1. Introduction
The increasing global energy demand over the last 20 years means that electric energy is gaining more and more importance in our daily lives [
1,
2,
3]. Furthermore, when taking into account the imminent emergence of the electric vehicle (EV) [
4,
5,
6], there is no doubt that the electric energy sector will be of great importance in the immediate future. Inside the electric energy sector, the power converter is a key device whose design and behavior directly affect its efficiency, its cost, and the size of the final solution. Therefore, over the last decade, with the aim of improving converter performance, partial power processing (PPP)-based strategies have been presented as promising solutions regarding power converter downsizing and system efficiency improvements. PPP strategies aim to reduce the amount of power that needs to be processed by the power converter. To explain this,
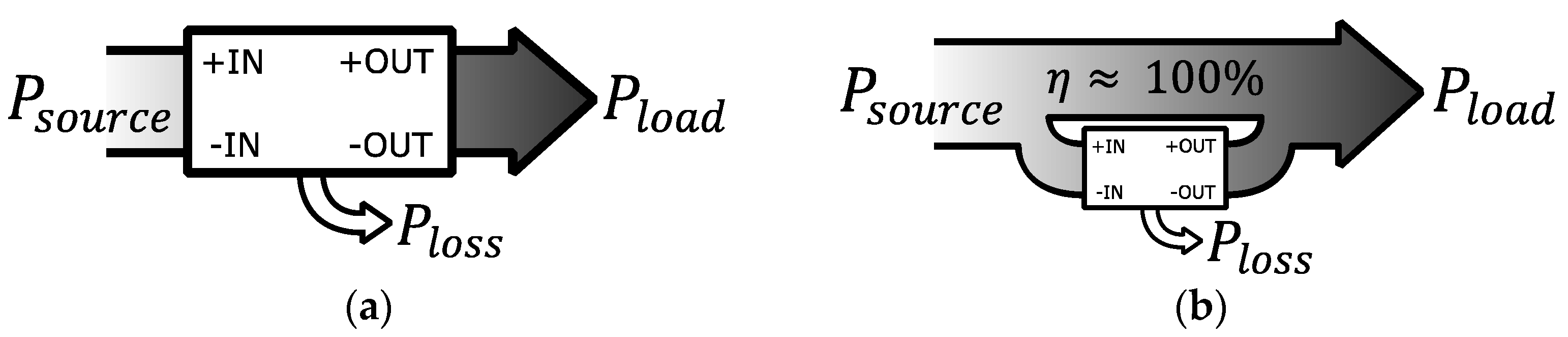
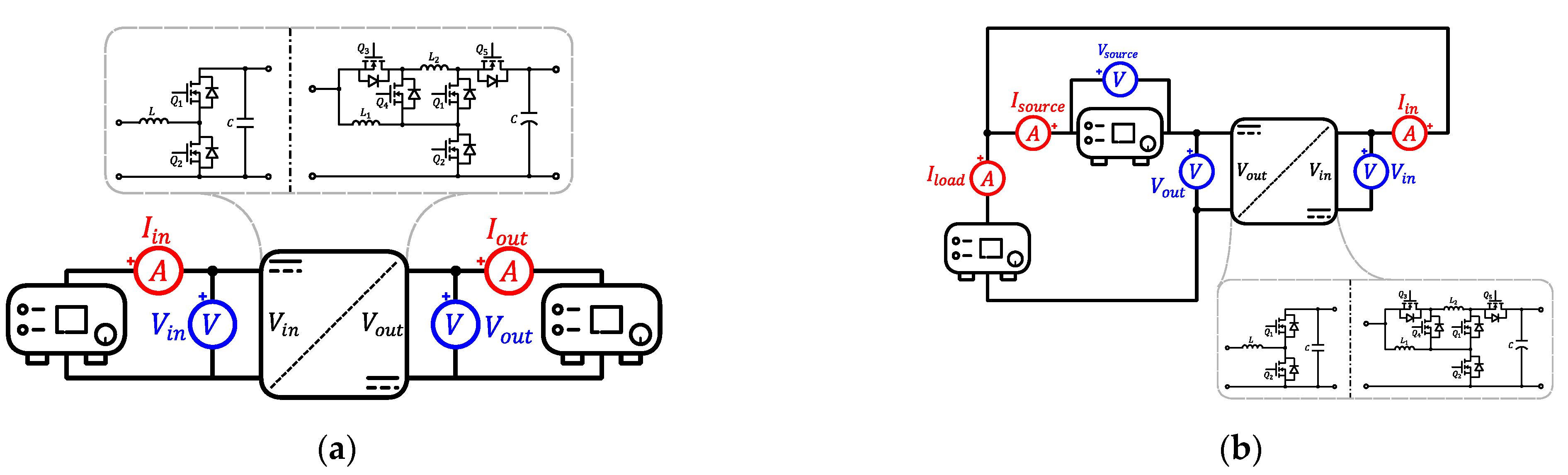
Figure 1 presents a power flow comparison between a full power processing (FPP) solution and a PPP solution. As can be observed, an FPP converter (
Figure 1a) processes 100% of the source power, generating a given quantity of losses. However, a PPP (
Figure 1b) converter only processes a fraction of the power that flows from the source to the load. This allows for a reduction in the size and power losses of the converter. According to the literature, three different types of PPP strategies exist for DC–DC applications [
7]: differential power converters (DPCs), partial power converters (PPCs), and mixed strategies. On the one hand, DPCs are aimed at correcting current imbalances that exist between different elements connected in series to a common voltage bus [
8,
9]. On the other hand, PPCs’ main goal is to control the power flow between a source and a load with different voltage or current levels [
10,
11]. Finally, the mixed strategies group contains different solutions that can offer better performance than DPCs and PPCs under specific conditions.
Focusing on PPCs, there exist two main groups: the architectures that, in order to avoid a short-circuit, require isolated topologies and the ones that do not. Regarding the first group, many different authors have achieved reduced sizes and more efficient solutions. For example, authors in [
12] prove that PPP can be achieved with a PPC architecture if an adequate isolated topology is implemented; for example, a phase shifted full bridge (PSFB). Additionally, [
13] concludes that a dual active bridge (DAB) topology implemented on a PPC architecture achieves a reduced electrical stress and efficiency improvement in comparison to its FPP counterpart. However, when it comes to implementing non-isolated topologies on PPC architectures, the authors of [
10,
14,
15] show that using a buck-boost topology on a PPC architecture results in FPP rather than PPP.
Regarding non-isolated DC–DC topologies, the literature presents many different solutions. On the one hand, authors in [
16] present and compare non-isolated DC–DC converters for renewable applications. On the other hand, authors from [
17] review the main high-gain DC–DC topologies and address their main challenges. Additionally, the authors of [
18] present single- and multi-stage DC–DC converters for EV applications.
Bearing this in mind, the present paper aims to extend the analysis of non-isolated topologies implemented on PPC architectures that achieve PPP. To be more precise, it aims to prove that certain DC–DC, non-isolated topologies can improve their performance when implemented on a PPC architecture. Indeed, there exists a lack of analysis around non-isolated topologies on PPC architectures. The authors of [
19] conclude that a double-inductor topology can achieve PPP, but they do not demonstrate it experimentally. Thus,
Section 2 starts by describing the PPC architecture that will be implemented for this analysis. Then,
Section 3 and
Section 4 simulate and compare two different non-isolated topologies implemented on a PPC architecture. Next,
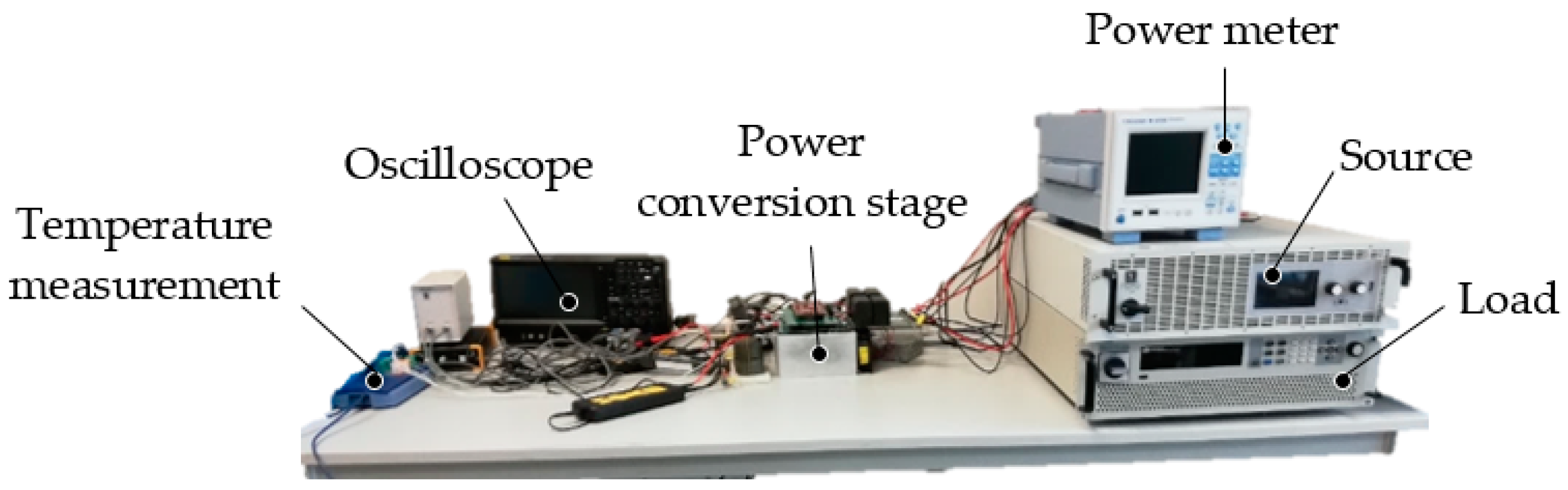
Section 5 confirms the results experimentally obtained through the simulations. Finally,
Section 6 discusses how PPP was achieved with one of the topologies presented previously and
Section 7 presents our conclusions.
2. PPC Architecture Description
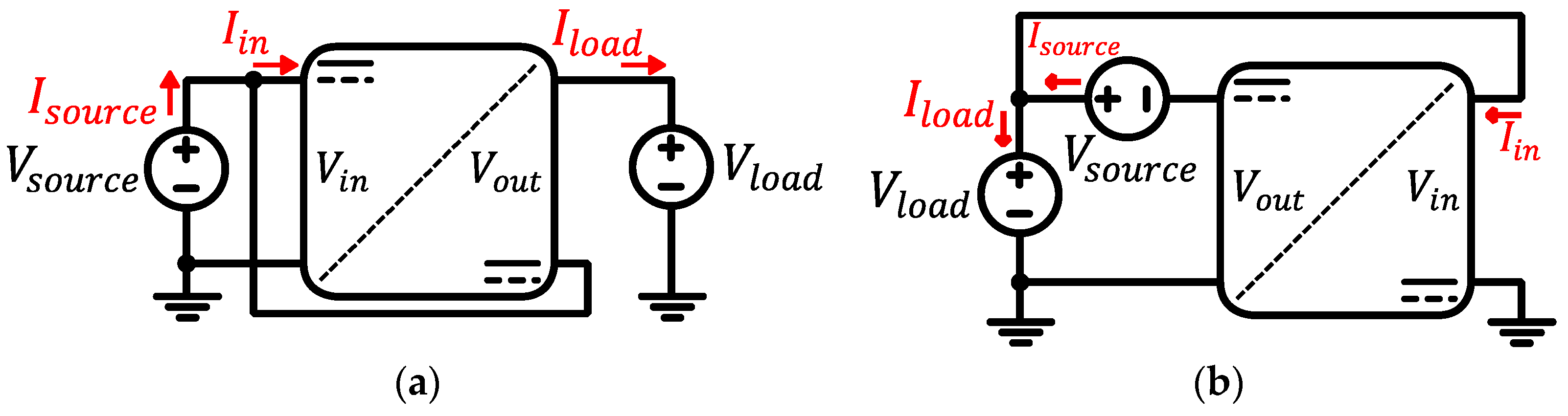
Inside PPC architectures, there exist two main groups: the ones that, in order to avoid a short circuit, require isolated topologies (
Figure 2a) and the ones that do not (
Figure 2b). Architectures that require isolated topologies are known as input-parallel-output-series (IPOS) and if a non-isolated topology is implemented in one there exists the risk of short-circuiting
. Regarding the architectures that permit non-isolated topologies, the authors of [
20] present them as fractional converters (FC).
Figure 2b presents an FC-type PPC for a voltage step-up application.
As can be observed, there exists no risk of short-circuiting any of the sources if a non-isolated topology is implemented. On the other hand, the processed power ratio of the converter
achieved by the FC is defined as Equation (1). It can be seen that it consists of the division between the power processed by the converter
and the source power
. Analyzing Equation (1), it can be concluded that the FC is limited to a working operation range where
. Indeed, if this condition is fulfilled, the obtained
is lower than 1, which means that the power processed by the converter is lower than that supplied by the source. However, when
exceeds a value of 2, the resulting
is higher than 1. This means that the power converter is out of the PPP region and all the benefits are lost.
where
,
, and
are the input power, voltage, and current of the converter, respectively,
,
, and
are the source power, voltage, and current, respectively, and
is the static voltage gain of the application
.
As mentioned before, this paper aims to analyze the behavior of non-isolated topologies when they are implemented on a PPC architecture— on an FC, to be more precise. To this end, two different case studies are proposed: a single-inductor topology and a double-inductor topology. The reason for selecting these two topologies is their simplicity. The single inductor consists of a well-known topology, the half-bridge (HB). On the other hand, the double-inductor topology is the modified switched inductor boost converter (MSIBC). This topology works in a similar way to the HB, but it is capable of parallelizing or serializing the inductors. Other multi-stage or resonant non-isolated topologies are not considered due to their complexity and number of components.
3. Single Inductor Topology Case Study
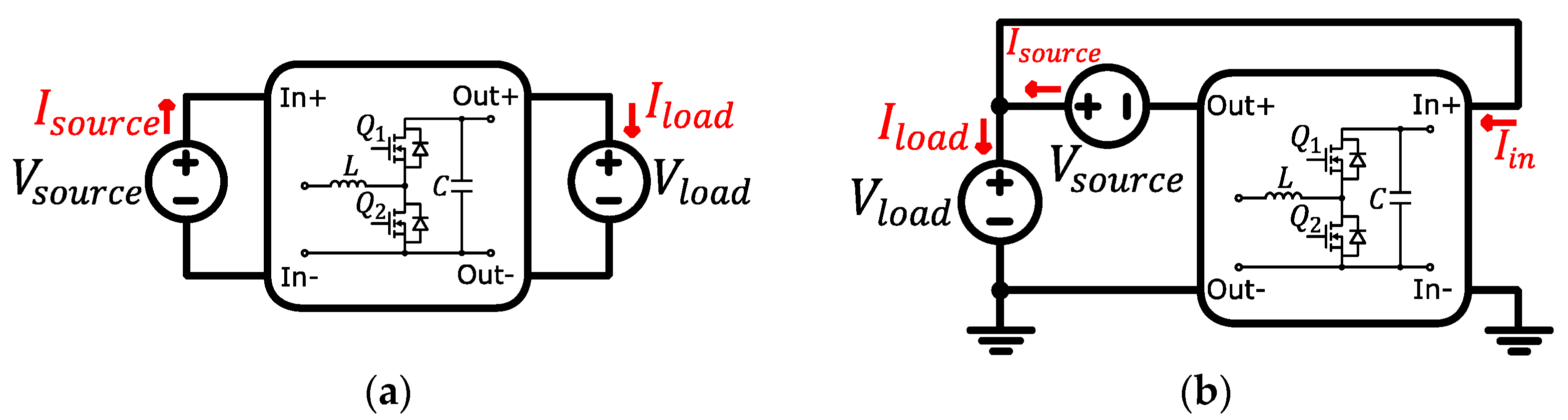
The present section will focus on the analysis of a conventional single-inductor topology: a HB. With the aim of observing the benefits that the FC architecture may present,
Figure 3a,b show a comparison of two circuits: a full power converter (FPC)-HB and a PPC-HB, respectively.
Table 1 presents the main electrical parameters that define the simulation conditions. As can be observed, the defined source and load voltage levels result in a
value of 1.25, which meets the
working condition.
The values defined in
Table 1 and
Table 2 describe the design parameters of each of the solutions presented in
Figure 3. Comparing the results from both solutions, the first difference that exists between them is the input/output voltage levels. In the case of the FPC-HB, they correspond to the source and load values. However, the input voltage of the PPC-HB is proportional to the load and the output consists of the difference between the source and the load. Regarding the
, it is expected to be a quarter in the PPC case, achieving a maximum processed power of 375 W in the converter. Moreover, the power flow inside each solution provokes two different working conditions. On the one hand, the FPC-HB will work as a boost, whereas the PPC-HB will work as a buck. Finally, with the aim of maintaining a fair comparison, the same storage elements and semiconductors are implemented in both cases.
Before analyzing the simulation results, it is important to mention that only semiconductor power losses are considered in the simulated circuits. Indeed, the passive elements are considered ideal and their internal resistances are neglected. Thus, in order to calculate the theoretical switching losses of the semiconductors previously characterized curves have been used.
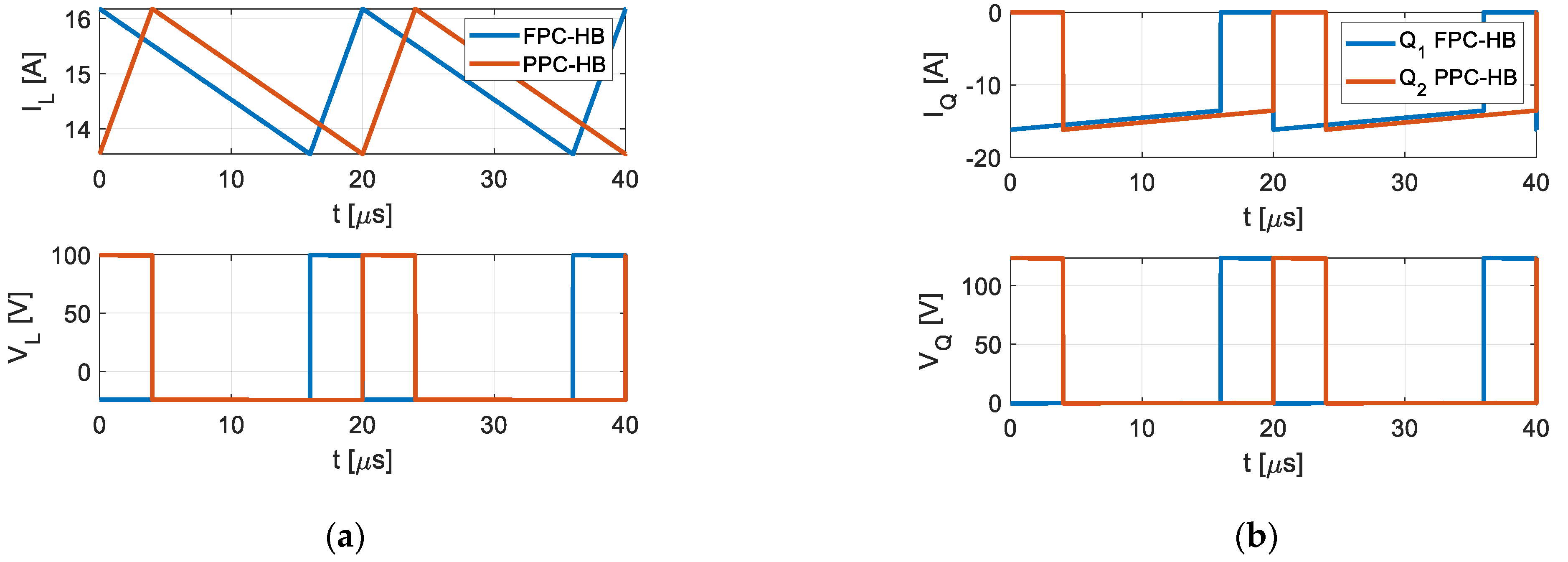
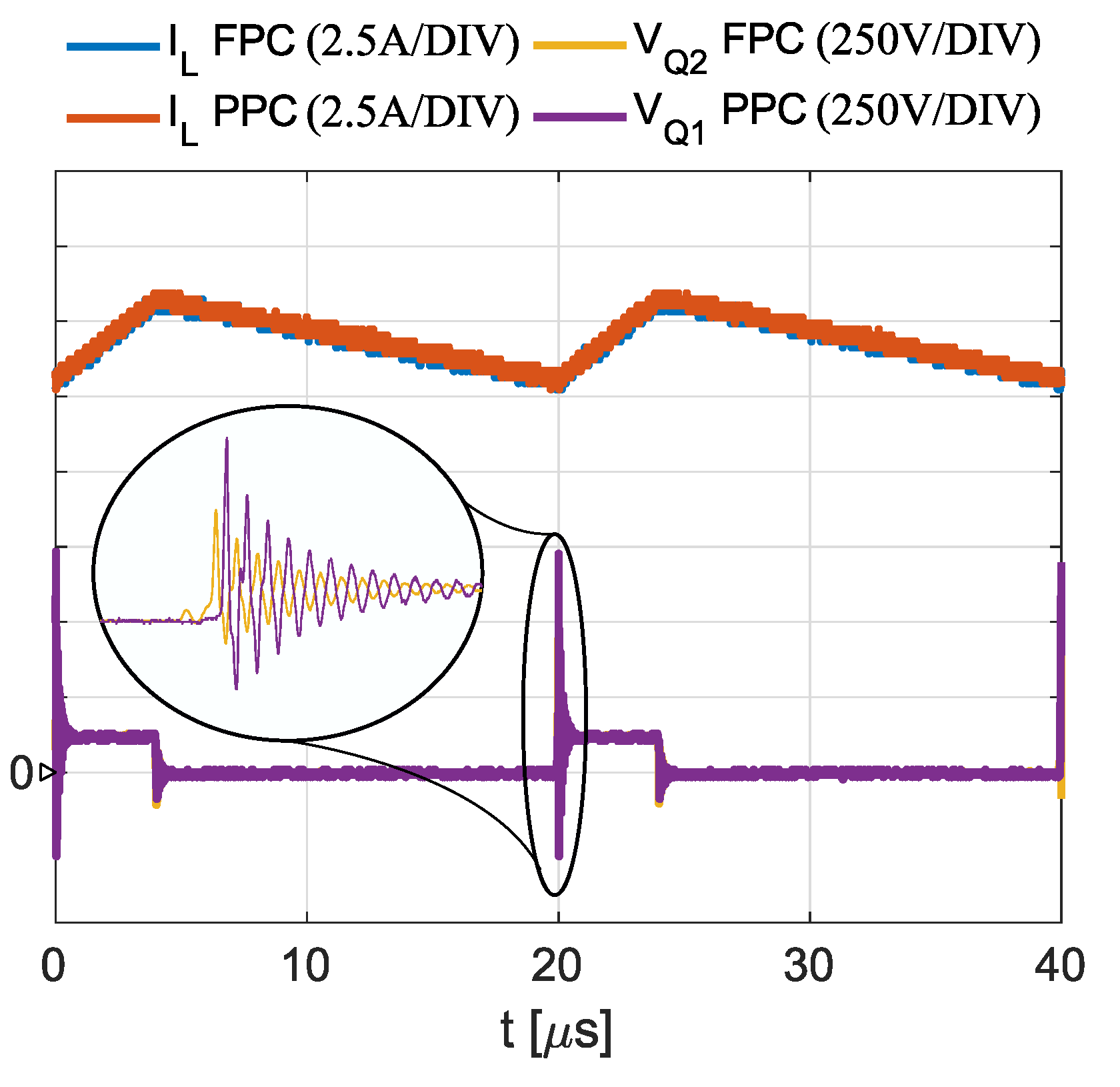
Figure 4a presents inductor voltage and current waveforms in the steady-state. It can be observed that both architectures attain the same inductor voltage and current levels. In addition, the current ripple obtained by each solution is exactly the same.
Figure 4b presents the current and voltage waveforms of the semiconductors. Due to the fact that each HB is working in a different mode (boost and buck, respectively), their results are different. The same conclusion is obtained when it comes to the capacitor; the capacitor current and voltage waveforms obtained by both solutions are identical (
Figure 4c). In conclusion, it is observed that the PPC-HB does not offer any improvement in terms of current or voltage reduction. Indeed, it results in a conventional HB converter working in buck mode. These results demonstrate in a simple way that implementing a HB topology in an FC-type PPC architecture does not present any benefits.
Finally,
Table 3 presents the obtained power losses, efficiencies (system and converter), and
results. As can be observed, the converter efficiency obtained by the FPC-HB is higher than that obtained by the PPC-HB. However, when comparing the system efficiency, both achieve the same value. Note that due to the non-ideal circuit, the
is not exactly 0.25 as in the ideal circuit. The system and converter efficiencies of a PPC architecture are related to the
(Equation (2)). Regarding the power losses, as expected, they are equally distributed across both solutions. In conclusion, both solutions can be defined as identical.
where
and
represent the efficiency of the system and the converter, respectively.
4. Double Inductor Topology Case Study
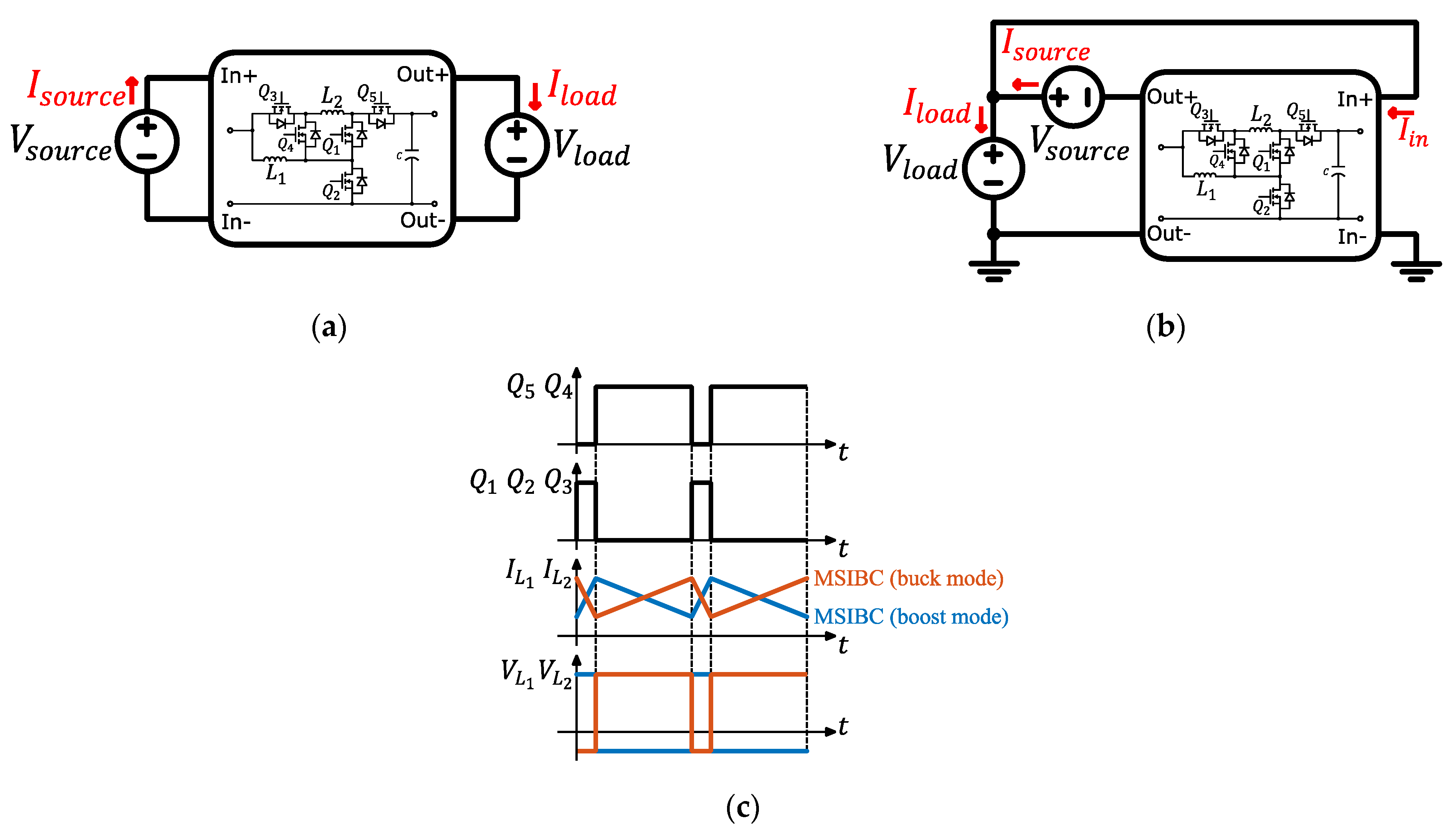
Similarly to the previous section, the present one aims to analyze the behavior of a double-inductor non-isolated topology when it is implemented on an FC architecture. For this case, a MSIBC is proposed [
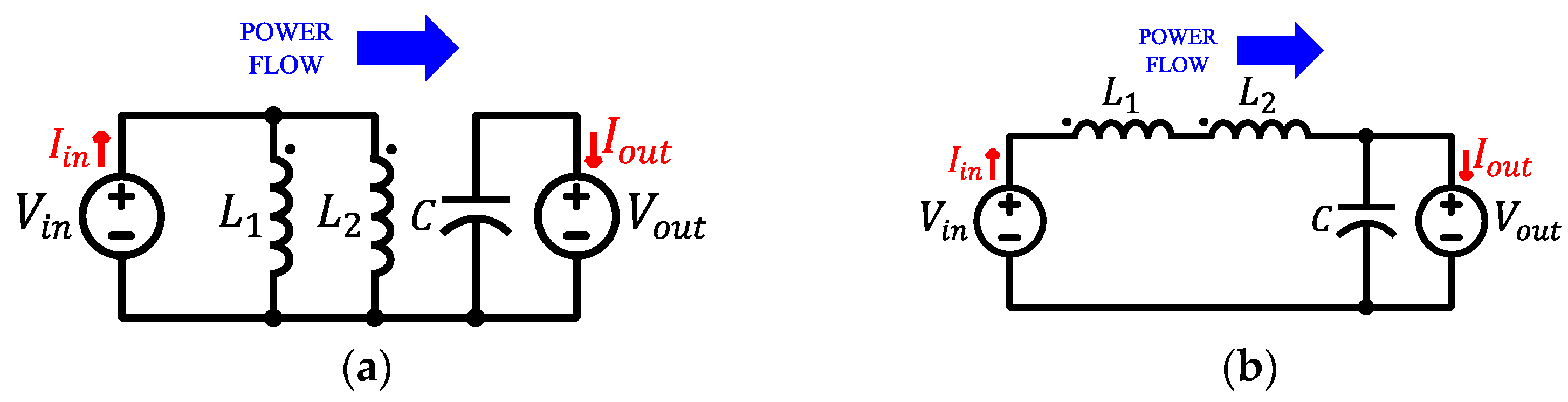
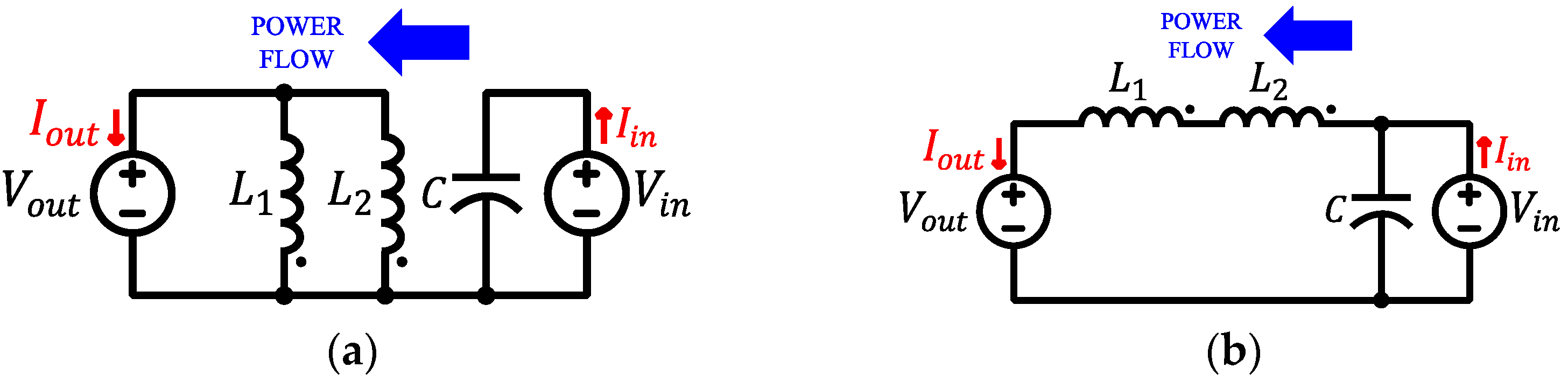
21]. This topology is recommended to achieve high voltage by using the principle of parallel charging and series discharging of inductors. Again, the two solutions to compare consist of an FPC-MSIBC and a PPC-MSIBC (
Figure 5a,b, respectively). With respect to the simulation conditions,
Table 4 presents the main electrical parameters.
The values defined in
Table 4 and
Table 5 describe the design parameters of each solution in
Figure 5. Again, the input/output voltage values and the operation mode of the power converter vary from the FPC-MSIBC to the PPC-MSIBC. When it comes to the passive and active components, compared to the single-inductor topology, the only value changed is that of the inductances, with each being half that of the single inductance.
In the same way as in the previous section, the developed simulations do not consider the switching losses; thus, these are obtained from previously characterized curves.
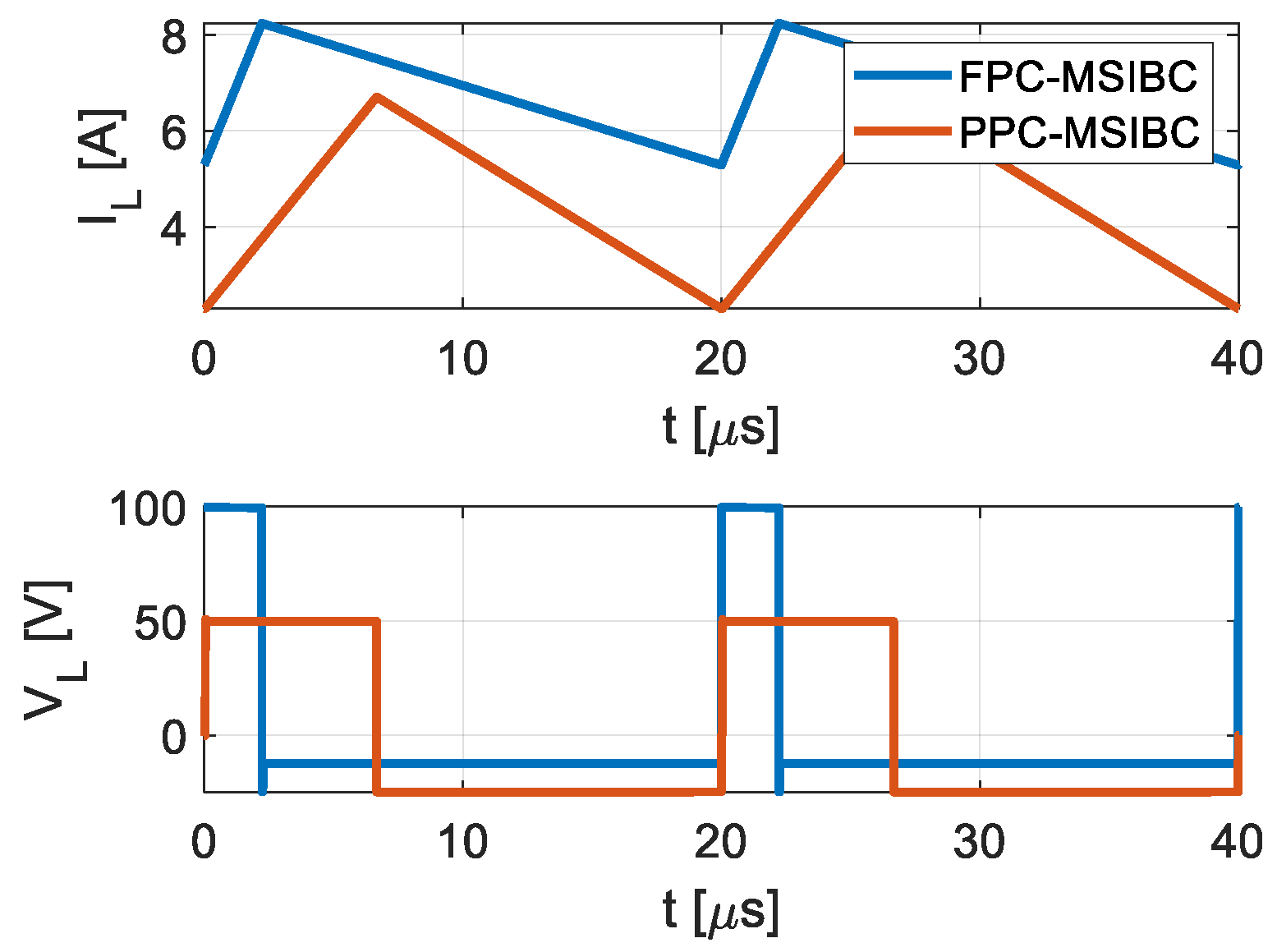
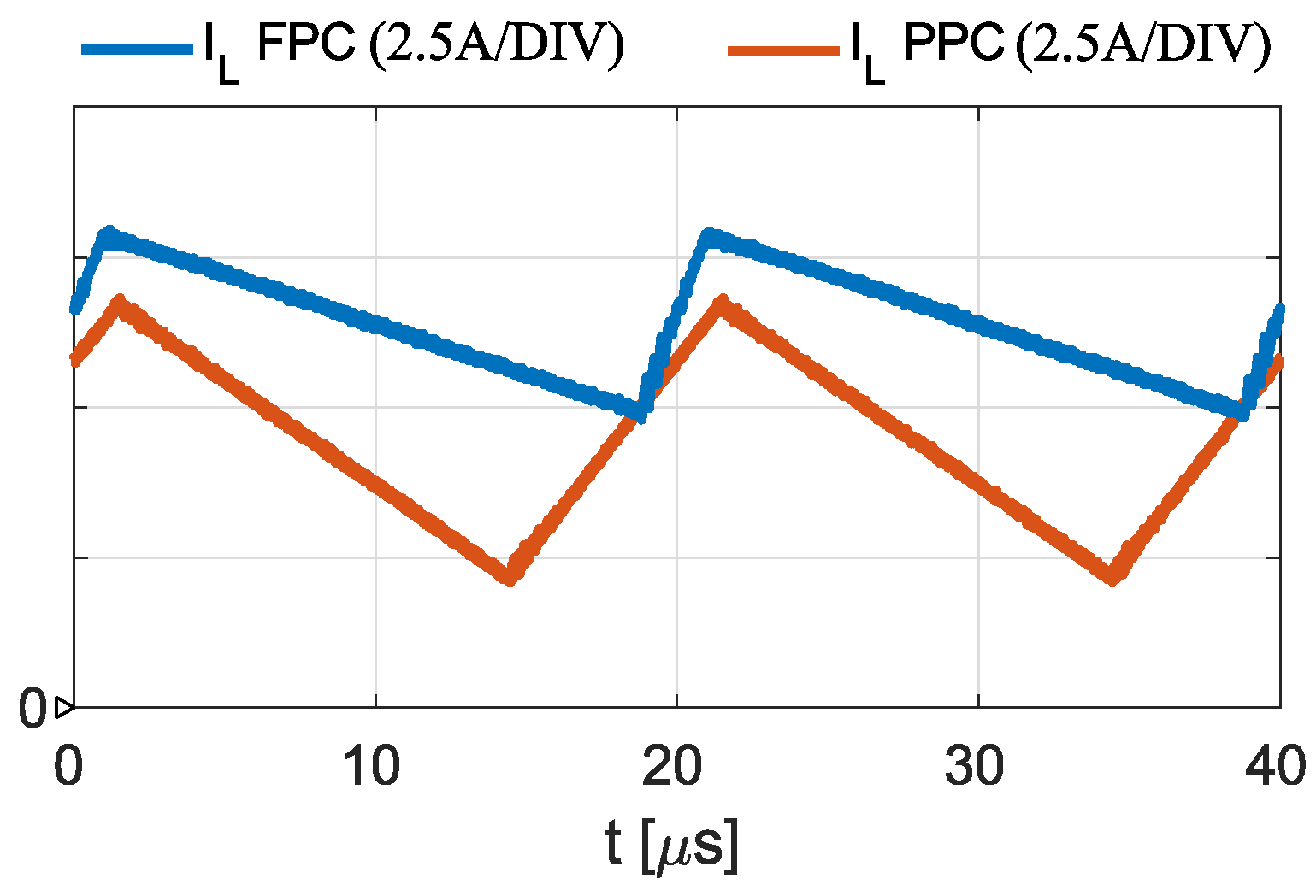
When it comes to the obtained results,
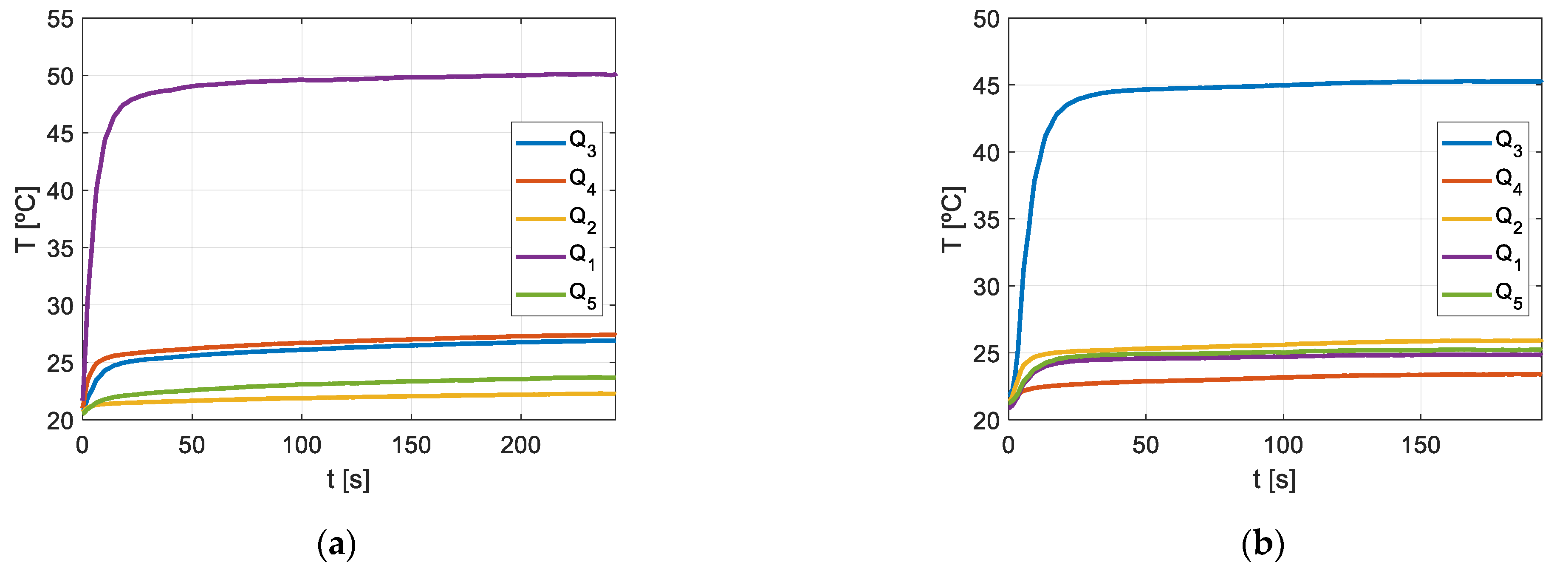
Figure 6 presents inductors’ current and voltage steady-state waveforms. Unlike the single-inductor comparison, the PPC-MSIBC attains a lower inductor RMS current than the FPC-MSIBC; 4.67 A and 6.8 A, respectively. This will directly affect the current that the semiconductors can handle.
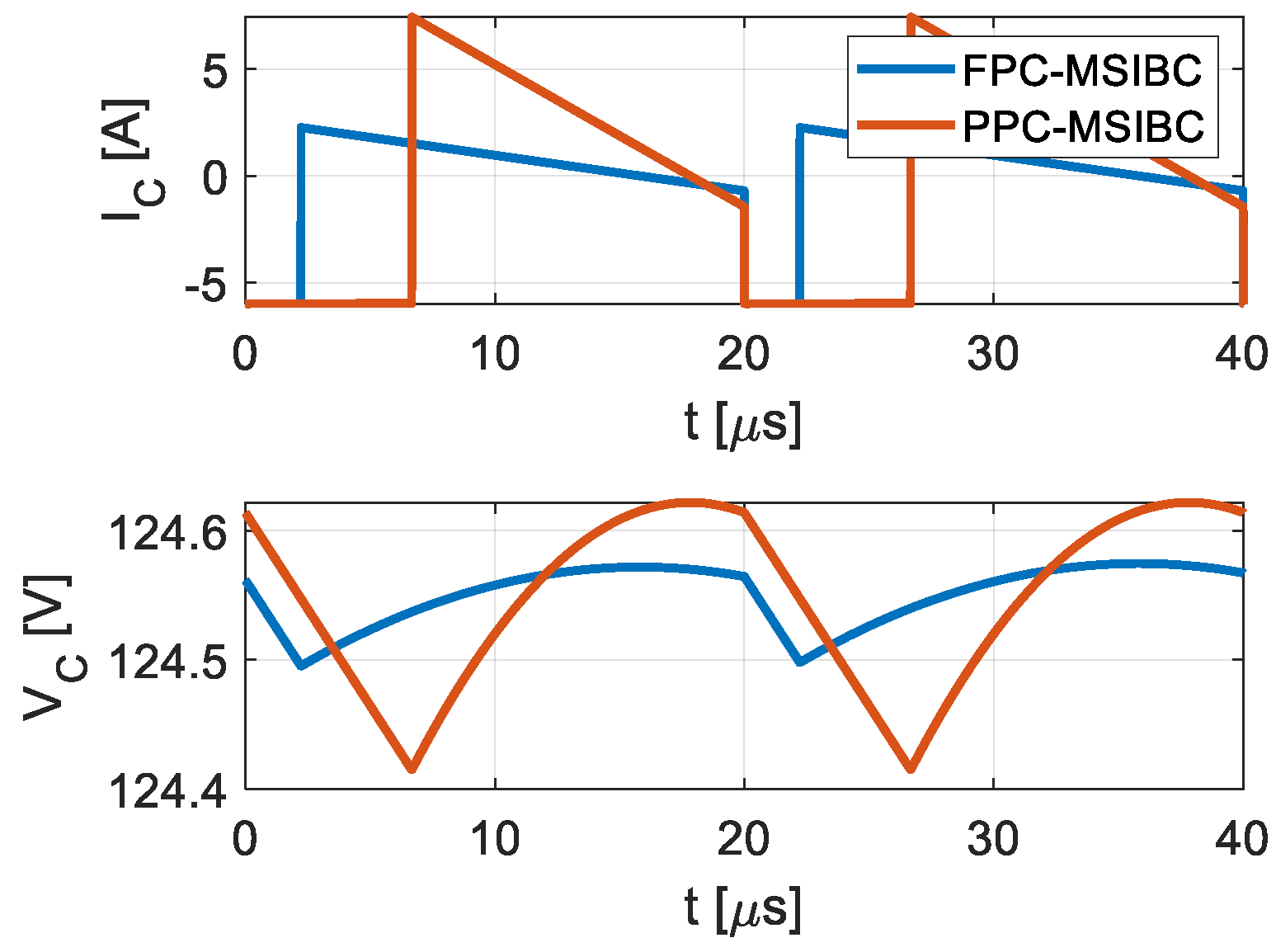
On the other hand, when it comes to the capacitor,
Figure 7 shows the voltage and current waveforms obtained by both architectures. In this case, the resulting capacitor RMS current of the MSIBC-PPC is higher than that of the MSIBC-FPC; 4.72 A and 2.27 A, respectively. As a consequence, for the same capacitance value the output voltage ripple is higher at the MSIBC-PPC. In short, for the MSIBC-PPC the current through the inductors is reduced, whereas at the output capacitor it is increased.
Finally,
Table 6 shows the power loss, efficiency (system and converter), and
results. Similar to the single inductor analysis, the converter efficiency obtained by the FPC-MSIBC is higher than that obtained by the PPC-MSIBC. However, in this case, the PPC-MSIBC achieves a better system efficiency. This means that the total amount of losses produced by the converter has been reduced by using an FC-type PPC architecture.
6. Discussion
The present section aims to explain the reason we achieved PPP with a MSIBC and not with a HB. With this in mind, it is essential to compare the voltage observed by the inductor when it is implemented on an FPC and a PPC architecture.
In the first place, when it comes to the HB (see
Figure 15a), the voltage observed by its inductor can be defined by two switching states (Equation (3)).
Since the values of
,
, and
vary depending on the architecture in which the HB is implemented, the next step is to substitute them for their corresponding values. In the case of the FPC-HB,
and
(from
Table 2), whereas in the case of the PPC-HB,
and
(
Table 2). Regarding
, for both solutions it has a value of 0. The results are shown in Equations (4) and (5), where the same absolute voltage values are achieved with an FPC-HB and a PPC-HB. In conclusion, the voltage observed by the inductor does not change whether it is implemented on an FPC or a PPC architecture.
When it comes to the MSIBC (
Figure 15b), a different result is obtained. In this case, the inductors’ voltage is defined by Equation (6). It is divided by two at the second switching state due to the series connection of
and
.
The next step is to substitute
,
, and
for their corresponding values. In the case of the FPC-MSIBC,
and
(from
Table 5), whereas in the case of the PPC-MSIBC,
and
(from
Table 5). The obtained results are shown in Equations (7) and (8). As can be seen, the voltage observed by the inductors varies depending on whether they are implemented on an FPC or PPC architecture. As a consequence, the duty cycle at which the converter will work is affected (Equations (9) and (10)). More detailed information about the origin of Equations (9) and (10) is given in the appendix.
Comparing both duty cycles from (9) and (10), it can be observed that the one achieved by the FPC-MSIBC is more extreme (closer to 0), which involves an increase in the RMS current of the inductor and the other semiconductors.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















