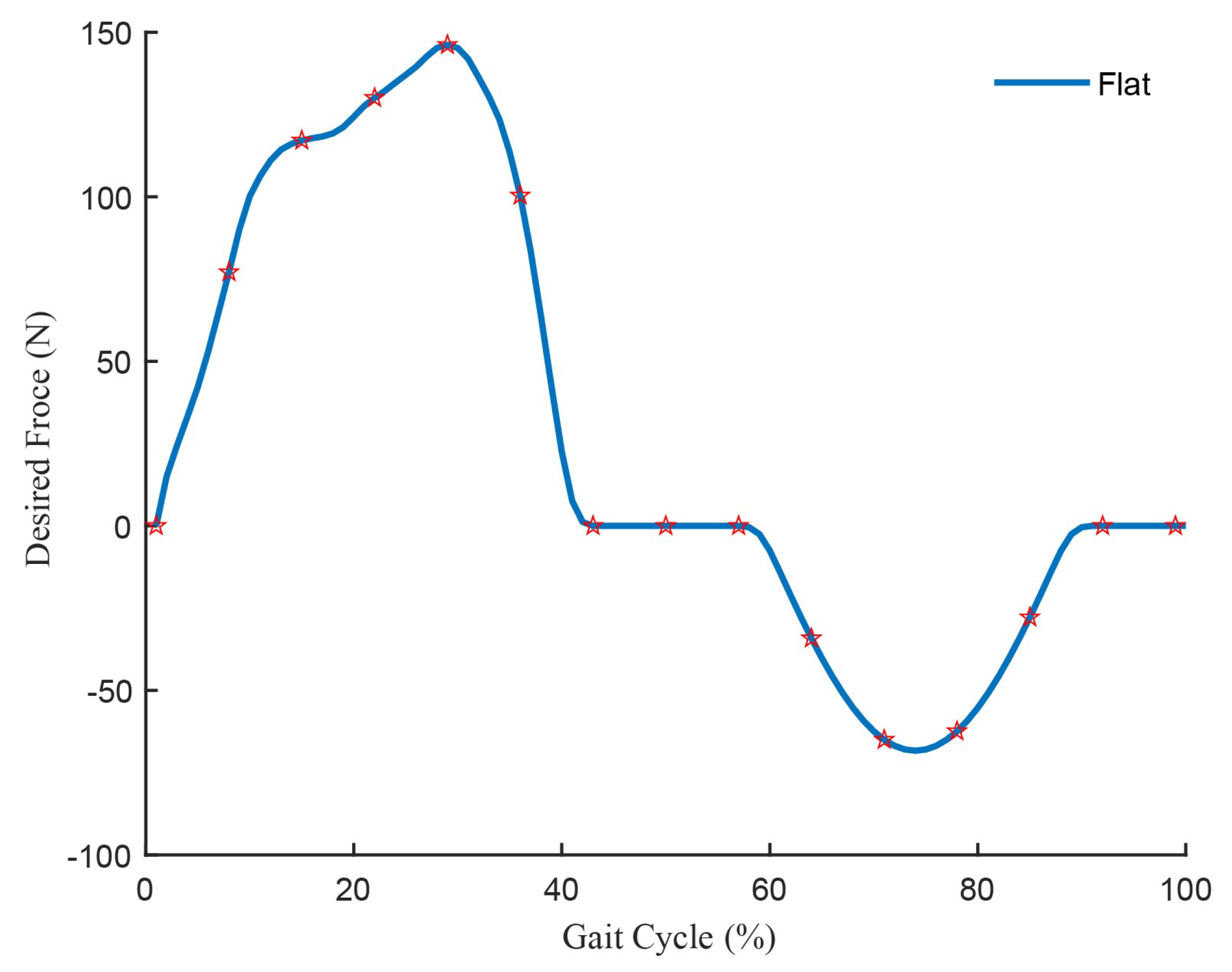
3.1. Assistance Force
3.2. Control Strategy
4. Evaluation Experiments
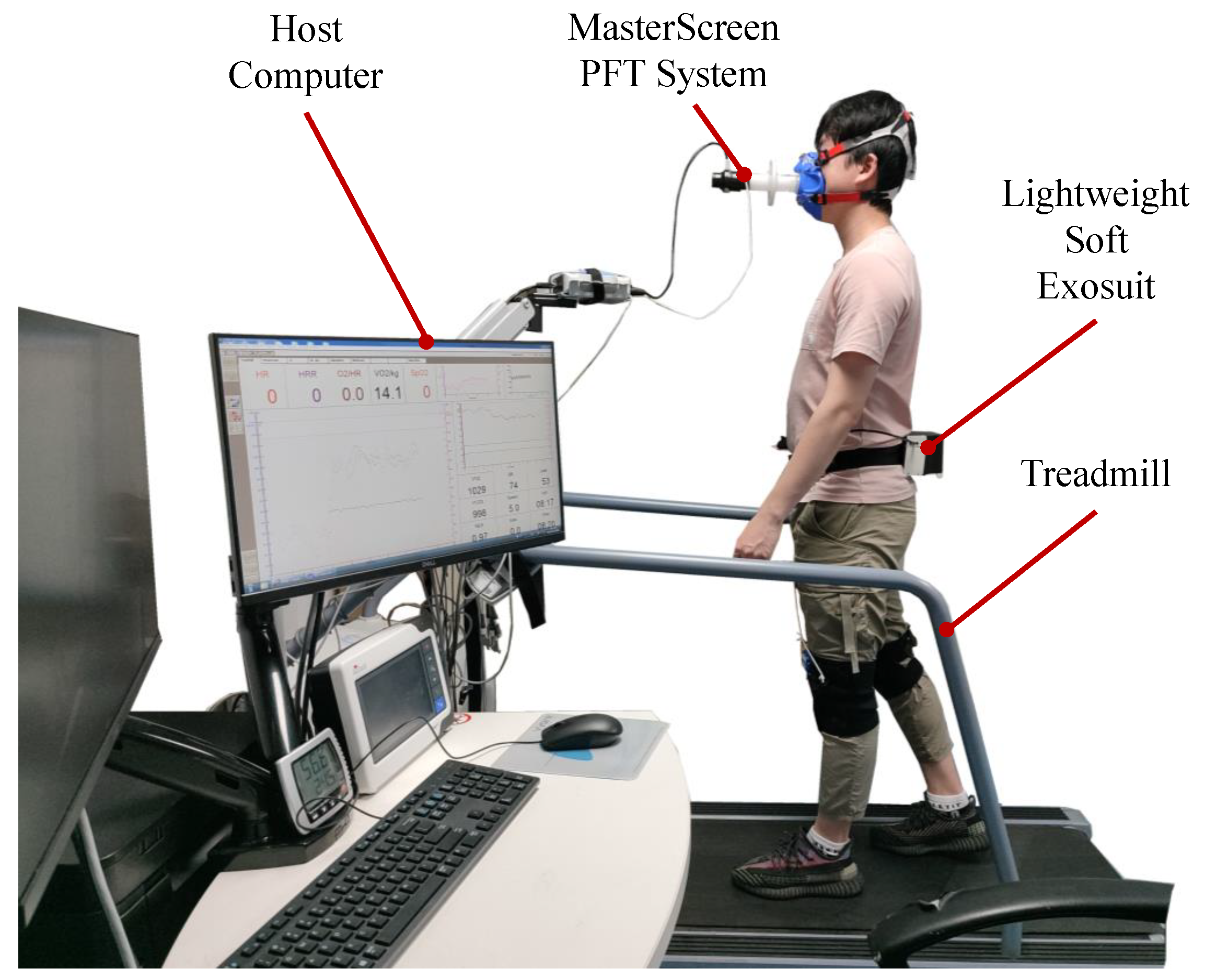
4.1. Experimental Setup and Protocol
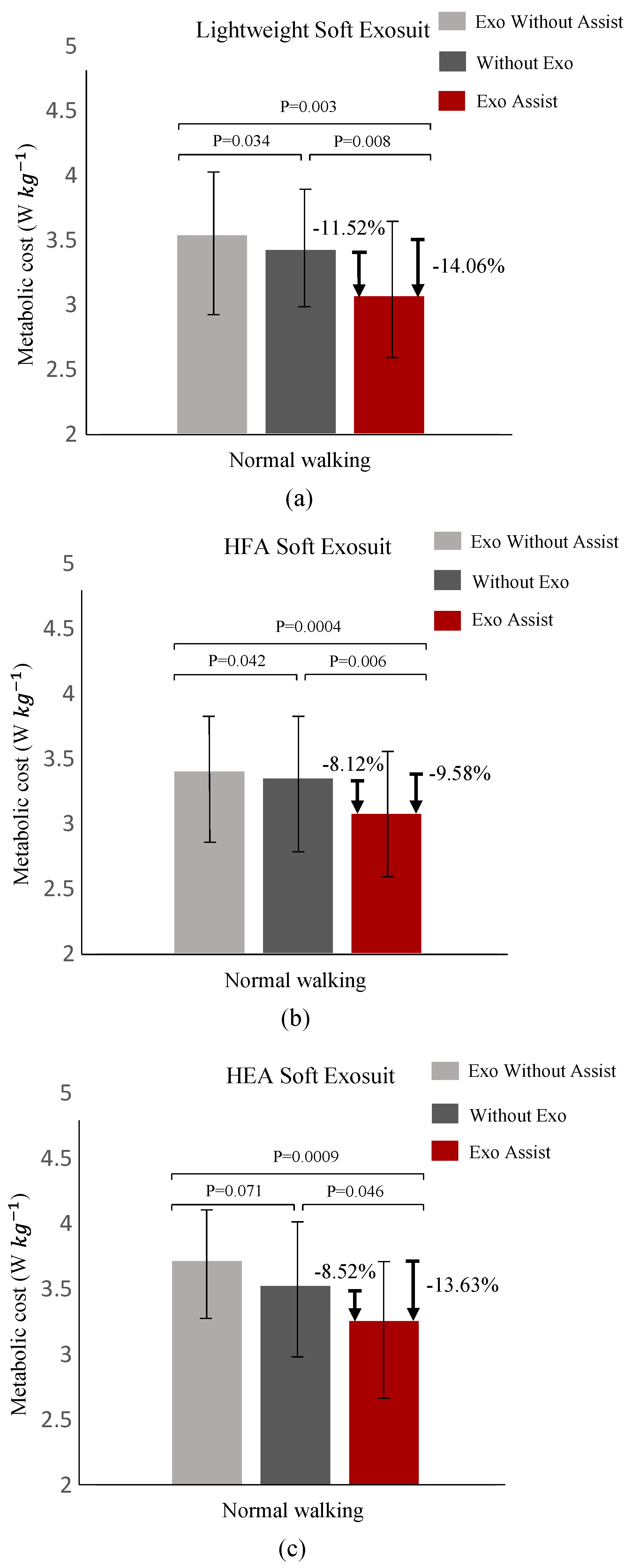
4.2. Metabolic Consumption Experiment
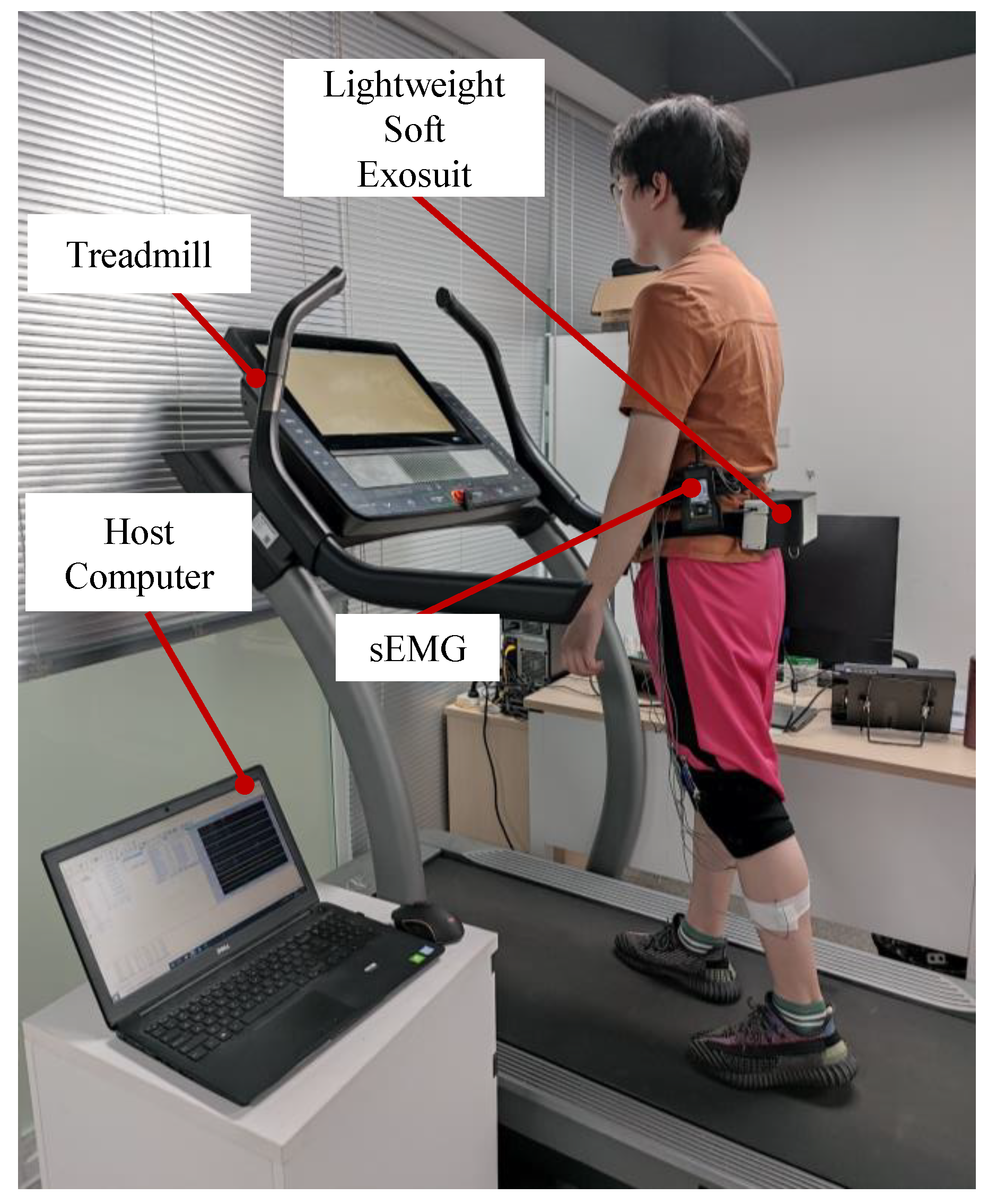
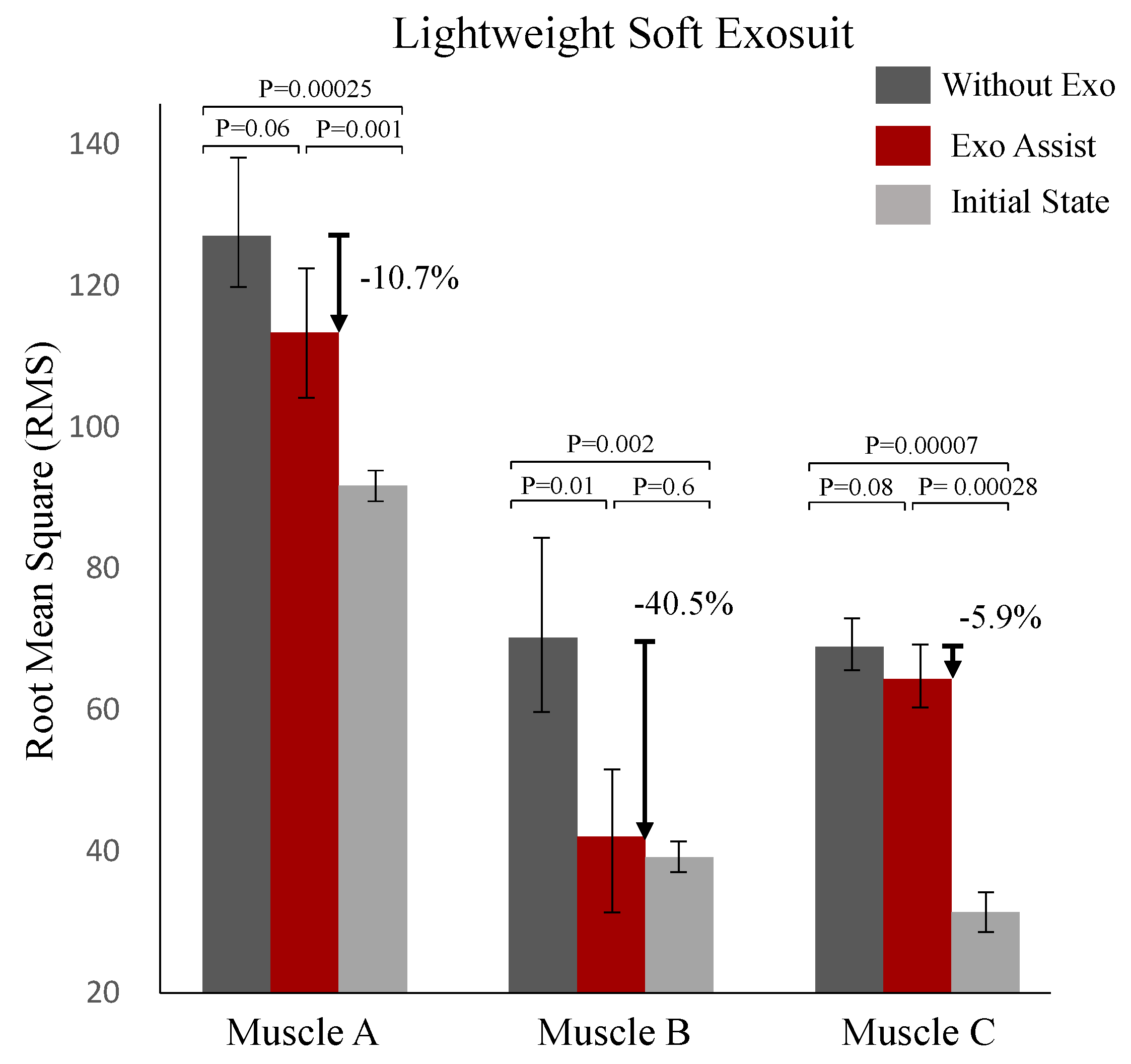
4.3. Muscle Fatigue Experiment
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| IMU | Inertial Measurement Unit |
| STM32 | STMicroelectronics 32-bit Series Microcontroller Chip |
| PD | Proportional-Derivative |
| HFA | Hip Flexion Assisted |
| HEA | Hip Extension Assisted |
| sEMG | Surface Electromyography |
| RMS | Root Mean Square |
References
- Tucker, M.; Novoseller, E.; Kann, C.; Sui, Y.; Yue, Y.; Burdick, J.W.; Ames, A.D. Preference-Based Learning for Exoskeleton Gait Optimization. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–15 June 2020; pp. 2351–2357. [Google Scholar] [CrossRef]
- Casper, J.; Murphy, R.R. Human-robot interactions during the robot-assisted urban search and rescue response at the world trade center. IEEE Trans. Syst. Man, Cybern. Part (Cybern.) 2003, 33, 367–385. [Google Scholar] [CrossRef] [Green Version]
- Matheson, E.; Minto, R.; Zampieri, E.G.; Faccio, M.; Rosati, G. Human–Robot Collaboration in Manufacturing Applications: A Review. Robotics 2019, 8, 100. [Google Scholar] [CrossRef] [Green Version]
- Sheridan, T.B. Human–robot interaction: Status and challenges. Hum. Factors 2016, 58, 525–532. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.X.; Xu, J.; Chen, C.; Long, X.; Tao, D.; Wu, X. Vision-Assisted Autonomous Lower-Limb Exoskeleton Robot. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 51, 3759–3770. [Google Scholar] [CrossRef]
- Zhong, B.; Cao, J.; McDaid, A.; Xie, S.Q.; Zhang, M. Synchronous Position and Compliance Regulation on a Bi-Joint Gait Exoskeleton Driven by Pneumatic Muscles. IEEE Trans. Autom. Sci. Eng. 2020, 17, 2162–2166. [Google Scholar] [CrossRef]
- Wu, X.; Yi, J.; Wang, C.; Chen, C. A Review on Human–Exoskeleton Coordination Towards Lower Limb Robotic Exoskeleton Systems. Int. J. Robot. Autom. 2019, 34, 431–451. [Google Scholar]
- Siviy, C.; Bae, J.; Baker, L.; Porciuncula, F.; Baker, T.; Ellis, T.D.; Awad, L.N.; Walsh, C.J. Offline assistance optimization of a soft exosuit for augmenting ankle power of stroke survivors during walking. IEEE Robot. Autom. Lett. 2020, 5, 828–835. [Google Scholar] [CrossRef]
- Awad, L.N.; Bae, J.; O’donnell, K.; De Rossi, S.M.; Hendron, K.; Sloot, L.H.; Kudzia, P.; Allen, S.; Holt, K.G.; Ellis, T.D.; et al. A soft robotic exosuit improves walking in patients after stroke. Sci. Transl. Med. 2017, 9. [Google Scholar] [CrossRef] [Green Version]
- Ding, Y.; Galiana, I.; Asbeck, A.T.; De Rossi, S.M.M.; Bae, J.; Santos, T.R.T.; De Araujo, V.L.; Lee, S.; Holt, K.G.; Walsh, C. Biomechanical and physiological evaluation of multi-joint assistance with soft exosuits. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 25, 119–130. [Google Scholar] [CrossRef]
- Asbeck, A.T.; De Rossi, S.M.; Holt, K.G.; Walsh, C.J. A biologically inspired soft exosuit for walking assistance. Int. J. Robot. Res. 2015, 34, 744–762. [Google Scholar] [CrossRef]
- Hu, H.; Fang, K.; Guan, H.; Wu, X.; Chen, C. A Novel Control Method of A Soft Exosuit with Plantar Pressure Sensors. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 3–5 July 2019; pp. 581–586. [Google Scholar]
- Collins, S.H.; Wiggin, M.B.; Sawicki, G.S. Reducing the energy cost of human walking using an unpowered exoskeleton. Nature 2015, 522, 212–215. [Google Scholar] [CrossRef] [Green Version]
- Shepertycky, M.; Burton, S.; Dickson, A.; Liu, Y.F.; Li, Q. Removing energy with an exoskeleton reduces the metabolic cost of walking. Science 2021, 372, 957–960. [Google Scholar] [CrossRef]
- Wehner, M.; Quinlivan, B.; Aubin, P.M.; Martinez-Villalpando, E.; Baumann, M.; Stirling, L.; Holt, K.; Wood, R.; Walsh, C. A lightweight soft exosuit for gait assistance. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation(ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 3362–3369. [Google Scholar] [CrossRef]
- Kim, J.; Lee, G.; Heimgartner, R.; Revi, D.A.; Karavas, N.; Nathanson, D.; Galiana, I.; Eckert-Erdheim, A.; Murphy, P.; Perry, D.; et al. Reducing the metabolic rate of walking and running with a versatile, portable exosuit. Science 2019, 365, 668–672. [Google Scholar] [CrossRef]
- Ding, Y.; Kim, M.; Kuindersma, S.; Walsh, C.J. Human-in-the-loop optimization of hip assistance with a soft exosuit during walking. Sci. Robot. 2018, 3, eaar5438. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, J.; Fiers, P.; Witte, K.A.; Jackson, R.W.; Poggensee, K.L.; Atkeson, C.G.; Collins, S.H. Human-in-the-loop optimization of exoskeleton assistance during walking. Science 2017, 356, 1280–1284. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kapsalyamov, A.; Jamwal, P.K.; Hussain, S.; Ghayesh, M.H. State of the art lower limb robotic exoskeletons for elderly assistance (June 2019). IEEE Access 2019, 7, 95075–95086. [Google Scholar] [CrossRef]
- Cao, W.; Chen, C.; Hu, H.; Fang, K.; Wu, X. Effect of Hip Assistance Modes on Metabolic Cost of Walking With a Soft Exoskeleton. IEEE Trans. Autom. Sci. Eng. 2020, 1–11. [Google Scholar] [CrossRef]
- Manti, M.; Cacucciolo, V.; Cianchetti, M. Stiffening in soft robotics: A review of the state of the art. IEEE Robot. Autom. Mag. 2016, 23, 93–106. [Google Scholar] [CrossRef]
- Wu, X.; Fang, K.; Chen, C.; Zhang, Y. Development of a lower limb multi-joint assistance soft exosuit. Sci. China Inf. Sci. 2020, 63, 1–3. [Google Scholar] [CrossRef]
- Ding, Y.; Galiana, I.; Siviy, C.; Panizzolo, F.A.; Walsh, C. IMU-based iterative control for hip extension assistance with a soft exosuit. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3501–3508. [Google Scholar]
- Grant, A.D. Gait Analysis: Normal and Pathological Function. Physiotherapy 2010, 97, 180. [Google Scholar] [CrossRef] [Green Version]
- Kwon, J.; Park, J.H.; Ku, S.; Jeong, Y.; Paik, N.J.; Park, Y.L. A soft wearable robotic ankle-foot-orthosis for post-stroke patients. IEEE Robot. Autom. Lett. 2019, 4, 2547–2552. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, X.; Zhang, Y.; Liu, Y.; Liu, Y.; Cao, W.; Chen, C. A New Portable Energy Harvesting Device Mounted on Shoes: Performance and Impact on Wearer. Energies 2020, 13, 3871. [Google Scholar] [CrossRef]
- Chaparro-Rico, B.D.; Cafolla, D. Test-Retest, Inter-Rater and Intra-Rater Reliability for Spatiotemporal Gait Parameters Using SANE (an eaSy gAit aNalysis systEm) as Measuring Instrument. Appl. Sci. 2020, 10, 5781. [Google Scholar] [CrossRef]
- Lee, J.; Seo, K.; Lim, B.; Jang, J.; Kim, K.; Choi, H. Effects of assistance timing on metabolic cost, assistance power, and gait parameters for a hip-type exoskeleton. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 498–504. [Google Scholar]
- Chen, C.; Zhang, Y.; Li, Y.; Wang, Z.; Wu, X. Iterative Learning Control for a Soft Exoskeleton with Hip and Knee Joint Assistance. Sensors 2020, 20, 4333. [Google Scholar] [CrossRef]
- Chaparro-Rico, B.; Cafolla, D.; Tortola, P.; Galardi, G. Assessing Stiffness, Joint Torque and ROM for Paretic and Non-Paretic Lower Limbs during the Subacute Phase of Stroke Using Lokomat Tools. Appl. Sci. 2020, 10, 6168. [Google Scholar] [CrossRef]
- Lee, G.; Ding, Y.; Bujanda, I.G.; Karavas, N.; Walsh, C.J. Improved assistive profile tracking of soft exosuits for walking and jogging with off-board actuation. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Zhou, Y.T.; Liu, G.Y.; Lai, X.W. Applications of simulated annealing-immune particle swarm optimization in emotion recognition of galvanic skin response signal. Transducer Microsyst. Technol. 2009, 173, 47. [Google Scholar]
- Brockway, J.M. Derivation of formulae used to calculate energy expenditure in man. Hum. Nutr. Clin. Nutr. 1987, 41, 463–471. [Google Scholar]
- Fulco, C.S.; Lewis, S.F.; Frykman, P.N.; Boushel, R.; Smith, S.; Harman, E.A.; Cymerman, A.; Pandolf, K.B. Muscle fatigue and exhaustion during dynamic leg exercise in normoxia and hypobaric hypoxia. J. Appl. Physiol. 1996, 81, 1891–1900. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Wu, X.; Zhang, Y.; Chen, C.; Ma, Y. A Semi-active Exoskeleton Based on EMGs Reduces Muscle Fatigue When Squatting. Front. Neurorobotics 2021, 15, 625479. [Google Scholar] [CrossRef]
- Jin, S.; Iwamoto, N.; Hashimoto, K.; Yamamoto, M. Experimental evaluation of energy efficiency for a soft wearable robotic suit. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 25, 1192–1201. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Karavas, N.; Quinlivan, B.T.; LouiseRyan, D.; Perry, D.; Eckert-Erdheim, A.; Murphy, P.; Goldy, T.G.; Menard, N.; Athanassiu, M.; et al. Autonomous multi-joint soft exosuit for assistance with walking overground. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 2812–2819. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Mass(kg) | Location |
|---|---|---|
| Waist belt | 0.29 | Waist |
| Actuator | 0.214 | Waist |
| Batteries | 0.53 | Waist |
| MCU | 0.08 | Waist |
| IMUs | 0.024 | Thigh |
| Wraps | 0.22 | Thigh |
| Load cells | 0.05 | Thigh |
| Other component | 0.392 | Waist |
| Subjects | Gender | Height (cm) | Weight (kg) | Age (Years Old) |
|---|---|---|---|---|
| A | Male | 182 | 75 | 25 |
| B | Male | 165 | 61 | 21 |
| C | Female | 160 | 45 | 25 |
| D | Male | 176 | 68 | 24 |
| E | Male | 165 | 58 | 24 |
| F | Male | 185 | 102 | 21 |
| Research | Assistance Mode | Weight (kg) | Power | Net Metabolic Cost (%) |
|---|---|---|---|---|
| Kim et al. [16] | Hip extension | 5.004 | Powerd | 9.3 |
| Jim et al. [36] | Hip flexion | ∖ | Powerd | 5.9 |
| Sangjun et al. [37] | Hip extension and flexion and Ankle plantar flexion | 5.1 | Powerd | 16.93 |
| Ding et al. [10] | Hip extension and flexion and Ankle plantar flexion | ∖ | Physiological | 14.6 |
| Collins et al. [13] | Ankle plantar flexion | 0.816–1.006 | Unpowered | 7.2 ± 2.6 |
| This work | Hip extension | 1.8 | Powered | 14.06 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Chen, C.; Wang, Z.; Ye, X.; Liu, Y.; Wu, X. A Novel Lightweight Wearable Soft Exosuit for Reducing the Metabolic Rate and Muscle Fatigue. Biosensors 2021, 11, 215. https://doi.org/10.3390/bios11070215
Chen L, Chen C, Wang Z, Ye X, Liu Y, Wu X. A Novel Lightweight Wearable Soft Exosuit for Reducing the Metabolic Rate and Muscle Fatigue. Biosensors. 2021; 11(7):215. https://doi.org/10.3390/bios11070215
Chicago/Turabian StyleChen, Lingxing, Chunjie Chen, Zhuo Wang, Xin Ye, Yida Liu, and Xinyu Wu. 2021. "A Novel Lightweight Wearable Soft Exosuit for Reducing the Metabolic Rate and Muscle Fatigue" Biosensors 11, no. 7: 215. https://doi.org/10.3390/bios11070215
APA StyleChen, L., Chen, C., Wang, Z., Ye, X., Liu, Y., & Wu, X. (2021). A Novel Lightweight Wearable Soft Exosuit for Reducing the Metabolic Rate and Muscle Fatigue. Biosensors, 11(7), 215. https://doi.org/10.3390/bios11070215