Human motion intention recognition technology offers a way to use physical methods, through all kinds of sensor systems, to identify human motion modes and gait divisions. It has important applications in many fields, which has brought widespread interest around the world [
1]. For example, famous scientists have applied human motion intention technology to the development of exoskeletons and soft exo-suits, enabling a cold auxiliary wearable device to recognize the wearer’s motion intention faster and more actively, and cooperate with the wearer in time, so as to help the human wearer to complete tasks in more complex and dangerous environments [
2,
3]. Therefore, it is essential to research more accurate human motion-sensing technology [
3]. Nowadays, the methods used to recognize human motion information mainly include bio-force information (such as joint angle, plantar pressure, joint torque, etc.), video imaging and bioelectrical signals (such as in an electrocardiogram (ECG), electrooculogram (EOG), electromyography (EMG), etc.) [
4,
5,
6,
7]. Biological force information can only reflect the characteristics of human static motion while failing to predict human motion. Force sensors and pose sensors have the advantages of small volume and low power consumption. However, they cannot be directly integrated into the wearer’s body like bioelectrical signal sensors; therefore, users cannot wear them without their feeling like a foreign body, and the recognition rate for motion still needs to be further improved [
4]. Image recognition technology needs specialized field and camera equipment to complete the collation of human motion information; it is usually applied in the context of personnel monitoring [
5]. Some researchers have also attempted to use computer vision technology to detect the wearer’s surroundings and environment as a way to enable wearable devices to recognize road conditions. The authors of [
6] designed a sub-vision system in a knee prosthesis, which provided environmental information for the motion-control system of amputees and reconstructed the visual system circuit, by which the recognition and motion prediction of different road conditions are realized [
6]. A camera was installed on the experimenter’s glasses and knee joint in another study [
7], and Bayesian theory and modern deep neural networks were used to identify different road conditions such as grass and steps [
7]. However, computer vision technology has high requirements in terms of camera accuracy and stability, and the cost of products is still high, whether for research or production. Because of its convenient detection, non-invasive nature, and response ahead of movement (an EMG signal is transmitted 30–150 ms earlier than movement), bioelectrical signals have gradually become the mainstream research object in the field of human–computer interaction [
8,
9]. A surface electromyography (EMG) signal, as the superposition of motor unit action potential in time and space, is a comprehensive effect of EMG and the neural stem on the skin surface, one that can reflect neuromuscular activity to a certain extent [
8]. It is one of the bioelectrical signals that can most easily be obtained [
9,
10]. When the EMG electrode is placed on the skin surface of a human body, it can record the weak potential difference on the skin surface that is caused by muscle contraction; then, the EMG signal for analysis is generated after amplification and running through a conversion circuit. Because the EMG signal is generated before the movement occurs, and it presents different waveforms and periodicity with different motion modes, it offers inherent advantages for motion recognition [
11]. However, the research of human motion recognition based on an EMG signal is still in the preliminary stages, because the EMG signal is weak and difficult to analyze [
11]. Due to the large number of lower limb muscles, some muscles must cooperate to complete a single movement, and one muscle can also perform different joint movements (such as the gastrocnemius participating in both knee flexion and ankle plantar flexion) [
12]. Therefore, the optimal combination of lower limb skeletal muscle, which can best reflect the joint movement, is also one of the methods to improve movement intention recognition.
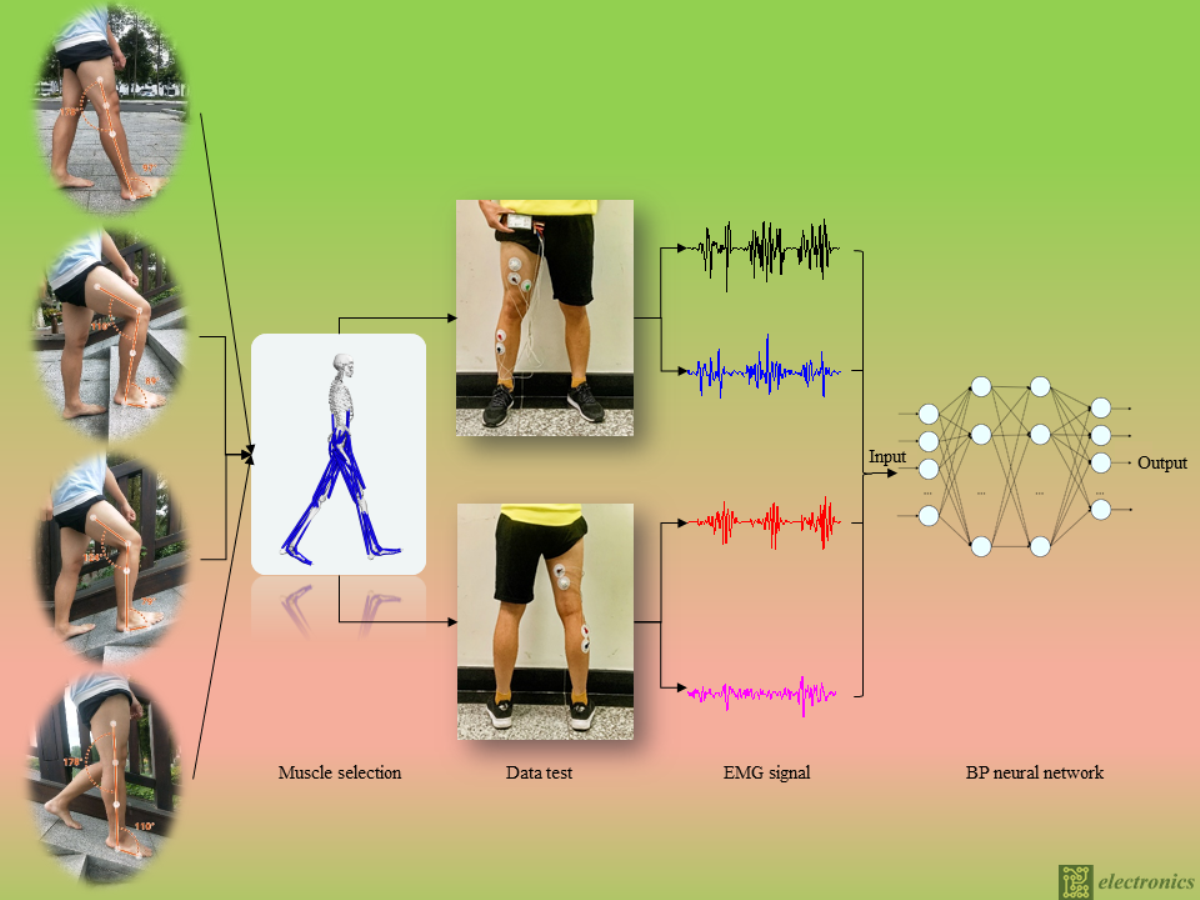
We proceeded as follows to select the appropriate muscles to measure EMG signals and to verify their feasibility for identifying different lower-limb movements. Firstly, the data for the length change of lower limb muscles in the process of gait movement were obtained using the OpenSim musculoskeletal simulation software. Then, SPSS was utilized to analyze the correlations among those data, the selected muscles (including the rectus femoris, biceps femoris, tibialis anterior muscle and gastrocnemius) being related to lower limb movement but irrespective of length change. In
Section 2, IMU and EMG sensors were applied to collect the angle data and EMG data during exercise. After de-noising and feature extraction in
Section 3, the signals are devoted to identifying seven kinds of slopes, five kinds of gait, and four kinds of movements. This paper’s structure is shown in
Figure 1.
In the existing research on lower limb movement classification by EMG signals, when concluding the experiment, the methods used for selecting muscles are mostly based on the distribution position of human muscles or on the convenience of collection by researchers [
12,
13,
14]. Although the results are still objective, they lack a certain scientific basis. Therefore, the contributions of this paper are summarized as follows. (1) We registered the changes in data of muscle length during gait movement according to OpenSim. To reduce the interaction and redundancy between various EMG signals, the principles of statistical mathematics and human anatomy are innovatively used to select those muscles with low correlation in the process of movement from numerous muscles of the lower limbs. (2) The correctness of muscle selection is verified by the use of a BP neural network. To make the results universal, we divided the proportions of the training set and test set into 95%/5%, 90%/10%, 85%/15%, 80%/20%, 75%/25%, and 70%/30%.
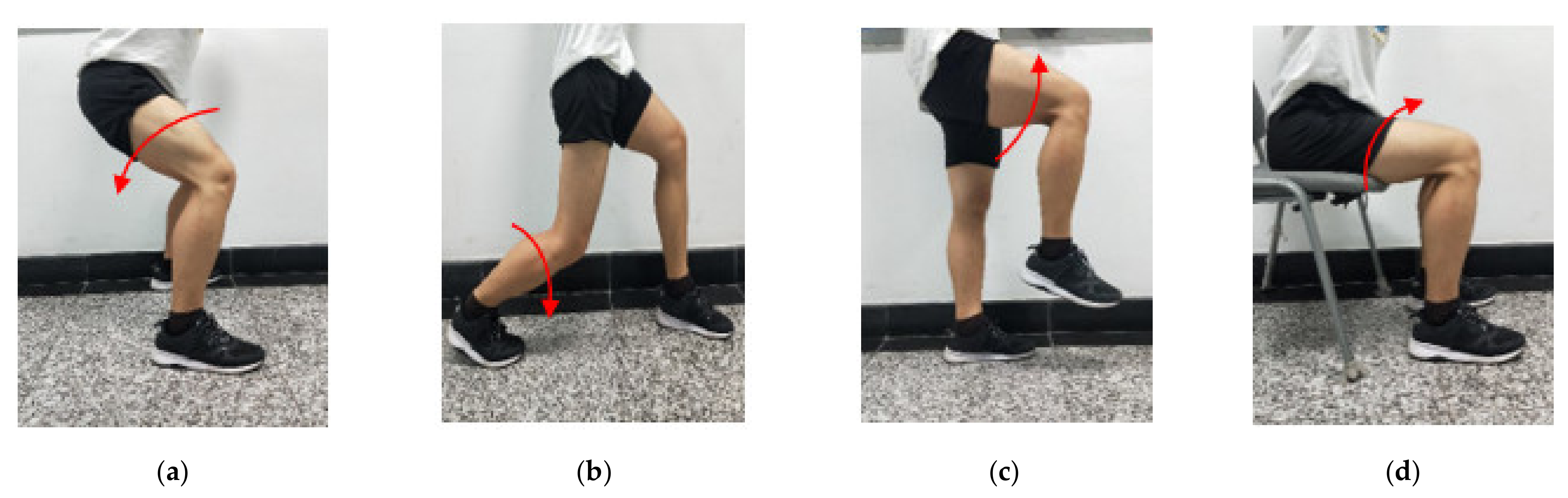
The road slopes, different gaits and lower limb movements selected in this paper are commonly found in work and life, and can be used for mutual verification of the muscle selection method and pattern recognition. The research results help to identify the states of movement of human beings and predict human movement intention, so as to achieve efficient and safe operation at work and at home.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}