
IC-Based Neuro-Stimulation Environment for Arbitrary Waveform Generation

 , , and
, , and
Abstract
:1. Introduction
- Energy efficient waveforms: Biphasic current stimulation is performed on electrodes that are mainly capacitive. The associated voltage can reach tens of volts and the resulting amount of energy for stimulation can be high compared to the overall consumption of implants. To decrease the battery volume or increase its lifetime, modifications of the waveshape have been proposed. In [17], the authors used a linear model of the electrode to lower the stimulation voltage by subdividing the cathodic pulse and calculating successive values of stimulation current. In [18,19], computational models of the electrode impedance are used with optimization algorithms to produce biphasic exponential decaying pulses. Complex pulses including triangle, linear decay, gaussians or sinusoidal pulses are investigated in [20,21].
- Increased selectivity waveforms: The recruitment of identified cells or the activation of small groups of fiber has also been investigated. Modulating the shape of the cathodic pulse by taking into account specific properties of targeted cells, enables to discriminate them [22]. Techniques such as slow rising pulses, pre-pulse for cell depolarization or anodal block have also been used [23].
- High-frequency blocking stimulation (HFBS): Stimulation with frequencies above 1 kHz has been reported to block axonal activities [24]. This technique is used in various contexts [25,26] to block pain signals or unwanted direction propagation of neural signals with conventional stimulation. The waveform consists of a square or sinusoidal waveform with a frequency starting from 5 kHz to a maximum of 70 kHz [27] and limited by available stimulator performances [28], discriminating capabilities between groups of fiber occurs near this frequential limit [29].
- Biomimetic/controllable burst stimulation: The rehabilitation of complex activities requires accurate recruitment of large groups of cells. This is usually addressed by modulating the envelope of bursts of biphasic stimuli. This method was for example recently used to improve the naturalness of tactile sensory rehabilitation [30]. In the case of closed loop controlled therapeutic strategy such as respiratory control, this envelope can also be adapted in real-time to control physiological reaction [31].
2. Materials and Methods
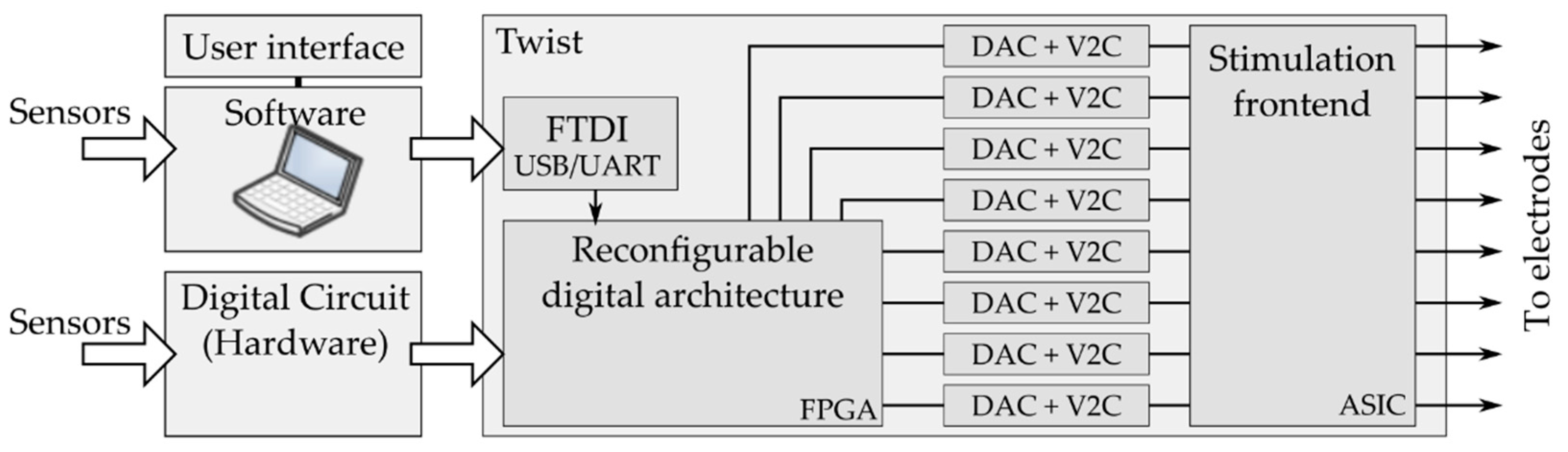
2.1. Design Methodology: System Overview
2.2. Materials for Analog and Digital Designs
2.3. Stimulation Front-End: A Versatile ASIC
2.3.1. ASIC Architecture
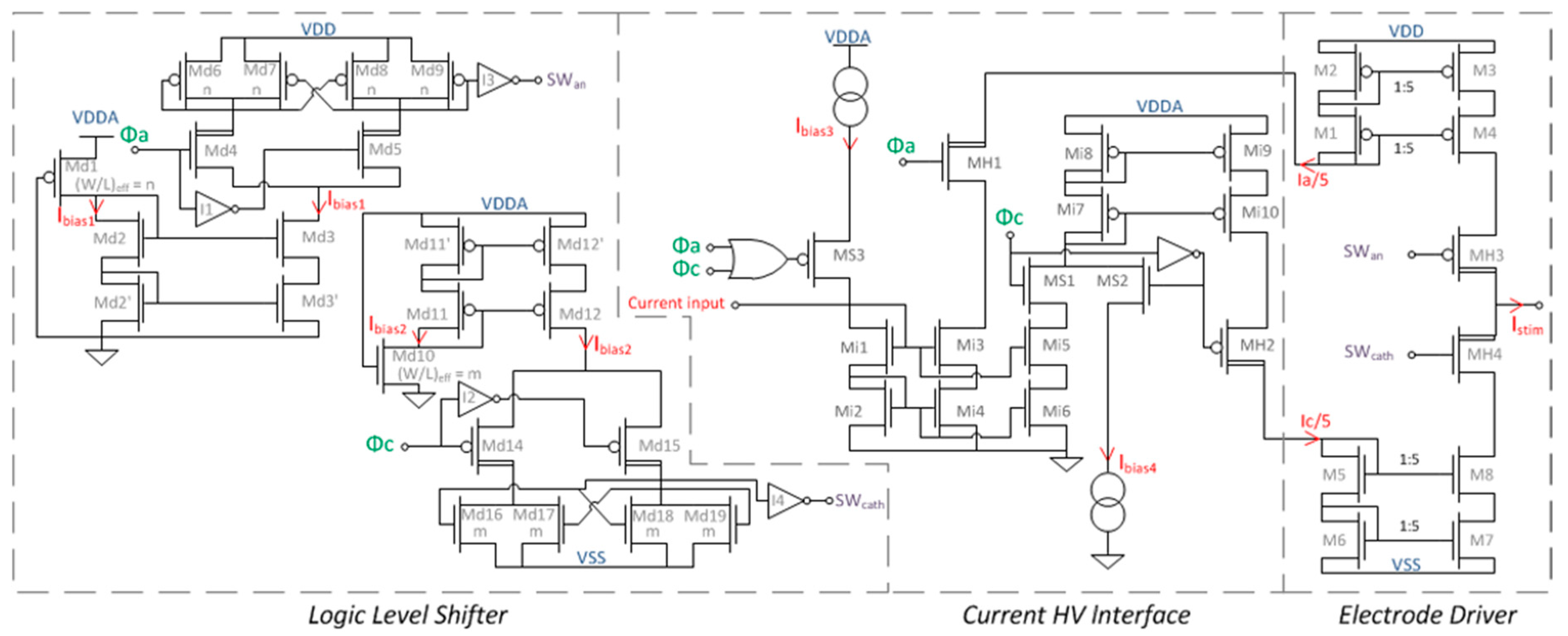
2.3.2. Elementary Stimulation Channels
- (a)
- Electrode Driver
- (b)
- Current HV Interface
- (c)
- Logic Level Shifter
2.4. Digital to Analog Conversion Stage
2.5. Reconfigurable Digital Architecture
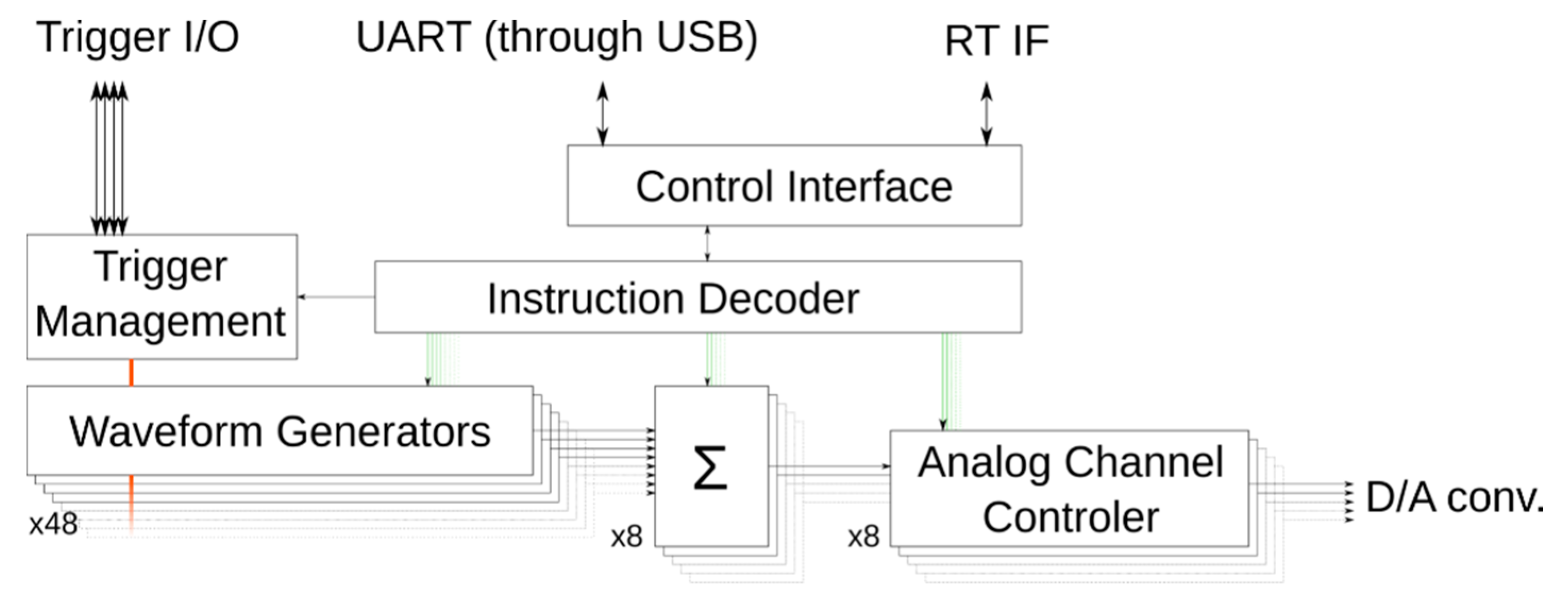
2.5.1. Overview of the System Architecture
- Waveform generators (WG): deliver the output waveforms provided to the DACs;
- Analog channel controller (ACC): manages analog output channels;
- Trigger management (TrM): handles synchronization and WG start;
- Instruction decoder: provides the logical interface with the master;
- Control interface: manages the physical interface with the master.
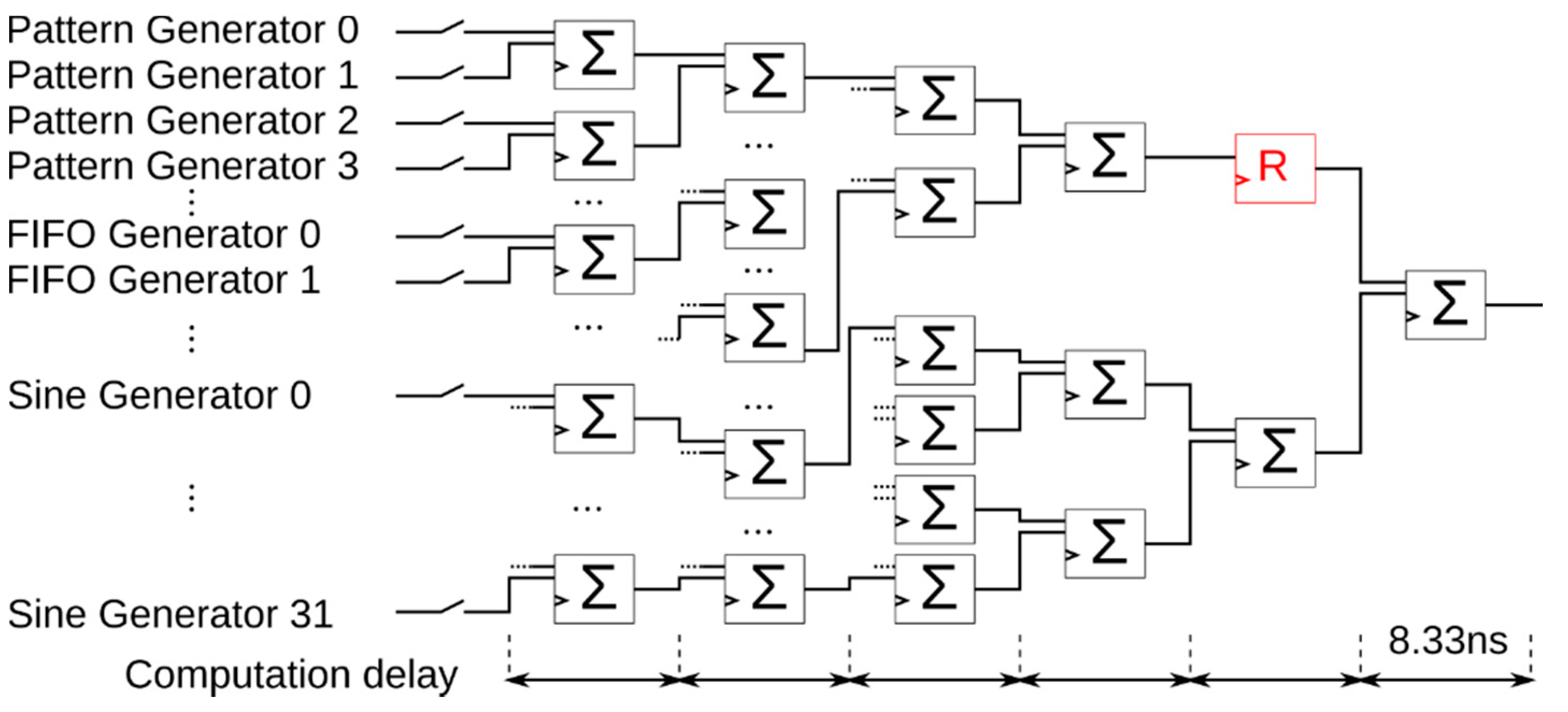
2.5.2. Waveform Generators
- Pattern players: These address conventional pattern-based stimulators. The master uploads a waveform to the TWIST board, which is played as soon as the associated trigger is active at a maximal rate of 20 Msamples/s. The default system contains 8 pattern players, each of them associated to a 16 k-sample memory. Although the system architecture does not restrict the maximal number of pattern generators, the instruction set is able to address only 16 of them. This limitation was considered secondary since the system only provides 8 analog outputs.
- FIFO outputs: These are intended to provide a continuous stream of data issued by the master. These generators are different from the pattern player in that their associated memory is not dedicated to store a repeated pattern, but only as a buffer to maintain the stability of the data flow. Each FIFO output can produce data at a rate of 20 Msamples/s; however, in the default system, communication limits the maximum sample rate to 5 Msamples/s distributed on 8 FIFO outputs. Although these generators are designed for continuous streaming, they are trigger-sensitive to ensure synchronous streaming and possibly synchronous stimulation on parallel channels.
- Sine generator: This provides sine waveforms computed internally. The output frequency is programmable from 1 mHz to 1.19 MHz by steps of 1 mHz. As there are 32 sine generators on the default system, the generator architecture has been chosen to be both fast and low resource demanding. Sine values are usually computed using a CORDIC architecture [48], but this technique suffers from large hardware resources requirement and computation latency. We chose to implement sine wave computation using a recursive generator based on the forward Euler resolution of the equation f”(x) = −f(x). The integration step is a multiple by a power of 2 of the digital clock, so that no multiplier is necessary but only bit shifting operations. When the desired frequency is not directly achievable by a multiple of a power of 2, the nearest candidates are used alternatively during the generated sine period so that the average of the integration step corresponds to the targeted frequency.
2.5.3. Interfacing and Control
- The first interface is dedicated to computer-based control. It provides UART connectivity through USB connection using a FTDI bridge. A control library has been developed using python3 language. This interface runs at 921,600 bps (bits per second) and is suitable for high level control of the stimulation (load stimulus waveform when stimulation is off, manual start and stop).
- The second interface is dedicated for real-time hardware control. It proposes 3 interface modes: standard UART, high-performance and SPI. The standard UART mode makes sure that any digital hardware device can control the system. It supports communication speed from 9600 bps to 33.3 Mbps by steps of 200 bps. The high-performance mode is based on three 16-bit words UART lines from master to TWIST and one feedback line from TWIST to the master. The three combined lines make transfers up to 100 Mbps possible, while 16-bit words improve communication efficiency. The SPI mode is finally available for synchronous transfers. It handles 40 Mbps bidirectional transfers without hardware protocol overload. This interface requires 4 I/Os. A detection mechanism lets the system determine which mode is used (UART, SPI or High performance) so that any controller with standard UART or SPI works without specific configuration.
3. Results
3.1. Hardware Electrical Characterization
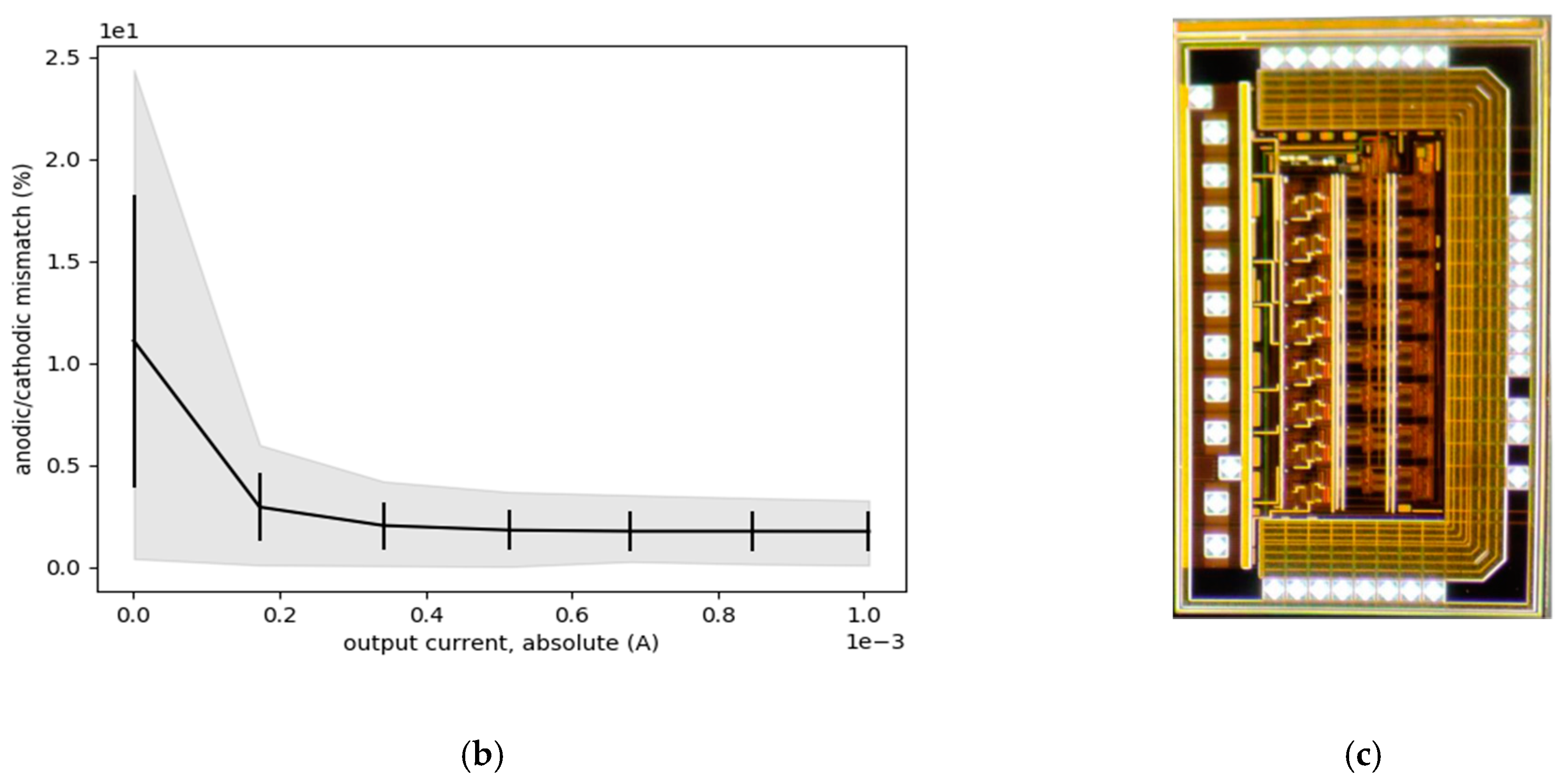
3.1.1. Chip Fabrication and Characterization
3.1.2. Static Linearity
3.1.3. Frequency/Load Stimulation Range
- An upper load limit (maximum load limit), resulting from the voltage induced by current quantum (output DAC LSB) compared to the maximum compliance voltage. This limits the highest possible load at low frequencies. Pushing this boundary implies either increasing the number of bits of the digital to analog conversion or increasing the voltage compliance.
- An upper frequency (maximum frequency limit) limit related to the sampling frequency of the digital to analog conversion. The 20 MHz output sampling bounds the theoretical limit to 10 MHz, but Figure 11a stops at 1 MHz to preserve sine waveforms fidelity and avoid potential misinterpretation.
- A boundary with the yellow part of the gain scale (−3 dB limit), induced by the dynamic output parasitic impedance of the ESC. This boundary (minimum gain limit) follows a 1 decade per decade trend, related to the parallel resistive-capacitive nature of the parasitic impedance of the output current mirrors or the ESC. Pushing this boundary implies to reduce the size of output channel transistors.
3.1.4. Dynamic Linearity
3.1.5. Digital Resource Consumption
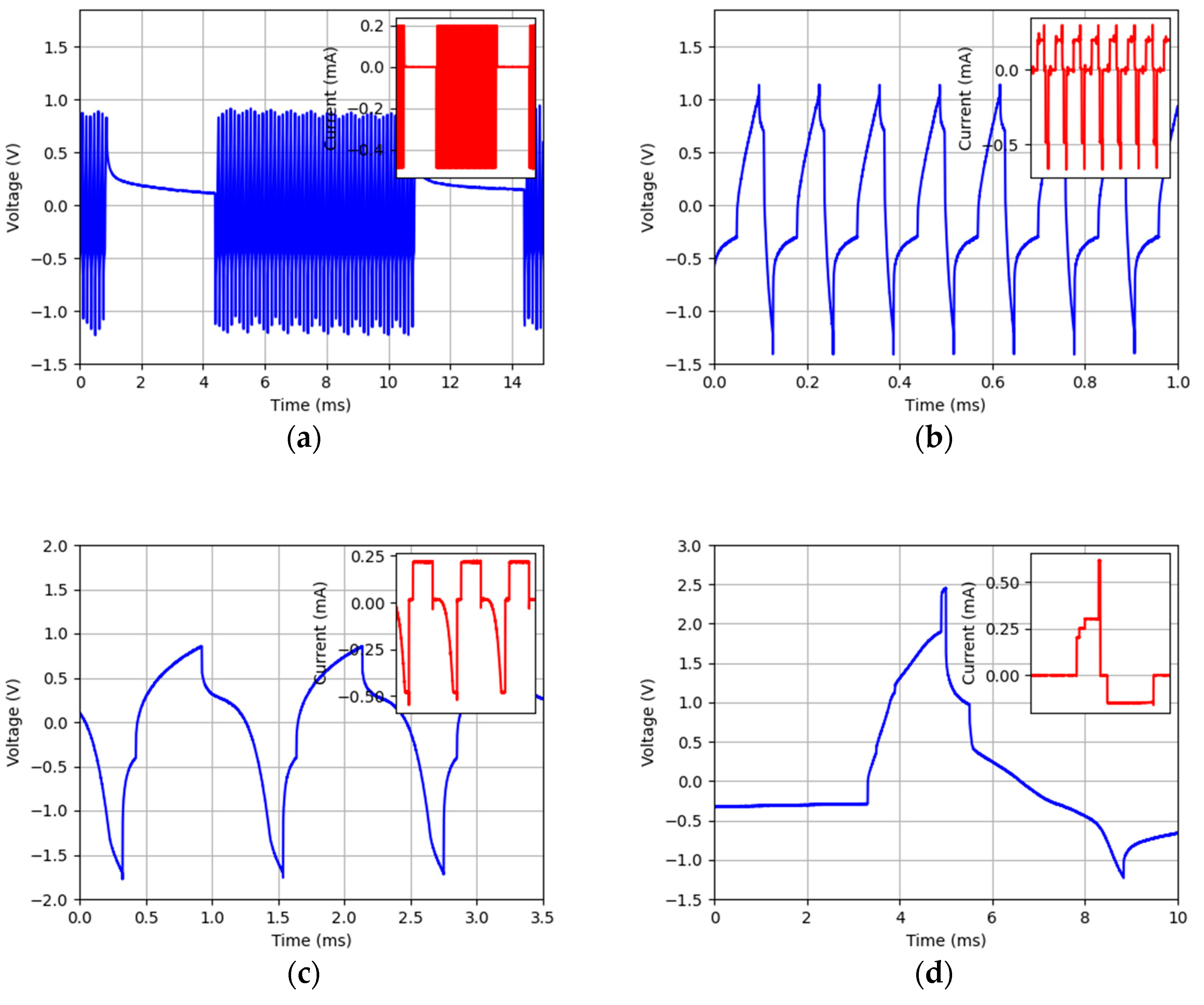
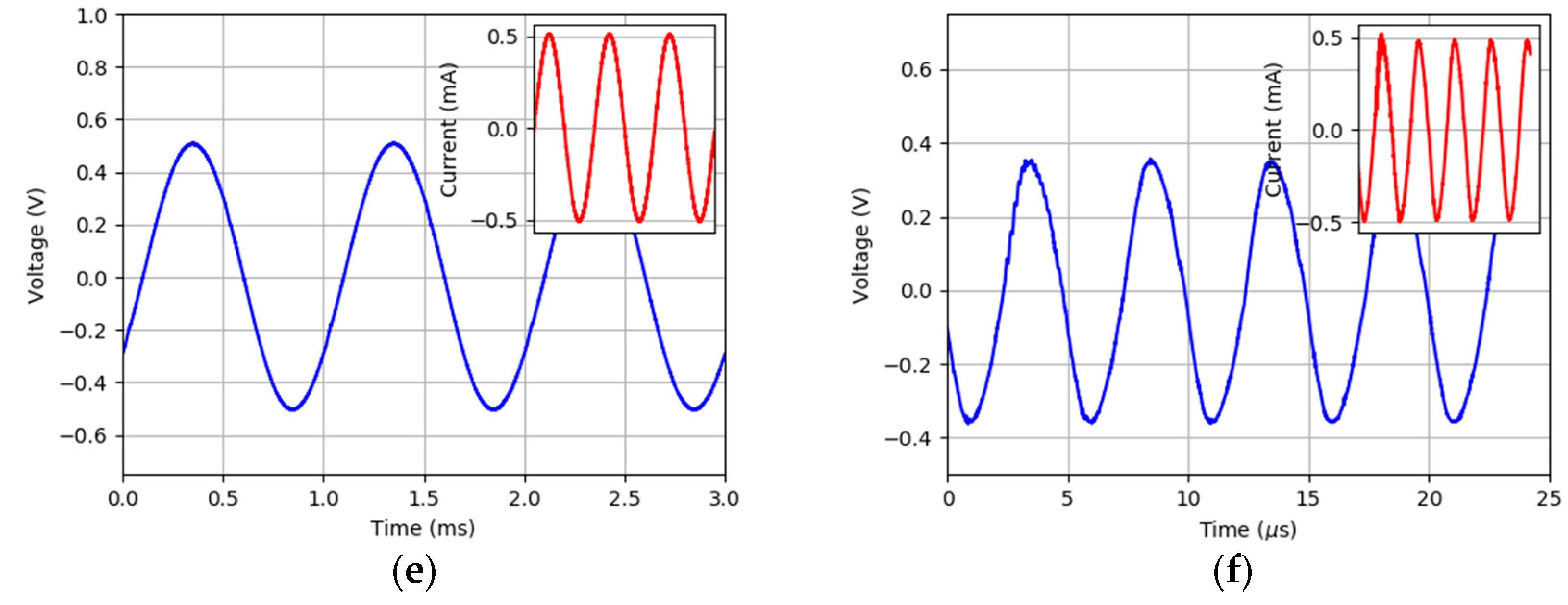
3.2. Waveform Generation
- High-frequency blocking stimulation: Figure 14e,f with sinus stimulation at 1 kHz and 200 kHz, respectively, on a CUFF electrode.
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wilson, B.S.; Dorman, M.F. Cochlear implants: A remarkable past and a brilliant future. Hear. Res. 2008, 242, 3–21. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chader, G.J.; Weiland, J.; Humayun, M.S. Artificial vision: Needs, functioning, and testing of a retinal electronic pros-thesis. In Progress in Brain Research; Verhaagen, J., Hol, E.M., Huitenga, I., Wijnholds, J., Bergen, A.B., Boer, G.J., Swaab, D.F., Eds.; Elsevier: Amsterdam, The Netherlands, 2009; Volume 175, pp. 317–332. [Google Scholar]
- Wall, C.; Merfeld, D.M.; Rauch, S.D.; Black, F.O. Vestibular prostheses: The engineering and biomedical issues. J. Vestib. Res. 2003, 12, 95–113. [Google Scholar] [CrossRef]
- Pasluosta, C.; Kiele, P.; Stieglitz, T. Paradigms for restoration of somatosensory feedback via stimulation of the peripheral nervous system. Clin. Neurophysiol. 2018, 129, 851–862. [Google Scholar] [CrossRef]
- Hamzaid, N.A.; Davis, G.M. Health and fitness benefits of functional electrical stimulation-evoked leg exercise for spinal cord-injured individuals. Top. Spinal Cord Inj. Rehabil. 2009, 14, 88–121. [Google Scholar] [CrossRef] [Green Version]
- Carrington, E.V.; Evers, J.; Grossi, U.; Dinning, P.; Scott, S.M.; O’Connell, P.R.; Jones, J.; Knowles, C.H. A systematic review of sacral nerve stimulation mechanisms in the treatment of fecal incontinence and constipation. Neurogastroenterol. Motil. 2014, 26, 1222–1237. [Google Scholar] [CrossRef] [PubMed]
- Steers, W.D. Pathophysiology of overactive bladder and urge urinary incontinence. Rev. Urol. 2002, 4, S7–S18. [Google Scholar] [PubMed]
- Creasey, G.; Elefteriades, J.; DiMarco, A.; Talonen, P.; Bijak, M.; Girsch, W.; Kantor, C. Electrical stimulation to restore respiration. J. Rehabil. Res. Dev. 1996, 33, 10. [Google Scholar]
- Mailis-Gagnon, A.; Furlan, A.; Sandoval, J.A.; Taylor, R.S. Spinal cord stimulation for chronic pain. Cochrane Database Syst. Rev. 2013. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jackson, A.; Zimmermann, J. Neural interfaces for the brain and spinal cord-restoring motor function. Nat. Rev. Neurol. 2012, 8, 690–699. [Google Scholar] [CrossRef]
- Limousin, P.; Krack, P.; Pollak, P.; Benazzouz, A.; Ardouin, C.; Hoffmann, D.; Benabid, A.-L. Electrical stimulation of the subthalamic nucleus in advanced Parkinson’s disease. N. Engl. J. Med. 1998, 339, 1105–1111. [Google Scholar] [CrossRef] [PubMed]
- Starr, P.A. Chapter 16—Deep brain stimulation for other tremors, myoclonus, and chorea. In Handbook of Clinical Neurology; Lozano, A.M., Hallett, M., Eds.; Elsevier: Amsterdam, The Netherlands, 2013; Volume 116, pp. 209–215. [Google Scholar]
- Mayberg, H.S.; Lozano, A.M.; Voon, V.; McNeely, H.E.; Seminowicz, D.; Hamani, C.; Schwalb, J.M.; Kennedy, S. Deep brain stimulation for treatment-resistant depression. Neuron 2005, 45, 651–660. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- De Ridder, D.; De Mulder, G.; Walsh, V.; Muggleton, N.; Sunaert, S.; Møller, A. Magnetic and electrical stimulation of the auditory cortex for intractable tinnitus: Case report. J. Neurosurg. 2004, 100, 560–564. [Google Scholar] [CrossRef]
- Connor, D.E.; Nixon, M.; Nanda, A.; Guthikonda, B. Vagal nerve stimulation for the treatment of medically refractory epilepsy: A review of the current literature. Neurosurg. Focus 2012, 32, E12. [Google Scholar] [CrossRef] [PubMed]
- Merrill, D.R.; Bikson, M.; Jefferys, J.G.R. Electrical stimulation of excitable tissue: Design of efficacious and safe proto-cols. J. Neurosci. Methods 2005, 141, 171–198. [Google Scholar] [CrossRef]
- Halpern, M.E.; Fallon, J. Current Waveforms for neural stimulation-charge delivery with reduced maximum electrode voltage. IEEE Trans. Biomed. Eng. 2010, 57, 2304–2312. [Google Scholar] [CrossRef] [PubMed]
- Yip, M.; Bowers, P.; Noel, V.; Chandrakasan, A.; Stankovic, K.M. Energy-efficient waveform for electrical stimulation of the cochlear nerve. Sci. Rep. 2017, 7, 1–9. [Google Scholar] [CrossRef]
- Wongsarnpigoon, A.; Woock, J.P.; Grill, W.M. Efficiency analysis of waveform shape for electrical excitation of nerve fibers. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 319–328. [Google Scholar] [CrossRef] [Green Version]
- Sahin, M.; Tie, Y. Non-rectangular waveforms for neural stimulation with practical electrodes. J. Neural Eng. 2007, 4, 227–233. [Google Scholar] [CrossRef]
- Foutz, T.; McIntyre, C.C. Evaluation of novel stimulus waveforms for deep brain stimulation. J. Neural Eng. 2010, 7, 066008. [Google Scholar] [CrossRef] [Green Version]
- Hornig, R.; Eckmiller, R. Optimizing stimulus parameters by modeling multi-electrode electrical stimulation for retina implants. In Proceedings of the 2002 International Joint Conference on Neural Networks, Honolulu, HI, USA, 12–17 May 2002; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2002; Volume 2, pp. 860–865. [Google Scholar]
- Vuckovic, A.; Tosato, M.; Struijk, J.J. A comparative study of three techniques for diameter selective fiber activation in the vagal nerve: Anodal block, depolarizing prepulses and slowly rising pulses. J. Neural Eng. 2008, 5, 275–286. [Google Scholar] [CrossRef]
- Tai, C.; de Groat, W.; Roppolo, J. Simulation of nerve block by high-frequency sinusoidal electrical current based on the Hodgkin-Huxley model. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 415–422. [Google Scholar] [CrossRef] [PubMed]
- Patel, Y.A.; Saxena, T.; Bellamkonda, R.V.; Butera, R. Kilohertz frequency nerve block enhances anti-inflammatory effects of vagus nerve stimulation. Sci. Rep. 2017, 7, 39810. [Google Scholar] [CrossRef] [Green Version]
- Bhadra, N.; Lahowetz, E.A.; Foldes, S.; Kilgore, K. Simulation of high-frequency sinusoidal electrical block of mammalian myelinated axons. J. Comput. Neurosci. 2007, 22, 313–326. [Google Scholar] [CrossRef]
- Cuellar, J.M.; Alataris, K.; Walker, A.; Yeomans, D.C.; Antognini, J.F. Effect of high-frequency alternating current on spinal afferent nociceptive transmission. Neuromodul. Technol. Neural Interface 2012, 16, 318–327. [Google Scholar] [CrossRef] [PubMed]
- Patel, Y.A.; Butera, R.J. Challenges associated with nerve conduction block using kilohertz electrical stimulation. J. Neural Eng. 2018, 15, 031002. [Google Scholar] [CrossRef] [PubMed]
- Joseph, L.; Butera, R.J. High-frequency stimulation selectively blocks different types of fibers in frog sciatic nerve. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 550–557. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Valle, G.; Mazzoni, A.; Iberite, F.; D’Anna, E.; Strauss, I.; Granata, G.; Controzzi, M.; Clemente, F.; Rognini, G.; Cipriani, C.; et al. Biomimetic intraneural sensory feedback enhances sensation naturalness, tactile sensitivity, and manual dexterity in a bidirectional prosthesis. Neuron 2018, 100, 37–45. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Siu, R.; Abbas, J.J.; Hillen, B.K.; Gomes, J.; Coxe, S.; Castelli, J.; Renaud, S.; Jung, R. Restoring ventilatory control using an adaptive bioelectronic system. J. Neurotrauma 2019, 36, 3363–3377. [Google Scholar] [CrossRef]
- Kolbl, F.; Demosthenous, A. A figure of merit for neural electrical stimulation circuits. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2015; Volume 2015, pp. 2075–2078. [Google Scholar]
- Kolbl, F.; N’Kaoua, G.; Naudet, F.; Berthier, F.; Faggiani, E.; Renaud, S.; Benazzouz, A.; Lewis, N. An embedded deep brain stimulator for biphasic chronic experiments in freely moving rodents. IEEE Trans. Biomed. Circuits Syst. 2014, 10, 72–84. [Google Scholar] [CrossRef] [Green Version]
- Sit, J.-J.; Sarpeshkar, R. A low-power blocking-capacitor-free charge-balanced electrode-stimulator chip with less than 6 nA DC error for 1-mA full-scale stimulation. IEEE Trans. Biomed. Circuits Syst. 2007, 1, 172–183. [Google Scholar] [CrossRef] [PubMed]
- Jiang, D.; Demosthenous, A.; Cirmirakis, D.; Perkins, T.A.; Donaldson, N. Design of a stimulator ASIC for an implantable vestibular neural prosthesis. In Proceedings of the 2010 Biomedical Circuits and Systems Conference (BioCAS), Paphos, Cyprus, 3–5 November 2010; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2010; pp. 206–209. [Google Scholar]
- Fang, X.; Wills, J.; Granacki, J.; LaCoss, J.; Arakelian, A.; Weiland, J. Novel charge-metering stimulus amplifier for bio-mimetic implantable prosthesis. In Proceedings of the 2007 IEEE International Symposium on Circuits and Systems, New Orleans, LA, USA, 27–30 May 2007; pp. 569–752. [Google Scholar]
- Williams, I.; Constandinou, T. An energy-efficient, dynamic voltage scaling neural stimulator for a proprioceptive prosthesis. IEEE Trans. Biomed. Circuits Syst. 2013, 7, 129–139. [Google Scholar] [CrossRef] [Green Version]
- Urso, A.; Giagka, V.; van Dongen, M.; Serdijn, W.A. An ultra high-frequency 8-channel neurostimulator circuit with 68% peak power efficiency. IEEE Trans. Biomed. Circuits Syst. 2019, 13, 882–892. [Google Scholar] [CrossRef] [Green Version]
- Shirafkan, R.; Shoaei, O. A power efficient, differential multichannel adiabatic electrode stimulator for deep brain stimulation. Analog. Integr. Circuits Signal Process. 2018, 95, 481–497. [Google Scholar] [CrossRef]
- Krouchev, N.I.; Danner, S.M.; Vinet, A.; Rattay, F.; Sawan, M. Energy-optimal electrical-stimulation pulses shaped by the least-action principle. PLoS ONE 2014, 9, e90480. [Google Scholar] [CrossRef]
- Hasanuzzaman, M.; Motlagh, B.G.; Mounaim, F.; Hassan, A.; Raut, R.; Sawan, M. Toward an Energy-efficient high-voltage compliant visual intracortical multichannel stimulator. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2018, 26, 878–891. [Google Scholar] [CrossRef]
- Jiang, D.; Demosthenous, A. A multichannel high-frequency power-isolated neural stimulator with crosstalk reduction. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 940–953. [Google Scholar] [CrossRef] [PubMed]
- Rapeaux, A.; Constandinou, T. A block-capable and module-extendable 4-channel stimulator for acute neurophysiology. bioRxiv 2020. [Google Scholar] [CrossRef] [PubMed]
- Guan, R.; Emmer, K.M.; Valente, V.; Serdijn, W.A. A power-efficient and safe neural stimulator using ultra-high frequency current pulses for nerve conduction block. In Proceedings of the 2019 IEEE Asia Pacific Conference on Circuits and Systems (APCCAS), Bangkok, Thailand, 11–14 November 2019; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2019; pp. 397–400. [Google Scholar]
- Tala, F.; Johnson, B.C. MEDUSA: A low-cost, 16-Channel neuromodulation platform with arbitrary waveform generation. Electronics 2020, 9, 812. [Google Scholar] [CrossRef]
- Kolbl, F.; Sabatier, J.; N’Kaoua, G.; Naudet, F.; Faggiani, E.; Benazzouz, A.; Renaud, S.; Lewis, N. Characterization of a non linear fractional model of electrode-tissue impedance for neuronal stimulation. In Proceedings of the 2013 IEEE Biomedical Circuits and Systems Conference (BioCAS), Rotterdam, The Netherlands, 31 October–2 November 2013; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2013; pp. 338–341. [Google Scholar]
- Valente, V.; Demosthenous, A.; Bayford, R. A tripolar current-steerin stimulator ASIC for field shaping in deep brain stimulation. IEEE Trans. Biomed. Circuits Syst. 2012, 6, 11. [Google Scholar] [CrossRef] [PubMed]
- Tibar, H.; Naudet, F.; Kölbl, F.; Ribot, B.; Faggiani, E.; N’Kaoua, G.; Renaud, S.; Lewis, N.; Benazzouz, A. In vivo validation of a new portable stimulator for chronic deep brain stimulation in freely moving rats. J. Neurosci. Methods 2020, 333, 108577. [Google Scholar] [CrossRef]
- Thota, A.; Kuntaegowdanahalli, S.; Starosciak, A.K.; Abbas, J.; Orbay, J.; Horch, K.W.; Jung, R. A system and method to interface with multiple groups of axons in several fascicles of peripheral nerves. J. Neurosci. Methods 2015, 244, 78–84. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peña, E.; A Pelot, N.; Grill, W.M. Quantitative comparisons of block thresholds and onset responses for charge-balanced kilohertz frequency waveforms. J. Neural Eng. 2020, 17, 046048. [Google Scholar] [CrossRef] [PubMed]
- Garcia, E.O.; Cumplido, R.; Arias, M. Pipelined CORDIC design on FPGA for a digital sine and cosine waves generator. In Proceedings of the 2006 3rd International Conference on Electrical and Electronics Engineering, Veracruz, Mexico, 6–8 September 2006; pp. 1–4. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Anodic | Cathodic | |
|---|---|---|
| Current Gain | 4.77 (σ = 2.18 × 10−2) | 4.85 (σ = 4.19 × 10−2) |
| Voltage Compliance | 18.3 V | 17.9 V |
| Output Impedance | 5.92 MΩ | 10.1 MΩ |
| (Worst case:1.87 MΩ) | (Worst case: 1.66 MΩ) |
| LUT (%) | Flip Flops (%) | RAM (%) | ||
|---|---|---|---|---|
| Interface/Control | 4507 (15%) | 5424 (21%) | 32 kb (<1%) | |
| Pattern generator | total | 1139 (4%) | 424 (<2%) | 2 Mb (50%) |
| single | 383 (<2%) | 53 (<1%) | 256 kb (6%) | |
| FIFO generator | total | 1800 (6%) | 712 (<3%) | 2 Mb (50%) |
| single | 435 (<2%) | 89 (<1%) | 256 kb (6%) | |
| Sine generator | total | 16,423 (55%) | 8864 (34%) | 0 (0%) |
| single | 724 (<3%) | 277 (1%) | 0 (0%) | |
| Final adder | total | 5184 (17%) | 9728 (37%) | 0 (0%) |
| per channel | 648 (<3%) | 1216 (5%) | 0 (0%) | |
| Channel control | total | 1057 (4%) | 1104 (4%) | 0 (0%) |
| per channel | 134 (<1%) | 138 (<1%) | 0 (0%) | |
| Total | 29,982 (100%) | 26,261 (100%) | 4128 kb (100%) | |
| Device (xc7a100t) | 63,400 (47%) | 126,800 (21%) | 4320 kb (96%) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kolbl, F.; Bornat, Y.; Castelli, J.; Regnacq, L.; N’Kaoua, G.; Renaud, S.; Lewis, N. IC-Based Neuro-Stimulation Environment for Arbitrary Waveform Generation. Electronics 2021, 10, 1867. https://doi.org/10.3390/electronics10151867
Kolbl F, Bornat Y, Castelli J, Regnacq L, N’Kaoua G, Renaud S, Lewis N. IC-Based Neuro-Stimulation Environment for Arbitrary Waveform Generation. Electronics. 2021; 10(15):1867. https://doi.org/10.3390/electronics10151867
Chicago/Turabian StyleKolbl, Florian, Yannick Bornat, Jonathan Castelli, Louis Regnacq, Gilles N’Kaoua, Sylvie Renaud, and Noëlle Lewis. 2021. "IC-Based Neuro-Stimulation Environment for Arbitrary Waveform Generation" Electronics 10, no. 15: 1867. https://doi.org/10.3390/electronics10151867
APA StyleKolbl, F., Bornat, Y., Castelli, J., Regnacq, L., N’Kaoua, G., Renaud, S., & Lewis, N. (2021). IC-Based Neuro-Stimulation Environment for Arbitrary Waveform Generation. Electronics, 10(15), 1867. https://doi.org/10.3390/electronics10151867