
Research on Energy Management Strategy of Electric Vehicle Hybrid System Based on Reinforcement Learning

Abstract
:1. Introduction
2. Overall Modeling of the Electric Power System
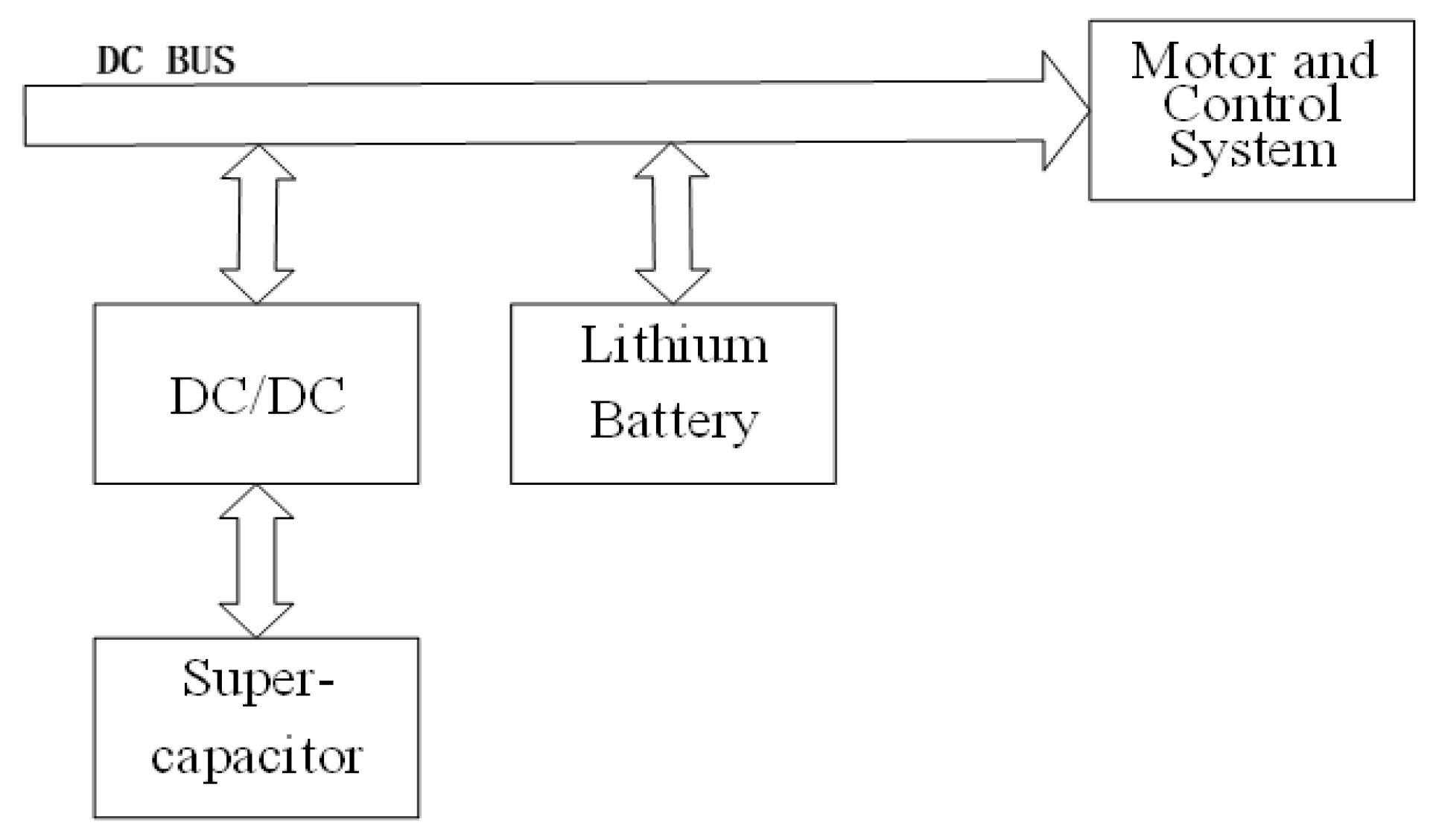
2.1. Overall Structure of Electric Vehicle Power System
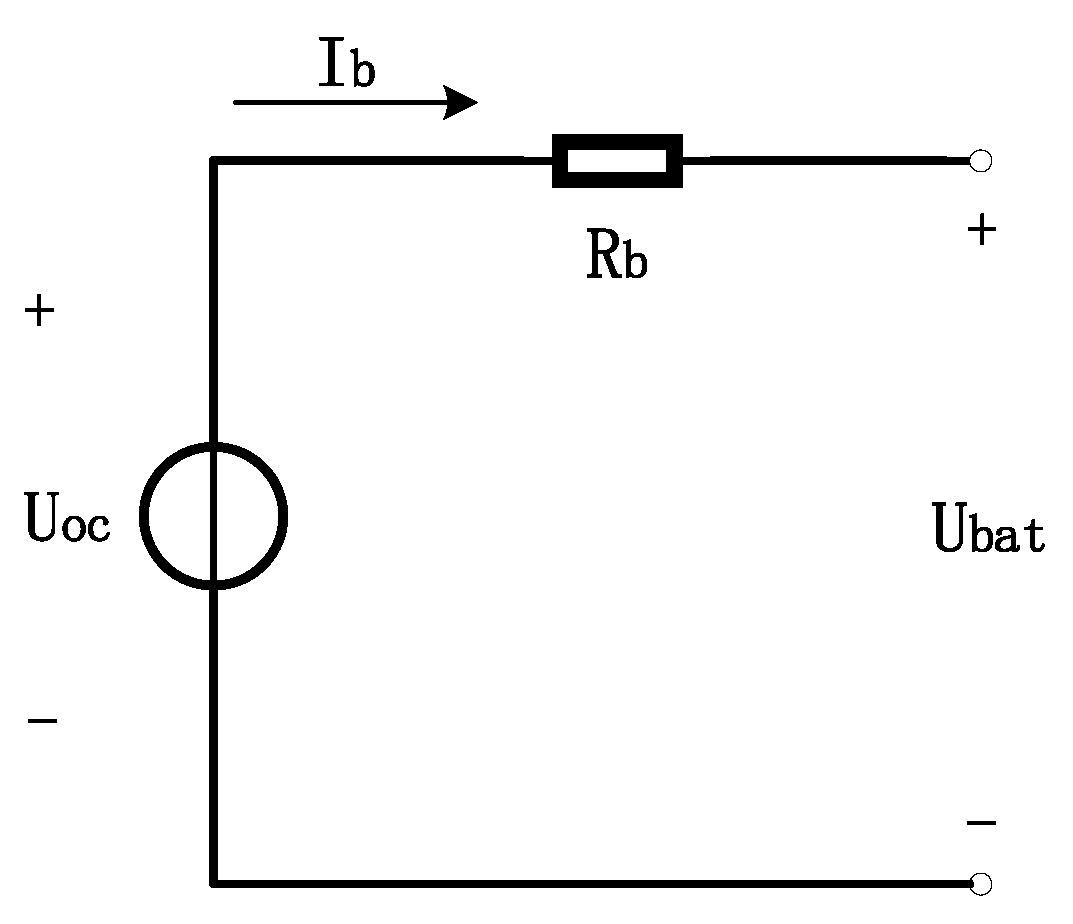
2.2. Lithium Battery Equivalent Circuit and Model Building
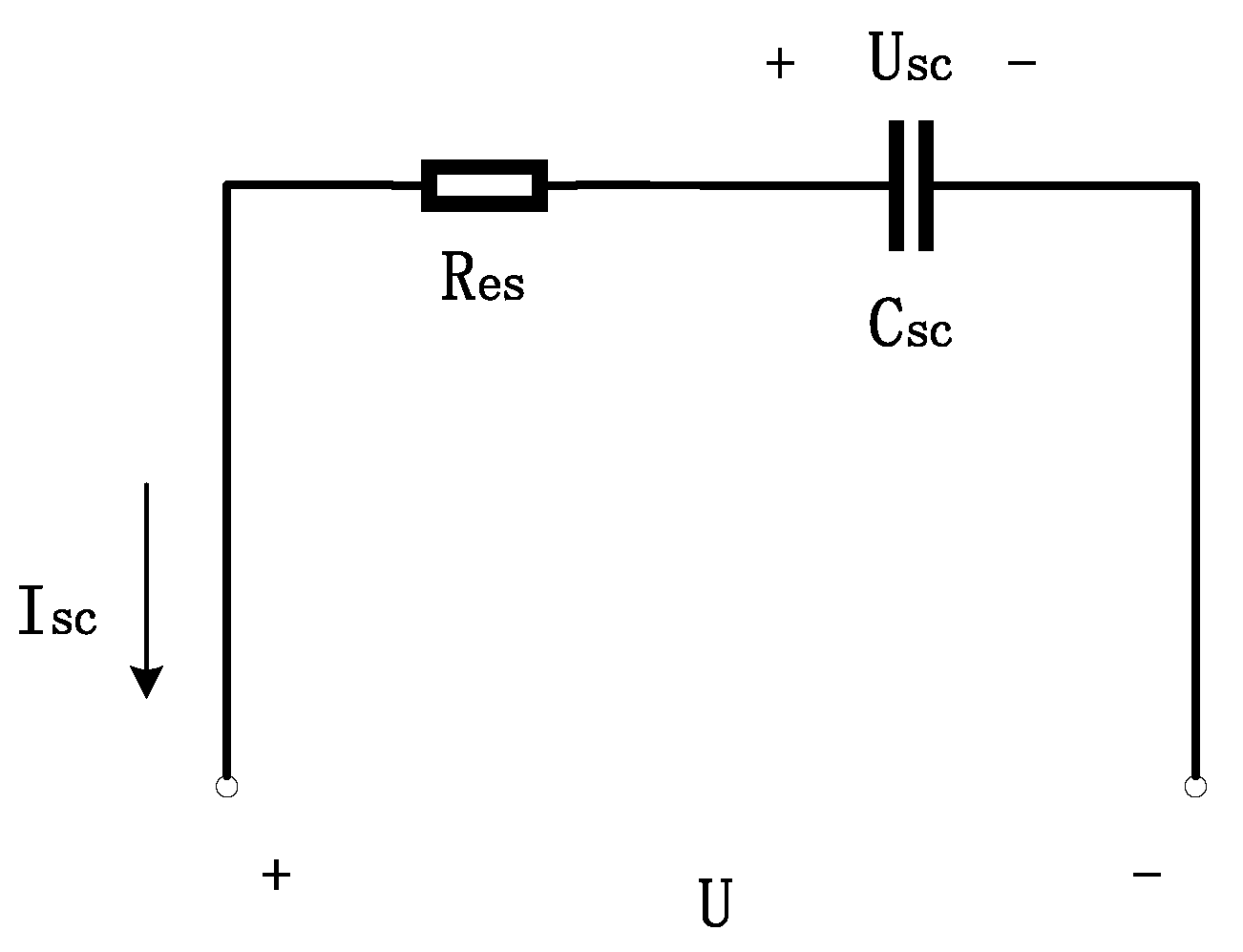
2.3. Supercapacitor Equivalent Circuit and Model Building
3. Optimization Objective Function Design
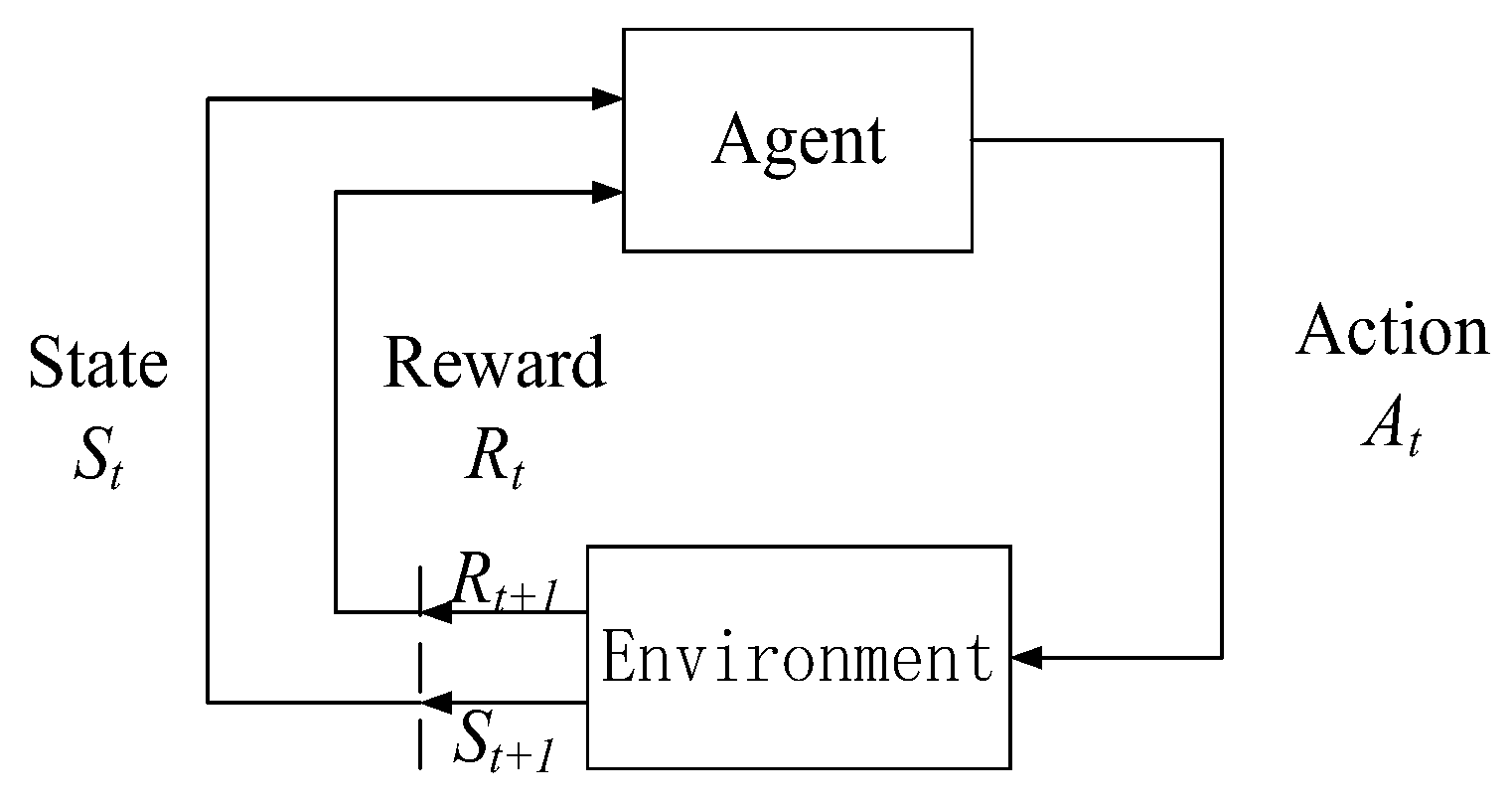
4. Energy Management Strategy Based on Reinforcement Learning Algorithm
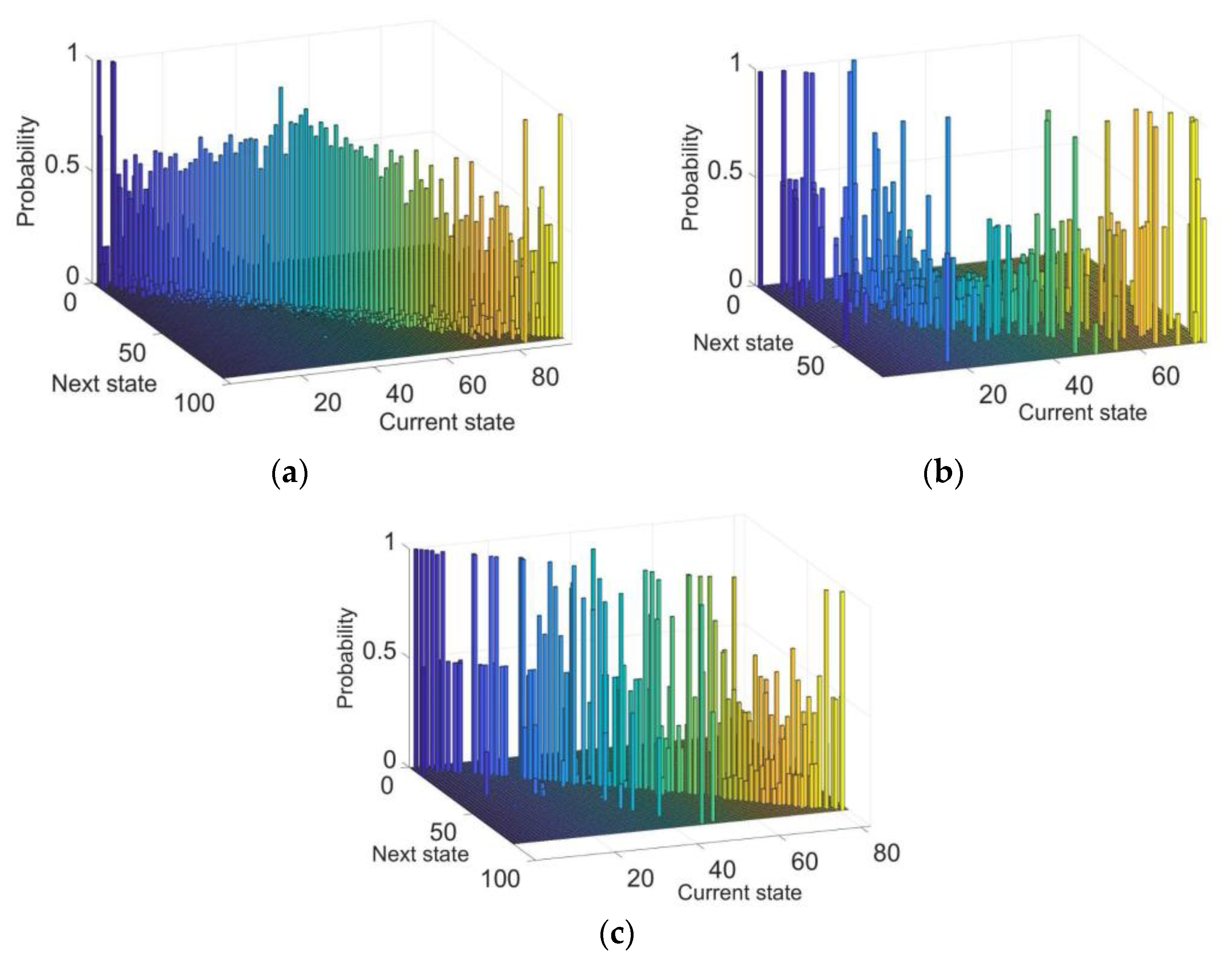
4.1. Transition Probability Matrix
4.2. Q-Learning-Based EMS
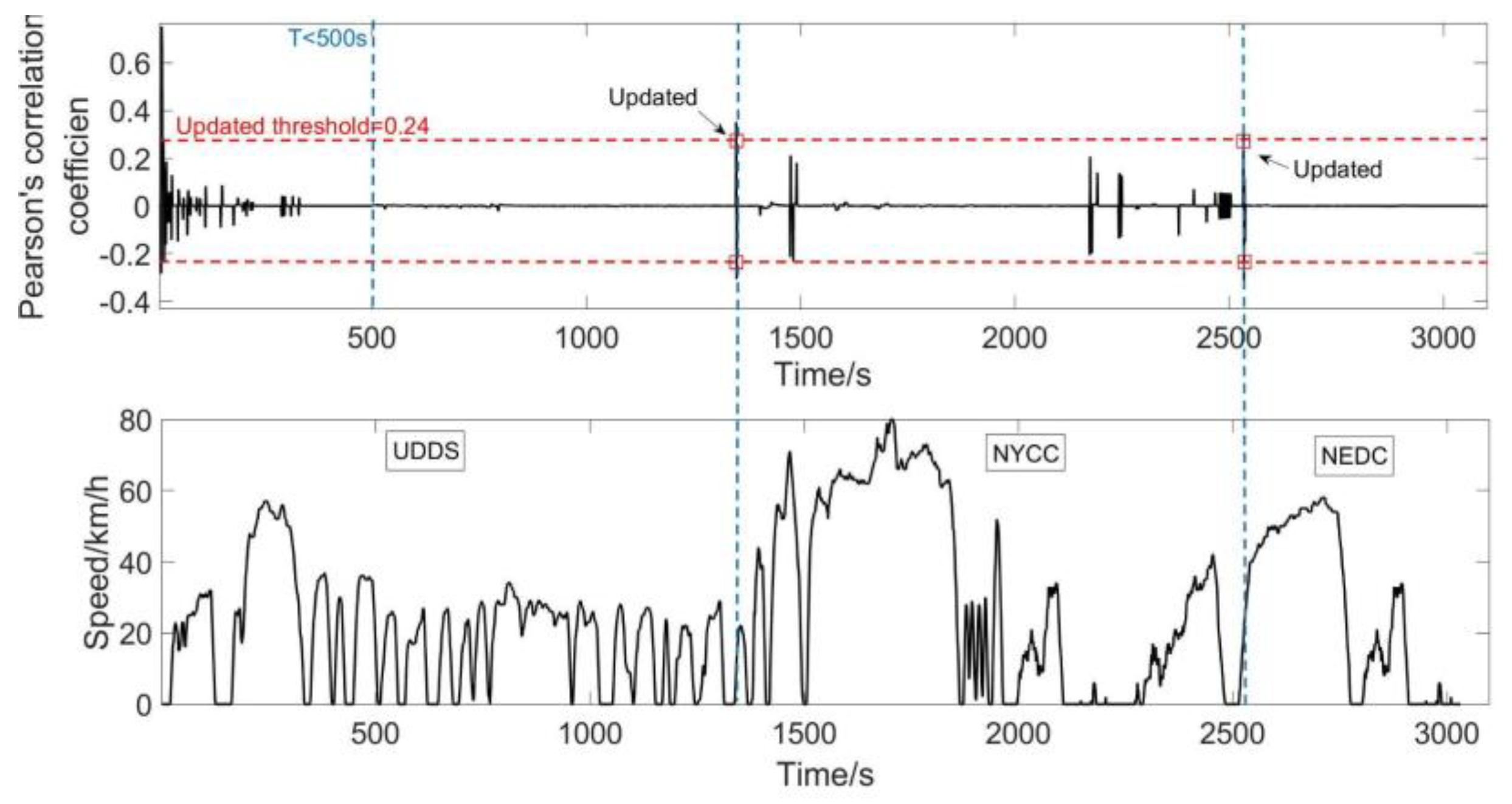
4.3. Online Update of the Demand Power State Transition Probability Matrix
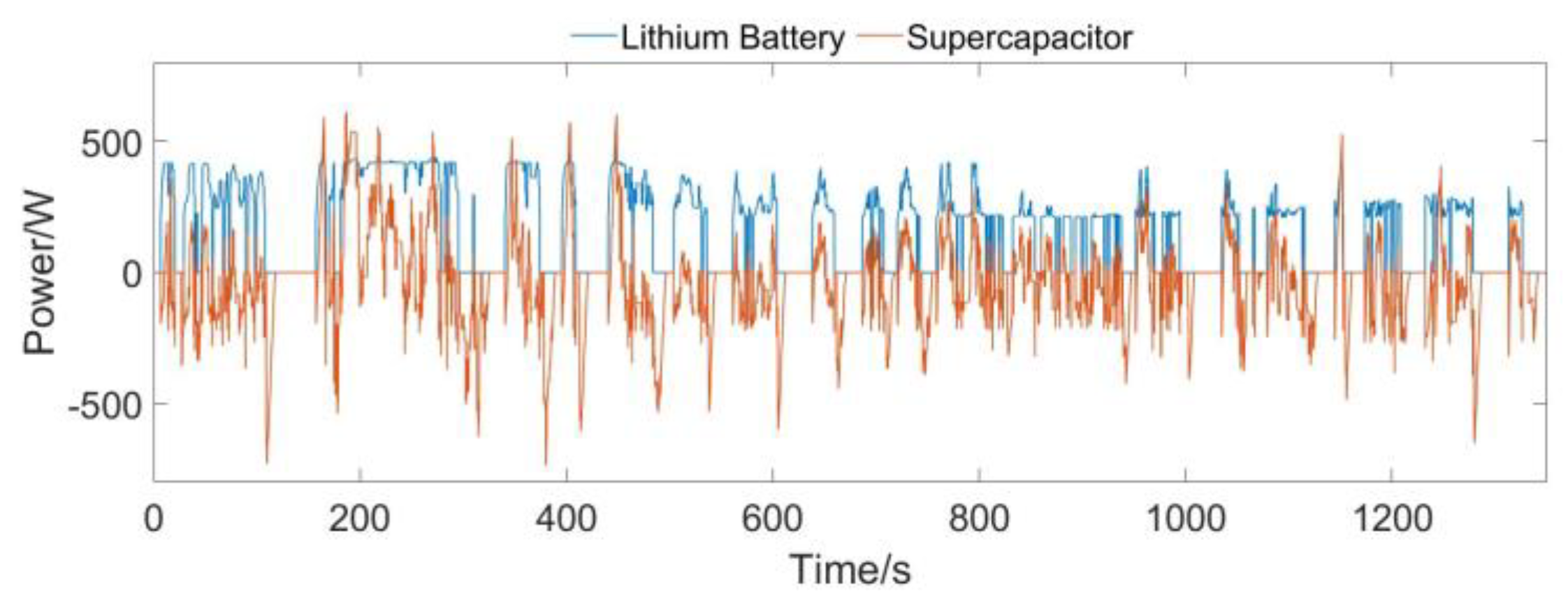
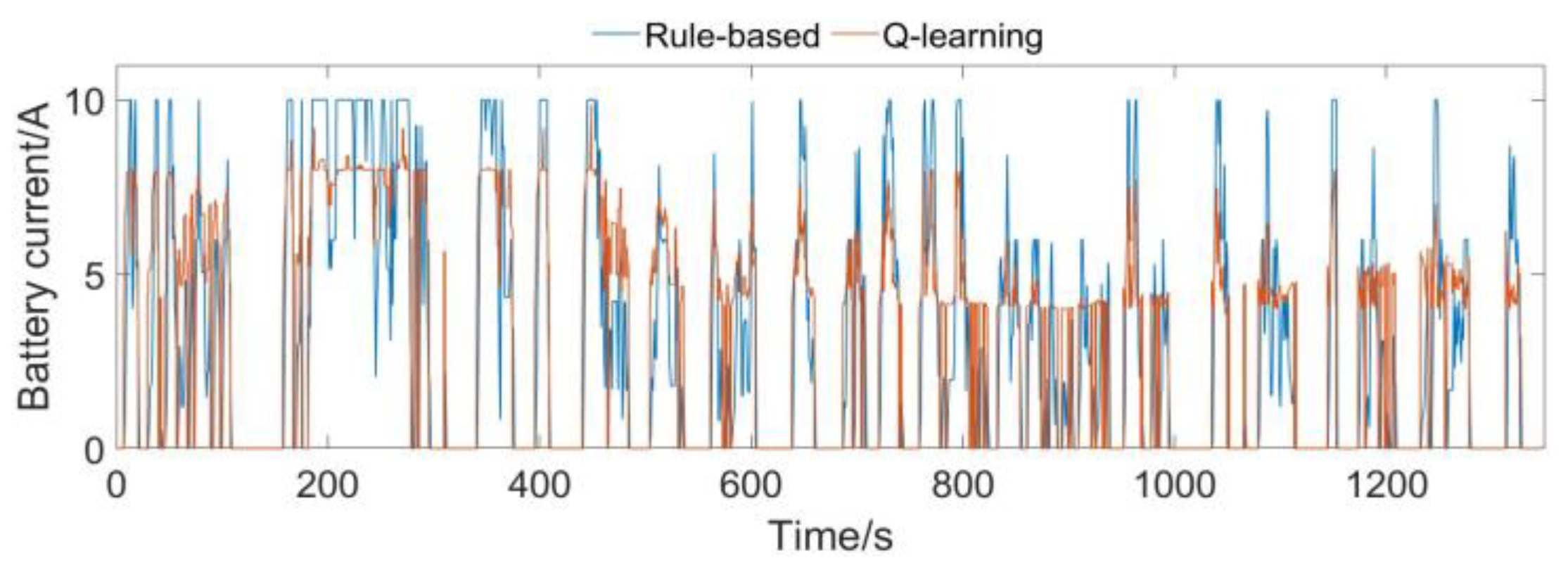
5. Simulation and Analysis of Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sulaiman, N.; Hannan, M.; Mohamed, A.; Majlan, E.; Daud, W.W. A review on energy management system for fuel cell hybrid electric vehicle: Issues and challenges. Renew. Sustain. Energy Rev. 2015, 52, 802–814. [Google Scholar] [CrossRef]
- Du, G.; Zou, Y.; Zhang, X.; Kong, Z.; Wu, J.; He, D. Intelligent energy management for hybrid electric tracked vehicles using online reinforcement learning. Appl. Energy 2019, 251, 113388. [Google Scholar] [CrossRef]
- Busoniu, L.; Babuska, R.; De Schutter, B. A Comprehensive Survey of Multiagent Reinforcement Learning. IEEE Trans. Syst. 2008, 38, 156–172. [Google Scholar] [CrossRef] [Green Version]
- Lin, X.; Wang, Y.; Bogdan, P.; Chang, N.; Pedram, M. Reinforcement learning based power management for hybrid electric vehicles. In Proceedings of the 2014 IEEE/ACM International Conference on Computer-Aided Design (ICCAD), San Jose, CA, USA, 2–6 November 2014; pp. 33–38. [Google Scholar] [CrossRef]
- Liu, T.; Zou, Y.; Liu, D.; Sun, F. Reinforcement Learning–Based Energy Management Strategy for a Hybrid Electric Tracked Vehicle. Energies 2015, 8, 7243–7260. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; He, H.; Peng, J.; Li, Y.; Li, Z. Continuous reinforcement learning of energy management with deep Q network for a power split hybrid electric bus. Appl. Energy 2018, 222, 799–811. [Google Scholar] [CrossRef]
- Lin, X.; Xia, Y. Energy management control strategy for plug-in fuel cell electric vehicle based on reinforcement learning algorithm. Chin. J. Eng. 2019, 41, 1332–1341. [Google Scholar]
- Han, X.; He, H.; Wu, J.; Peng, J.; Li, Y. Energy management based on reinforcement learning with double deep Q-learning for a hybrid electric tracked vehicle. Appl. Energy 2019, 254, 113708. [Google Scholar] [CrossRef]
- Li, Y.; He, H.; Peng, J.; Wang, H. Deep Reinforcement Learning-Based Energy Management for a Series Hybrid Electric Vehicle Enabled by History Cumulative Trip Information. IEEE Trans. Veh. Technol. 2019, 68, 7416–7430. [Google Scholar] [CrossRef]
- Liu, T.; Wang, B.; Yang, C. Online Markov Chain-based energy management for a hybrid tracked vehicle with speedy Q-learning. Energy 2018, 160, 544–555. [Google Scholar] [CrossRef]
- Xiong, R.; Cao, J.; Yu, Q. Reinforcement learning-based real-time power management for hybrid energy storage system in the plug-in hybrid electric vehicle. Appl. Energy 2018, 211, 538–548. [Google Scholar] [CrossRef]
- Liu, T.; Zou, Y.; Liu, D.; Sun, F. Reinforcement Learning of Adaptive Energy Management With Transition Probability for a Hybrid Electric Tracked Vehicle. IEEE Trans. Ind. Electron. 2015, 62, 7837–7846. [Google Scholar] [CrossRef]
- Liu, T.; Tang, X.; Hu, X.; Tan, W.; Zhang, J. Human-like Energy Management Based on Deep Reinforcement Learning and Historical Driving Experiences. arXiv 2020, arXiv:2007.10126. [Google Scholar]
- Partridge, P.W.J.; Bucknall, R. Cost-effective reinforcement learning energy management for plug-in hybrid fuel cell and battery ships. Appl. Energy 2020, 275, 115258. [Google Scholar]
- Hasanvand, S.; Rafiei Foroushani, M.; Gheisarnejad, M.; Khooban, M.H. Reliable Power Scheduling of an Emission-Free Ship: Multi-Objective Deep Rein-forcement Learning. IEEE Trans. Transp. Electrif. 2020, 6, 832–843. [Google Scholar] [CrossRef]
- Qi, X.; Wu, G.; Boriboonsomsin, K.; Barth, M.J.; Gonder, J. Data-driven reinforcement learning–based real-time energy management system for plug-in hybrid electric vehicles. J. Transp. Res. Board 2015, 2572, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Lin, X.; Zhou, B.; Xia, Y. Online Recursive Power Management Strategy based on the Reinforcement Learning Algorithm with Cosine Similarity and a Forgetting Factor. IEEE Trans. Ind. Electron. 2020, 68, 5013–5023. [Google Scholar] [CrossRef]
- Xiong, R.; Chen, H.; Wang, C.; Sun, F. Towards a smarter hybrid energy storage system based on battery and ultracapacitor-A critical review on topology and energy management. J. Clean. Prod. 2018, 202, 1228–1240. [Google Scholar] [CrossRef]
- Meng, X.; Li, Q.; Zhang, G.; Wang, X.; Chen, W. Double Q-learning-based Energy Management Strategy for Overall Energy Consumption Optimization of Fuel Cell/Battery Vehicle. In Proceedings of the 2021 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 21–25 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, G.; Li, Q.; Chen, W.; Meng, X.; Deng, H. A coupled power-voltage equilibrium strategy based on droop control for fuel cell/battery/supercapacitor hybrid tramway. Int. J. Hydrog. Energy 2019, 44, 19370–19383. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | Value |
|---|---|---|
| Lithium battery | Rated Capacity/Ah | 40 |
| Rated voltage/V | 48 | |
| Internal resistance/mΩ | 12 | |
| Supercapacitor | Rated Capacity/F | 165 |
| Rated voltage/V | 48.6 | |
| Internal resistance/mΩ | 6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Y.; Xu, G.; Chen, Q. Research on Energy Management Strategy of Electric Vehicle Hybrid System Based on Reinforcement Learning. Electronics 2022, 11, 1933. https://doi.org/10.3390/electronics11131933
Cheng Y, Xu G, Chen Q. Research on Energy Management Strategy of Electric Vehicle Hybrid System Based on Reinforcement Learning. Electronics. 2022; 11(13):1933. https://doi.org/10.3390/electronics11131933
Chicago/Turabian StyleCheng, Yu, Ge Xu, and Qihong Chen. 2022. "Research on Energy Management Strategy of Electric Vehicle Hybrid System Based on Reinforcement Learning" Electronics 11, no. 13: 1933. https://doi.org/10.3390/electronics11131933
APA StyleCheng, Y., Xu, G., & Chen, Q. (2022). Research on Energy Management Strategy of Electric Vehicle Hybrid System Based on Reinforcement Learning. Electronics, 11(13), 1933. https://doi.org/10.3390/electronics11131933