
Adaptive Cruise Predictive Control Based on Variable Compass Operator Pigeon-Inspired Optimization


Abstract
:1. Introduction
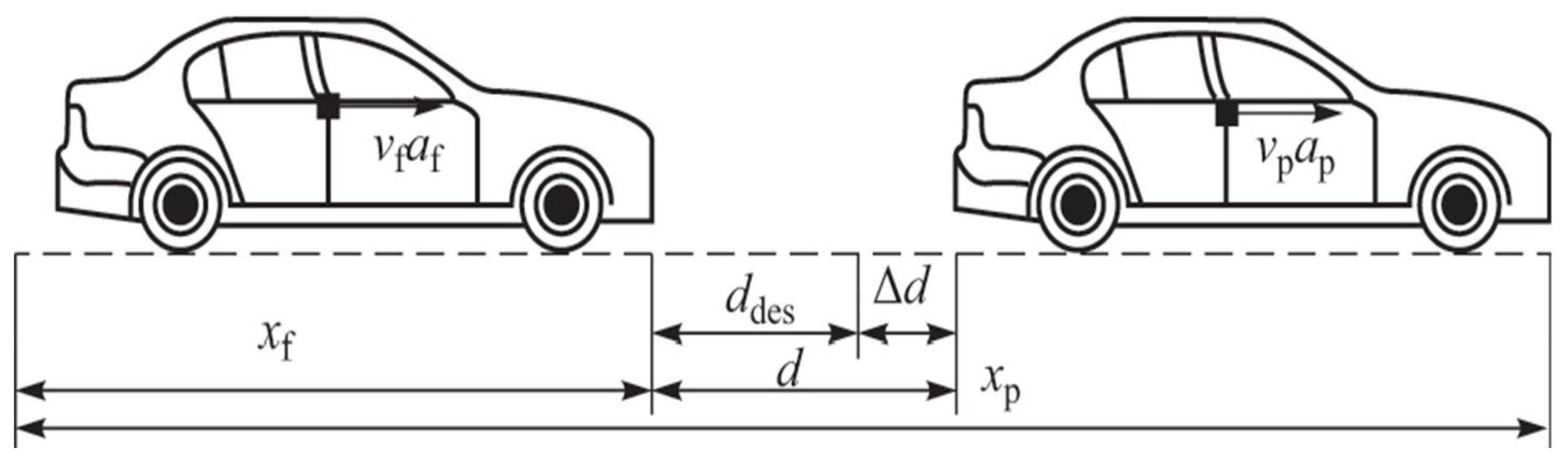
2. Longitudinal Kinematic Model of Adaptive Cruise
3. Multi-Objective Adaptive Cruise Predictive Control Algorithm
Prediction Control Algorithm
4. Predictive Control Law Based on Variable Compass Operator PIO
4.1. Pigeon-Inspired Algorithm
- Map and compass operator. Pigeons can sense the geomagnetic field and then form a map in their mind. They use the sun’s altitude as a compass to adjust their flight direction, and as they approach their destination, their dependence on the sun and magnetic field decreases.
- Landmark operator. The landmark operator is used to simulate the effect of landmarks on pigeons in the navigation tool. As pigeons approach their destination, they will rely more on nearby landmarks. If the pigeons are familiar with the landmarks, they will fly directly to the destination. Otherwise, they will follow those pigeons that are familiar with the landmarks.
4.2. Adaptive Cruise Prediction Control Law Based on Variable Compass Operator PIO
- At the moment , real-time sampling is used to obtain the adaptive cruise system’s input and state variables;
- Determine the objective function and constraints by calculating , , ;
- Use the variable compass operator pigeon-inspired algorithm to calculate the new control sequence;
- Repeat step 2 and step 3 to find the optimal control sequence that satisfies the requirements;
- Choose the first component of as the control input increment and update the optimal control value ;
- Let and return to step 1.
5. Particle Swarm Optimization
- Initialize all particles;
- Update the velocity and position according to Formula (10), where ;
- Evaluate the fitness value;
- Update the historical optimal position of each other particle;
- Update the global optimal location of the group.
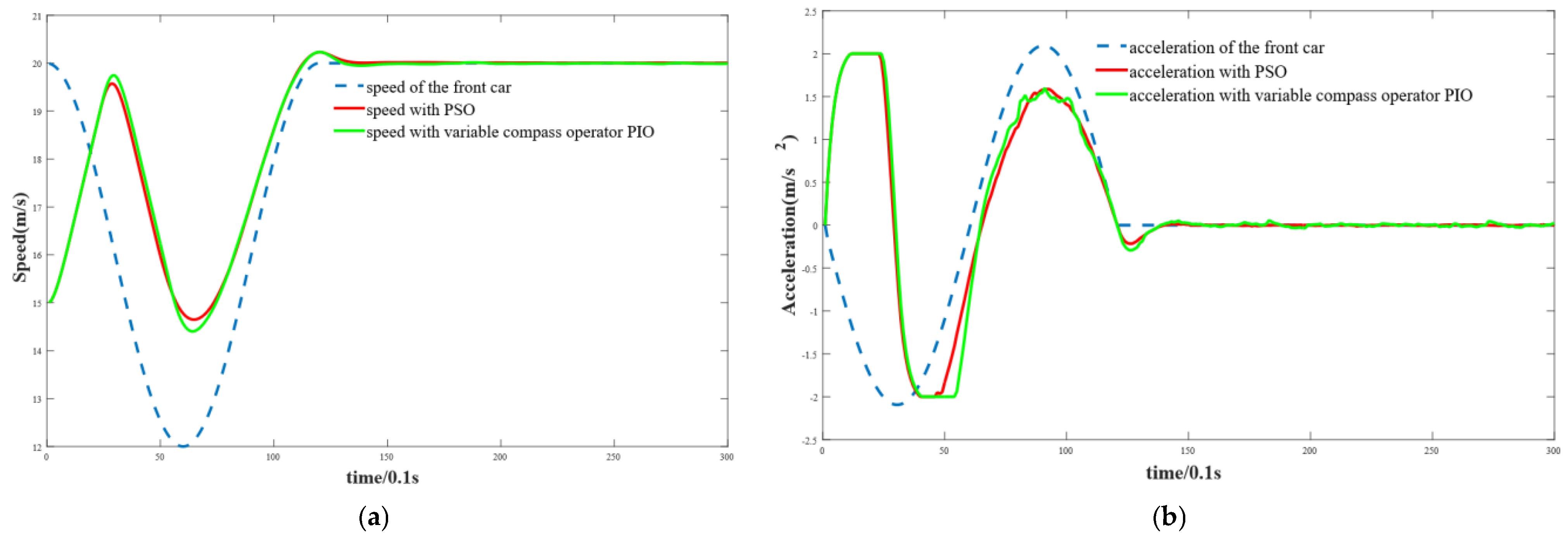
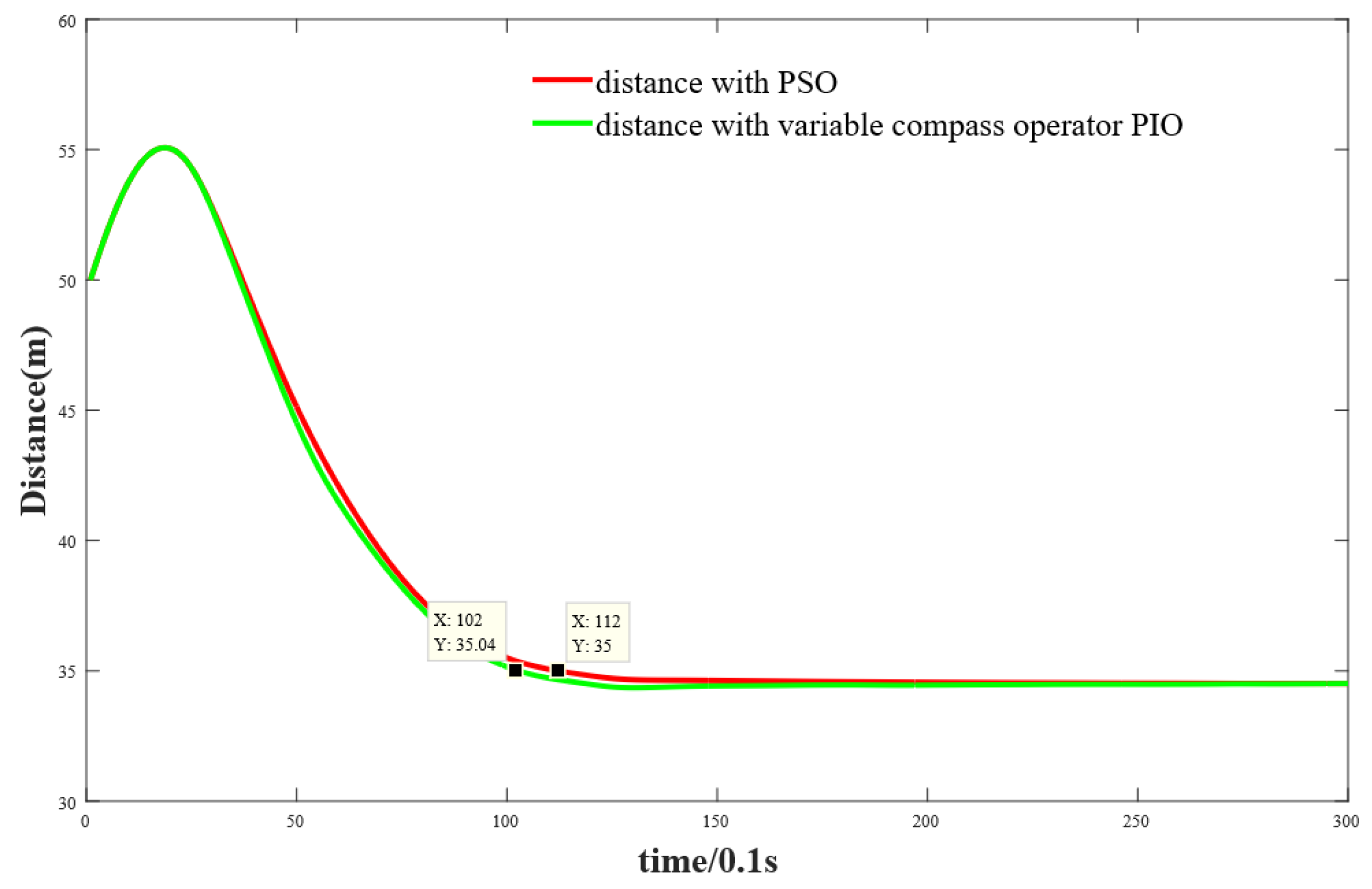
6. Simulations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, X.; Zeng, C.; Luo, J. Research on adaptive cruise control algorithm based on linear quadratic optimal control. J. Wuhan Univ. Technol. Inf. Manag. Eng. 2019, 41, 81–86. [Google Scholar]
- Li, S.E.; Deng, K.; Li, K. Terminal sliding mode control of automated car-following system without reliance on longitudinal acceleration information. Mechatronics 2015, 30, 327–337. [Google Scholar] [CrossRef]
- Li, W.; Duan, J.M. Modeling and simulation of start-stop cruise system of hybrid electric vehicle. Control Eng. 2011, 18, 91–95. [Google Scholar]
- Ali, Z.; Popov, A.A.; Charles, G. Model predictive control with constraints for a nonlinear adaptive cruise control vehicle model in transition manoeuvres. Veh. Syst. Dyn. 2013, 51, 943–963. [Google Scholar] [CrossRef]
- Luo, L.H.; Gong, L.L.; Li, P. Design of dual-mode adaptive cruise control considering driver’s driving characteristics. J. Zhejiang Univ. Eng. 2011, 45, 2073–2078. [Google Scholar]
- Zhang, L.; Chen, F.; Ma, X.; Pan, X.D. Fuel economy in truck platooning: A literature overview and directions for future research. J. Adv. Transp. 2020, 2020, 2604012. [Google Scholar] [CrossRef]
- Chen, X.; Yang, J.; Zhai, C. Economic Adaptive Cruise Control for Electric Vehicles Based on ADHDP in a Car-Following Scenario. IEEE Access 2021, 9, 74949–74958. [Google Scholar] [CrossRef]
- Wu, C.; Xu, Z.; Liu, Y. Spacing Policies for Adaptive Cruise Control: A Survey. IEEE Access 2020, 8, 50149–50162. [Google Scholar] [CrossRef]
- Lazar, C.; Tiganasu, A. String Stable Vehicle Platooning Using Adaptive Cruise Controlled Vehicles—ScienceDirect. IFAC-PapersOnLine 2019, 52, 1–6. [Google Scholar] [CrossRef]
- Gunter, G.; Gloudemans, D.; Stern, R.E. Are Commercially Implemented Adaptive Cruise Control Systems String Stable? IEEE Trans. Intell. Transp. Syst. 2021, 22, 6992–7003. [Google Scholar] [CrossRef]
- Gunter, G.; Janssen, C.; Barbour, W. Model-Based String Stability of Adaptive Cruise Control Systems Using Field Data. IEEE Trans. Intell. Veh. 2020, 5, 90–99. [Google Scholar] [CrossRef] [Green Version]
- Knoop, V.L.; Wang, M.; Wilmink, I. Platoon of SAE Level-2 Automated Vehicles on Public Roads: Setup, Traffic Interactions, and Stability. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 311–322. [Google Scholar] [CrossRef]
- Lee, D.; Leea, S.; Chen, Z. Design and field evaluation of cooperative adaptive cruise control with unconnected vehicle in the loop. Transp. Res. Part C Emerg. Technol. 2021, 132, 103364. [Google Scholar] [CrossRef]
- Yasir, H.M.; Bhatti, A.I.; Mahmood, A. Longitudinal Cruise Control of a Car using Sliding Mode Approach. In Proceedings of the 2019 International Conference on Electrical, Communication, and Computer Engineering (ICECCE), Swat, Pakistan, 24–25 July 2019; pp. 1–5. [Google Scholar]
- Wang, S.; Hui, Y.; Sun, X. Neural Network Sliding Mode Control of Intelligent Vehicle Longitudinal Dynamics. IEEE Access 2019, 7, 162333–162342. [Google Scholar] [CrossRef]
- Baldi, S.; Liu, D.; Jain, V. Establishing Platoons of Bidirectional Cooperative Vehicles With Engine Limits and Uncertain Dynamics. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2679–2691. [Google Scholar] [CrossRef]
- Li, Y.; Tang, C.; Srinivas, P. Nonlinear Consensus-Based Connected Vehicle Platoon Control Incorporating Car-Following Interactions and Heterogeneous Time Delays. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2209–2219. [Google Scholar] [CrossRef]
- Albeaik, S.; Wu, T.; Vurimi, G. Deep truck cruise control: Field experiments and validation of heavy duty truck cruise control using deep reinforcement learning. Control Eng. Pract. 2022, 121, 105026. [Google Scholar] [CrossRef]
- Wu, G.Q.; Zhang, L.X.; Liu, Z.Y. Research status and development trend of automobile adaptive cruise control system. J. Tongji Univ. Nat. Sci. 2017, 45, 90–99. [Google Scholar]
- Yu, G.K.; Wong, P.K.; Zhao, J. Design of an Acceleration Redistribution Cooperative Strategy for Collision Avoidance System Based on Dynamic Weighted Multi-Objective Model Predictive Controller. IEEE Trans. Intell. Transp. Syst. 2021, 99, 1–13. [Google Scholar] [CrossRef]
- Sun, X.Q.; Cai, Y.F.; Wang, S.H. Optimal control of intelligent vehicle longitudinal dynamics via hybrid model predictive control. Robot. Auton. Syst. 2019, 112, 190–200. [Google Scholar] [CrossRef]
- Pan, X.; Chen, B.; Evangelou, S.A. Optimal Vehicle Following Strategy for Joint Velocity and Energy Management Control of Series Hybrid Electric Vehicles. IFAC-PapersOnLine 2020, 53, 14161–14166. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Guo, H.Q. Longitudinal Collision Avoidance and Lateral Stability Adaptive Control System Based on MPC of Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2376–2385. [Google Scholar] [CrossRef]
- Ren, Y.; Zheng, L.; Yang, W. Potential field-based hierarchical adaptive cruise control for semi-autonomous electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 2479–2491. [Google Scholar] [CrossRef]
- Luu, D.L.; Pham, H.T.; Lupu, C. Research on Cooperative Adaptive Cruise Control System for Autonomous Vehicles based on Distributed Model Predictive Control. In Proceedings of the 2021 International Conference on System Science and Engineering (ICSSE), Ho Chi Minh City, Vietnam, 26–28 August 2021; pp. 13–18. [Google Scholar]
- Ma, G.Q.; Wang, B.Q.; Ge, S.S. Robust optimal control of connected and automated vehicle platoons through improved particle swarm optimization. Transp. Res. Part C Emerg. Technol. 2022, 135, 103488. [Google Scholar] [CrossRef]
- Ma, H.; Chu, L.; Guo, J. Cooperative Adaptive Cruise Control Strategy Optimization for Electric Vehicles Based on SA-PSO With Model Predictive Control. IEEE Access 2020, 8, 225745–225756. [Google Scholar] [CrossRef]
- Li, L.; Xu, S.; Nie, H.; Mao, Y.; Yu, S. Collaborative Target Search Algorithm for UAV Based on Chaotic Disturbance Pigeon-Inspired Optimization. Appl. Sci. 2021, 11, 7358. [Google Scholar] [CrossRef]
- Zhang, L.X.; Wu, G.Q.; Guo, X.X. Vehicle multi-objective adaptive cruise control algorithm. J. Xi’an Jiaotong Univ. 2016, 50, 136–143. [Google Scholar]
- Zhou, J.M.; Zhang, L.X.; Yi, F.Y.; Peng, J.K. Automotive adaptive cruise prediction control based on particle swarm optimization. J. Beijing Inst. Technol. 2021, 41, 214–220. [Google Scholar]
- Duan, H.B.; Qiao, P.X. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning. Int. J. Intell. Comput. Cybern. 2014, 7, 24–37. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Time-distance | 1.5 | Upper limit | −5 |
| System gain | 1.05 | Weight coefficient | diag(0.12,1,0) |
| Time constant | 0.393 | Weight coefficient | 0.1 |
| Sampling period | 0.1 | Weight coefficient | 0.001 |
| Lower limit | −2 | Predict period | 40 |
| Upper limit | 2 | Particle swarm size | 100 |
| Lower limit | −1 | Learning factor c1 | 2 |
| Upper limit | 1 | Learning factor c2 | 2 |
| Lower limit | 5 | Inertia weight | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Deng, Y.; Sun, S. Adaptive Cruise Predictive Control Based on Variable Compass Operator Pigeon-Inspired Optimization. Electronics 2022, 11, 1377. https://doi.org/10.3390/electronics11091377
Li Z, Deng Y, Sun S. Adaptive Cruise Predictive Control Based on Variable Compass Operator Pigeon-Inspired Optimization. Electronics. 2022; 11(9):1377. https://doi.org/10.3390/electronics11091377
Chicago/Turabian StyleLi, Zhaobo, Yimin Deng, and Shuanglei Sun. 2022. "Adaptive Cruise Predictive Control Based on Variable Compass Operator Pigeon-Inspired Optimization" Electronics 11, no. 9: 1377. https://doi.org/10.3390/electronics11091377
APA StyleLi, Z., Deng, Y., & Sun, S. (2022). Adaptive Cruise Predictive Control Based on Variable Compass Operator Pigeon-Inspired Optimization. Electronics, 11(9), 1377. https://doi.org/10.3390/electronics11091377