
Piezoelectric Polymer-Based Collision Detection Sensor for Robotic Applications †

Abstract
:1. Introduction
2. Design Methodology
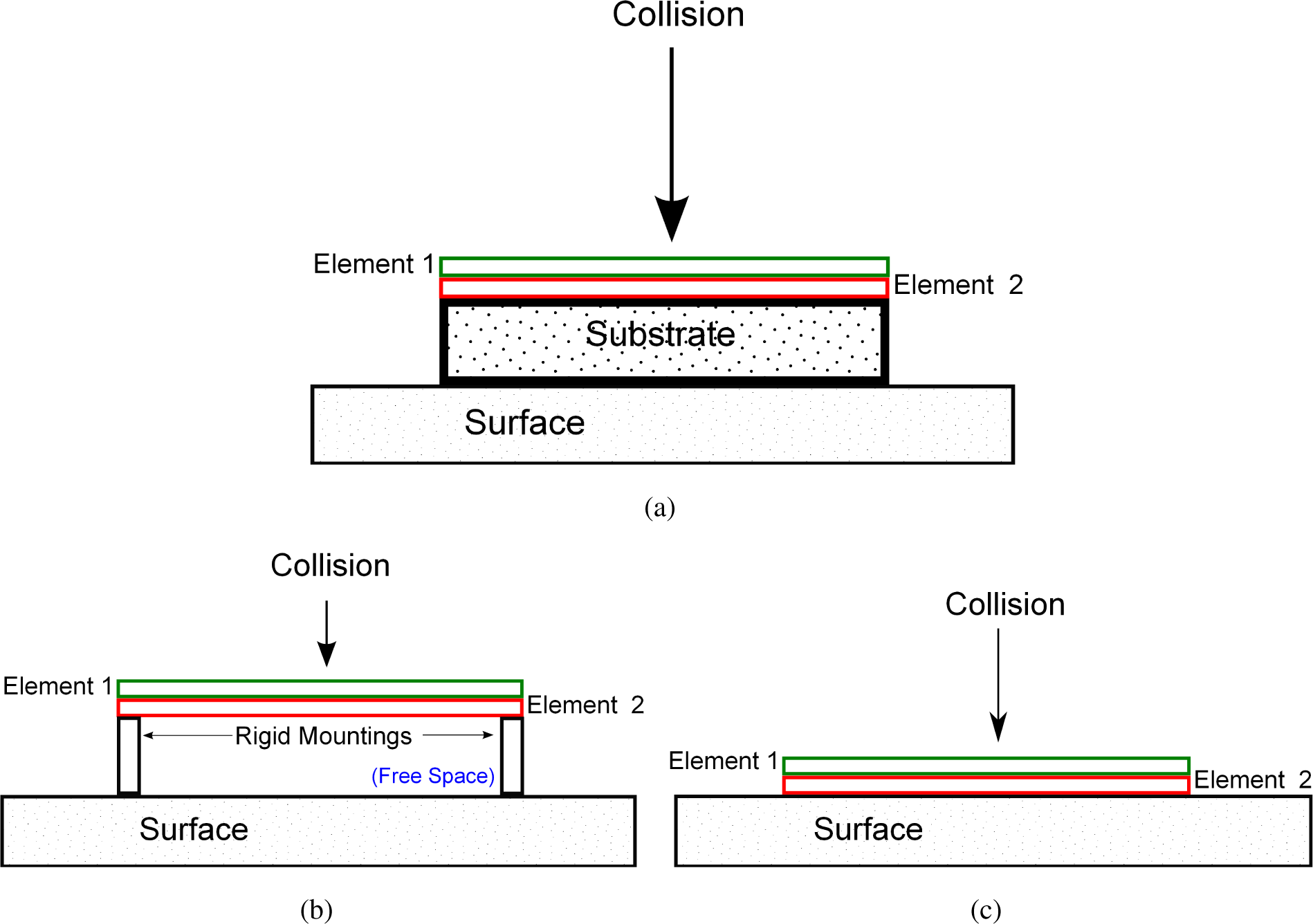
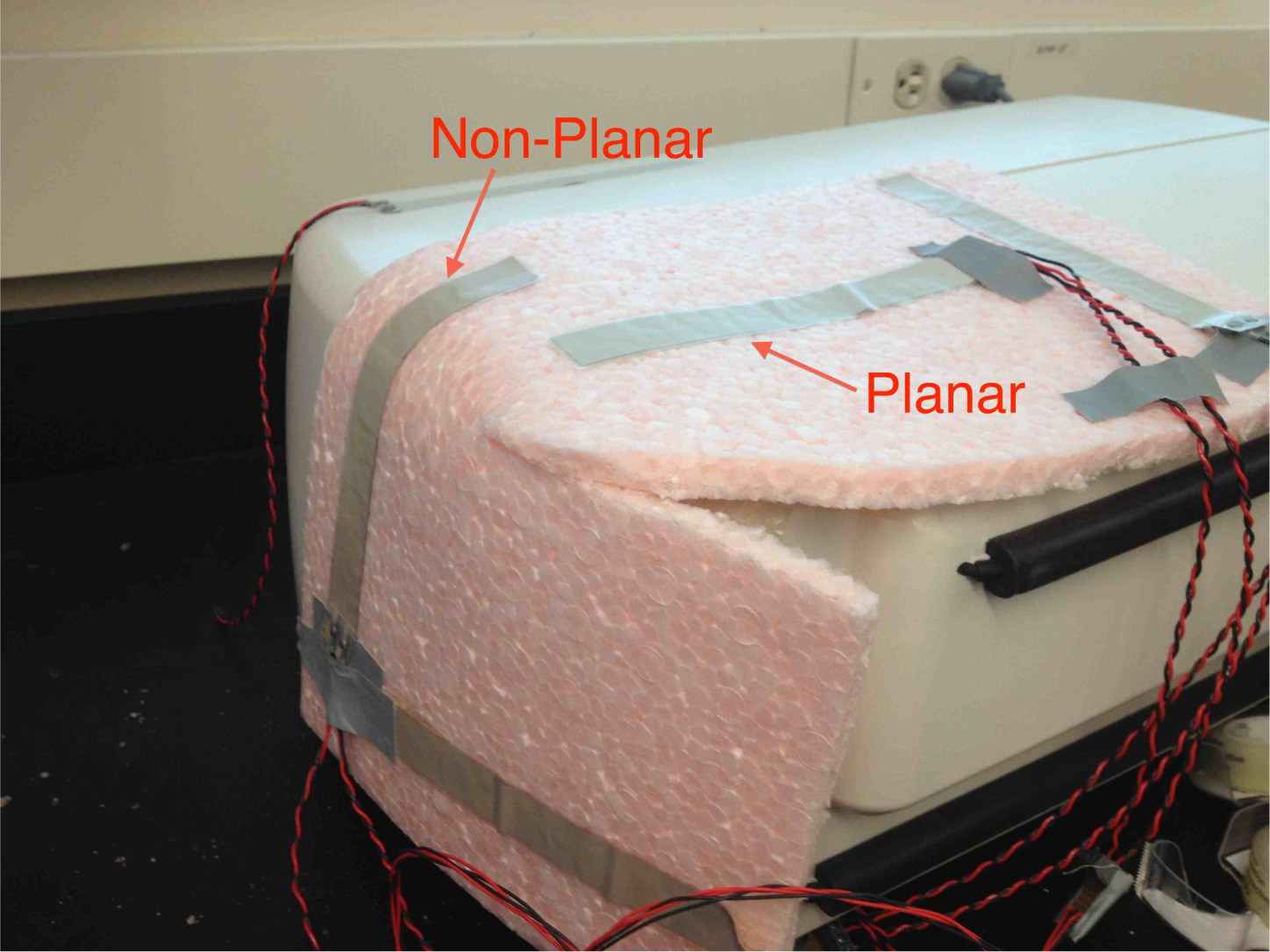
2.1. Materials and Structures
2.1.1. Sensor Structures Using PVDF Film
2.2. Sensing and Instrumentation
2.2.1. Piezoelectric Effect
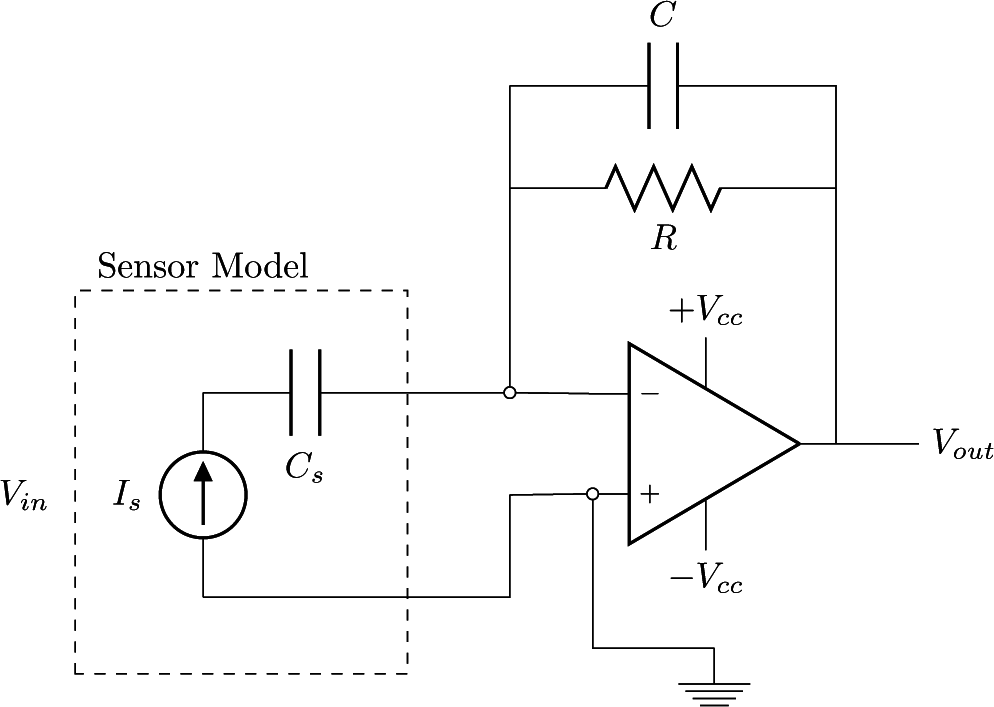
2.2.2. Electronics
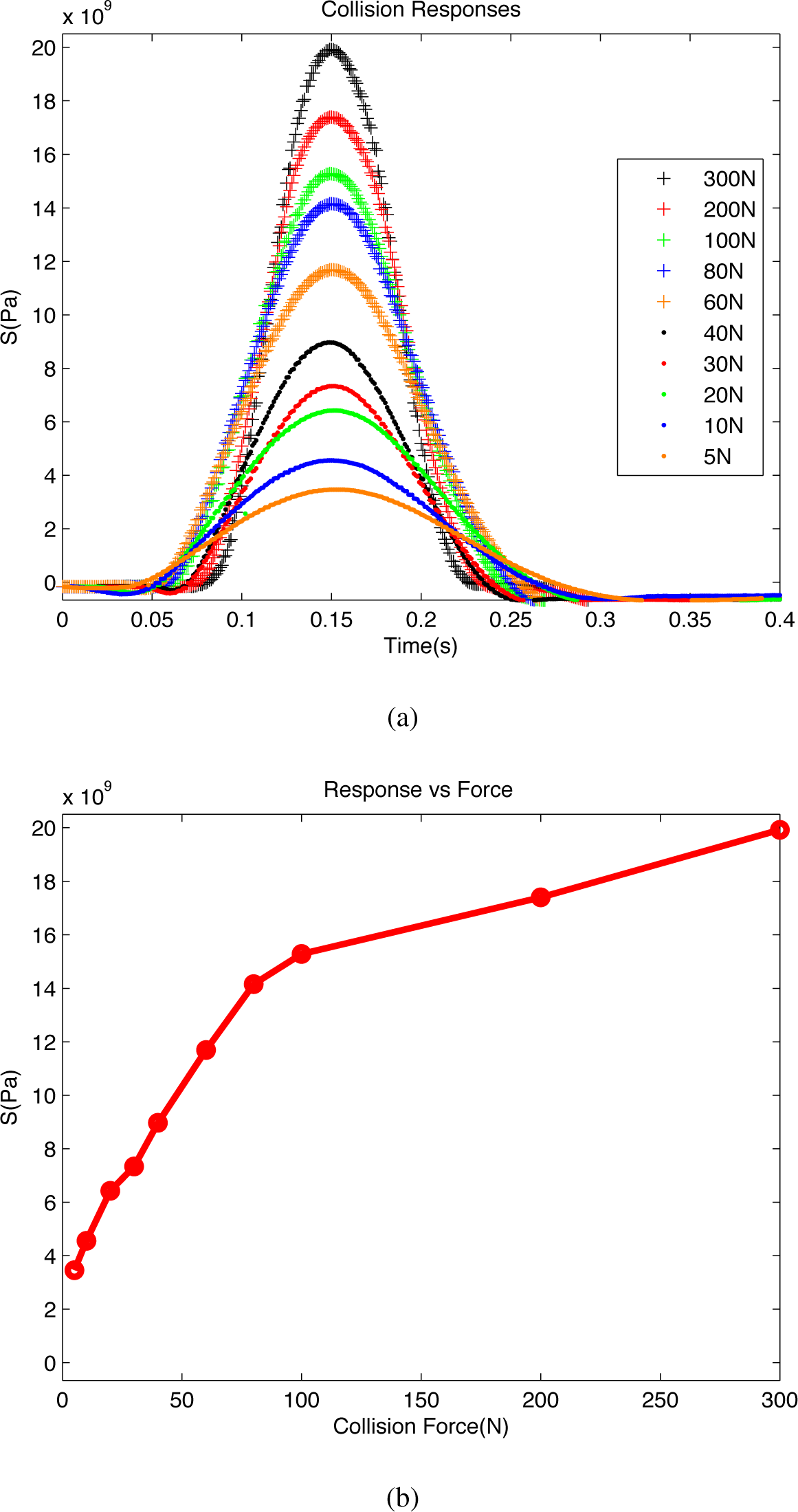
2.2.3. Strain Modeling
3. Experimentation
3.1. Prototype I
3.1.1. Testing Method
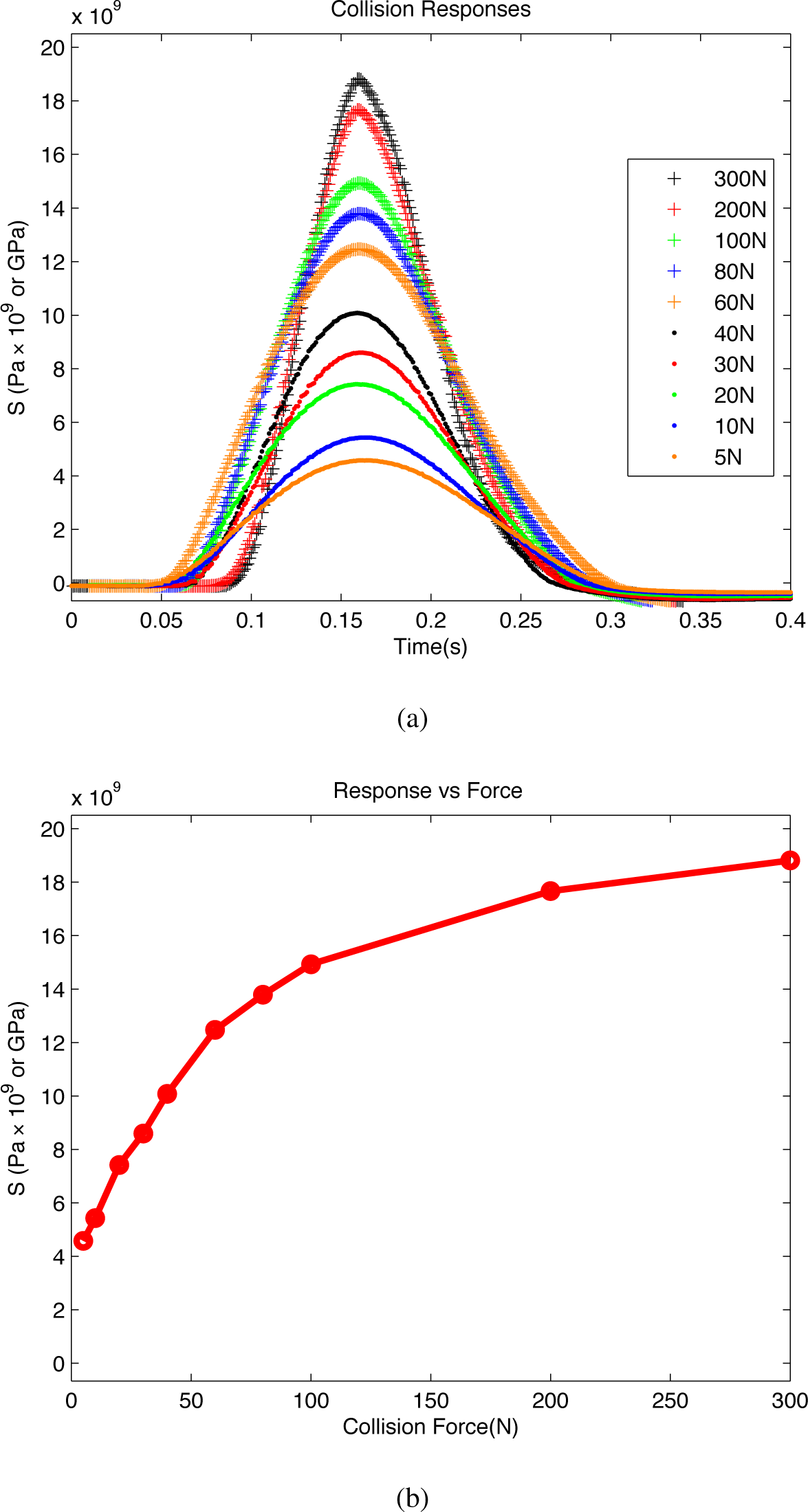
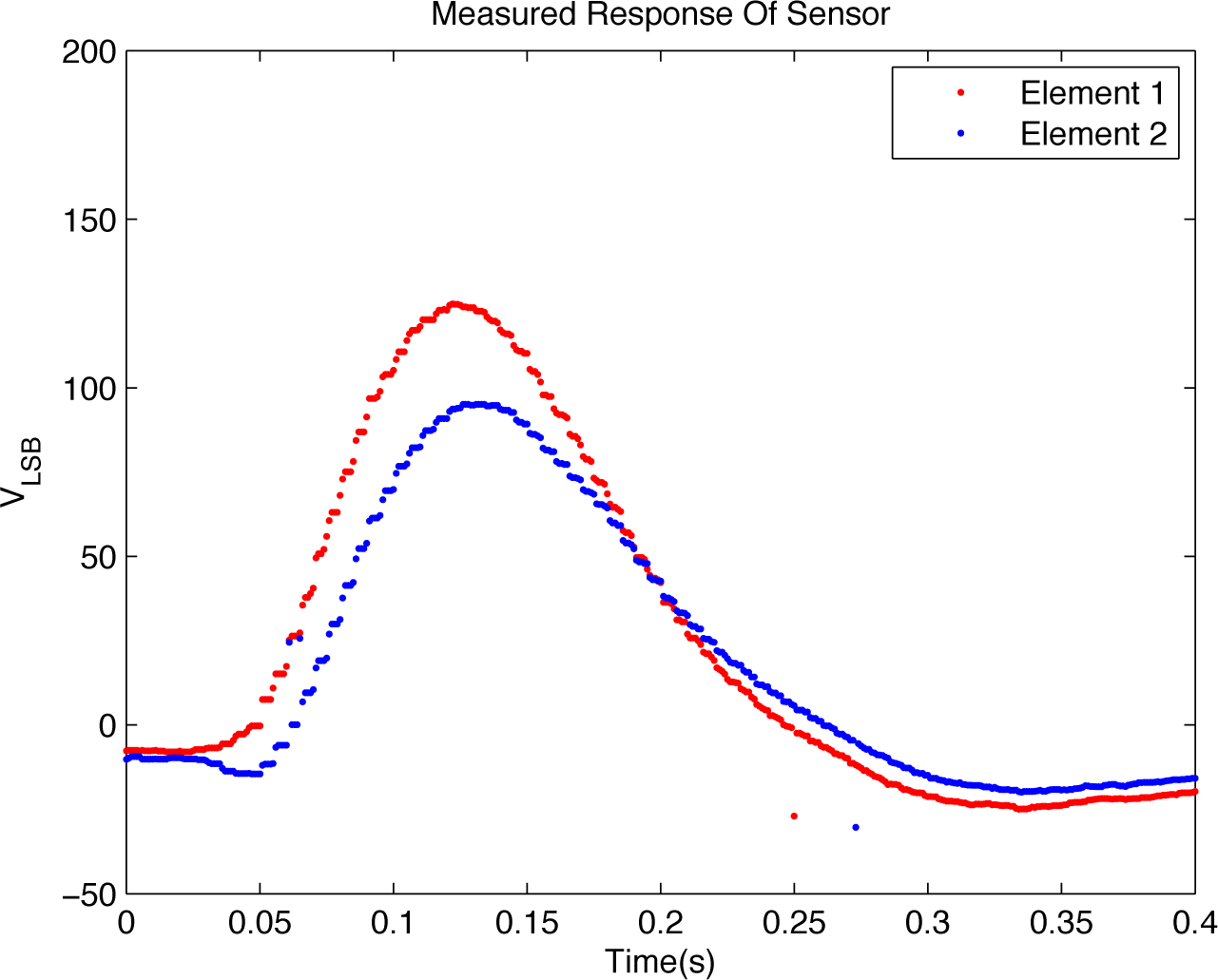
3.1.2. Results and Discussion
3.2. Prototype II
3.2.1. Testing Method
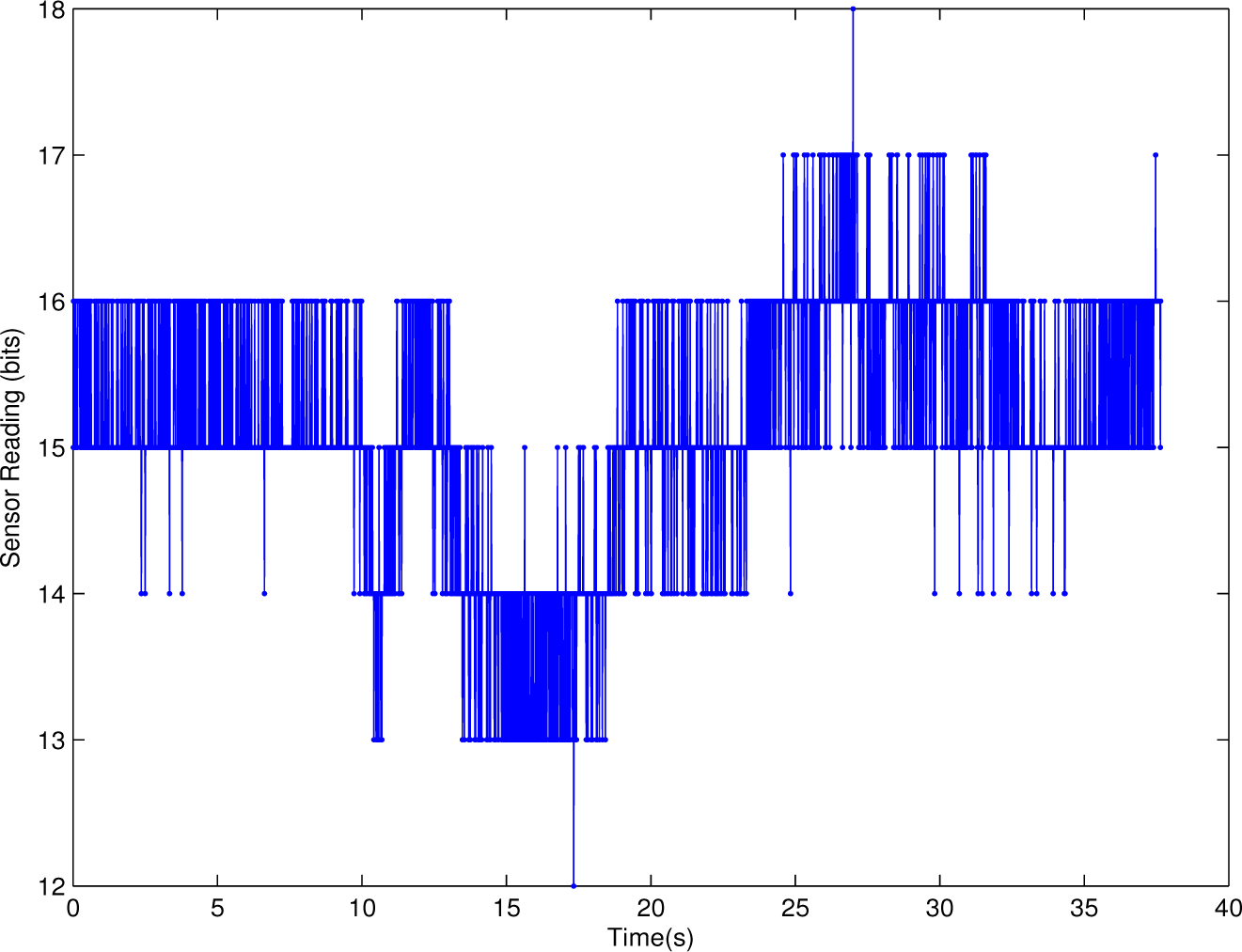
3.2.2. Normal Operation
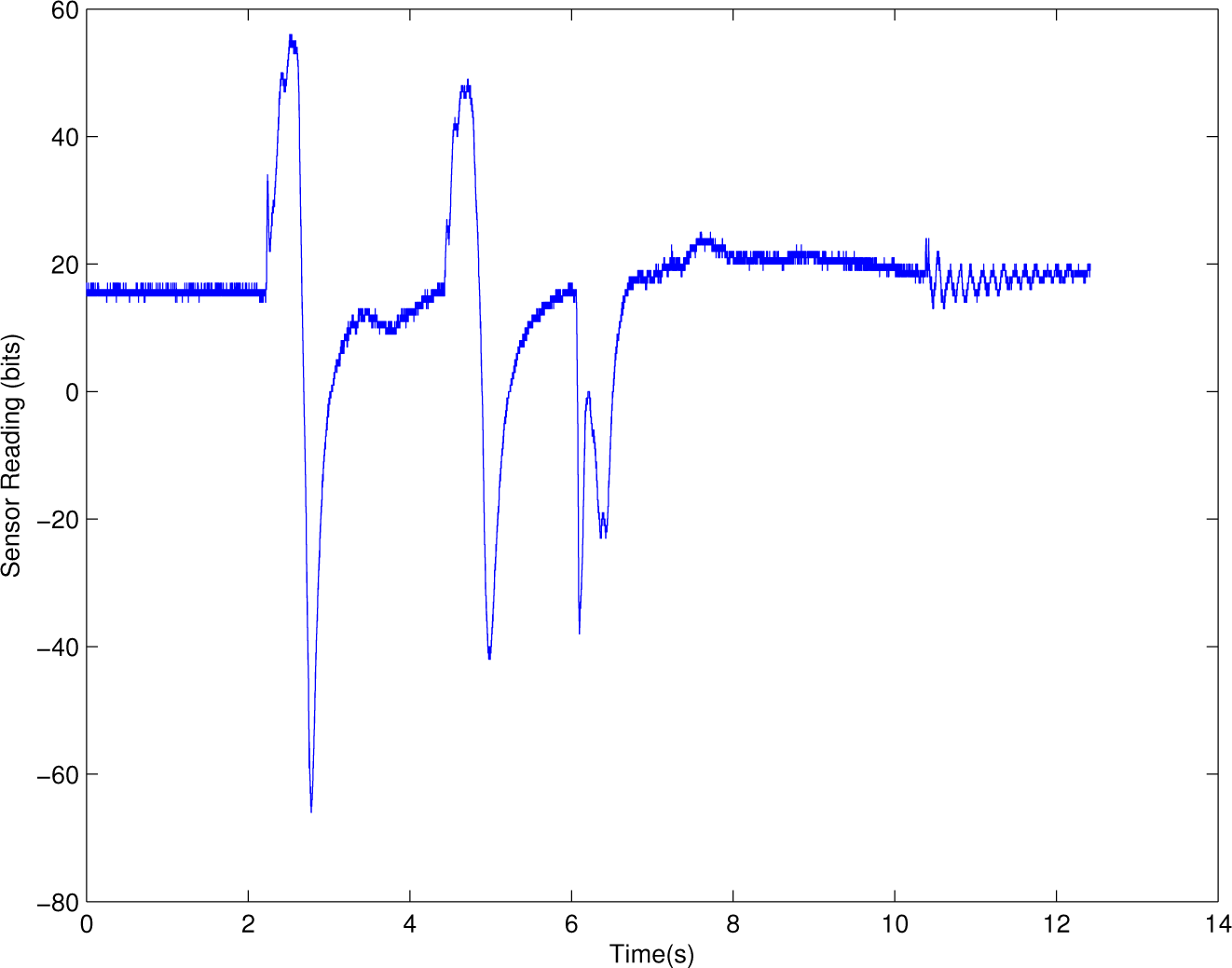
3.2.3. Collision Perception
3.2.4. Emergency Stop Detection
3.2.5. Dynamic Movement with Collisions and Emergency Stop
4. Concluding Remarks
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fujimoto, I.; Yamada, Y.; Morizono, T.; Umetani, Y.; Maeno, T. Development of artificial finger skin to detect incipient slip for realization of static friction sensation, Proceedings of IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI-2003), Tokyo, Japan, 30 July–1 August 2003; pp. 15–20.
- Seminara, L.; Pinna, L.; Valle, M.; Basirico, L.; Loi, A.; Cosseddu, P.; Bonfiglio, A.; Ascia, A.; Biso, M.; Ansaldo, A.; et al. Piezoelectric polymer transducer arrays for flexible tactile sensors. IEEE Sens. J 2012, 12, 1–4. [Google Scholar]
- Shapiro, Y.; Wolf, A.; Kósa, G. Piezoelectric Deflection Sensor for a Bi-Bellows Actuator. IEEE/ASME Trans. Mechatron. 2013, 18, 1226–1230. [Google Scholar]
- Kolesar, E.S.; Dyson, C.S. Object imaging with a piezoelectric robotic tactile sensor. J. Microelectromech. Syst. 1995, 4, 87–96. [Google Scholar]
- Lee, S.; Ahn, Y.; Prabu, A.; Kim, K. Piezoelectric Polymer and Piezocapacitive Nanoweb Based Sensors for Monitoring Vital Signals and Energy Expenditure in Smart Textiles. J. Fiber Bioeng. Inform. 2013, 6, 369–381. [Google Scholar]
- Kymissis, J.; Kendall, C.; Paradiso, J.; Gershenfeld, N. Parasitic power harvesting in shoes, Proceedings of the Second International Symposium on Wearable Computers, Pittsburgh, PA, USA, 19–20 October 1998; pp. 132–139.
- Pi, Z.; Zhang, J.; Wen, C.; Zhang, Z.; Wu, D. Flexible piezoelectric nanogenerator made of poly(vinylidenefluoride-co-trifluoroethylene) (PVDF-TrFE) thin film. Nano Energy 2014, 7, 33–41. [Google Scholar]
- Han, H.; Nakagawa, Y.; Takai, Y.; Kikuchi, K.; Tsuchitani, S. PVDF film micro fabrication for the robotics skin sensor having flexibility and high sensitivity, Proceedings of the 2011 Fifth International Conference on Sensing Technology (ICST), Palmerston North, New Zealand, 28 November–1 December 2011; pp. 603–606.
- Kanik, M.; Aktas, O.; Sen, H.S.; Durgun, E.; Bayindir, M. Spontaneous High Piezoelectricity in Poly(vinylidene fluoride) Nanoribbons Produced by Iterative Thermal Size Reduction Technique. ACS Nano 2014, 8, 9311–9323. [Google Scholar] [Green Version]
- Canavese, G.; Stassi, S.; Cauda, V.; Verna, A.; Chiodoni, A.; Marasso, S.; Cocuzza, M. Different scale confinements of PVDF-TrFE as functional material of piezoelectric sensor devices, Proceedings of the 11th IEEE Conference on Sensors (IEEE Sensors 2012), Taipei, Taiwan, 28–31 October 2012; pp. 1–4.
- Mirbagheri, A.; Dargahi, J.; Aghili, F.; Parsa, K. Finite element analysis of a membrane-type piezoelectric tactile sensor with four sensing elements, Proceedings of the 4th IEEE Conference on Sensors (IEEE Sensors 2005), Irvine, CA, USA, 30 October–3 November 2005; pp. 353–356.
- Dahiya, R.; Metta, G.; Valle, M.; Sandini, G. Tactile Sensing - From Humans to Humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar]
- Haddadin, S.; Albu-Schäffer, A.; de Luca, A.; Hirzinger, G. Collision detection and reaction: A contribution to safe physical Human-Robot Interaction, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS-2008), Nice, France, 2008; pp. 3356–3363.
- Roh, Y.; Varadan, V.; Varadan, V.K. Characterization of all the elastic, dielectric, and piezoelectric constants of uniaxially oriented poled PVDF films. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2002, 49, 836–847. [Google Scholar]
- Seminara, L.; Capurro, M.; Cirillo, P.; Cannata, G.; Valle, M. Electromechanical characterization of piezoelectric PVDF polymer films for tactile sensors in robotics applications. Sens. Actuators A: Phys. 2011, 169, 49–58. [Google Scholar]
- Damjanovic, D. Ferroelectric, dielectric and piezoelectric properties of ferroelectric thin films and ceramics. Rep. Prog. Phys. 1998, 61, 1267. [Google Scholar]
- Gere, J. Mechanics of Materials, 5th ed; Brooks/Cole Publishing: Belmont, CA, USA, 2001; p. 926. [Google Scholar]
- Bryson, J.A. Impact Response of Polyurethane. Ph.D. Thesis, Washington State University, 2009. [Google Scholar]
- International Standard Organization. Robots and Robotic Devices—Safety Requirements for Industrial Robots: Part 2: Robot Systems and Integration; Number ISO 10218-2:E; International Standard Organization: Geneva, Switzerland, 2011. [Google Scholar]
- International Standard Organization. Robots and Robotic Devices—Safety Requirements for Industrial Robots: Part 1: Robots; Number ISO 10218-1:E; International Standard Organization: Geneva, Switzerland, 2011. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Property | Value | Units |
|---|---|---|---|
| E | Young’s Modulus | 2–4 | nN/m2 |
| d31 | Transverse Coefficient | 23 | pC/N |
| d33 | Compressive Coefficient | −33 | pC/N |
| p | Pyroelectric Coefficient | 30 | µC/m2K |
© 2015 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wooten, J.M.; Bevly, D.M.; Hung, J.Y. Piezoelectric Polymer-Based Collision Detection Sensor for Robotic Applications. Electronics 2015, 4, 204-220. https://doi.org/10.3390/electronics4010204
Wooten JM, Bevly DM, Hung JY. Piezoelectric Polymer-Based Collision Detection Sensor for Robotic Applications. Electronics. 2015; 4(1):204-220. https://doi.org/10.3390/electronics4010204
Chicago/Turabian StyleWooten, J. Michael, David M. Bevly, and John Y. Hung. 2015. "Piezoelectric Polymer-Based Collision Detection Sensor for Robotic Applications" Electronics 4, no. 1: 204-220. https://doi.org/10.3390/electronics4010204
APA StyleWooten, J. M., Bevly, D. M., & Hung, J. Y. (2015). Piezoelectric Polymer-Based Collision Detection Sensor for Robotic Applications. Electronics, 4(1), 204-220. https://doi.org/10.3390/electronics4010204