Design and Optimisation of Elliptical-Shaped Planar Hall Sensor for Biomedical Applications

 , ,
, , 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Physical Background
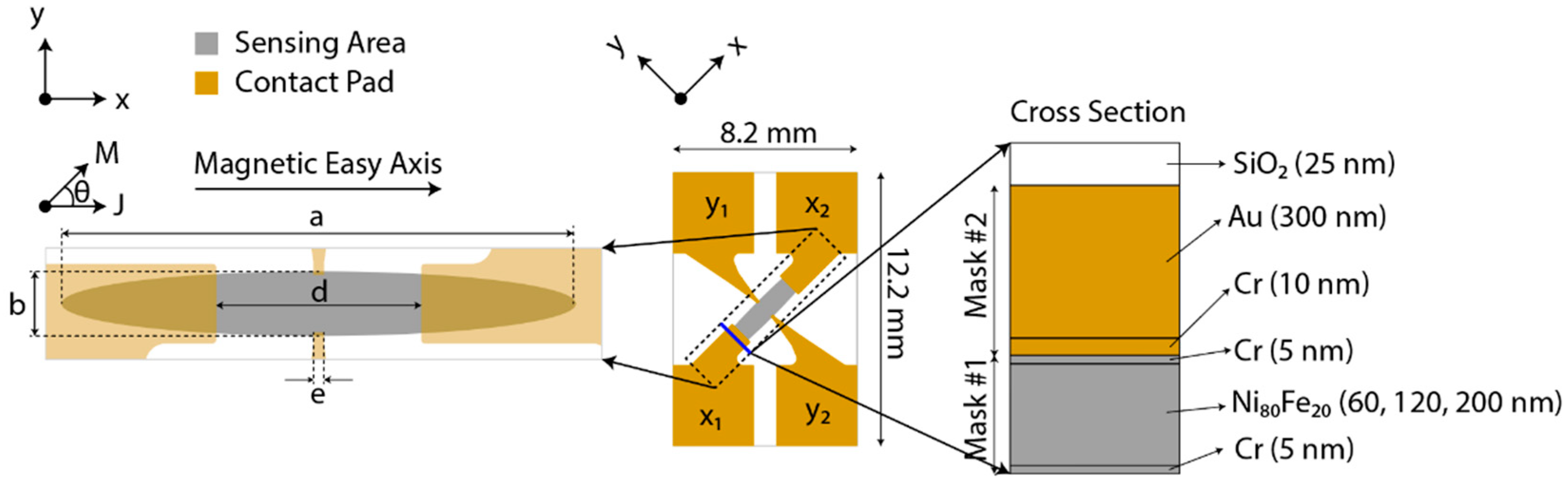
2.2. Design and Microfabrication
2.3. Experimental Setup and Measurement
3. Results
3.1. Magnetic Behaviour
3.2. Sensitivity and Dynamic Range
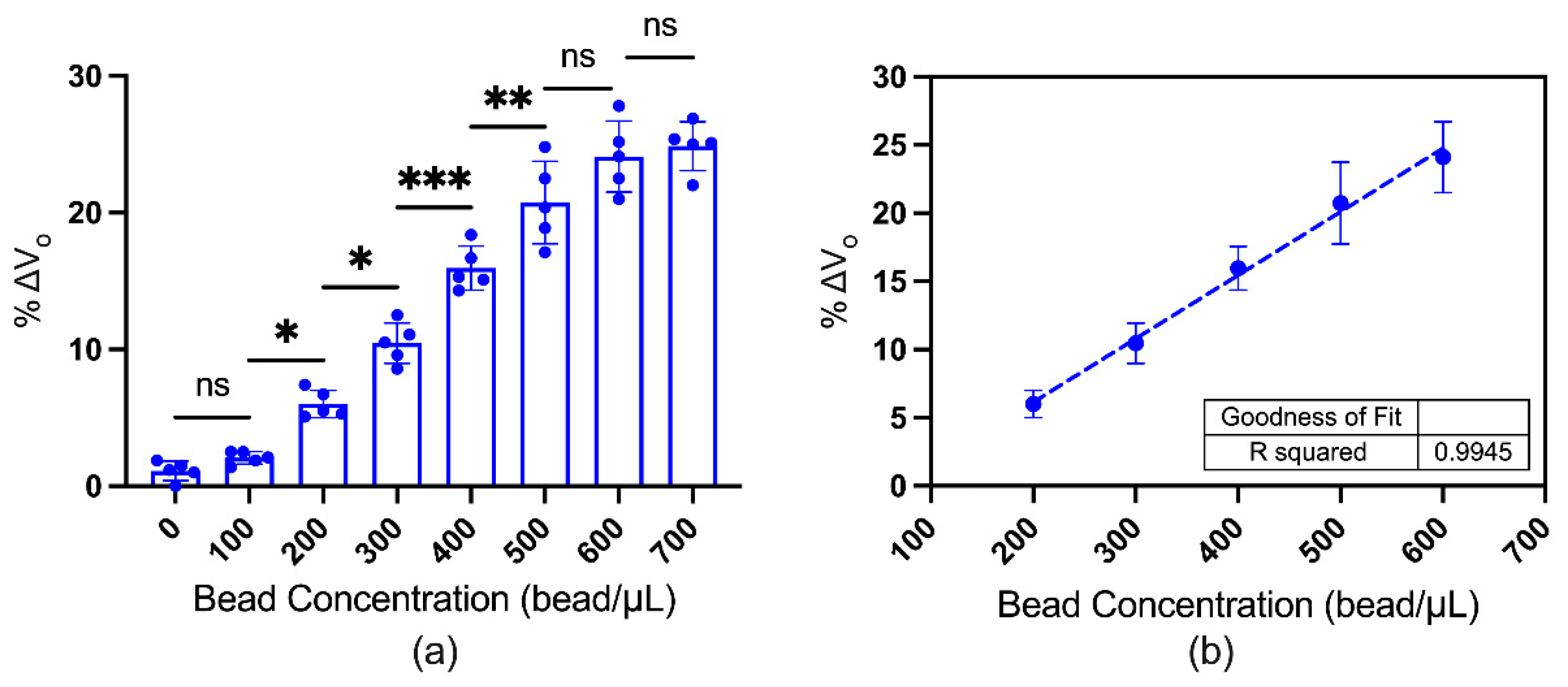
3.3. Magnetic Beads Quantification
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Microfabrication
- On polished glass substrate (thickness 0.5 mm), Cr (5 nm)/Ni80Fe20 (60 nm, 120 nm, and 200 nm)/Cr (5 nm) was deposited using electron-beam physical vapor deposition (EBPVD) technique (Equipment: Intlvac Nanochrome II, Intlvac Inc, Georgetown, Canada) at 4 × 10−6–8 × 10−6 T chamber pressure with a rate of 0.3 Å/s, 2.0 Å/s, and 0.3 Å/s, respectively.
- The elliptical feature was patterned with the 3.5 µm thick negative photoresist (product id: AZ nLOF 2035, Microchemicals GmbH, Nicolaus-Otto-Straße 39, Germany) using the photolithography process. The process involves mainly two equipment, i.e., mask aligner (model: EVG 620, EV Group, DI-Erich-Thallner-Straße 1, Austria) and spin coater (model: Suss Delta 80). The process included hexamethyldisilazane (HDMS) (manufacturer: Microchemicals GmbH, Nicolaus-Otto-Straße 39, Germany) coating at 3000 rpm followed by immediate softbake at 110 °C for 90 s, photoresist coating at 3000 rpm followed by immediate softbake at 110 °C for 120 s, UV exposure at 100 mJ/cm2 dose with the photomask #1, post-exposure bake at 110 °C for 90 s, and pattern development with the developer solution (product id: AZ726, Microchemicals GmbH, Nicolaus-Otto-Straße 39, Germany) for 45 s. The photomasks were produced by the ‘Melbourne Centre for Nanofabrication’.
- The wet etching process was conducted in two steps. First, the wafer was etched with 33% hydrochloric acid at 50 °C for 10–20 s until the film’s unwanted section turns into black colour. Second, the wafer was etched with chromium etchant at 21 °C for 10–20 s to slow down the process and reveal the elliptical feature.
- The contact pad feature was patterned with the 1.5 µm thick positive photoresist (product id: AZ1512HS, Microchemicals GmbH, Nicolaus-Otto-Straße 39, Germany) using the photolithography process. The process included HDMS coating at 3000 rpm followed by immediate softbake at 110 °C for 90 s, photoresist coating at 3000 rpm followed by immediate softbake at 110 °C for 90 s, UV exposure at 90 mJ/cm2 dose with the photomask #2, and pattern development with the developer solution (product id: AZ726, Microchemicals GmbH, Nicolaus-Otto-Straße 39, Germany) diluted with water (3 developer: 2 water) for 60 s.
- Cr (10 nm)/Au (300 nm) was deposited using the EBPVD deposition technique at 4 × 10−6–8 × 10−6 T chamber pressure with a rate of 0.3 Å/s and 2.0 Å/s, respectively.
- The lift-off process was conducted by ultrasonic cleaning in acetone two times, followed by IPA wash.
- SiO2 (25 nm) was deposited using the EBPVD deposition technique at 4 × 10−6–8 × 10−6 T chamber pressure with a rate of 0.1 Å/s.
- The wafer was coated with the AZ1512HS photoresist at 3000 rpm before dicing into single sensors.

Appendix A.2. Helmholtz Coil

Appendix A.3. Sensor Holder

Appendix A.4. Limitation of the Permalloy Thickness

References
- Tamanaha, C.R.; Mulvaney, S.P.; Rife, J.C. Evolution of a magnetic-based biomolecular detection system. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 5425–5427. [Google Scholar]
- Tamanaha, C.R.; Mulvaney, S.P.; Rife, J.C.; Whitman, L.J. Magnetic labeling, detection, and system integration. Biosens. Bioelectron. 2008, 24, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Tamayo, J.; Kosaka, P.M.; Ruz, J.J.; San Paulo, Á.; Calleja, M. Biosensors based on nanomechanical systems. Chem. Soc. Rev. 2013, 42, 1287–1311. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lai, L.M.; Goon, I.Y.; Chuah, K.; Lim, M.; Braet, F.; Amal, R.; Gooding, J.J. The biochemiresistor: An ultrasensitive biosensor for small organic molecules. Angew. Chem. Int. Ed. 2012, 51, 6456–6459. [Google Scholar] [CrossRef] [PubMed]
- Xianyu, Y.; Wang, Q.; Chen, Y. Magnetic particles-enabled biosensors for point-of-care testing. TrAC Trends Anal. Chem. 2018, 106, 213–224. [Google Scholar] [CrossRef]
- Chen, Y.-T.; Kolhatkar, A.G.; Zenasni, O.; Xu, S.; Lee, T.R. Biosensing using magnetic particle detection techniques. Sensors 2017, 17, 2300. [Google Scholar] [CrossRef] [PubMed]
- Sayad, A.; Skafidas, E.; Kwan, P. Magneto-Impedance Biosensor Sensitivity: Effect and Enhancement. Sensors 2020, 20, 5213. [Google Scholar] [CrossRef] [PubMed]
- Rife, J.; Miller, M.; Sheehan, P.; Tamanaha, C.; Tondra, M.; Whitman, L. Design and performance of GMR sensors for the detection of magnetic microbeads in biosensors. Sens. Actuators A Phys. 2003, 107, 209–218. [Google Scholar] [CrossRef]
- Cardoso, S.; Leitao, D.; Dias, T.; Valadeiro, J.; Silva, M.; Chicharo, A.; Silverio, V.; Gaspar, J.; Freitas, P. Challenges and trends in magnetic sensor integration with microfluidics for biomedical applications. J. Phys. D Appl. Phys. 2017, 50, 213001. [Google Scholar] [CrossRef]
- Lin, G.; Makarov, D.; Schmidt, O.G. Magnetic sensing platform technologies for biomedical applications. Lab A Chip 2017, 17, 1884–1912. [Google Scholar] [CrossRef]
- Zheng, C.; Zhu, K.; De Freitas, S.C.; Chang, J.-Y.; Davies, J.E.; Eames, P.; Freitas, P.P.; Kazakova, O.; Kim, C.; Leung, C.-W. Magnetoresistive sensor development roadmap (non-recording applications). IEEE Trans. Magn. 2019, 55, 1–30. [Google Scholar] [CrossRef] [Green Version]
- Baselt, D.R.; Lee, G.U.; Natesan, M.; Metzger, S.W.; Sheehan, P.E.; Colton, R.J. A biosensor based on magnetoresistance technology. Biosens. Bioelectron. 1998, 13, 731–739. [Google Scholar] [CrossRef]
- Xu, L.; Yu, H.; Akhras, M.S.; Han, S.-J.; Osterfeld, S.; White, R.L.; Pourmand, N.; Wang, S.X. Giant magnetoresistive biochip for DNA detection and HPV genotyping. Biosens. Bioelectron. 2008, 24, 99–103. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Klein, T.; Wang, W.; Yu, L.; Wu, K.; Boylan, K.L.; Vogel, R.I.; Skubitz, A.P.; Wang, J.-P. Development of a multiplexed giant magnetoresistive biosensor array prototype to quantify ovarian cancer biomarkers. Biosens. Bioelectron. 2019, 126, 301–307. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Zhou, Y.; Lei, C.; Luo, J.; Xie, S.; Pu, H. Magnetic impedance biosensor: A review. Biosens. Bioelectron. 2017, 90, 418–435. [Google Scholar] [CrossRef] [PubMed]
- Sayad, A.; Uddin, S.M.; Chan, J.; Skafidas, E.; Kwan, P. Meander Thin-Film Biosensor Fabrication to Investigate the Influence of Structural Parameters on the Magneto-Impedance Effect. Sensors 2021, 21, 6514. [Google Scholar] [CrossRef] [PubMed]
- Mor, V.; Grosz, A.; Klein, L. Planar Hall effect (PHE) magnetometers. In High Sensitivity Magnetometers; Springer: Berlin, Germany, 2017; pp. 201–224. [Google Scholar]
- Thomson, W. XIX. On the electro-dynamic qualities of metals:—Effects of magnetization on the electric conductivity of nickel and of iron. Proc. R. Soc. Lond. 1857, 8, 546–550. [Google Scholar]
- Hung, T.Q.; Terki, F.; Kamara, S.; Kim, K.; Charar, S.; Kim, C. Planar Hall ring sensor for ultra-low magnetic moment sensing. J. Appl. Phys. 2015, 117, 154505. [Google Scholar] [CrossRef]
- Freitas, P.; Ferreira, H.; Graham, D.; Clarke, L.; Amaral, M.; Martins, V.; Fonseca, L.; Cabral, J. Magnetoresistive DNA chips. In Magnetoelectronics; Elsevier: Amsterdam, The Netherlands, 2004; pp. 331–386. [Google Scholar]
- Grosz, A.; Mor, V.; Amrusi, S.; Faivinov, I.; Paperno, E.; Klein, L. A high-resolution planar Hall effect magnetometer for ultra-low frequencies. IEEE Sens. J. 2016, 16, 3224–3230. [Google Scholar] [CrossRef]
- Grosz, A.; Mor, V.; Paperno, E.; Amrusi, S.; Faivinov, I.; Schultz, M.; Klein, L. Planar hall effect sensors with subnanotesla resolution. IEEE Magn. Lett. 2013, 4, 6500104. [Google Scholar] [CrossRef]
- Elzwawy, A.; Talantsev, A.; Kim, C. Free and forced Barkhausen noises in magnetic thin film based cross-junctions. J. Magn. Magn. Mater. 2018, 458, 292–300. [Google Scholar] [CrossRef]
- Henriksen, A.; Dalslet, B.T.; Skieller, D.; Lee, K.; Okkels, F.; Hansen, M.F. Planar Hall effect bridge magnetic field sensors. Appl. Phys. Lett. 2010, 97, 013507. [Google Scholar] [CrossRef]
- Persson, A.; Bejhed, R.S.; Østerberg, F.W.; Gunnarsson, K.; Nguyen, H.; Rizzi, G.; Hansen, M.F.; Svedlindh, P. Modelling and design of planar Hall effect bridge sensors for low-frequency applications. Sens. Actuators A Phys. 2013, 189, 459–465. [Google Scholar] [CrossRef] [Green Version]
- Østerberg, F.W.; Rizzi, G.; Hansen, M.F. On-chip measurements of Brownian relaxation of magnetic beads with diameters from 10 nm to 250 nm. J. Appl. Phys. 2013, 113, 154507. [Google Scholar] [CrossRef]
- Persson, A.; Bejhed, R.S.; Nguyen, H.; Gunnarsson, K.; Dalslet, B.T.; Oesterberg, F.W.; Hansen, M.F.; Svedlindh, P. Low-frequency noise in planar Hall effect bridge sensors. Sens. Actuators A Phys. 2011, 171, 212–218. [Google Scholar] [CrossRef] [Green Version]
- Oh, S.; Le, T.T.; Kim, G.; Kim, C. Size effect on NiFe/Cu/NiFe/IrMn spin-valve structure for an array of PHR sensor element. Phys. Status Solidi (A) 2007, 204, 4075–4078. [Google Scholar] [CrossRef]
- Thanh, N.; Kim, K.; Kim, C.; Shin, K.; Kim, C. Microbeads detection using Planar Hall effect in spin-valve structure. J. Magn. Magn. Mater. 2007, 316, e238–e241. [Google Scholar] [CrossRef]
- Oh, S.; Baek, N.S.; Jung, S.-D.; Chung, M.; Hung, T.Q.; Anandakumar, S.; Sudha Rani, V.; Jeong, J.-R.; Kim, C. Selective binding and detection of magnetic labels using PHR sensor via photoresist micro-wells. J. Nanosci. Nanotechnol. 2011, 11, 4452–4456. [Google Scholar] [CrossRef]
- Østerberg, F.W.; Rizzi, G.; de la Torre, T.Z.G.; Strömberg, M.; Strømme, M.; Svedlindh, P.; Hansen, M. Measurements of Brownian relaxation of magnetic nanobeads using planar Hall effect bridge sensors. Biosens. Bioelectron. 2013, 40, 147–152. [Google Scholar] [CrossRef]
- Qejvanaj, F.; Zubair, M.; Persson, A.; Mohseni, S.; Fallahi, V.; Sani, S.R.; Chung, S.; Le, T.; Magnusson, F.; Åkerman, J. Thick double-biased IrMn/NiFe/IrMn planar hall effect bridge sensors. IEEE Trans. Magn. 2014, 50, 4006104. [Google Scholar] [CrossRef]
- Østerberg, F.W.; Henriksen, A.D.; Rizzi, G.; Hansen, M.F. Comment on “Planar Hall resistance ring sensor based on NiFe/Cu/IrMn trilayer structure” [J. Appl. Phys. 113, 063903 (2013)]. J. Appl. Phys. 2013, 114, 106101. [Google Scholar] [CrossRef] [Green Version]
- Sinha, B.; Quang Hung, T.; Sri Ramulu, T.; Oh, S.; Kim, K.; Kim, D.-Y.; Terki, F.; Kim, C. Planar Hall resistance ring sensor based on NiFe/Cu/IrMn trilayer structure. J. Appl. Phys. 2013, 113, 063903. [Google Scholar] [CrossRef]
- Genish, I.; Shperber, Y.; Naftalis, N.; Salitra, G.; Aurbach, D.; Klein, L. The effects of geometry on magnetic response of elliptical PHE sensors. J. Appl. Phys. 2010, 107, 09E716. [Google Scholar] [CrossRef]
- Mor, V.; Schultz, M.; Sinwani, O.; Grosz, A.; Paperno, E.; Klein, L. Planar Hall effect sensors with shape-induced effective single domain behavior. J. Appl. Phys. 2012, 111, 07E519. [Google Scholar] [CrossRef]
- Nhalil, H.; Givon, T.; Das, P.T.; Hasidim, N.; Mor, V.; Schultz, M.; Amrusi, S.; Klein, L.; Grosz, A. Planar Hall effect magnetometer with 5 pT resolution. IEEE Sens. Lett. 2019, 3, 2501904. [Google Scholar] [CrossRef]
- Nhalil, H.; Das, P.T.; Schultz, M.; Amrusi, S.; Grosz, A.; Klein, L. Thickness dependence of elliptical planar Hall effect magnetometers. Appl. Phys. Letters. 2020, 117, 262403. [Google Scholar] [CrossRef]
- Valadeiro, J.; Leitao, D.; Cardoso, S.; Freitas, P. Improved efficiency of tapered magnetic flux concentrators with double-layer architecture. IEEE Trans. Magn. 2017, 53, 4003805. [Google Scholar] [CrossRef]
- Roy, A.; Kumar, P.A. Giant planar Hall effect in pulsed laser deposited permalloy films. J. Phys. D Appl. Phys. 2010, 43, 365001. [Google Scholar] [CrossRef]
- Marinace, J.C. High Sensitivity Hall Effect Probe. Google Patents US3202913A, 29 May 1961. [Google Scholar]
- MagnaBioSciences. Available online: http://www.magnabiosciences.com (accessed on 14 June 2021).
- Rizzi, G.; Østerberg, F.W.; Henriksen, A.D.; Dufva, M.; Hansen, M.F. On-chip magnetic bead-based DNA melting curve analysis using a magnetoresistive sensor. J. Magn. Magn. Mater. 2015, 380, 215–220. [Google Scholar] [CrossRef]
- Dias, T.; Cardoso, F.; Martins, S.; Martins, V.; Cardoso, S.; Gaspar, J.; Monteiro, G.; Freitas, P. Implementing a strategy for on-chip detection of cell-free DNA fragments using GMR sensors: A translational application in cancer diagnostics using ALU elements. Anal. Methods 2016, 8, 119–128. [Google Scholar] [CrossRef]
- Cousins, A.; Balalis, G.; Thompson, S.K.; Morales, D.F.; Mohtar, A.; Wedding, A.; Thierry, B. Novel handheld magnetometer probe based on magnetic tunnelling junction sensors for intraoperative sentinel lymph node identification. Sci. Rep. 2015, 5, 10842. [Google Scholar] [CrossRef] [Green Version]
- Sharma, P.P.; Albisetti, E.; Massetti, M.; Scolari, M.; La Torre, C.; Monticelli, M.; Leone, M.; Damin, F.; Gervasoni, G.; Ferrari, G. Integrated platform for detecting pathogenic DNA via magnetic tunneling junction-based biosensors. Sens. Actuators B. Chem. 2017, 242, 280–287. [Google Scholar] [CrossRef] [Green Version]
- Lei, H.; Wang, K.; Ji, X.; Cui, D. Contactless measurement of magnetic nanoparticles on lateral flow strips using tunneling magnetoresistance (TMR) sensors in differential configuration. Sensors 2016, 16, 2130. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rabehi, A.; Garlan, B.; Achtsnicht, S.; Krause, H.-J.; Offenhäusser, A.; Ngo, K.; Neveu, S.; Graff-Dubois, S.; Kokabi, H. Magnetic detection structure for lab-on-chip applications based on the frequency mixing technique. Sensors 2018, 18, 1747. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jen, S.; Wang, P.; Tseng, Y.; Chiang, H.-P. Planar Hall effect of Permalloy films on Si (111), Si (100), and glass substrates. J. Appl. Phys. 2009, 105, 07E903. [Google Scholar] [CrossRef]
- Montaigne, F.; Schuhl, A.; Van Dau, F.N.; Encinas, A. Development of magnetoresistive sensors based on planar Hall effect for applications to microcompass. Sens. Actuators A Phys. 2000, 81, 324–327. [Google Scholar] [CrossRef]
- Ko, T.; Park, B.; Lee, J.; Rhie, K.; Kim, M.; Rhee, J. Planar Hall effect of glass/Fe70 Å/[Co21 Å/Cu25 Å] 20 multilayers. J. Magn. Magn. Mater. 1999, 198, 64–66. [Google Scholar] [CrossRef]
- Adeyeye, A.; Win, M.; Tan, T.; Chong, G.; Ng, V.; Low, T. Planar Hall effect and magnetoresistance in Co/Cu multilayer films. Sens. Actuators A Phys. 2004, 116, 95–102. [Google Scholar] [CrossRef]
- Chang, Y.; Chang, C.; Wu, J.-C.; Wei, Z.; Lai, M.; Chang, C. Probing the magnetization reversal of microstructured permalloy cross by planar hall measurement and magnetic force microscopy. IEEE Trans. Magn. 2006, 42, 2963–2965. [Google Scholar] [CrossRef]
- Jen, S.; Lee, J.; Yao, Y.; Chen, W. Transverse field dependence of the planar Hall effect sensitivity in Permalloy films. J. Appl. Phys. 2001, 90, 6297–6301. [Google Scholar] [CrossRef]
- Morvic, M.; Betko, J. Planar Hall effect in Hall sensors made from InP/InGaAs heterostructure. Sens. Actuators A Phys. 2005, 120, 130–133. [Google Scholar] [CrossRef]
- Schuhl, A.; Van Dau, F.N.; Childress, J. Low-field magnetic sensors based on the planar Hall effect. Appl. Phys. Lett. 1995, 66, 2751–2753. [Google Scholar] [CrossRef]
- Van Dau, F.N.; Schuhl, A.; Childress, J.; Sussiau, M. Magnetic sensors for nanotesla detection using planar Hall effect. Sens. Actuators A Phys. 1996, 53, 256–260. [Google Scholar] [CrossRef]
- Ejsing, L.; Hansen, M.F.; Menon, A.K.; Ferreira, H.; Graham, D.; Freitas, P. Planar Hall effect sensor for magnetic micro-and nanobead detection. Appl. Phys. Lett. 2004, 84, 4729–4731. [Google Scholar] [CrossRef] [Green Version]
- Ejsing, L.; Hansen, M.F.; Menon, A.K.; Ferreira, H.A.; Graham, D.L.; Freitas, P.P. Magnetic microbead detection using the planar Hall effect. J. Magn. Magn. Mater. 2005, 293, 677–684. [Google Scholar] [CrossRef]
- Tu, B.D.; Danh, T.M.; Duc, N.H. Optimization of planar Hall effect sensor for magnetic bead detection using spin-valve NiFe/Cu/NiFe/IrMn structures. Proc. J. Phys. Conf. Ser. 2009, 187, 012056. [Google Scholar] [CrossRef] [Green Version]
- Hung, T.Q.; Oh, S.; Jeong, J.-R.; Kim, C. Spin-valve planar Hall sensor for single bead detection. Sens. Actuators A Phys. 2010, 157, 42–46. [Google Scholar] [CrossRef]
- Damsgaard, C.D.; Freitas, S.C.; Freitas, P.P.; Hansen, M.F. Exchange-biased planar Hall effect sensor optimized for biosensor applications. J. Appl. Phys. 2008, 103, 07A302. [Google Scholar] [CrossRef] [Green Version]
- Hung, T.Q.; Oh, S.; Sinha, B.; Jeong, J.-R.; Kim, D.-Y.; Kim, C. High field-sensitivity planar Hall sensor based on NiFe/Cu/IrMn trilayer structure. J. Appl. Phys. 2010, 107, 09E715. [Google Scholar] [CrossRef]
- Pişkin, H.; Akdoğan, N. Interface-induced enhancement of sensitivity in NiFe/Pt/IrMn-based planar hall sensors with nanoTesla resolution. Sens. Actuators A Phys. 2019, 292, 24–29. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.-K.; Romalis, M. Calculation of magnetic field noise from high-permeability magnetic shields and conducting objects with simple geometry. J. Appl. Phys. 2008, 103, 084904. [Google Scholar] [CrossRef] [Green Version]
- Griffith, W.C.; Jimenez-Martinez, R.; Shah, V.; Knappe, S.; Kitching, J. Miniature atomic magnetometer integrated with flux concentrators. Appl. Phys. Lett. 2009, 94, 023502. [Google Scholar] [CrossRef] [Green Version]
- Tang, C.; He, Z.; Liu, H.; Xu, Y.; Huang, H.; Yang, G.; Xiao, Z.; Li, S.; Liu, H.; Deng, Y. Application of magnetic nanoparticles in nucleic acid detection. J. Nanobiotechnology 2020, 18, 62. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ejsing, L.W. Planar Hall Sensor for Influenza Immunoassay; Technical University of Denmark (DTU): Kongens Lyngby, Denmark, 2006. [Google Scholar]
- Sinha, B.; Anandakumar, S.; Oh, S.; Kim, C. Micro-magnetometry for susceptibility measurement of superparamagnetic single bead. Sens. Actuators A Phys. 2012, 182, 34–40. [Google Scholar] [CrossRef]
- Hung, T.Q.; Kim, D.Y.; Rao, B.P.; Kim, C. Novel Planar Hall Sensor for Biomedical Diagnosing Lab-on-a-Chip. In State of the Art in Biosensors—General Aspects; Rinken, T., Ed.; InTech: Rijeka, Croatia, 2013; Chapter 9. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Dimension | ||
|---|---|---|---|
| Variant 1 | Variant 2 | Variant 3 | |
| Long axis (a) | 3 mm | 5 mm | 7.5 mm |
| Sensing region’s length (d) | 1.2 mm | 2 mm | 3 mm |
| Short axis (b) | 0.375 mm | 0.625 mm | 0.9375 mm |
| Width of the voltage measuring junction (e) | 0.06 mm | 0.10 mm | 0.15 mm |
| Ni80Fe20 thickness (t) | 60, 120, 200 nm | ||
| Axis ratio (a/b) | 8 | ||
| Sensing area | 0.41 mm2 | 1.15 mm2 | 2.75 mm2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uddin, S.M.; Sayad, A.; Chan, J.; Skafidas, E.; Kwan, P. Design and Optimisation of Elliptical-Shaped Planar Hall Sensor for Biomedical Applications. Biosensors 2022, 12, 108. https://doi.org/10.3390/bios12020108
Uddin SM, Sayad A, Chan J, Skafidas E, Kwan P. Design and Optimisation of Elliptical-Shaped Planar Hall Sensor for Biomedical Applications. Biosensors. 2022; 12(2):108. https://doi.org/10.3390/bios12020108
Chicago/Turabian StyleUddin, Shah Mukim, Abkar Sayad, Jianxiong Chan, Efstratios Skafidas, and Patrick Kwan. 2022. "Design and Optimisation of Elliptical-Shaped Planar Hall Sensor for Biomedical Applications" Biosensors 12, no. 2: 108. https://doi.org/10.3390/bios12020108
APA StyleUddin, S. M., Sayad, A., Chan, J., Skafidas, E., & Kwan, P. (2022). Design and Optimisation of Elliptical-Shaped Planar Hall Sensor for Biomedical Applications. Biosensors, 12(2), 108. https://doi.org/10.3390/bios12020108