1. Introduction
Modern society is experiencing a series of challenges in matters of power generation associated with the use of fossil fuels in the power generation process. This situation has led to an increase in greenhouse gas emissions, which has caused severe air pollution problems [
1]. Moreover, fossil fuels are non-renewable resources that have become increasingly depleted in recent years, resulting in a rise in their prices [
2,
3]. To deal with these problems, power generation has started using use renewable sources as fuels (such as sunlight and wind); in fact, nearly one-third of the global electricity demand is fulfilled only with the use of renewable energies [
4]. Among all the renewable energies, wind energy among the most widely spread, because it is mature from a technological point of view, it presents a competitive levelized cost of energy (LCOE) and it is relatively easy to obtain an important amount of energy by means of this renewable resource [
5]. Nonetheless, the use of wind energy implies some important challenges. For instance, the amount of generated energy is location-specific, and a study of the wind conditions in the location is required to properly select the wind turbine and to guarantee that energy production is sufficient to represent monetary earns [
6]. Also, the policies regarding wind generation are different from one country to another [
7]. Additionally, wind generators are complex systems that combine mechanical, electric, and electronic devices to transform wind energy into electricity, and they must provide a robust, reliable, and high-quality power supply. Maintaining this high-quality supply is a challenge due to the large amount of non-linear loads that are used nowadays. These non-linear loads introduce a high number of harmonics that contaminate the power grid and cause waveform distortion. An electric grid that presents power quality (PQ) issues generates damages in domestic loads and leads to unexpected stops at industrial facilities that will translate into financial losses. In this sense, the electric generator becomes of great importance in any wind turbine. Therefore, in order to optimally design a wind generator, it is necessary to develop strategies that allow determining the existence of failures that compromise the quality of the generated energy. PQ problems cause erratic operation of electronic controllers and computer data loss [
8]. They also lead to the inappropriate operation of relays, programmable logic controllers, and computers. Therefore, the methodologies for disturbance detection allow for improving the design of wind generators and preventing the malfunctioning of their components.
PQ monitoring has been widely explored, and several techniques have been developed to determine the presence of waveform distortion or power quality disturbances (PQD) in electrical signals. To properly perform this identification, it is important to carry out a feature extraction that provides information regarding the occurrence of any event. One of the most common techniques for this feature extraction is the Fourier transform (FT) [
9,
10], which delivers good results in the evaluation of stationary disturbances such as harmonic distortion. However, the conventional FT-based methodologies present some important drawbacks, such as the existence of spectral leakage and the fact that this technique cannot be applied in the analysis of transient disturbances. Moreover, the FT cannot provide temporal information related to the occurrence of the PQD. To overcome the issues related with the FT, some other time-frequency transforms have been explored, for instance, the short-time Fourier transform [
11], S-transform [
12]; the wavelet transform [
13]; empirical mode decomposition (EMD) [
14]; and the Hilbert Huang transform [
15], among others. These techniques are able to detect not only stationary PQD but also non-stationary PQD; furthermore, they provide accurate information associated with the time when the disturbance occurs. However, these time-frequency techniques demand a higher computational effort and lose accuracy in frequency information, since they work with modes that contain a group of frequencies instead of a single frequency component. Also, they suffer from mode mixing, so the information regarding a specific PQD can appear in more than one mode, hindering the disturbance identification. This is why some other works prefer to extract features like high-order statistics (HOS) directly in the time domain [
16]. The use of HOS features presents some interesting advantages; for instance, the insensitivity to Gaussian noise and the low computational burden. On the other hand, HOS are highly sensitive to window size, and the use of a different number of samples of the same signal may lead to different results, especially when the PQD is short. Finally, it is important to mention that all the aforementioned techniques can be implemented to work along with artificial intelligence techniques such as artificial neural networks (ANN) [
17], fuzzy logic-based classifiers [
8], support vector machines [
18], genetic algorithms (GA) [
19], and even with some deep learning approaches [
20]. This combination of strategies allows for performing an automatic classification of the founded PQD accurately. Yet, the number of extracted features in all the aforementioned approaches can be high, and many of them do not deliver important information regarding the existence of a specific disturbance. Thus, it is necessary to develop strategies to perform a proper feature selection. Specifically speaking of power quality in grids with injection of wind energy, it has been reported that the disturbances that more commonly appear are harmonic distortions, notch, voltage swell/sag, momentary interruptions, and voltage fluctuations [
21]. To deal with these issues, some wind generators incorporate distribution static compensators [
22] or passive and active filters [
23,
24]. These devices are intended to suppress the presence of harmonics and to work as reactive power compensators, and the PQ of the grid improves as a result of their action. Since, in this field, attention is focused on the development of devices for mitigating PQ issues, there is a lack of methodologies for the detection and identification of disturbances. Nonetheless, the development of techniques for PQ analysis can work along with the devices for PQ issues mitigation, because they can estimate the features required for tuning the filters and compensators used in wind turbines. Additionally, information from PQ monitoring allows for improvement in the design of blades, mechanical transmission systems, electric generators, in order to obtain a more reliable and robust machine.
Indeed, several methodologies have been reported for carrying out optimal feature selection in order to discard redundant information. Thus, some optimization techniques, like k-means [
25] and bio-inspired algorithms [
26], are used to set a model that describes the behavior of the PQD and select the features that better describe such behavior. In this way, it is possible to reduce the required computational effort and to increase the efficiency of the results. Also, in recent years, the use of dimensionality reduction techniques such as the linear discriminant analysis (LDA) [
27] and principal component analysis (PCA) has been explored [
28] for dealing with a complex set of features and reducing it to a three-dimensional or two-dimensional view. Additionally, with the use of these techniques, it is possible to maximize the distance between clusters, making the classification process more efficient and accurate. The aforementioned works use features in only one domain (time, frequency, or time-frequency); therefore, they are prone to experience difficulties when dealing with disturbances that exhibit similar behaviors in the analyzed domain. Hence, in [
29], a multi-domain feature extraction for discerning between PQD with similar behavior is proposed; then, using an autoencoder, a dimensionality reduction is performed to facilitate the classification process. The problem with the multi-domain feature extraction is that the number of features to be considered highly increases. In this sense, using an optimization technique for feature selection may be helpful for reducing the effort required in the dimensionality reduction process. In terms of wind turbines, these methodologies have been used for the detection of failures in the components of the mechanism. For instance, in [
30], PCA is used along with Hoteling’s T2 method to assess the condition of the electric generator in a wind turbine. On the other hand, in [
31], different variables such as active power, wind speed, rotor velocity, and blade angle are measured in a wind power installation. A generalized regression neural network ensemble for single imputation is used for feature extraction in all the measured variables and then, a feature reduction is performed using PCA. Finally, the wavelet-based probability density function is implemented, with the aim of identifying blade failures. Although these works deal with the identification of undesired conditions in wind turbines, they only consider the condition of the machine, and the PQ is left aside. It is important to pay more attention in the detection of PQD, since considering them is helpful for the general design of the wind generation system.
Thereby, the main contribution of this work relies in the proposal of a strategy for optimal feature selection that allows for modeling electric signals through statistical features in different domains that are used to better characterize the behavior of a PQD. The proposed methodology considers as a first step the implementation of a multi-domain feature extraction. Since the resultant number of features is high, a GA–PCA optimization is carried out to eliminate those features that provide redundant information. Then, a feature learning stage is implemented. In this step, self-organizing maps (SOM) are used to obtain a model of the PQD in the time, frequency and time-frequency domains. Finally, the SOM models obtained in every domain are used as inputs of a softmax layer ANN that works as the classifier. In the present work, both stationary and non-stationary disturbances are considered. Among the wide variety of PQD, only the following are considered: harmonics and voltage fluctuations for the stationary disturbances; and voltage sag, voltage swell, and transients (impulsive and oscillatory) for the non-stationary disturbances. These disturbances are selected because their appearance is common in grids that include renewable resources such as wind generation. The training and validation of the proposed strategy are performed using a set of synthetic signals that are modeled to be a reliable representation of electrical signals containing PQD. Then, the methodology is tested using two different groups of real signals. The first set is provided by the IEEE 1159.3 working group, whereas the second one corresponds to a series of measurements taken in a real wind farm located in northern Spain. As previously mentioned, the existence of PQD can produce a malfunction of the components of the machine; therefore, this methodology aims to be a tool for detecting PQD and improving the reliability of the wind turbine by preventing its failure. In this way, the designers and manufacturers of wind turbines can consider the existence of PQD during the entire production process in order to improve the quality, not only of the power supply, but of the entire generation system.
3. Methodology
As mentioned, in the design of electric machines such as wind generators, it is important to consider the identification of failures and situations that compromise the quality of the power supply and, therefore, the integrity of the loads attached to the grid. In this regard,
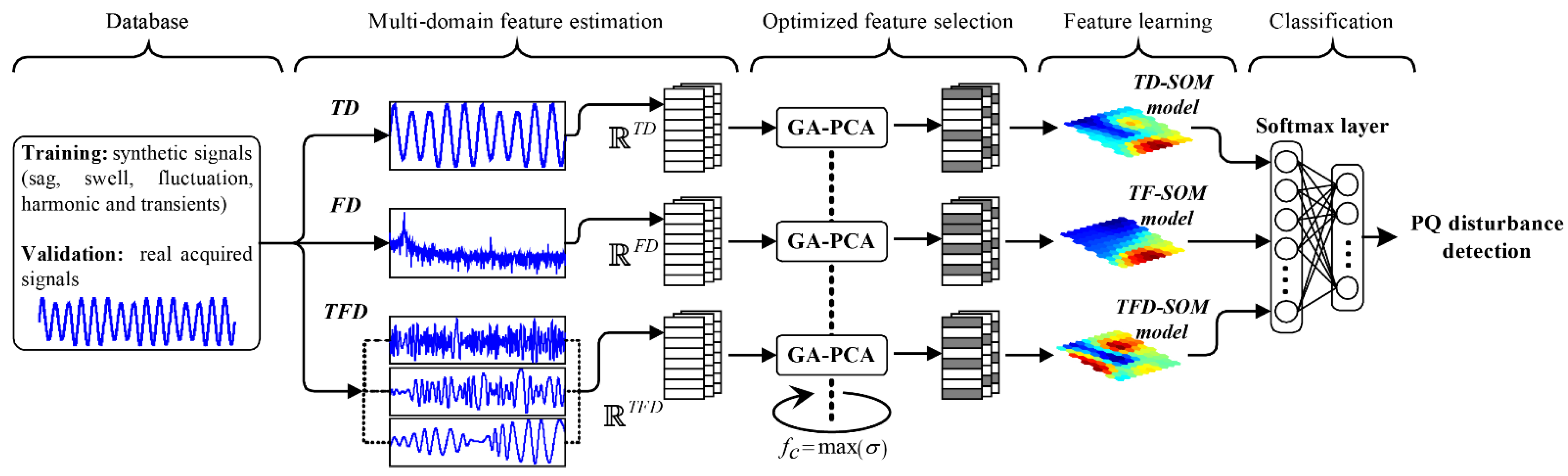
Figure 3 presents the flowchart of the proposed strategy that focuses on the identification and classification of PQD through an optimal multi-domain feature selection. The methodology has been designed to follow a step-by-step scheme to make its comprehension and application easier. A total of five stages compounds the PQ monitoring strategy: database, multi-domain feature estimation, optimized feature selection, feature learning and classification, where this final stage delivers the PQ disturbance detection as output. Every step is described in detail in the following subsections.
3.1. Database
This work considers the use of synthetic and real signals. The former are used in the training process whereas the latter are used for validating the results of the proposed strategy.
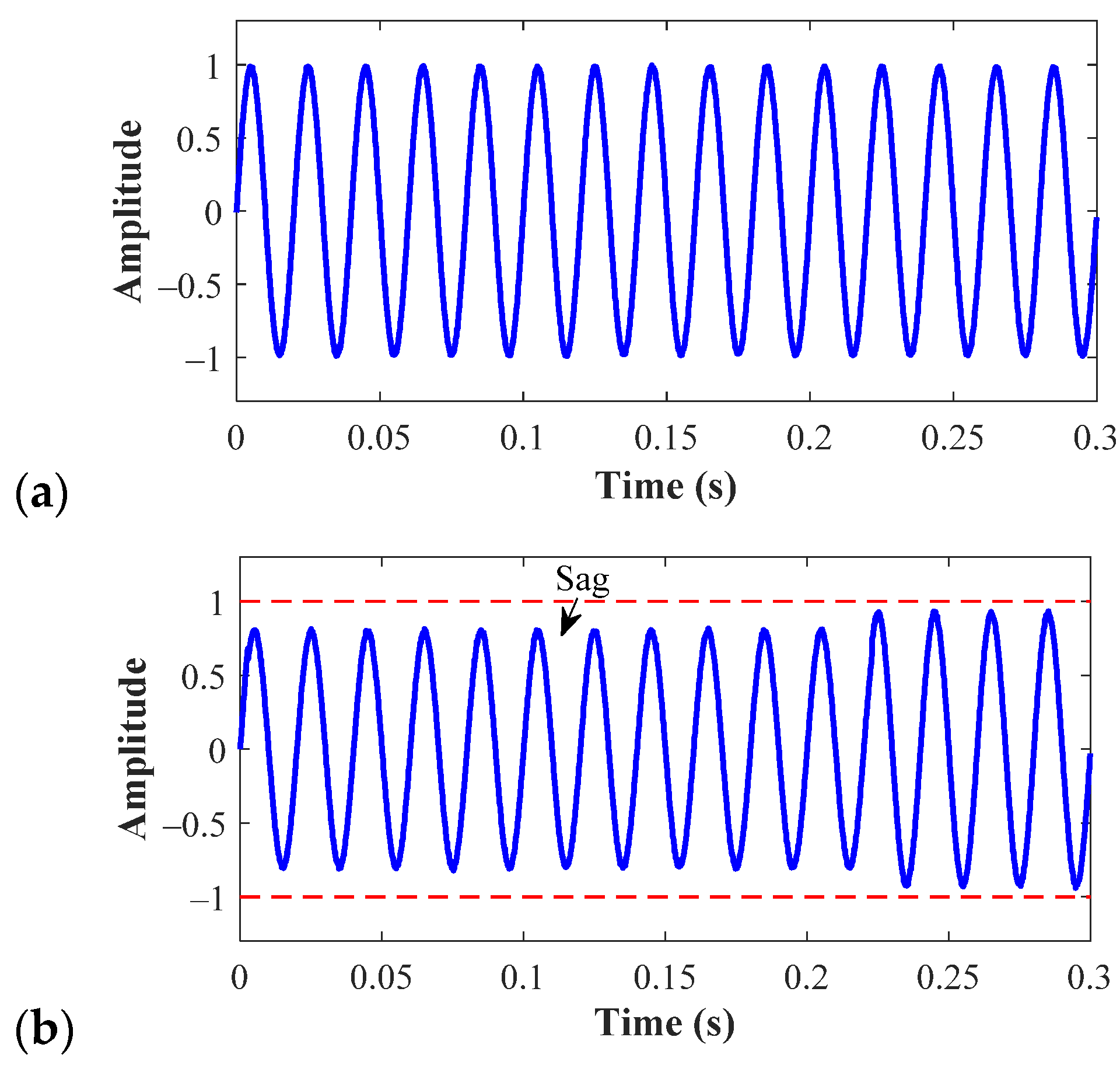
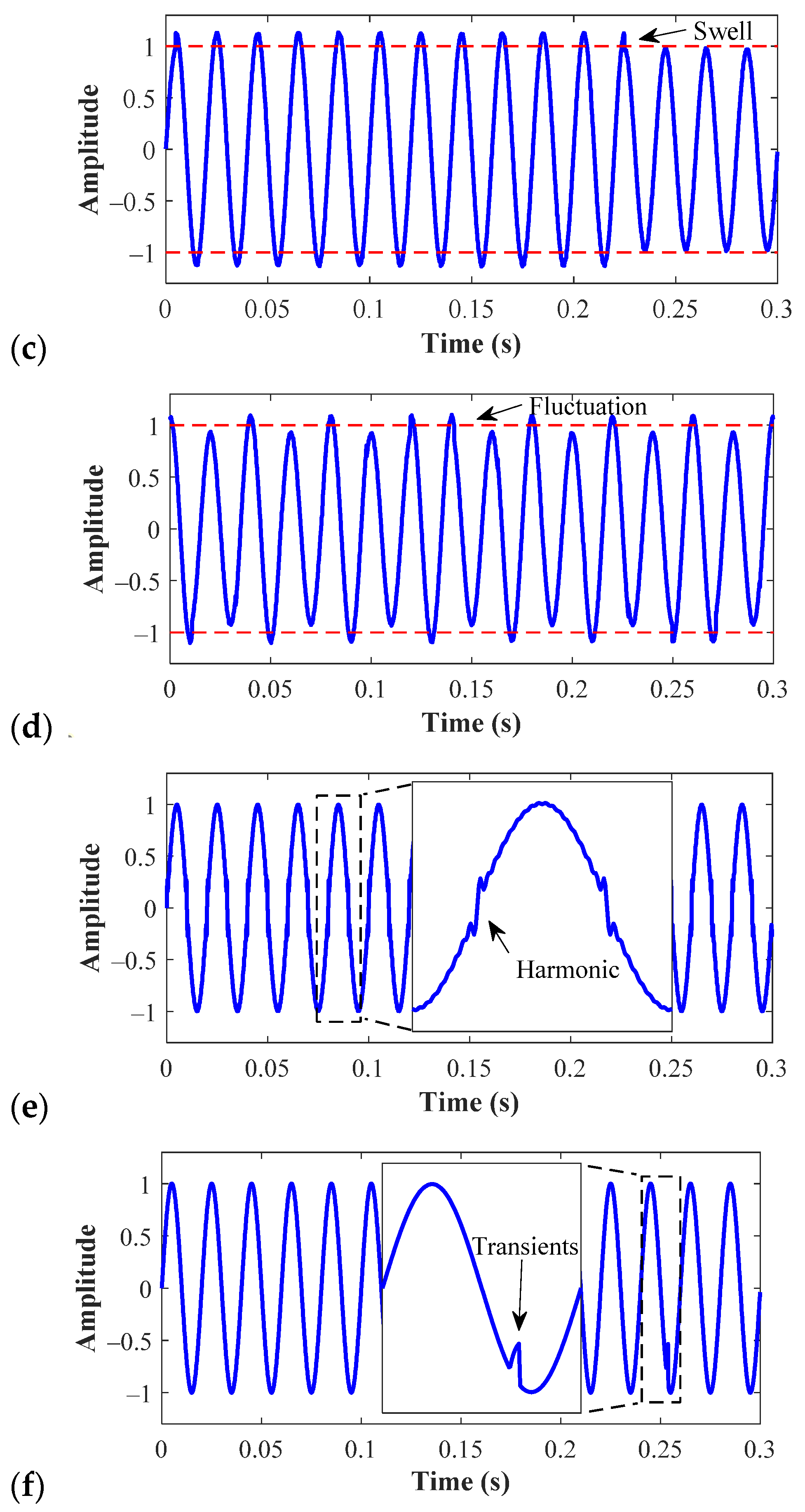
The synthetic signals are generated with the purpose of representing six different conditions of electrical signals: a healthy signal (i.e., a signal without any disturbance), a voltage sag, a voltage swell, transients (impulsive and oscillatory), voltage fluctuations, and harmonic distortion. Considering the definitions stated by the IEEE standard 1159–2019, the mathematical models presented in
Table 1 are used for generating the set of synthetic signals.
Before continuing, it is important to address some facts. For instance, all the parameters presented in the third column of
Table 1 are randomly generated considering the range of values established in the same table. Also, the term
, which represents the frequency of the fundamental component, is considered as 50 Hz. Moreover, for the case of harmonics, the number of harmonics and the amplitude of harmonicas is randomly selected, but in all the cases, a THD value higher than 8% must be accomplished to consider those cases with unacceptable harmonic distortion. Additionally, the model presented for the description of transients corresponds to an impulsive transient. Although impulsive and oscillatory transients are different and they can be described with different parameters, for the sake of simplicity, in this work, it is considered that an oscillatory transient can be expressed as an impulsive transient that appears more than one time with different values; therefore, the classifier will detect both disturbances only as transients. Also, it is considered that all the signals are generated using a sampling frequency of 8 kHz and with a duration of 300 ms. Finally, 100 signals per condition are generated to obtain a total of 600 elements that will be used in the following stages of the training process.
Regarding the real signals, these are taken from two different data sets. A first data set is provided by the IEEE 1159.3 working group [
37], and it consists of a series of voltage and current signals, recorded from different real locations, with diverse PQD. The data set is formed by over 300 signals, but to validate the correct performance of the proposed strategy, only 3 cases are presented: transients, a voltage sag, and a voltage swell. In these signals, it is considered that the fundamental frequency is 60 Hz, and the signals are acquired at different sampling rates. For instance, the signal with the transients is acquired at a sampling rate of 15,360 Hz, whereas the signals with voltage sag and voltage swell are acquired considering a sampling frequency of 7680 Hz. The second set of real signals is acquired from a 30-MW wind park located in northern Spain. A proprietary data acquisition system (DAS) is used for collecting and storing electrical signals. This DAS is based on field-programmable gate array (FPGA) technology and it is able to acquire data from 7 channels simultaneously. The sampling rate of these signals is 8 kHz and the fundamental frequency is 50 Hz. At this location, a total of 4 different cases are presented: one for a healthy signal, another one for voltage sag, one more for transients, and, finally, one for harmonic distortion. Both sets of real signals are used to assess the performance of the proposed strategy under real conditions. However, the proposed methodology aims to be a tool for wind turbine designers; therefore, the results obtained with the second set of real signals come to be of great importance for validating the reliability of this strategy.
3.2. Multi-Domain Feature Estimation
It has been previously addressed that for PQD that present similar behaviors, a multi-domain approach may be helpful for obtaining better classification. Thus, h the use of three different domains is proposed here: time domain (TD), frequency domain (FD), and time-frequency domain (TFD). However, before performing any feature estimation, it is necessary to perform an amplitude normalization of the electrical signal; such normalization is carried out considering the nominal RMS value of the voltage signal. Therefore, all the amplitude values are dimensionless and expressed as per unit (pu). This consideration is implemented because the data sets that are used in this work consider signals from different grids and, therefore, have different nominal amplitudes. Nevertheless, by performing this normalization, the proposed methodology is able to properly work, even for signals with different nominal amplitude values.
In the case of the TD feature estimation, the 15 statistical features summarized in
Table 2 are calculated for every signal. Therefore, the dimensionality of this space is set as
and a feature matrix composed by statistical time domain features is obtained,
. In the case of the FD analysis, first, it is necessary to compute the fast Fourier transform (FFT) of each normalized signal to obtain its representative spectrum. Then, the 14 statistical features presented in
Table 3 are estimated over the signal spectrum. Hence, the dimensionality of this new space is
and a representative FD-dimensional feature matrix,
, is obtained. At this point, it is important to address the fact that the statistical features are estimated over the amplitude values of the signal spectrum. Since the signals have been previously normalized, it is expected that the fundamental component presents an amplitude of 1 pu in a healthy condition, and any variation from this value will be related with the existence of a disturbance. Moreover, since only the amplitude values of the spectrum are considered, the proposed methodology can be applied in any signal, regardless the value of the fundamental frequency. This turns to be one of the main advantages of the proposed approach, because it can be applied in 60 Hz grids and also in 50 Hz grids without requiring any modification. Finally, to carry out the TFD feature estimation, a preprocessing of the normalized signals is required prior to feature estimation. This preprocessing task consists of performing a signal decomposition, and the EMD technique is used for this purpose. The result of applying the EMD over the voltage signals is a set of sub-signals that show the main oscillatory modes of the original signal and that are called intrinsic mode functions (IMF). An important drawback of the EMD technique lies in the fact that it is not possible to have a priori knowledge of the IMF that can be obtained from a particular signal. Moreover, when the EMD is applied over two different signals, it is possible that a different number of IMF is obtained from each signal. To consider that a signal provides significant information in the TFD, only those signals that deliver 3 or more IMFs after applying the EMD are considered; the rest are discarded. Once the preprocessing task has been applied, the set of 15 statistical features presented in
Table 2 are individually estimated over the three first resulting IMFs. So, for this last space, the dimensionality turns out to be
, and, as in the previous cases, it is possible to obtain a TFD-dimensional feature matrix,
As in the previous cases, the feature estimation is performed over the amplitude values of every IMF; therefore, the methodology is insensitive to variations in the value of the fundamental frequency, and it can be applied in both 60 Hz and 50 Hz grids.
At this point, it is important to mention that, in the case of the training process, every synthetic signal is generated with a duration of 300 ms, and the feature estimation is performed over the complete signal. In the case of the real signals, they present different durations: if the length of the real signal is less or equal to 300 ms, the feature extraction is carried out over the complete signal; if the length of the signal is more than 300 ms, the signal is divided in windows of 300 ms and the statistical features are extracted for every window. Moreover, this proposed approach is intended to be applied offline, even with the real signals.
3.3. Optimized Feature Selection
Considering the three proposed domains (TD, FD and TFD), a total of 74 statistical features are estimated. This is a considerable number of features, and there is no guarantee that all of them provide valuable information regarding the PQD behavior. This is why it is necessary to perform an optimization in the feature selection process. For this purpose, the fusion of two different techniques, GA and PCA, is proposed. GA is a heuristic search algorithm based in Darwin’s natural selection. This technique has been widely used for solving optimization problems because of its ability for minimizing estimation errors. GA requires an objective function that will be the one in charge of defining the goodness of fit (GOF) in the optimization task. In this work, the objective function for the GA is directly stated by the PCA, a mathematical procedure that allows performing a reduction in the dimensionality of a problem, preserving the variability of the data. To assess the variability that has been preserved by the PCA, the data variance is used, and it is precisely this value of the parameter that will be used for the GA to perform the optimization task. The complete optimized feature selection is carried out following the procedure proposed in [
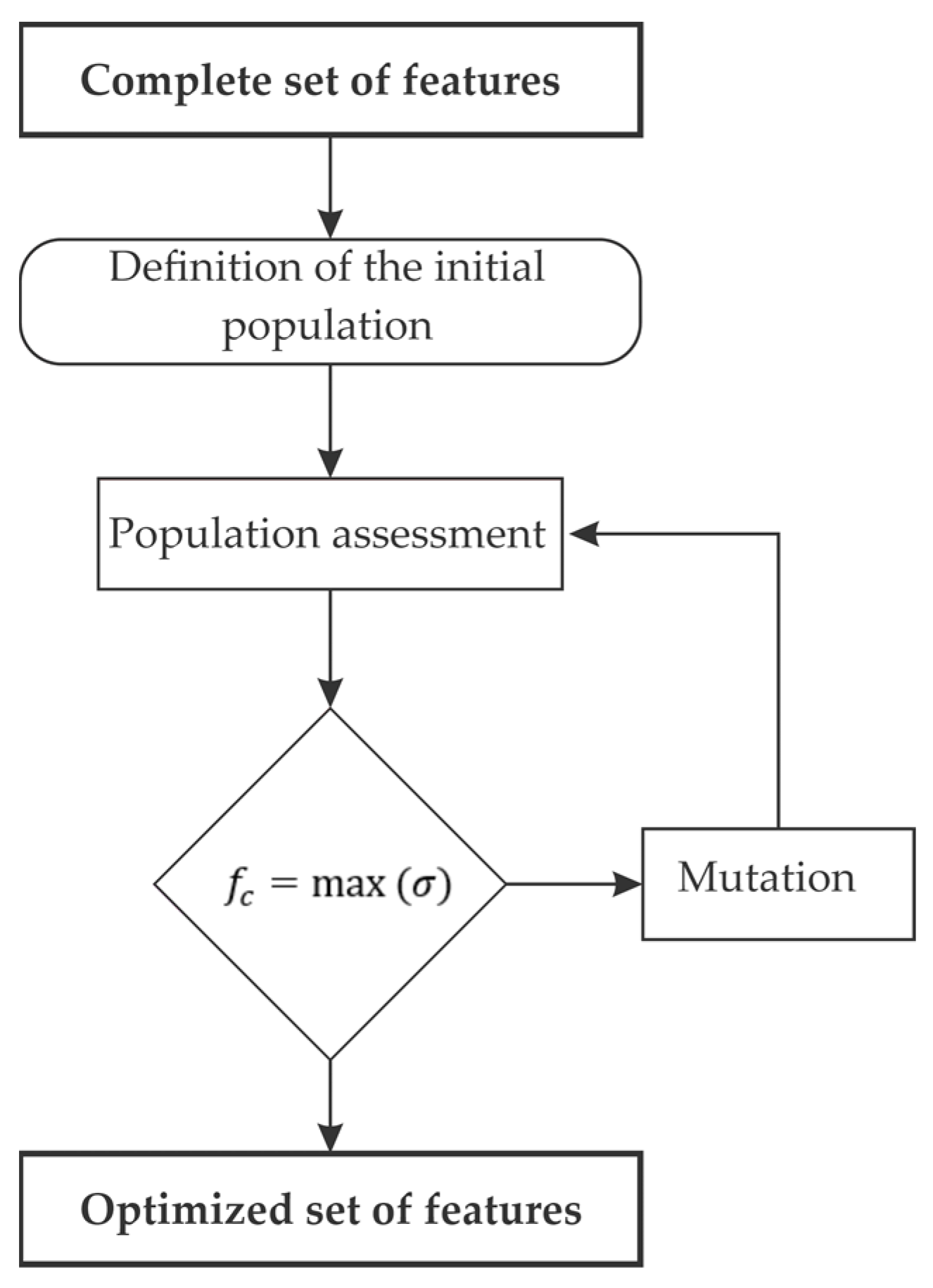
38] and illustrated in
Figure 4 as described below:
Stage 1: Definition of the initial population. It is considered that the population that will be held by the GA is composed of a logical vector that counts with a total of 74 chromosomes, where every chromosome represents each one of the statistical features previously estimated. A chromosome takes a value of zero if the statistical feature that represents is not considered in the evaluation process, and it takes a value of one if the statistical feature is being considered in the analysis. Thus, the initial population is randomly generated by considering that at least one of the elements contained in the logical vector has to be selected to be evaluated; also, more than one element can be evaluated. Once this task has been fulfilled, the procedure goes to stage 2.
Stage 2: Population assessment. At this point, the fitness function of the GA must be selected to assess the performance of each individual. In this particular case, the fitness function is defined in terms of the accumulation of the data variance. This cumulative variance is calculated using the PCA, and the fitness function comprises the cumulative variance of the two and three first principal components. In this sense, the optimization problem that must be solved by the GA consists of searching for the specific statistical features that maximize the cumulative data variance delivered by the PCA. Once the whole population is evaluated, the condition of best features obtained is analyzed; therefore, the next stage is 4.
Stage 3: Generation of a new population. The GA has two operations that allow to generate a new population preserving the values that positively contribute to reach the optimization goal. These operations are the crossover and the mutation. Here, the common single-point crossover operator and the roulette wheel selection are in charge of generating this new population. In this way, it is possible to take the chromosomes of the previous population that present the highest fitting values (higher data variance), and keep them for the new population. Also, to prevent stagnation and to provide the new population with fitness variability, the mutation operation is applied using a Gaussian distribution. Next, the new population has to be evaluated; thus, the algorithm continues in stage 2.
Stage 4: Stop criteria. There are two different constrains that determine if the GA must finish its execution. The first one occurs when the optimization problem is solved and the GA finds the features that reach the highest maximization of the data variance; the second one consists on reaching a maximum number of generations (iterations). When one of the stop criteria is reached, the GA delivers the optimized set of features and the iterative process finishes; otherwise, the process is iteratively repeated until one of the stop criteria is reached. If the stop criteria are not met, then the algorithm continues in stage 3.
The described procedure is applied to each domain separately; therefore, three optimized feature sets are obtained: one for the TD, other for the FD and a third one for the TFD. Then, the feature learning step only receives the sets of features that reached the maximum cumulative variance. Therefore, as a result of the optimized feature selection, the dimensionality of each one of the domains has been reduced. This situation is helpful for the next steps in order to obtain a better characterization of each disturbance.
3.4. Feature Learning
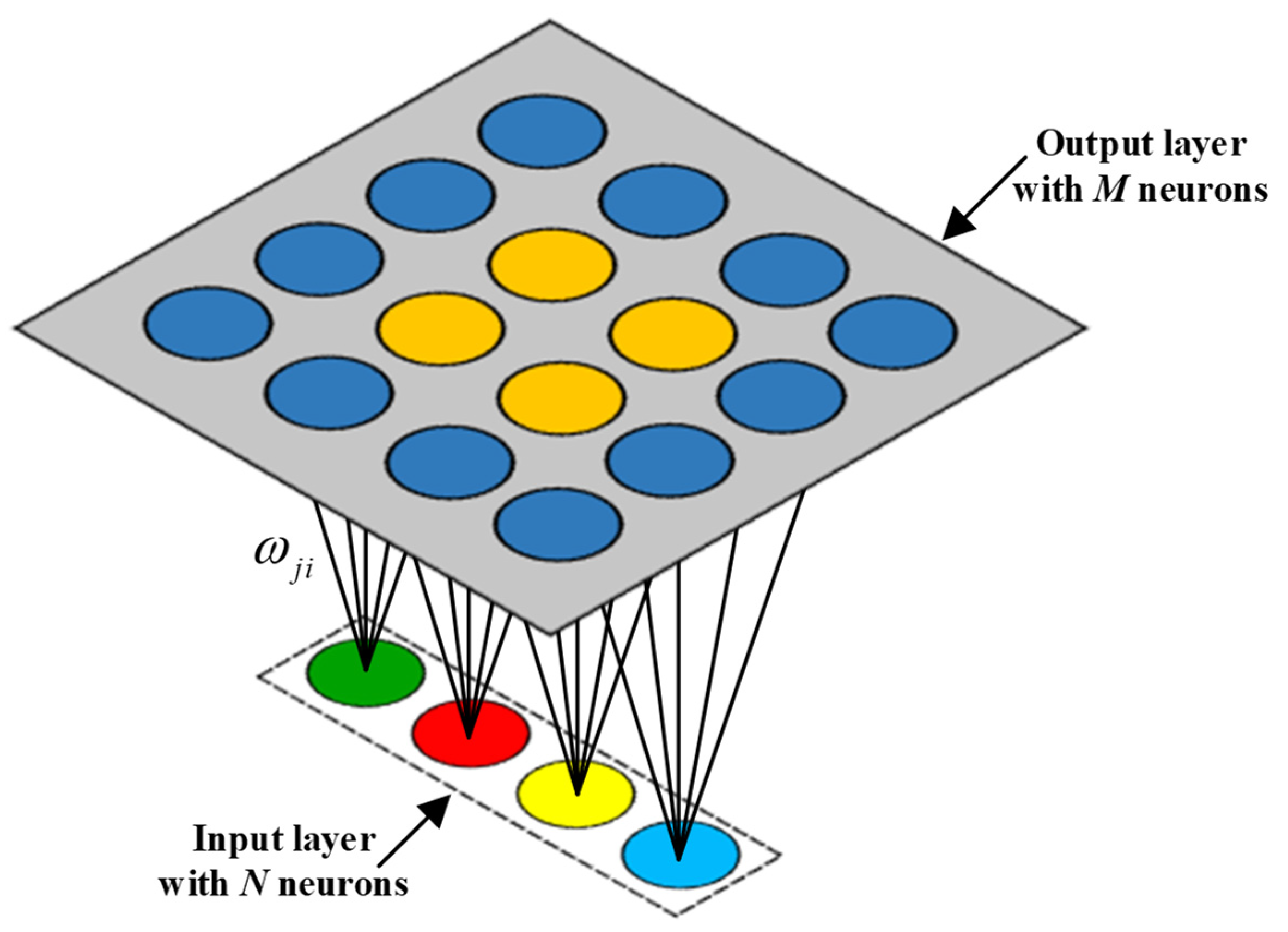
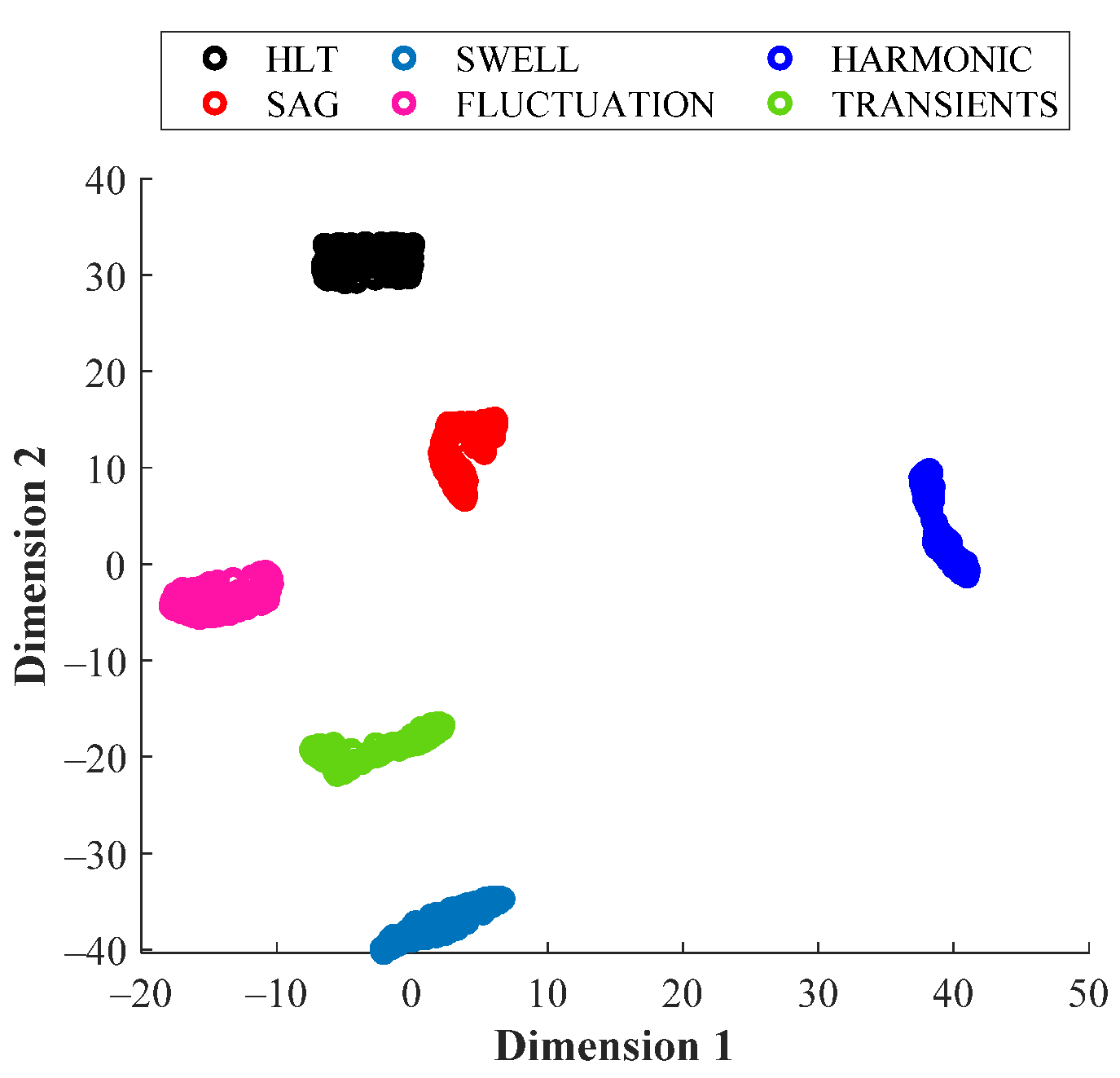
The feature learning stage is performed by means of using the SOM unsupervised algorithm, and the objective of this stage lies in modeling those selected sets of features that better characterize each of the evaluated conditions for the three domains of analysis, TD, FD and TFD. In this regard, different SOM neuron grids are generated, as many feature matrices are available, where there exist three available feature matrices that characterize each one of the evaluated conditions. Therefore, several SOM neuron grids are generated with a pre-defined number of neurons, i.e., defined with 100 neurons over a 10 × 10 grid, and then each one of the available feature matrices is subjected to the feature learning. Thereby, the resulting SOM neuron grids may represent each one of the different evaluated conditions (healthy or normal, sag or swell voltages, transients like impulsive and oscillatory, voltage fluctuations and harmonic distortion) and the original d-dimensional space of the input feature spaces are then represented into a 2-dimensional neuron grid. Once the feature learning is carried out, for each SOM neuron grid model, the pre-defined neurons known as matching unit (MU) are adapted to the input feature spaces or characteristic feature matrices preserving the topological properties that represent a high-performance feature characterization of the assessed conditions.
3.5. Classification
The idea of performing an optimized feature selection and then the modeling of the disturbances under evaluation is to carry out the classification process as simply as possible. In sense, the use of a simple softmax layer neural network to perform the multicategory classification is proposed. Therefore, the input layer of the neural network receives the three SOM neuron grid models for each one of the studied conditions and the output layer of the softmax network is composed of six neurons representing six different categories that correspond to each one of the conditions under test; that is; healthy or normal, sag or swell voltages, transients, voltage fluctuations and harmonic distortion. This approach is based on a probability function and the category with the highest probability is delivered as result. These probabilities are calculated using the mathematical expression shown in (5).
where
is the input matrix with the SOM neuron grid models,
is the
m-th category,
is the weight for the
m-th neuron,
is the activation of the
m-th neuron, and
is the number of categories.
The purpose of this block is to determine if an electrical signal presents a PQD; therefore, the output of the classifier is the PQ disturbance detection between the healthy or normal, sag or swell voltages, transients, voltage fluctuations and harmonic distortion conditions and it allows for determining whether or not a signal is contaminated. When a specific signal is introduced as input of the proposed methodology, it follows the complete described scheme, and the signal is classified in one of the 6 categories: healthy, sag, swell, transients, fluctuations or harmonics. It is important to mention that the IEEE standard 1159–2019 states that a transient is an event that is undesirable but momentary in nature and it classifies a transient event into two categories: impulsive and oscillatory. Since it has been mentioned that, in this work, both the impulsive transient and the oscillatory transient are treated as only one type of PQD, when one of these disturbances is detected, the classifier delivers transients as output, indicating that it can be impulsive or oscillatory.
In the design of a specific electric machine, such as wind generators, it is expected that the delivered electric signals can be classified as healthy; otherwise, it is an indicator of some problem that must be corrected in the design or the operation of the machine. Hence, the PQ disturbance detection allows for taking actions to improve the design of the complete system and increase the reliability of the same.
5. Conclusions
Due to the recent issues associated with air pollution and the scarcity of fossil fuels, renewable sources are an attractive alternative for energy generation. Therefore, it is necessary to properly design the electric machines that are used in this type of generation to ensure a robust and reliable power supply. One of the issues that must be considered in the design of electric generators used in wind turbines is that the PQ remains within acceptable levels; thus, the methodologies for detecting disturbances in electric signals are of great interest in this area.
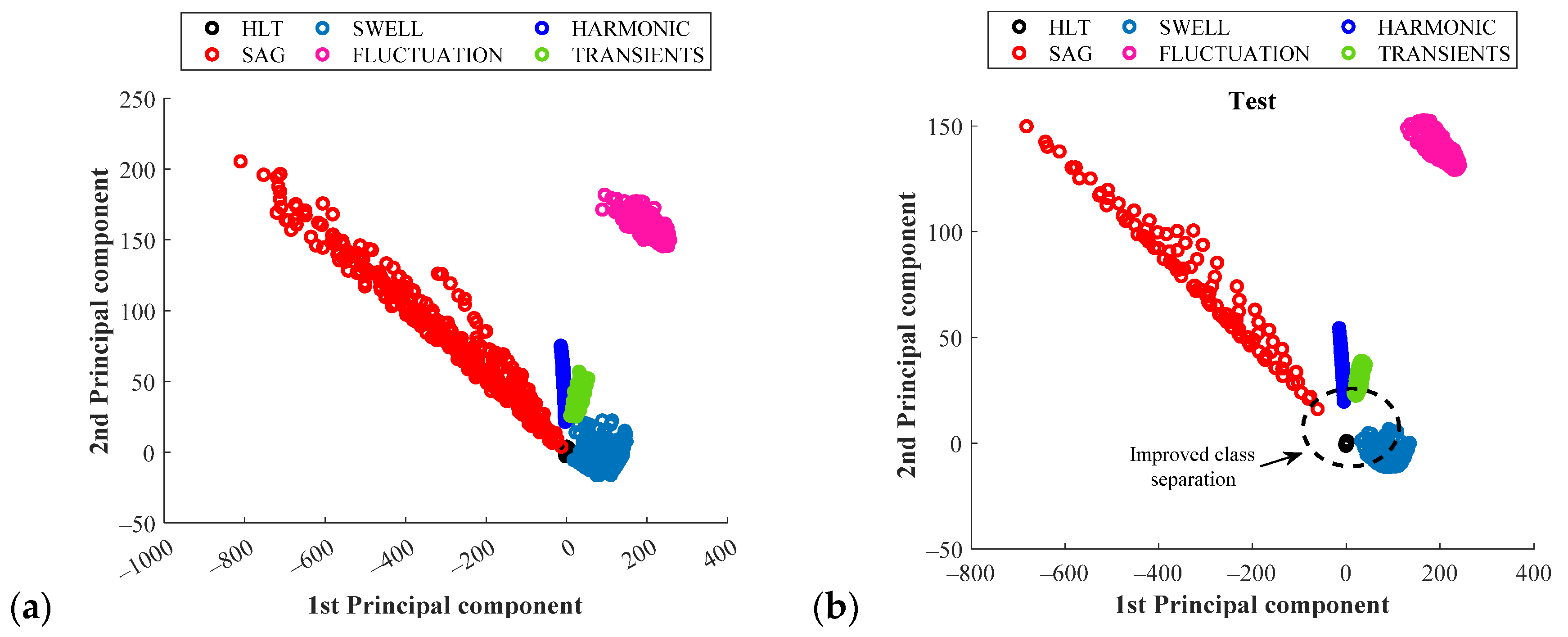
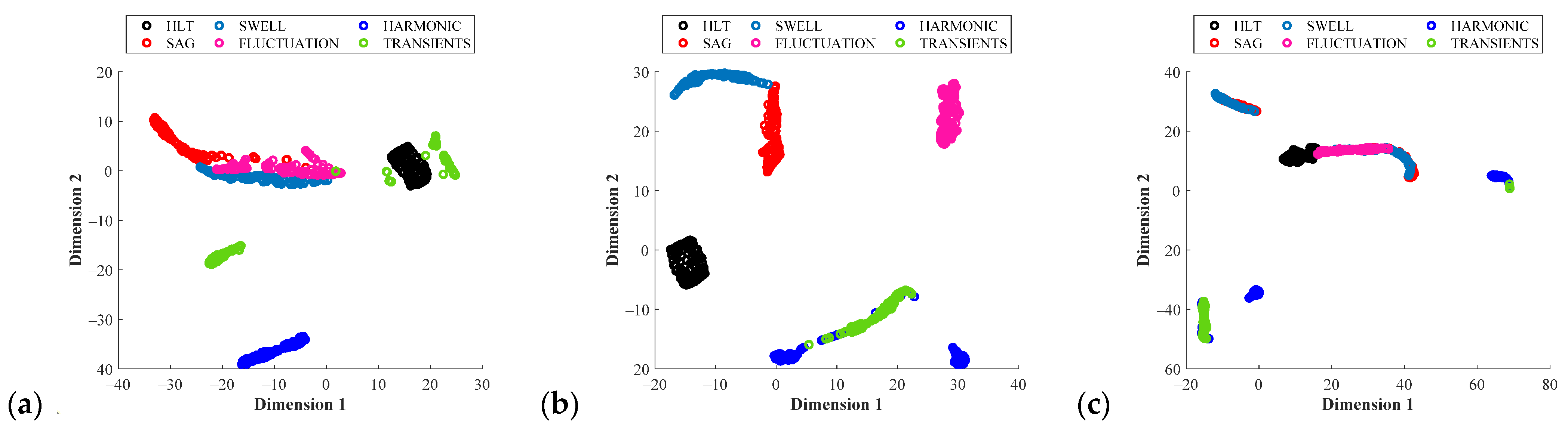
The results reported in this work show that when only one individual domain (time, frequency or time-frequency) is used for PQ analysis, the classification of the disturbances in the grid presents a low performance. This situation relies on the fact that there are many disturbances that present similar behaviors in a given domain. Nevertheless, it has been demonstrated that when the multi-domain approach is implemented, the classification results are improved, because the similitudes that exist in one domain do not appear in a different one. However, when a multidomain approach is used, the number of features that describe a singular PQD considerably grows. Hence, the detection and classification tasks become more complicated and require of a high computational effort. In this sense, the proposed methodology proved that there are features that do not provide important information and, therefore, they can be discarded to reduce the dimensionality of the problem and to facilitate the classification task. Although that optimized feature selection may seem trivial, it is important to perform a proper selection of the features and be careful of not losing the features that provide relevant information. Thus, it is necessary to count with an indicator of the goodness of the selection. Additionally, it is important to carry out this task in an ordinated way to ensure the obtaining of a good result. In this sense, GA provides this structured feature searching, whereas the PCA brings the indicator of the goodness of the selection. Moreover, to make the classification task even simpler, SOM proved to be effective in the modeling of PQD, since they provide a 2-dimensional representation that is different for each disturbance. Finally, it is important to recall that the methodology is trained using synthetic signals; however, the approach is robust enough to also work with real signals. The proposed methodology allowed for detecting a series of PQD that occurred in a wind farm, proving effective in the detection of anomalies associated with wind generation. Then, by finding the existence of PQD that can produce a malfunction of the components of the machine, the proposed methodology aims to be a tool for detecting PQD and improving the reliability of the wind turbine by preventing the failure of any of its components. Moreover, having a priori knowledge of the disturbances related to wind generators, it is possible to take into consideration the design stage to prevent the appearance of these issues. Finally, if the disturbance appears when the machine is already working, with the proposed methodology, it is possible to take actions for corrective maintenance in order to ensure the proper working of all the grid elements.


 ,
, 




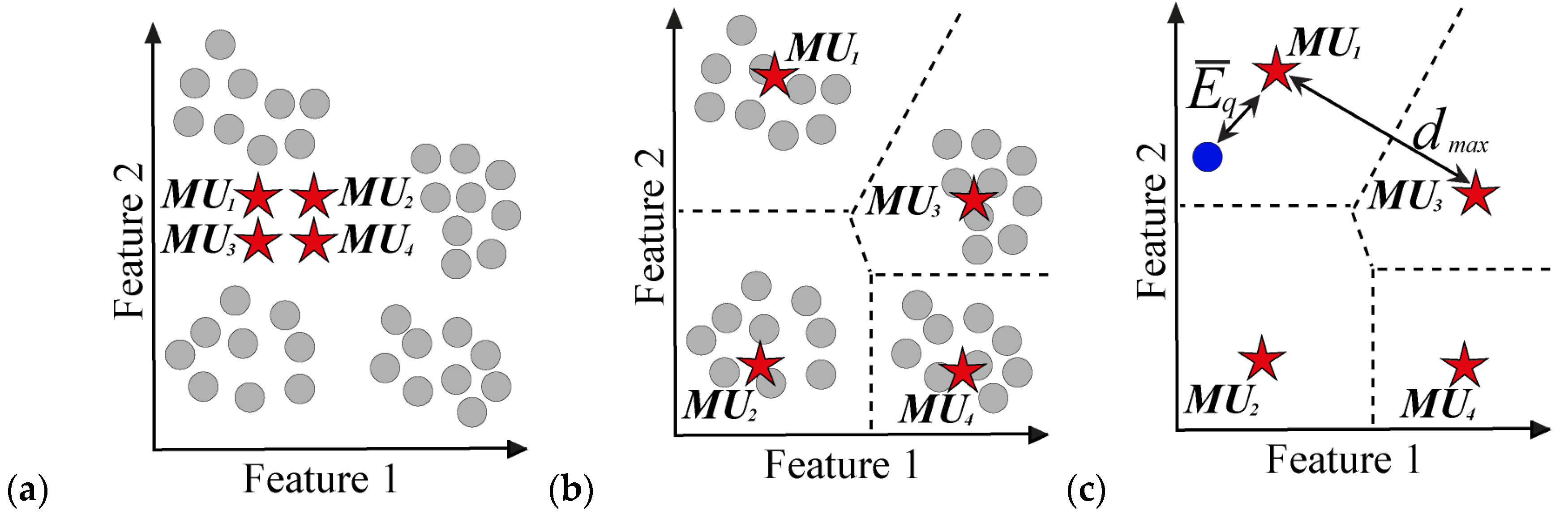
 , and a randomly initialized 2 × 2 neuron grid,
, and a randomly initialized 2 × 2 neuron grid,  . (b) Resulting training procedure, where, the dotted lines represent the assigned memberships regions of the matching units considering Euclidian distances. The maximum distance between MUs, dmax, corresponds with MU1 and MU3. (c) Assessment of a new input data sample,
. (b) Resulting training procedure, where, the dotted lines represent the assigned memberships regions of the matching units considering Euclidian distances. The maximum distance between MUs, dmax, corresponds with MU1 and MU3. (c) Assessment of a new input data sample,  . Assignation to MU1 as closest matching unit with the corresponding individual quantization error .
. Assignation to MU1 as closest matching unit with the corresponding individual quantization error .












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}