Development of Digital Subterranean Models for Real-Time Open Cut Horizon Control

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
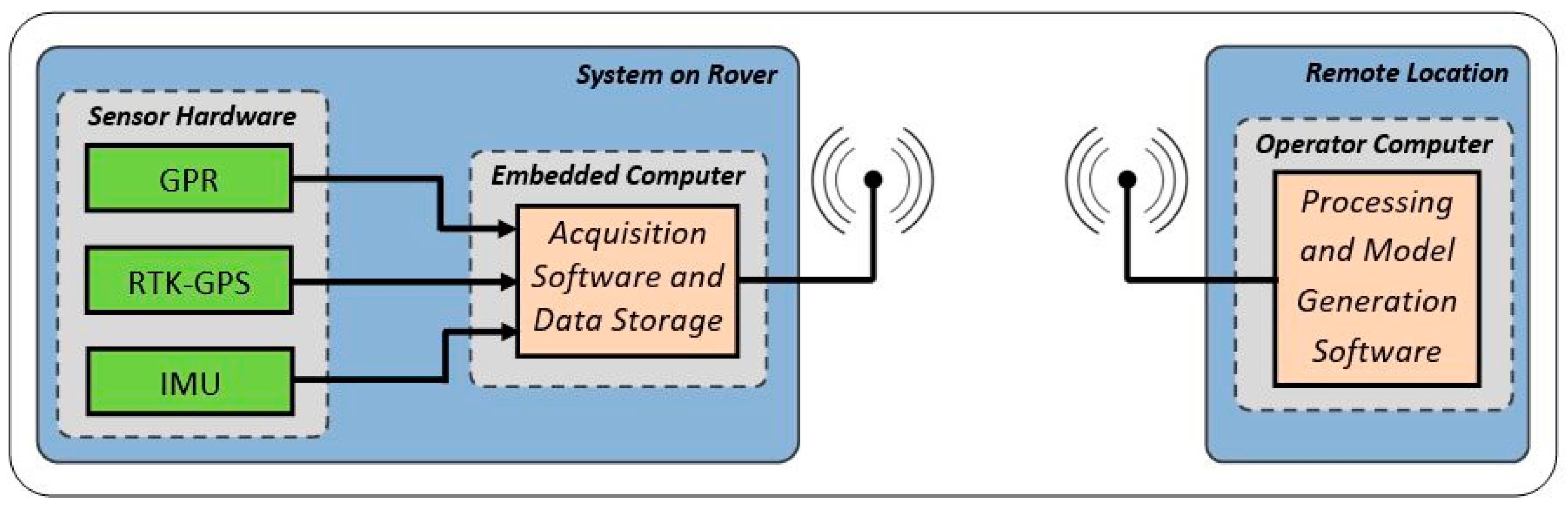
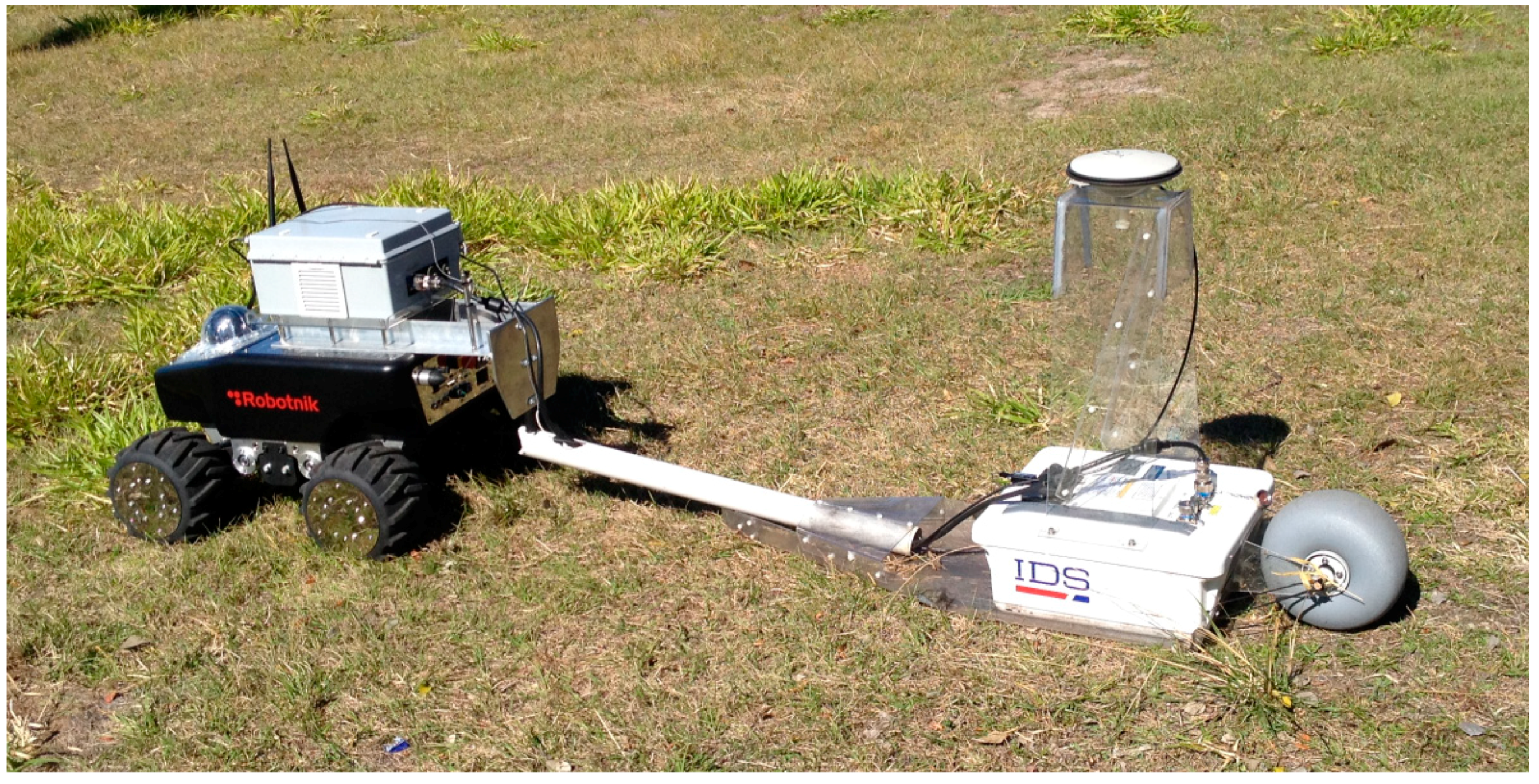
- Sensing System: A sensor package and data acquisition system has been designed whereby a robotic mobility platform under remote control deploys the sensing system in a specified pattern over the area of interest.
- The system hardware and software architecture incorporate a wireless link to an operator display for control and real-time observation of sensor data. Importantly, interruptions to the wireless link do not affect the data acquisition process.
- Information System: The generated digital subterranean model is exported in a format compatible with commercial bulldozer guidance systems thus advancing the work in [28,35] towards practical applications. This eliminates the need for the generation of a full geophysical report from the survey, which decreases the time required to convert the acquired data into a format suitable for use by the end user.
2. Materials and Methods
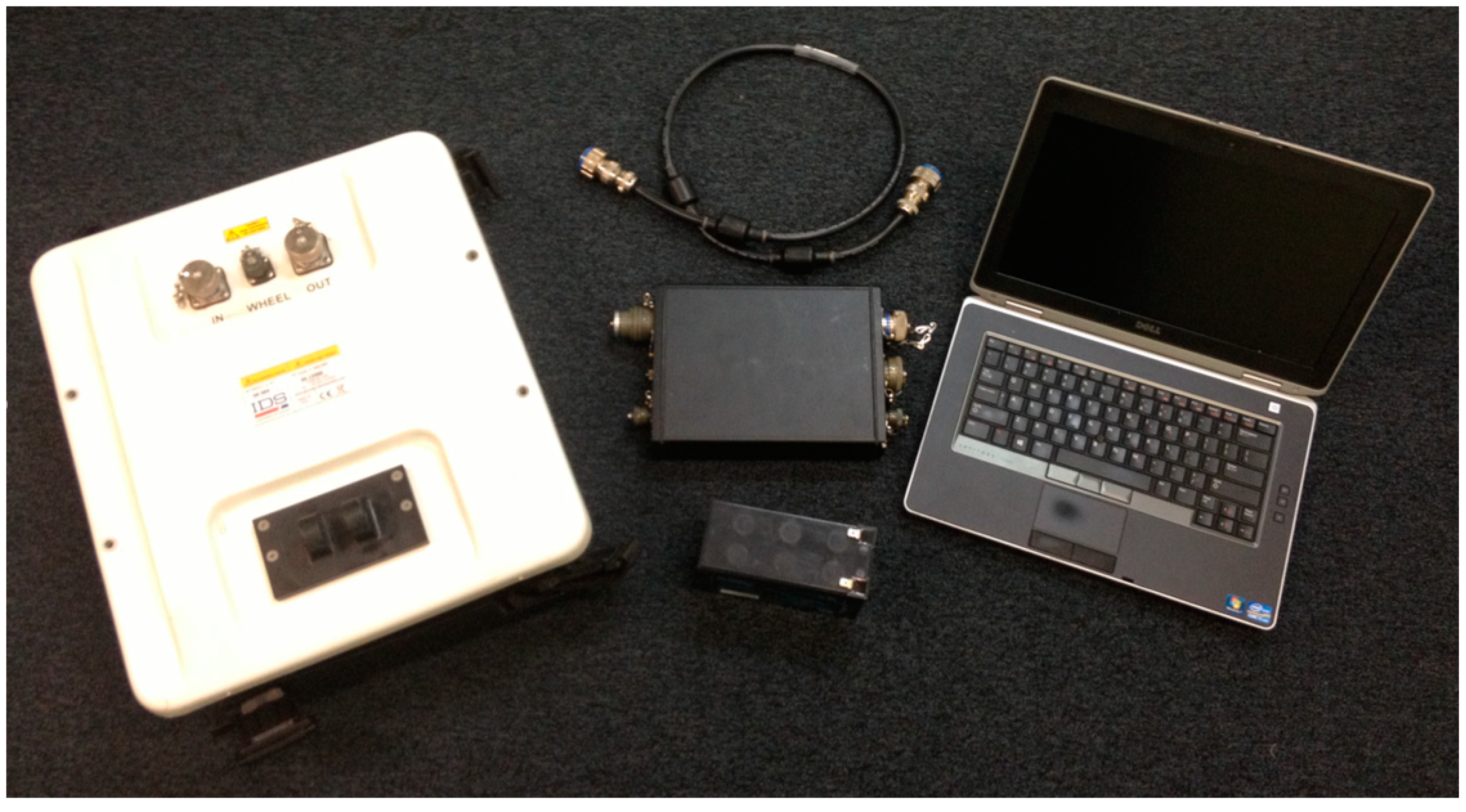
2.1. System Hardware Development
2.1.1. Radar and Position Sensing Components
2.1.2. Computing Hardware
2.1.3. Sensor Sled
2.2. System Software Development
2.2.1. Data Acquisition Software
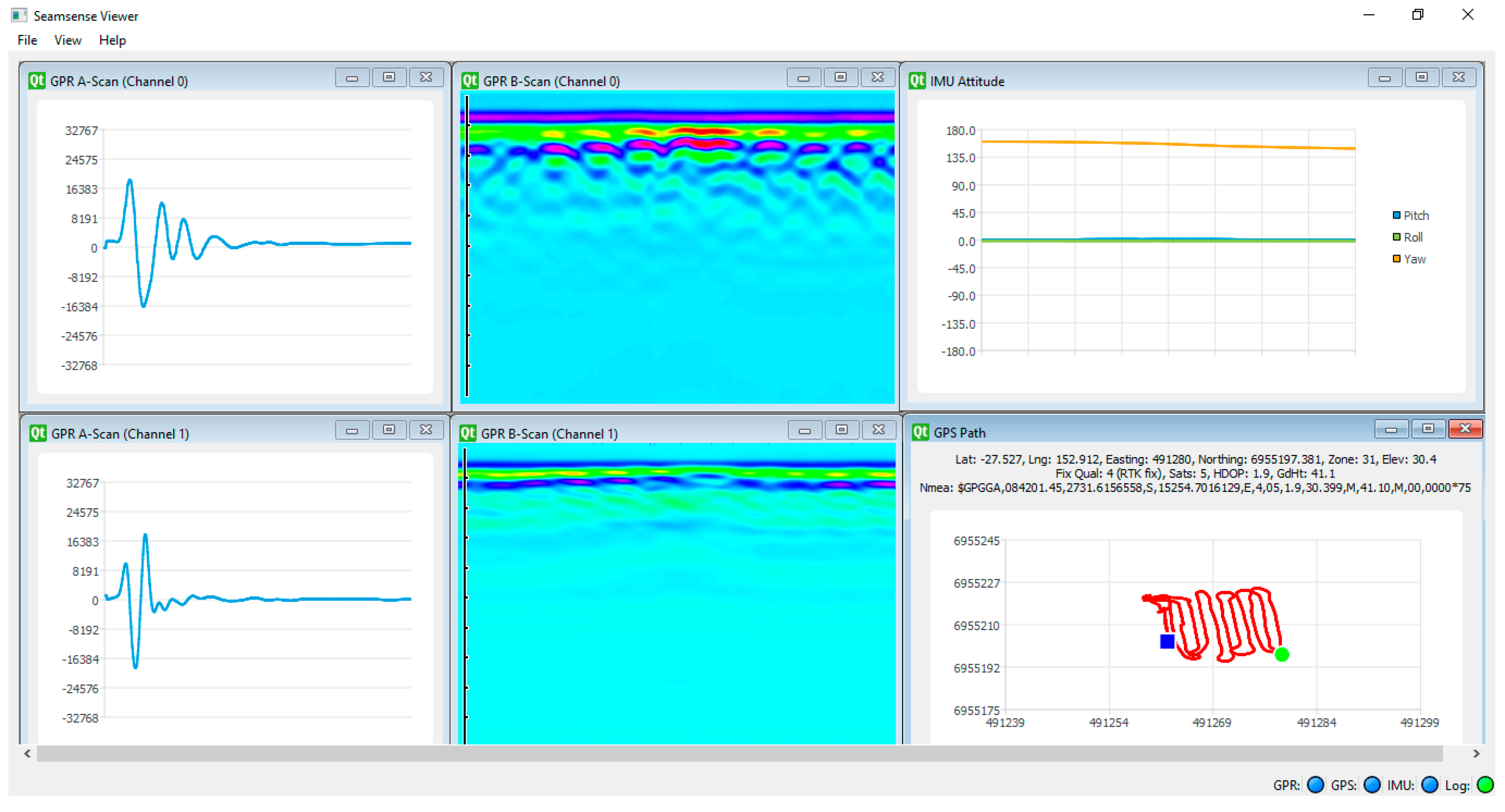
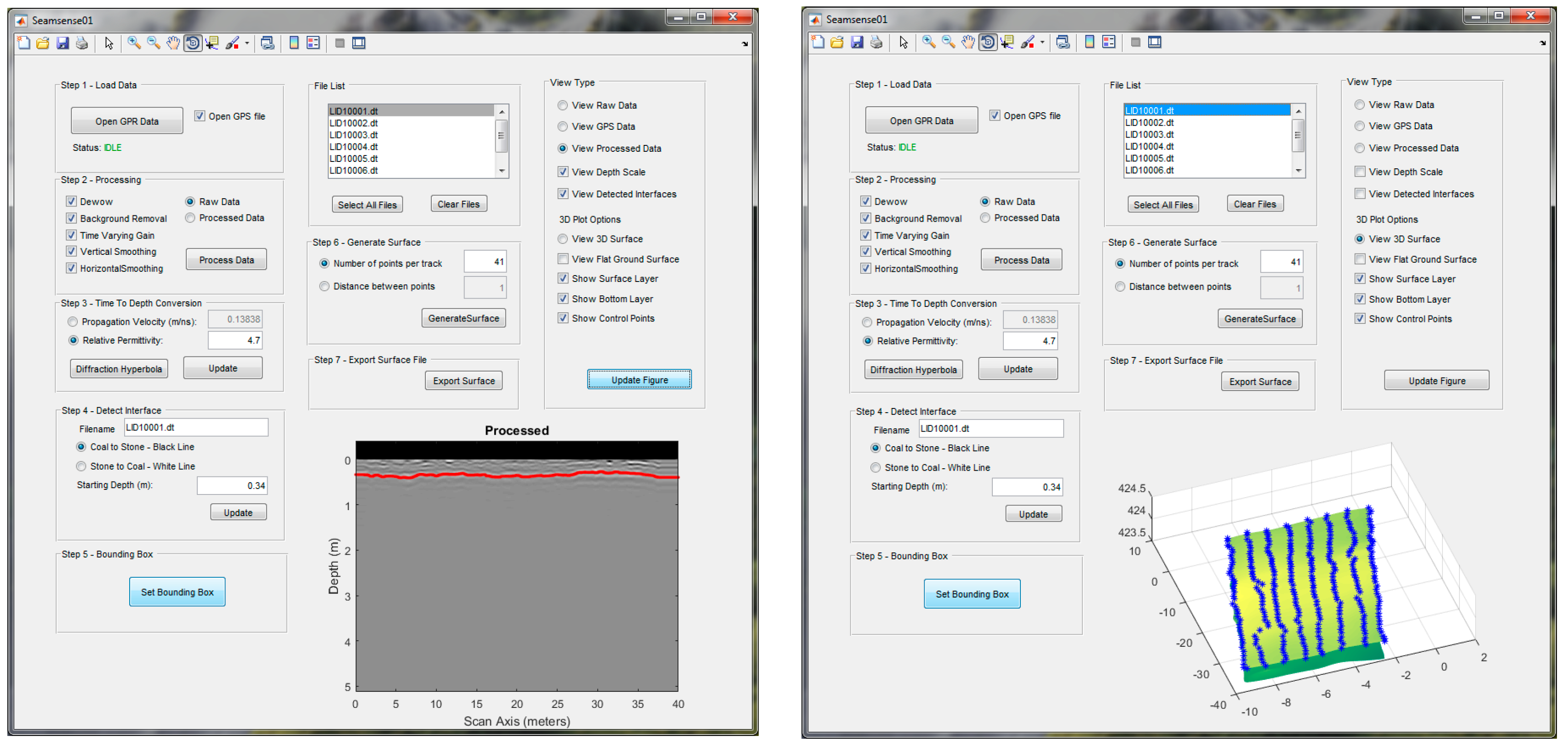
2.2.2. Data Visualization Software
2.2.3. Data Processing Software
3. Results
3.1. Overview
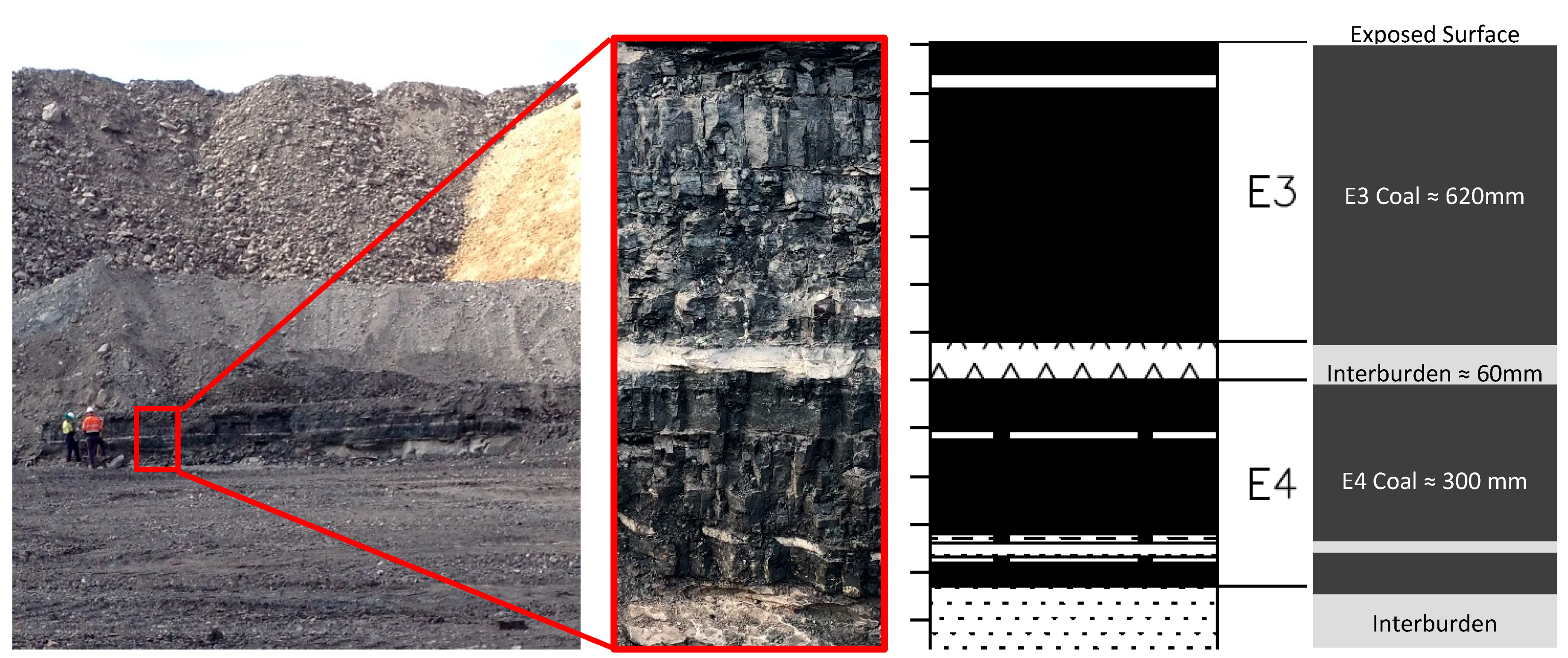
3.2. Geology
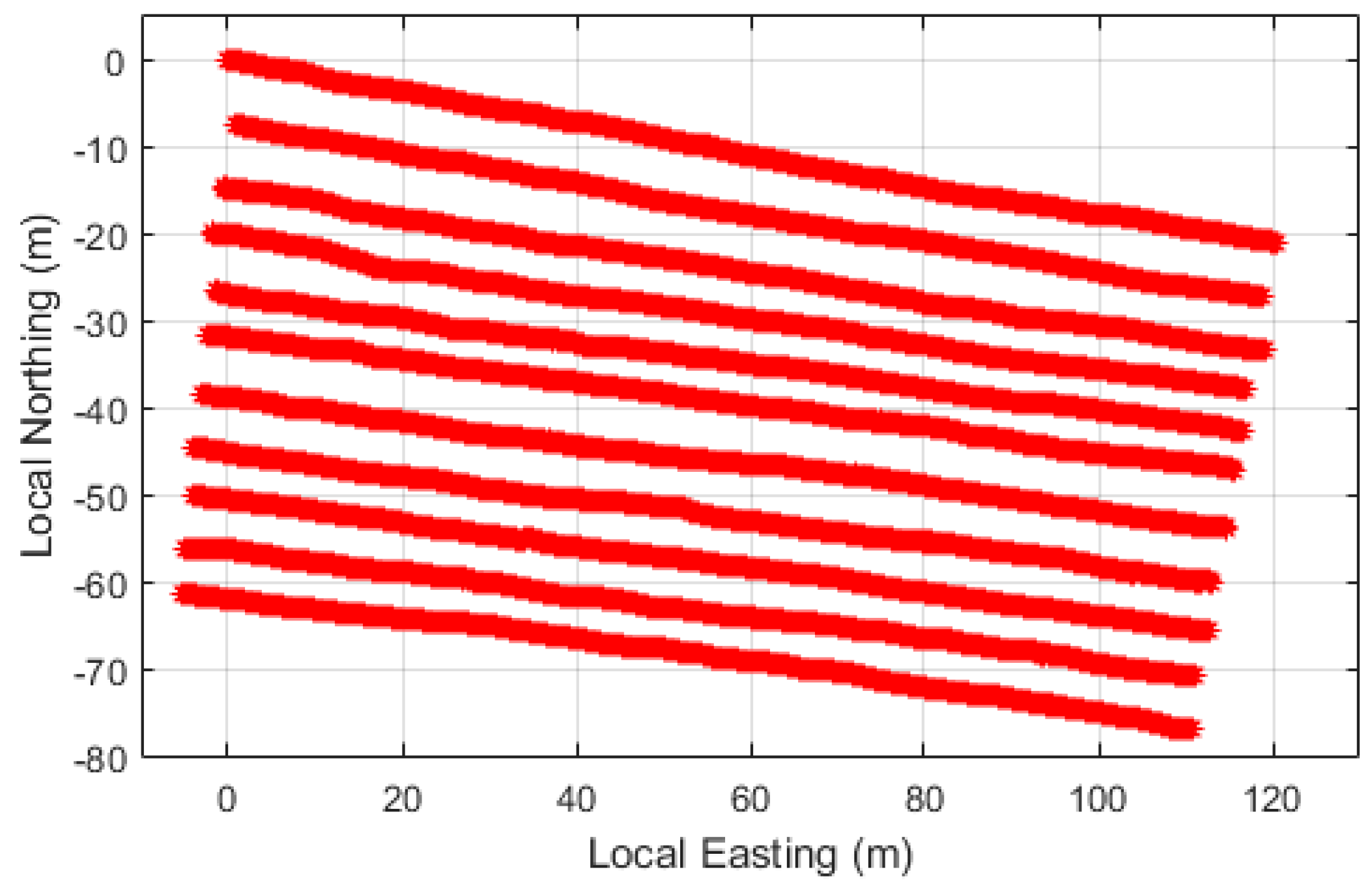
3.3. Sensing Position
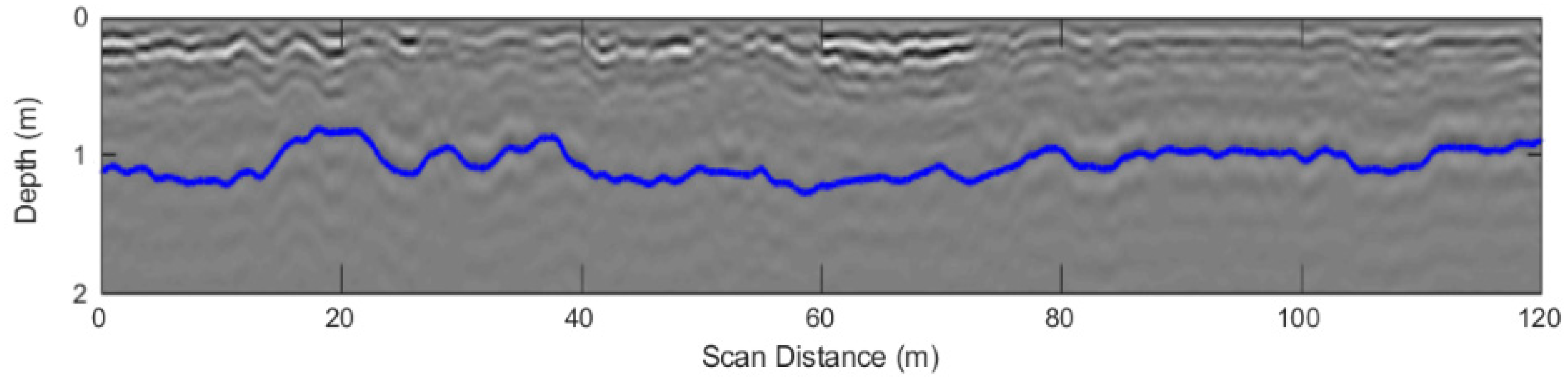
3.4. Data Processing
3.5. Digital Subterranean Model
3.6. In-cab Fleet Management Guidance System
3.7. Comparison Between Digital Subterranean Model and Mined Surface
4. Discussion
5. Conclusions
- A system has been developed that can scan the surface of an open cut coal mine block using commercially available GPR equipment and a robotic tow vehicle;
- Custom software has been developed to acquire, visualize and process the data and generate digital subterranean models suitable to guide bulldozer mining machines;
- The full system was demonstrated at a production mine site, when a bulldozer operator mined with a digital surface model uploaded to the in-cab machine guidance display;
- The digital models generated will be suitable for remotely controlled extraction processes in a digital mine environment.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Abzalov, M. Applied Mining Geology; Springer: Berlin/Heidelberg, Germany, 2016; p. 448. ISBN 978-3-319-39263-9. [Google Scholar]
- Annan, A.P. Electromagnetic Principles of Ground Penetrating Radar. In Ground Penetrating Radar: Theory and Applications, 1st ed.; Jol, H.M., Ed.; Elsevier: Amsterdam, The Netherlands, 2009; pp. 3–40. ISBN 978-0-444-53348-7. [Google Scholar]
- Daniels, D.J. Ground Penetrating Radar; The Institution of Electrical Engineers: Stevenage, UK, 2004; p. 726. ISBN 0-86341-360-9. [Google Scholar]
- Conyers, L.B. Ground-Penetrating Radar for Archaeology; AltaMira Press: Lanham, MD, USA, 2004; p. 224. ISBN 978-0759107731. [Google Scholar]
- Conyers, L.B.; Goodman, D. Ground-Penetrating Radar: An Introduction for Archaeologists; AltaMira Press: Walnut Creek, CA, USA, 1997; p. 232. ISBN 0-7619-8927-7. [Google Scholar]
- Solla, M.; Puente, I.; Lorenzo, H.; Prego, F.J. GPR detection of underground pipes. In Proceedings of the 9th International Workshop on Advanced Ground Penetrating Radar (IWAGPR 2017), Edinburgh, Scotland, 28–30 June 2017; pp. 1–6. [Google Scholar]
- Ciampoli, L.B.; Benedetto, A.; Pajewski, L.; Alani, A.M.; Tosti, F. A comparison between different central frequencies of investigation in buried utility detection through GPR: A study case. In Proceedings of the 16th International Conference on Ground Penetrating Radar (GPR 2016), Hong Kong, China, 13–16 June 2016; pp. 1–4. [Google Scholar]
- Montoya, T.P.; Smith, G.S. Land mine detection using a ground-penetrating radar based on resistively loaded Vee dipoles. IEEE Trans Antennas Propag. 1999, 47, 1795–1806. [Google Scholar] [CrossRef]
- Missaoui, O.; Frigui, H.; Gader, P. Land-mine detection with ground-penetrating radar using multistream discrete hidden markov models. IEEE Trans Geosci. Remote Sens. 2011, 49, 2080–2099. [Google Scholar] [CrossRef]
- Shrestha, S.M.; Arai, I. High resolution image reconstruction by GPR using MUSIC and SAR processing method for landmine detection. In Proceedings of the 2003 International Geoscience and Remote Sensing Symposium (IGARSS 2003), Toulouse, France, 21–25 July 2003; pp. 2921–2923. [Google Scholar]
- Léger, E.; Dafflon, B.; Soom, F.; Peterson, J.; Ulrich, C.; Hubbard, S. Quantification of arctic soil and permafrost properties using ground-penetrating radar and electrical resistivity tomography datasets. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4348–4359. [Google Scholar] [CrossRef] [Green Version]
- Annan, P.; Diamanti, N.; Redman, J.; Jackson, S. Ground-penetrating radar for assessing winter roads. Geophysics 2016, 81, WA101–WA109. [Google Scholar] [CrossRef]
- Roberts, R.L.; Petroy, D. Semi-automatic processing of GPR data collected over pavement. In Proceedings of the 6th International Conference on Ground Penetrating Radar (GPR ’96), Sendai, Japan, 30 September–3 October 1996; pp. 347–352. [Google Scholar]
- Spagnolini, U.; Rampa, V. Multitarget detection/tracking for monostatic ground penetrating radar: Application to pavement profiling. IEEE Trans. Geosci. Remote Sens. 1999, 37, 383–394. [Google Scholar] [CrossRef]
- Ellerbruch, D.A.; Adams, J.W. Microwave Measurement of Coal Layer Thickness; Tech. Rep. NBSIR 74-387; National Bureau of Standards: Boulder, CO, USA, 1974.
- Ellerbruch, D.A.; Belsher, D.R. Electromagnetic technique of measuring coal layer thickness. IEEE Trans. Geosci. Electron. 1978, GE-16, 126–133. [Google Scholar] [CrossRef]
- Roe, K.C.; Wittmann, R.C. Improved Coal Interface Detector; Tech. Rep. NBSIR 82-1663; National Bureau of Standards: Boulder, CO, USA, 1982.
- Daniels, D.J. Short pulse radar for stratified lossy dielectric layer measurement. IEE Proc. F 1980, 127, 384–388. [Google Scholar] [CrossRef]
- Chufo, R.L.; Johnson, W.J. A radar coal thickness sensor. IEEE Trans Ind. Appl. 1993, 29, 834–840. [Google Scholar] [CrossRef]
- Ralston, J.C.; Hainsworth, D.W. Application of ground penetrating radar for coal depth measurement. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP’99), Speech, Phoenix, AZ, USA, 15–19 March 1999; volume 4, pp. 2275–2278. [Google Scholar]
- Ralston, J.C.; Hainsworth, D.W. Use of ground penetrating radar in underground coal mining. In Proceedings of the 8th International Conference on Ground Penetrating Radar (GPR 2000), Gold Coast, Australia, 23–26 May 2000; pp. 731–736. [Google Scholar]
- Ralston, J.C.; Hainsworth, D.W.; McPhee, R.J. Application of ground penetrating radar for coal thickness measurement. In Proceedings of the IEEE TENCON ’97, Brisbane, Australia, 4 December 1997; pp. 835–838. [Google Scholar]
- Ralston, J.C.; Hainsworth, D.W.; Reid, D.C.; Anderson, D.L.; McPhee, R.J. Recent advances in remote coal mining machine sensing, guidance, and teleoperation. Robotica 2001, 19, 513–526. [Google Scholar] [CrossRef]
- Mowrey, G.L.; Ganoe, C.W.; Monaghan, W.D. A radar-based high-wall rib-thickness monitoring system. Soc. Min. Metall. Explor. Inc. 1995, 298, 1865–1869. [Google Scholar]
- Turner, G.; Yelf, R.J.; Hatherly, P.J. Coal mining applications of ground radar. Explor. Geophys. 1989, 20, 165–168. [Google Scholar] [CrossRef]
- Yelf, R.J. Ground penetrating radar in open pit coal mines for mapping of overburden, seam thickness and guidance of continuous mining machines. In Proceedings of the 6th International Conference on Ground Penetrating Radar (GPR ’96), Sendai, Japan, 30 September–3 October 1996; pp. 113–116. [Google Scholar]
- Mathiak, T.; Kesting, M.; Overmeyer, L.; Gau, V. Methodology for automatic boundary layer detection using ground penetrating radar. In Proceedings of the 6th International Workshop on Advanced Ground Penetrating Radar (IWAGPR 2011), Aachen, Germany, 22–24 June 2011; pp. 250–254. [Google Scholar]
- Erten, O.; Kizil, M.S.; Topal, E.; McAndrew, L. Spatial prediction of lateral variability of a laterite-type bauxite horizon using ancillary ground-penetrating radar data. Nat. Resour. Res. 2013, 22, 207–227. [Google Scholar] [CrossRef]
- Erten, O. Profiling and Mining Control to Mitigate Dilution Effect from SIO2 at the Base of a Bauxite Deposit. Ph.D. Thesis, School of Mechanical and Mining Engineering, The University of Queensland, Queensland, Australia, 2012. [Google Scholar]
- Dagasan, Y. Development of a Grade Control Technique Optimizing Dilution and Ore Loss Trade-Off in Lateritic Bauxite Deposits. Ph.D. Thesis, WA School of Mines, Curtin University, Western Australia, Australia, 2018. [Google Scholar]
- Santos, V.R.N.; Teixeira, F.L. Application of time-reversal-based processing techniques to enhance detection of GPR targets. J. Appl. Geophys. 2017, 146, 80–94. [Google Scholar] [CrossRef] [Green Version]
- Ciuonzo, D.; Romano, G.; Solimene, R. Performance Analysis of Time-Reversal MUSIC. IEEE Trans. Signal Process. 2015, 63, 2650–2662. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Rossi, P.S. Noncolocated Time-Reversal MUSIC: High-SNR Distribution of Null Spectrum. IEEE Signal Process. Lett. 2017, 24, 397–401. [Google Scholar] [CrossRef] [Green Version]
- Lever, J.H.; Delaney, A.J.; Ray, L.E.; Trautmann, E.; Barna, L.A.; Burzynski, A.M. Autonomous GPR surveys using the polar rover. Yeti. J. Field Robot. 2013, 30, 194–215. [Google Scholar] [CrossRef]
- Furgale, P.; Barfoot, T.D.; Ghafoor, N.; Williams, K.; Osinski, G. Field testing of an integrated surface/subsurface modeling technique for planetary exploration. Int. J. Robot. Res. 2010, 29, 1529–1549. [Google Scholar] [CrossRef]
- MineScape. Available online: https://new.abb.com/enterprise-software/intelligent-mining-solutions/minescape (accessed on 13 March 2017).
- Bentley View. Available online: https://www.bentley.com/en/products/product-line/modeling-and-visualization-software/bentley-view (accessed on 27 September 2017).
- Intergovernmental Committee on Surveying and Mapping. Geocentric Datum of Australia 2020 Technical Manual. Available online: https://www.icsm.gov.au/sites/default/files/GDA2020TechnicalManualV1.1.1.pdf (accessed on 16 March 2018).

















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Strange, A.D.; Jecny, Z. Development of Digital Subterranean Models for Real-Time Open Cut Horizon Control. Resources 2020, 9, 50. https://doi.org/10.3390/resources9040050
Strange AD, Jecny Z. Development of Digital Subterranean Models for Real-Time Open Cut Horizon Control. Resources. 2020; 9(4):50. https://doi.org/10.3390/resources9040050
Chicago/Turabian StyleStrange, Andrew D., and Zak Jecny. 2020. "Development of Digital Subterranean Models for Real-Time Open Cut Horizon Control" Resources 9, no. 4: 50. https://doi.org/10.3390/resources9040050
APA StyleStrange, A. D., & Jecny, Z. (2020). Development of Digital Subterranean Models for Real-Time Open Cut Horizon Control. Resources, 9(4), 50. https://doi.org/10.3390/resources9040050