
Cooperative Localization Based on Augmented State Belief Propagation for Mobile Agent Networks



Abstract
:1. Introduction
2. System Model and Problem Formulation
3. Centralized Fusion
4. BP-Based Cooperative Localization
5. Augmented State BP Cooperative Localization
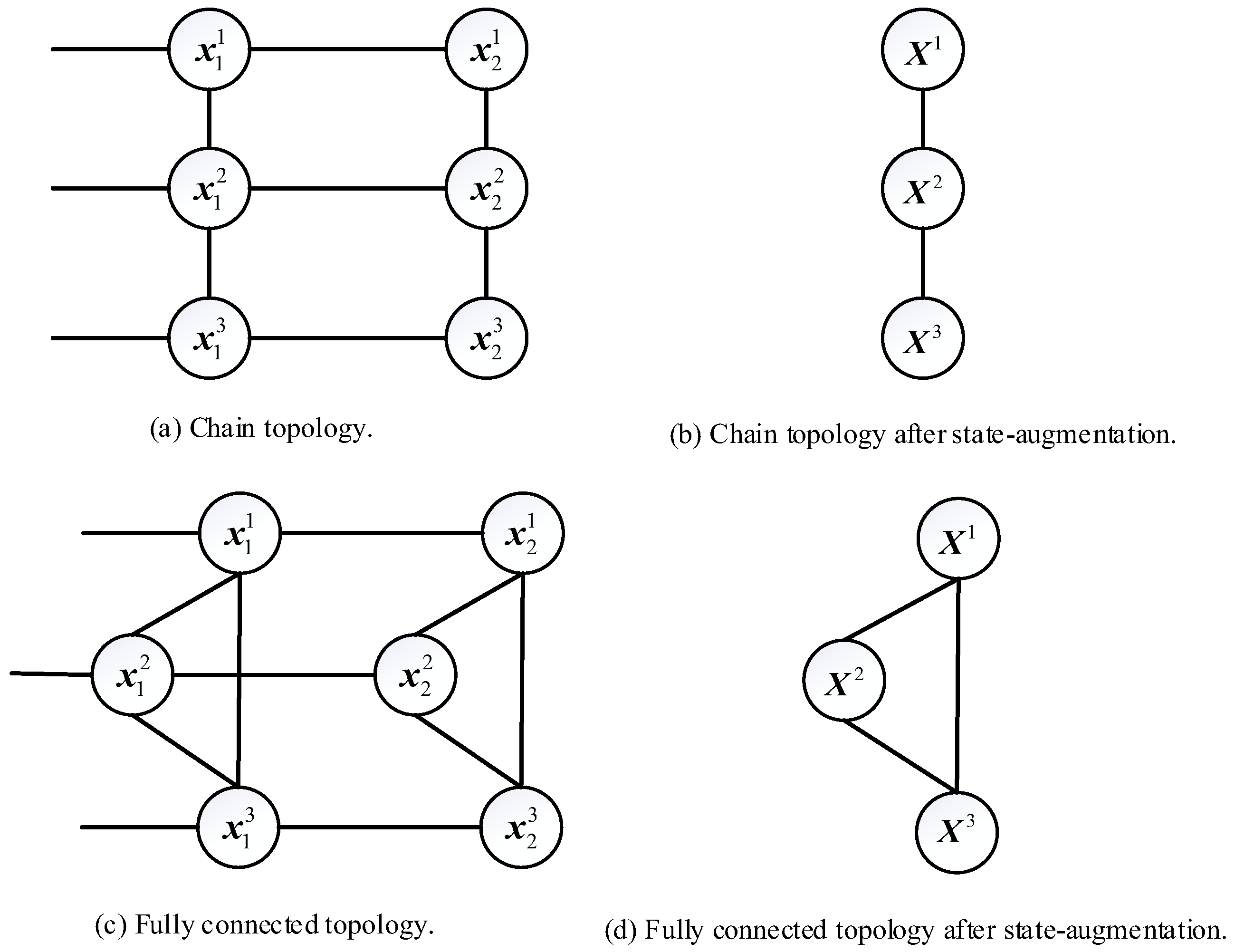
5.1. Motivation
5.2. Augmented State BP (AS-BP) Algorithm
| Algorithm 1 AS-BP algorithm. |
| Start with , , and compute at each agent : Step 1. Calculate the prediction message as in Equations (23)–(27). Step 2. Calculate the belief : 1: for do 2: Calculate the message as in Equations (29)–(31) and its initial value is set to . 3: Send and to its neighbor agent . 4: Receive and , . 5: Calculate the belief as in Equations (29)–(31) but it is a little different, that is . 6: end for |
5.3. Computation and Communication Overhead
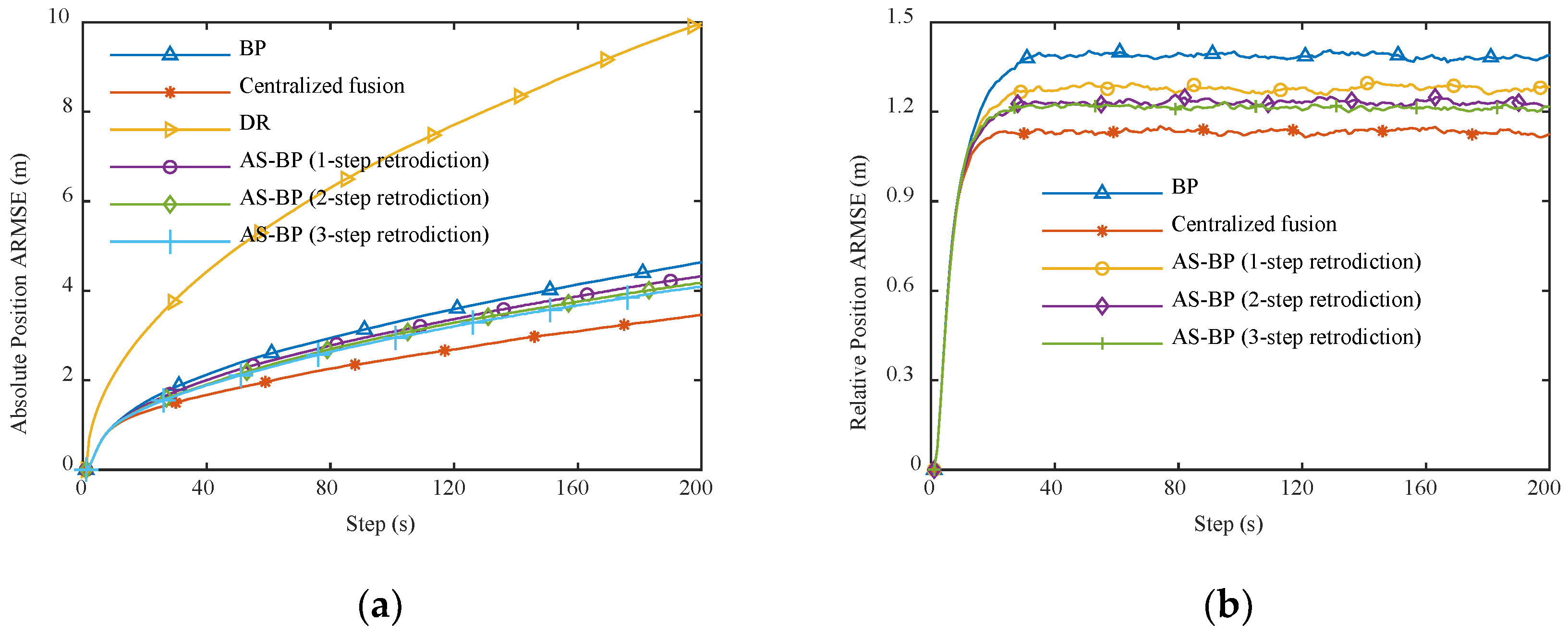
6. Illustrative Examples
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, K.; Lim, H.B.; Frazzoli, E.; Ji, H.; Lee, V.C.S. Improving positioning accuracy using GPS pseudorange measurements for cooperative vehicular localization. IEEE Trans. Veh. Technol. 2014, 63, 2544–2556. [Google Scholar] [CrossRef]
- Sun, G.; Zhou, R.; Xu, K.; Weng, Z.; Zhang, Y.; Dong, Z.; Wang, Y. Cooperative formation control of multiple aerial vehicles based on guidance route in a complex task environment. Chin. J. Aeronaut. 2020, 33, 701–720. [Google Scholar] [CrossRef]
- Ahmad, A.; Lawless, G.; Lima, P. An online scalable approach to unified multirobot cooperative localization and object tracking. IEEE Trans. Robot. 2017, 33, 1184–1199. [Google Scholar] [CrossRef]
- Roman, R.C.; Precup, R.E.G.; Petriu, E.M. Hybrid data-driven fuzzy active disturbance rejection control for tower crane systems. Eur. J. Control 2021, 58, 373–387. [Google Scholar] [CrossRef]
- Chi, R.H.; Li, H.Y.; Shen, D.; Hou, Z.; Huang, B. Enhanced P-type Control: Indirect Adaptive Learning from Set-point Updates. IEEE Trans. Autom. Control 2022. [Google Scholar] [CrossRef]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV navigation and localization: A review. IEEE J. Ocean. Eng. 2014, 39, 1184–1199. [Google Scholar] [CrossRef]
- Roumeliotis, S.I.; Bekey, G.A. Distributed multirobot localization. IEEE Trans. Robot. Autom. 2002, 18, 781–795. [Google Scholar] [CrossRef] [Green Version]
- Shen, Y.; Wymeersch, H.; Win, M.Z. Fundamental limits of wideband localization-part II: Cooperative networks. IEEE Trans. Inf. Theory 2010, 56, 4981–5000. [Google Scholar] [CrossRef] [Green Version]
- Zhai, G.; Zhang, J.; Zhou, Z. Coordinated target localization base on pseudo measurement for clustered space robot. Chin. J. Aeronaut. 2013, 26, 1524–1533. [Google Scholar] [CrossRef] [Green Version]
- Wymeersch, H.; Lien, J.; Win, M.Z. Cooperative localization in wireless networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Nguyen, T.V.; Jeong, Y.; Shin, H.; Win, M.Z. Least square cooperative localization. IEEE Trans. Veh. Technol. 2015, 64, 1318–1330. [Google Scholar] [CrossRef]
- Ouyang, R.W.; Wong, A.K.S.; Lea, C.T. Received signal strength-based wireless localization via semidefinite programming: Noncooperative and cooperative schemes. IEEE Trans. Veh. Technol. 2010, 59, 1307–1318. [Google Scholar] [CrossRef]
- Vaghefi, R.M.; Buehrer, R.M. Cooperative joint synchronization and localization in wireless sensor networks. IEEE Trans. Signal Process. 2015, 63, 3615–3627. [Google Scholar] [CrossRef]
- Pearl, J. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference; Morgan Kaufmann: San Mateo, CA, USA, 1988. [Google Scholar]
- Wainwright, M.J.; Jaakkola, T.S.; Willsky, A.S. Tree-based reparameterization framework for analysis of sum-product and related algorithms. IEEE Trans. Inf. Theory 2003, 49, 1120–1146. [Google Scholar] [CrossRef] [Green Version]
- Su, Q.; Wu, Y.C. Convergence analysis of the variance in Gaussian belief propagation. IEEE Trans. Veh. Technol. 2014, 62, 5119–5131. [Google Scholar] [CrossRef] [Green Version]
- Yuan, W.; Wu, N.; Etzlinger, B.; Wang, H.; Kuang, J. Cooperative joint localization and clock synchronization based on Gaussian message passing in asynchronous wireless networks. IEEE Trans. Veh. Technol. 2016, 65, 7258–7273. [Google Scholar] [CrossRef] [Green Version]
- Sudderth, E.B.; Ihler, A.T.; Freeman, W.T.; Willsky, A.S. Nonparametric belief propagation. In Proceedings of the 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Madison, WI, USA, 18–20 June 2003; pp. I-605–I-612. [Google Scholar]
- Ihler, A.T.; Fisher, J.W.; Moses, R.L.; Willsky, A.S. Nonparametric belief propagation for self-localization of sensor networks. IEEE J. Sel. Areas Commun. 2005, 23, 809–819. [Google Scholar] [CrossRef] [Green Version]
- Ihler, A.T.; Sudderth, E.B.; Freeman, W.T.; Willsky, A. Efficient multiscale sampling from products of Gaussian mixtures. In Proceedings of the 17th Annual Conference on Neural Information Processing Systems (NIPS), Vancouver, BC, Canada, 13–18 December 2004; pp. 1–8. [Google Scholar]
- Savic, V.; Zazo, S. Reducing communication overhead for cooperative localization using nonparametric belief propagation. IEEE Wirel. Commun. Lett. 2012, 1, 308–311. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Wang, Y.; Yu, W.; Guan, X. Multiple autonomous underwater vehicle cooperative localization in anchor-free environments. IEEE J. Ocean. Eng. 2019, 44, 895–911. [Google Scholar] [CrossRef]
- Garcia-Fernandez, A.F.; Svensson, L.; Sarkka, S. Cooperative localization using posterior linearization belief propagation. IEEE Trans. Veh. Technol. 2018, 67, 832–836. [Google Scholar] [CrossRef]
- Meyer, F.; Hlinka, O.; Hlawatsch, F. Sigma point belief propagation. IEEE Signal Process. Lett. 2014, 21, 145–149. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Hedley, M.; Collings, I.B. New efficient indoor cooperative localization algorithm with empirical ranging error model. IEEE J. Sel. Areas Commun. 2015, 33, 1407–1417. [Google Scholar] [CrossRef]
- Georges, H.M.; Xiao, Z.; Wang, D. Hybrid cooperative vehicle positioning using distributed randomized sigma point belief propagation on non-Gaussian noise distribution. IEEE Sens. J. 2016, 16, 7803–7813. [Google Scholar] [CrossRef]
- Kschischang, F.R.; Frey, B.J.; Loeliger, H.A. Factor graphs and the sum-product algorithm. IEEE Trans. Inf. Theory 2001, 47, 498–519. [Google Scholar] [CrossRef] [Green Version]
- Barooah, P.; Russell, W.J.; Hespanha, J.P. Approximate distributed Kalman filtering for cooperative multi-agent localization. In Proceedings of the 6th IEEE International Conference on Distributed Computing in Sensor Systems, Santa Barbara, CA, USA, 21–23 June 2010; pp. 102–115. [Google Scholar]
- Li, X.R.; Zhu, Y.M.; Wang, J.; Han, C. Optimal linear estimation fusion—Part I: Unified fusion rules. IEEE Trans. Inf. Theory 2003, 49, 2192–2208. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory, Algorithms and Software; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Gao, Y.X.; Li, X.R. Optimal linear fusion of smoothed state estimates. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1236–1248. [Google Scholar]
- Li, X.R. Recursibility and optimal linear estimation and filtering. In Proceedings of the 43rd IEEE Conference on Decision and Control, Nassau, The Bahamas, 14–17 December 2004; pp. 1761–1766. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| BP | AS-BP (1-Step Retrodiction) | AS-BP (2-Step Retrodiction) | AS-BP (3-Step Retrodiction) |
|---|---|---|---|
| 1.0000 | 1.6697 | 2.2094 | 2.8575 |
| BP | AS-BP (1-Step Retrodiction) | AS-BP (2-Step Retrodiction) | AS-BP (3-Step Retrodiction) |
|---|---|---|---|
| 1.0000 | 2.1122 | 3.7309 | 5.4305 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Gao, G.; Gao, Y. Cooperative Localization Based on Augmented State Belief Propagation for Mobile Agent Networks. Electronics 2022, 11, 1959. https://doi.org/10.3390/electronics11131959
Zhang B, Gao G, Gao Y. Cooperative Localization Based on Augmented State Belief Propagation for Mobile Agent Networks. Electronics. 2022; 11(13):1959. https://doi.org/10.3390/electronics11131959
Chicago/Turabian StyleZhang, Bolun, Guangen Gao, and Yongxin Gao. 2022. "Cooperative Localization Based on Augmented State Belief Propagation for Mobile Agent Networks" Electronics 11, no. 13: 1959. https://doi.org/10.3390/electronics11131959
APA StyleZhang, B., Gao, G., & Gao, Y. (2022). Cooperative Localization Based on Augmented State Belief Propagation for Mobile Agent Networks. Electronics, 11(13), 1959. https://doi.org/10.3390/electronics11131959