Preliminary Design of an Unmanned Aircraft System for Aircraft General Visual Inspection



Abstract
:1. Introduction
- -
- Provide an overall assessment of the condition of a structure, component, or system;
- -
- Provide early detection of typical airframe defects (e.g., cracks, corrosion, engine defects, missing rivets, dents, lightning scratches, delamination, and disbonding) before they reach critical size;
- -
- Detect errors in the manufacturing process;
- -
- Obtain more information about the condition of a component showing evidence of a defect.
- -
- Reduced aircraft permanence in the hangar and reduced cost of conventional visual inspection procedures;
- -
- accelerated and/or facilitated visual checks in hard-to-reach areas, increased operator safety;
- -
- possibility of designing specific and reproduceable inspection paths around the aircraft, capturing images at a safe distance from the structures and at different viewpoints, and transmitting data via dedicated links to a ground station;
- -
- accurate defect assessment by comparing acquired images with 3D structural models of the airplane;
- -
- ease of use, no pilot qualification needed;
- -
- possibility of gathering different information by installing on the UAV cost-effective sensors (thermal cameras, non-destructive testing sensors, etc.);
- -
- increased quality of inspection reports, real-time identification of maintenance issues, damage and anomalies comparison with previous inspections;
- -
- possibility of producing automatic inspection reports and performing accurate inspections after every flight.
2. Background
3. UAV and GVI Equipment
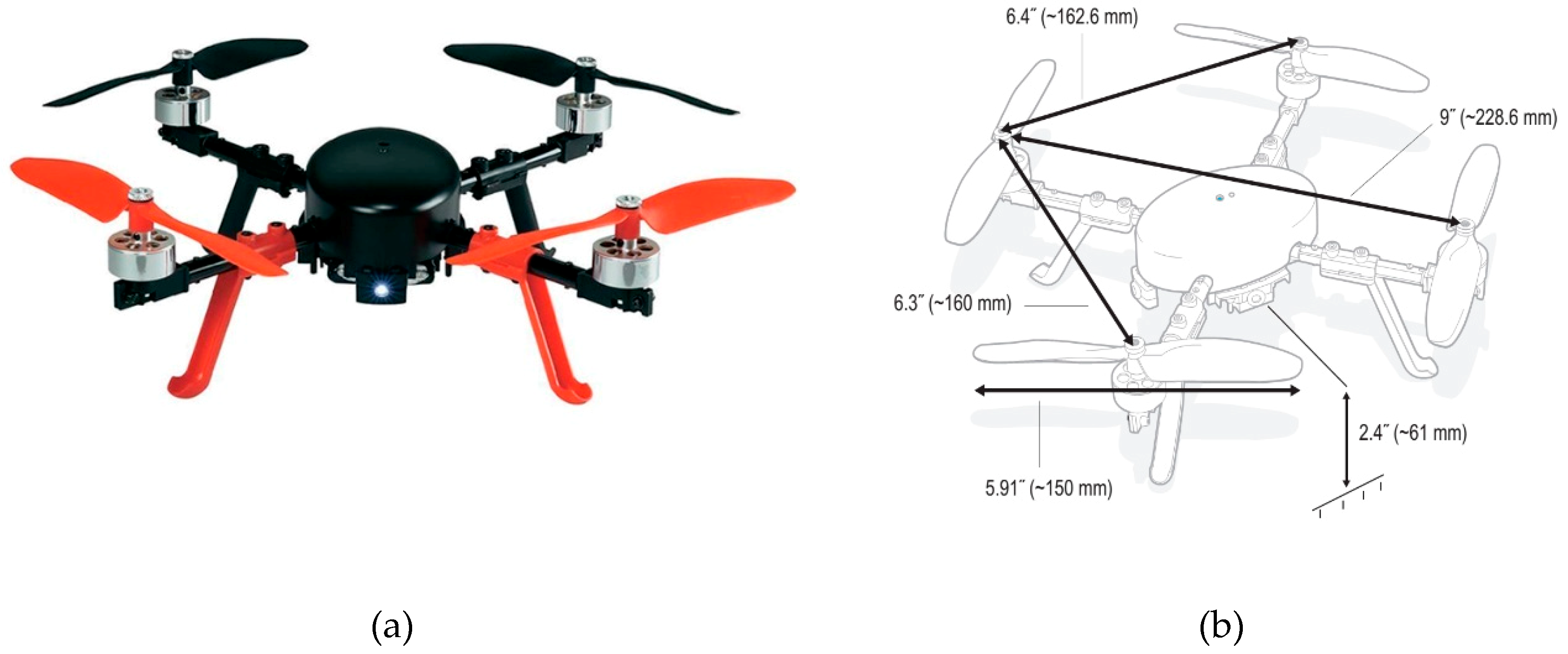
3.1. Unmanned Aerial Vehicle
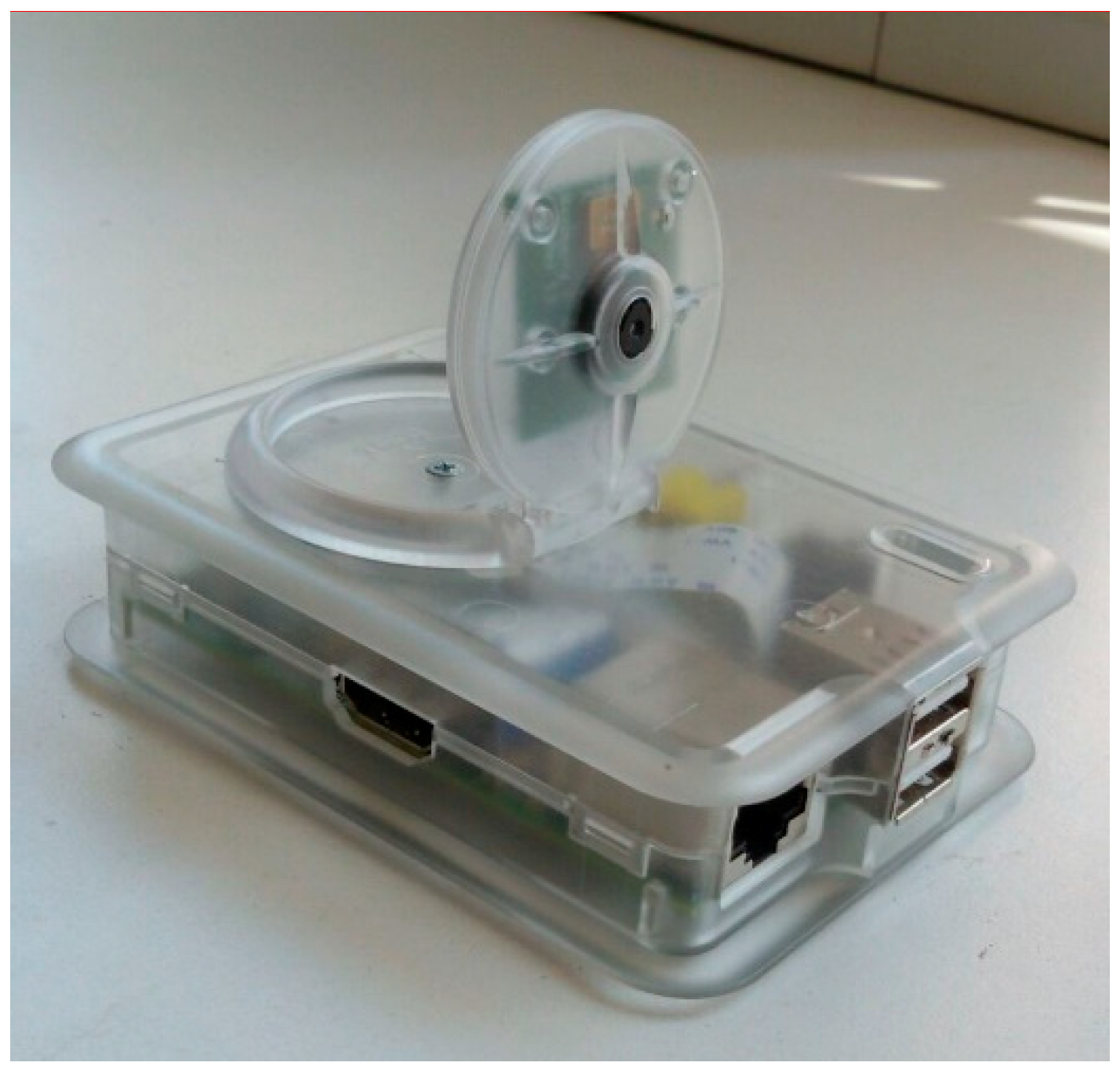
3.2. GVI and Image Processing Equipment
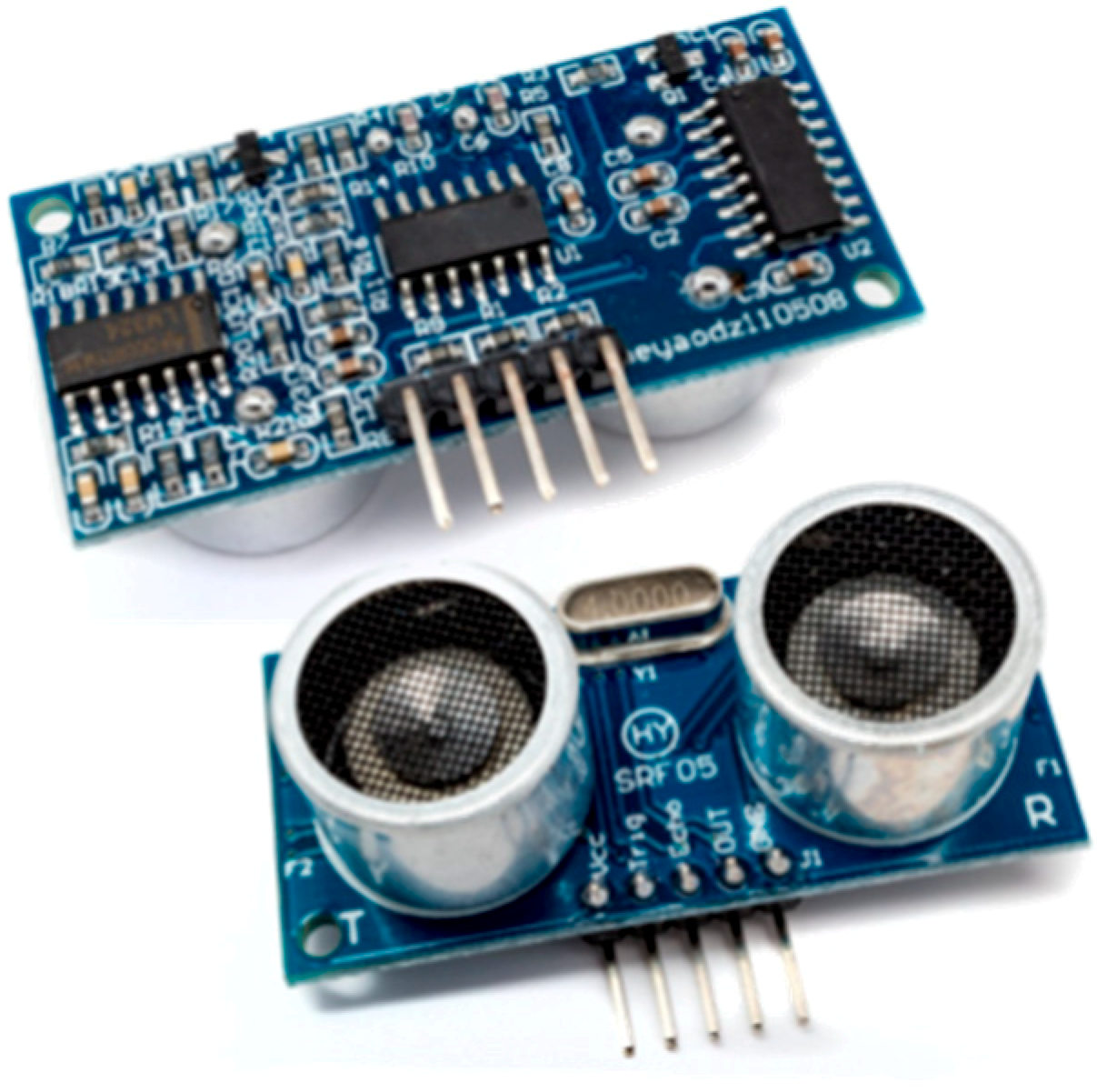
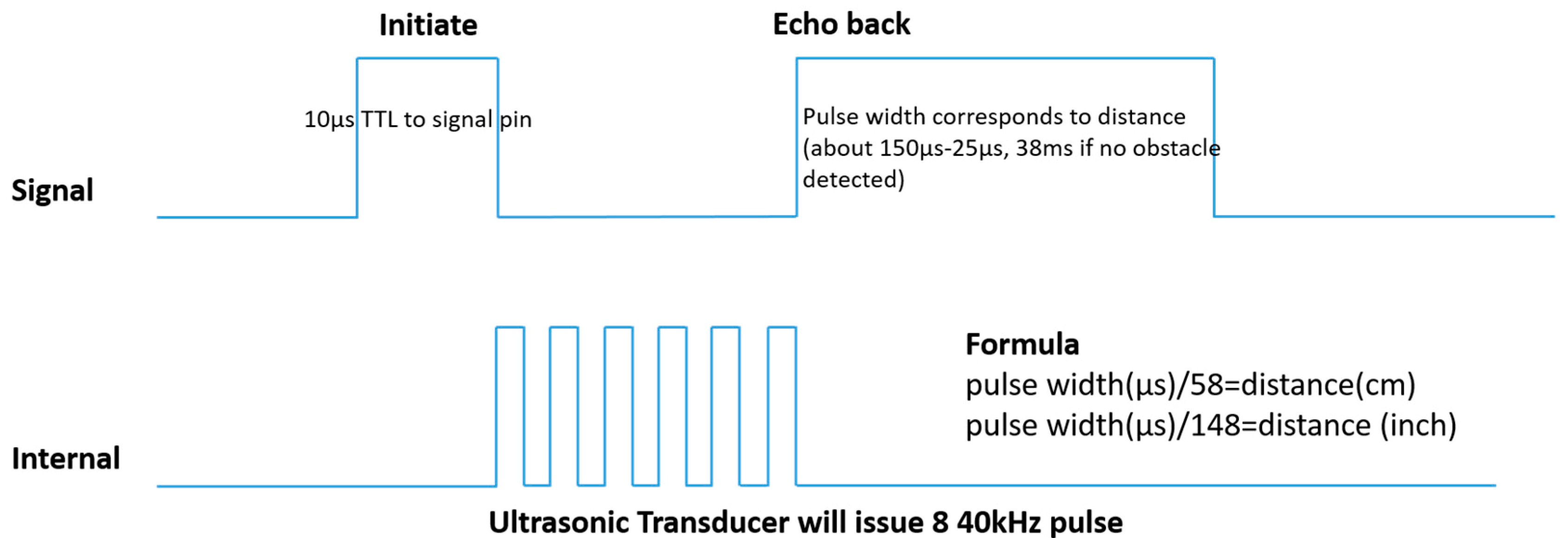
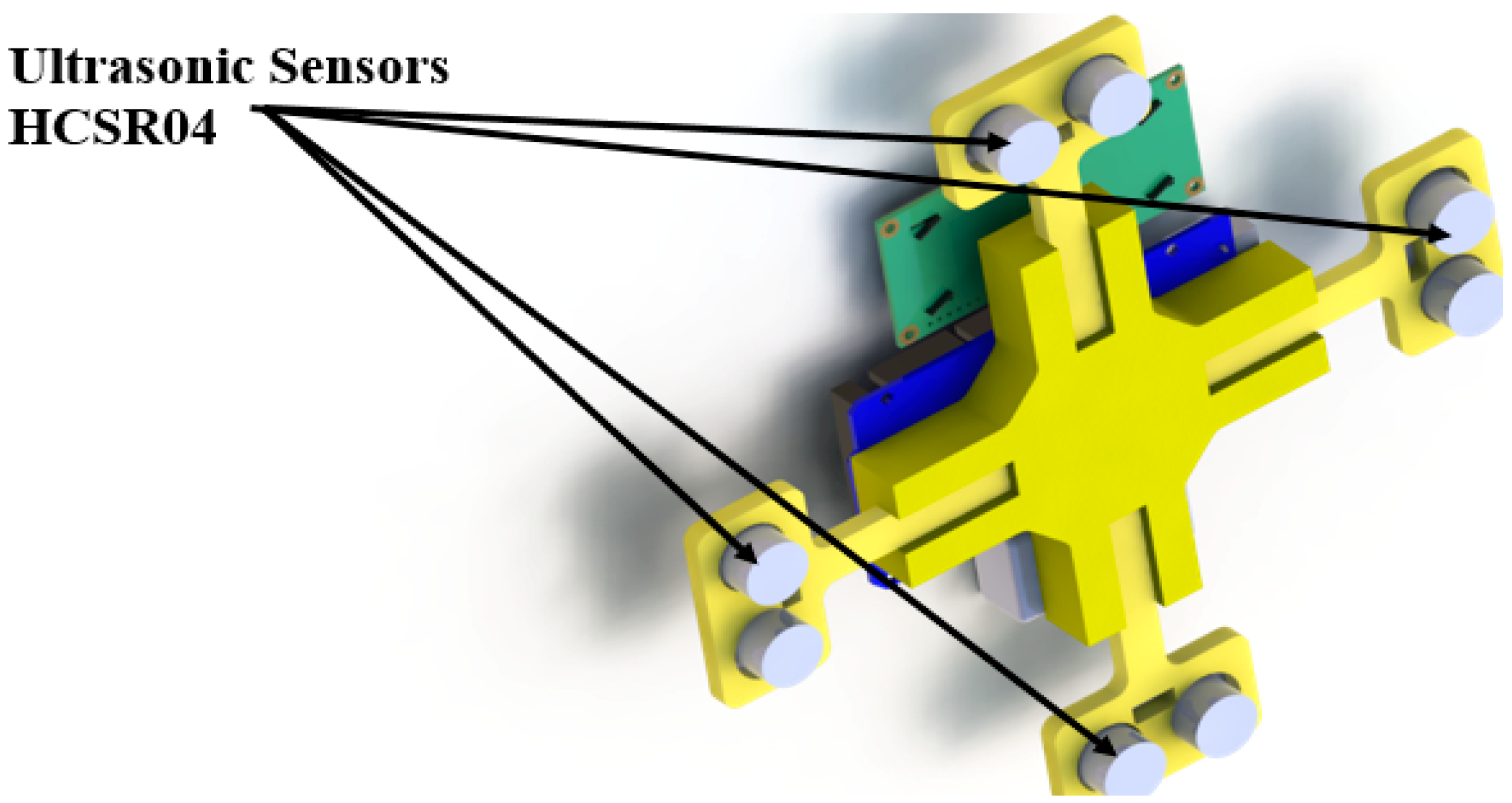
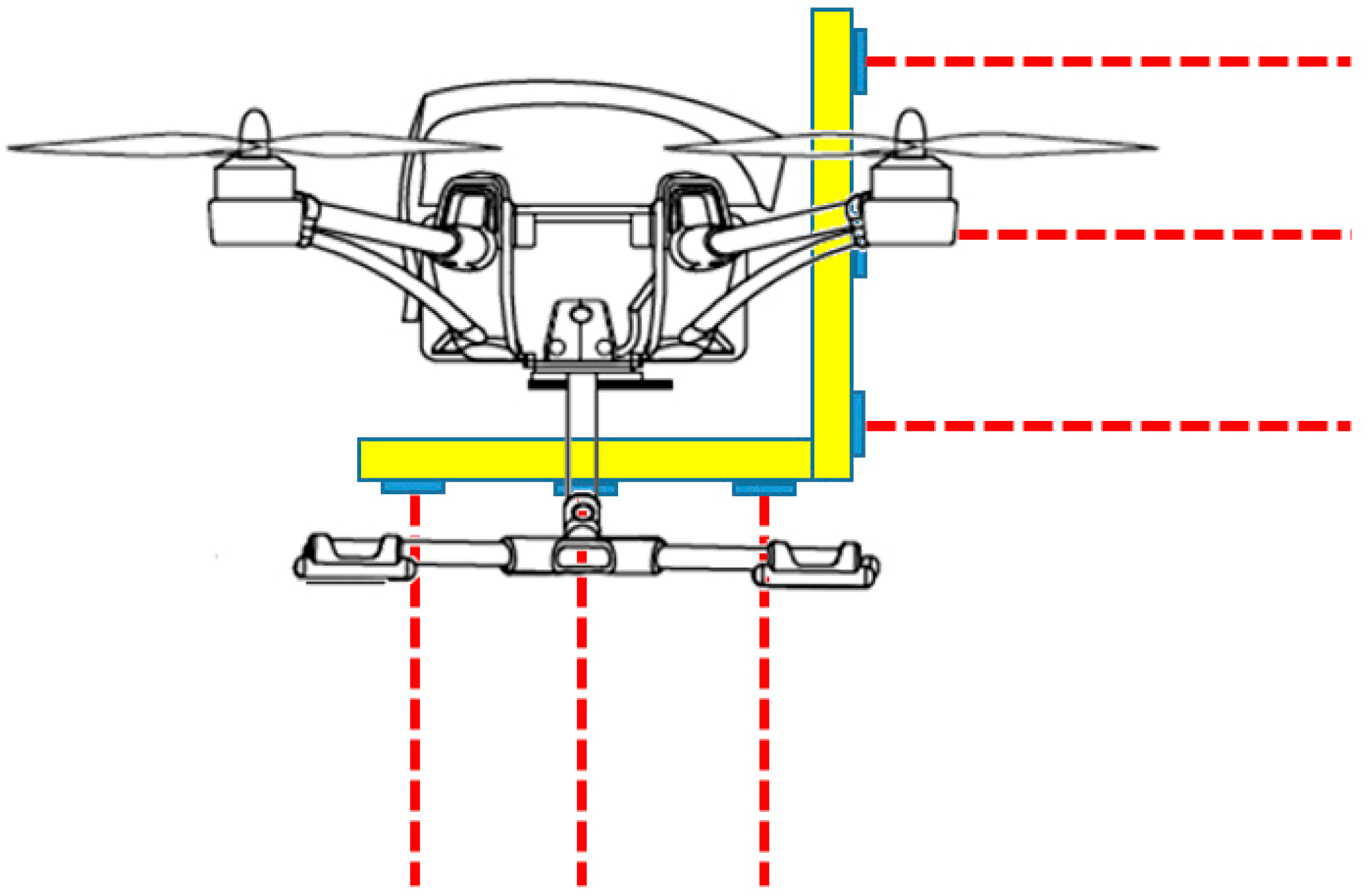
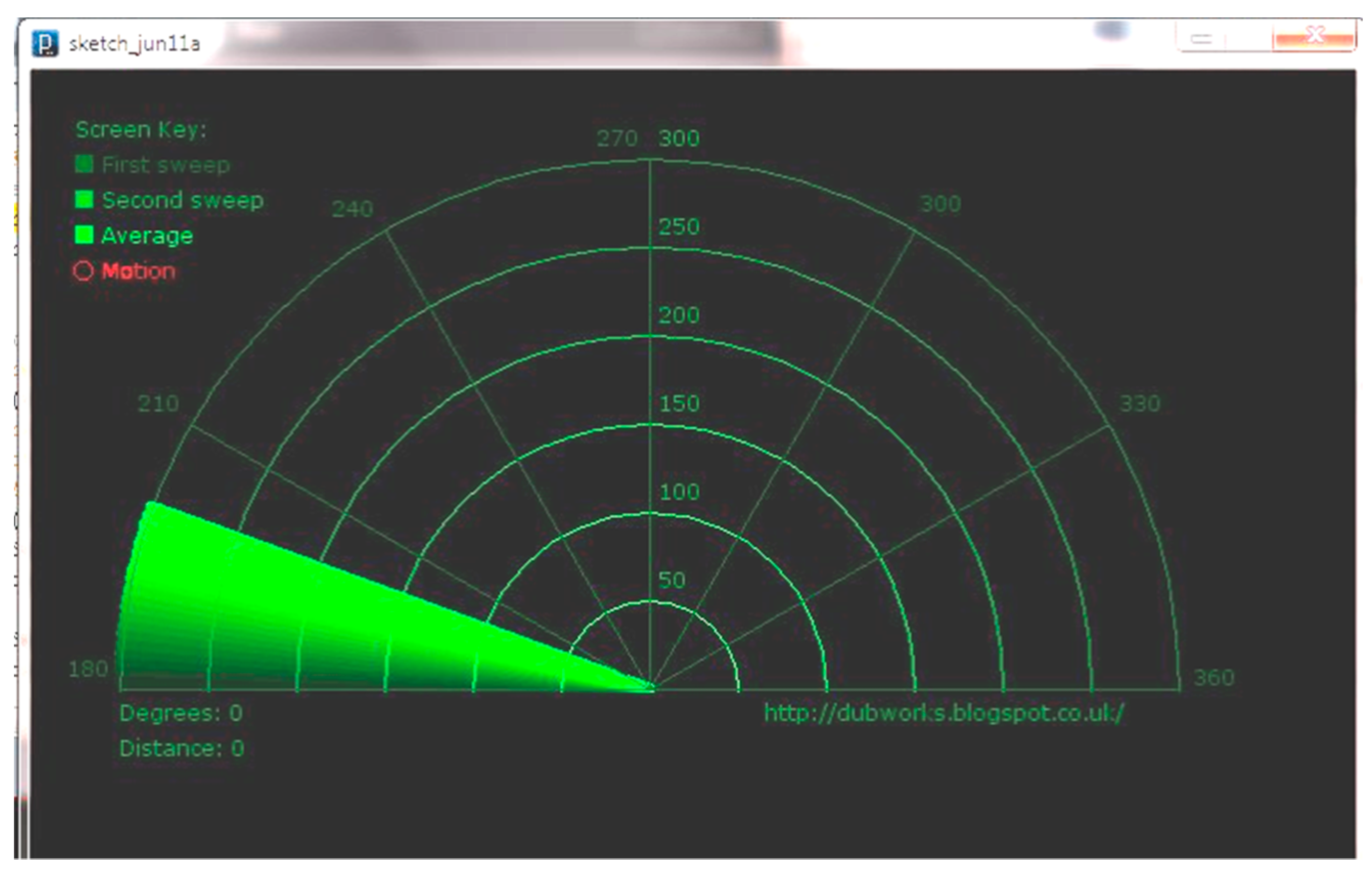
3.3. Ultrasonic Distance Keeper System (UDKS) and Data Filtering
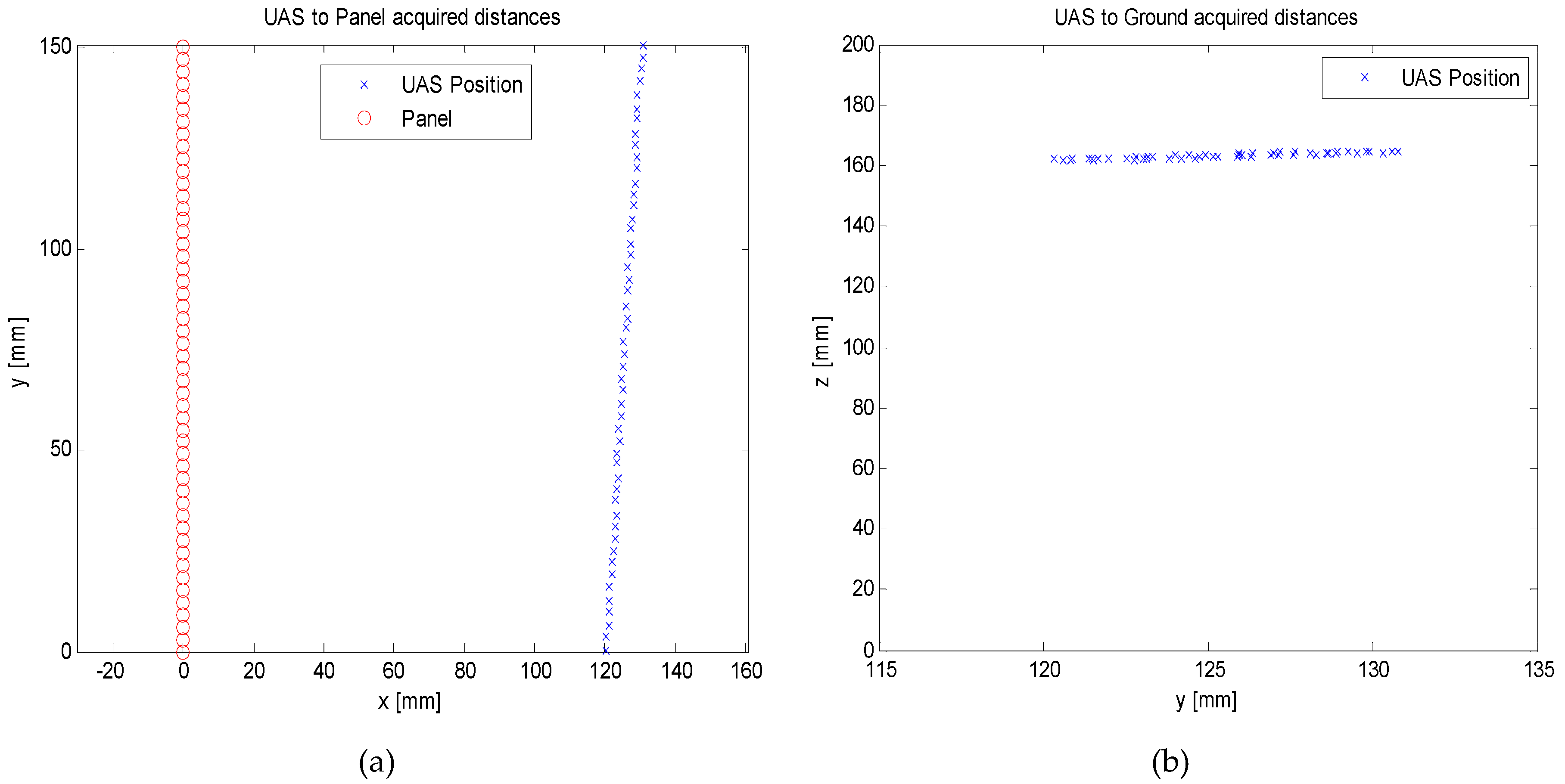
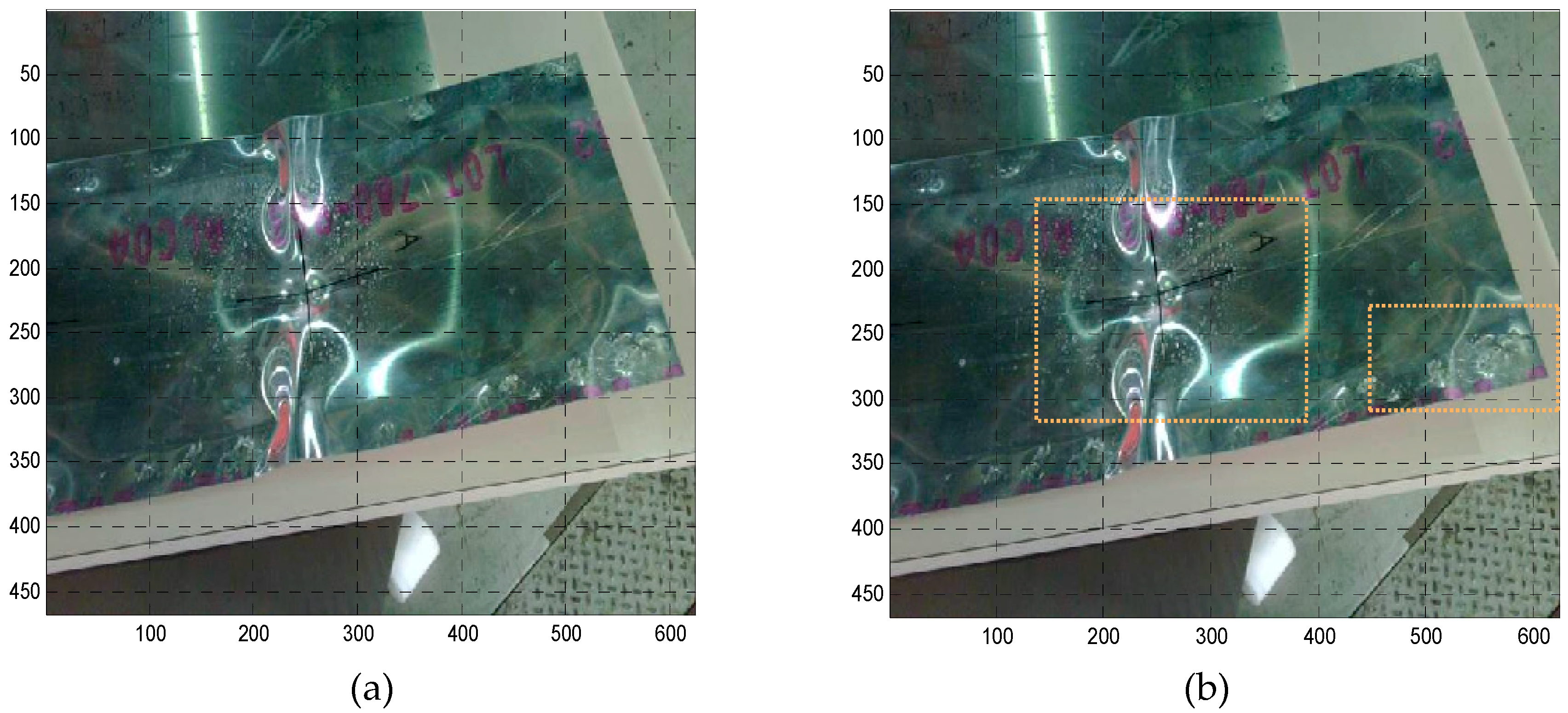
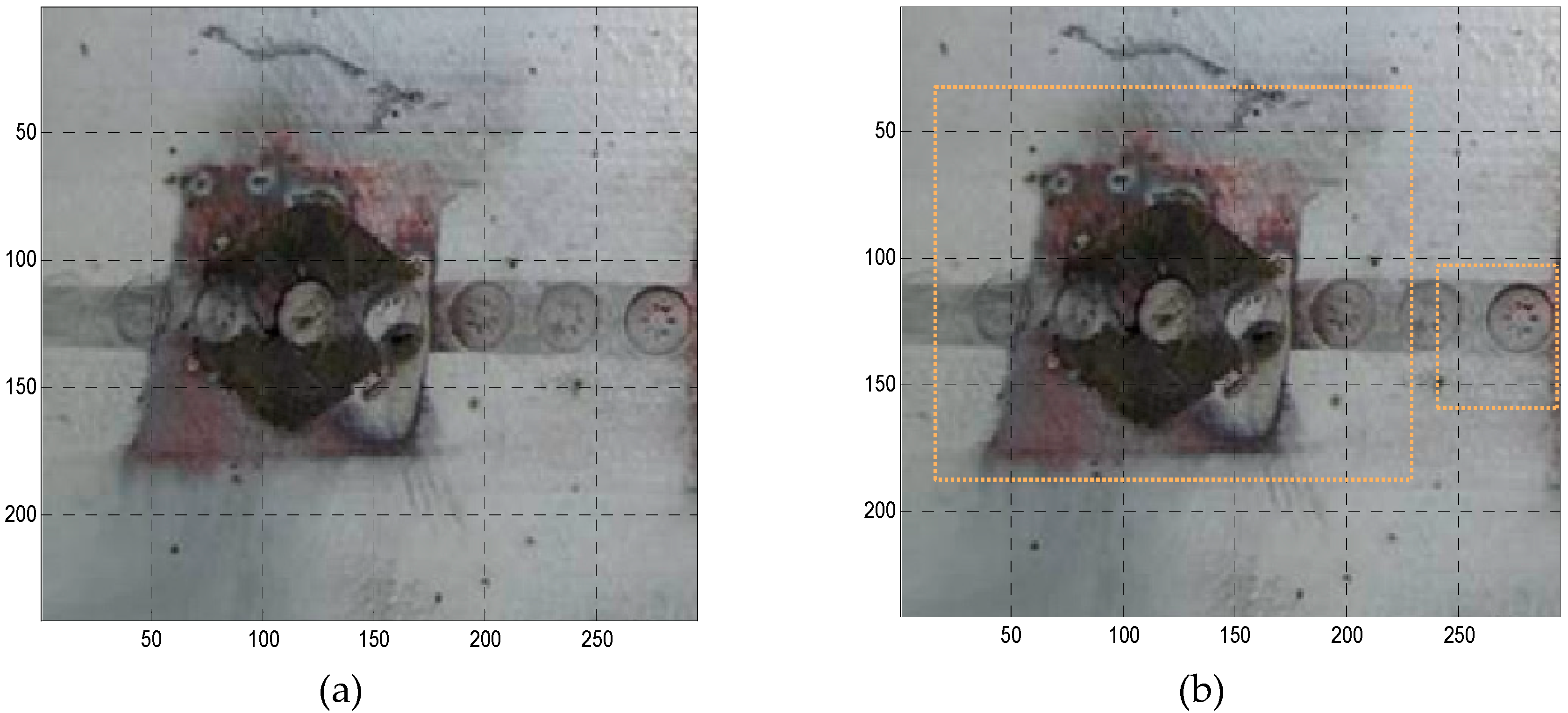
4. Experimental Results
5. Conclusions and Further Work
- -
- MAV (quadrotor);
- -
- Microprocessor and embedded HD camera (Raspberry);
- -
- Open-source image processing libraries;
- -
- Wi-Fi link for data transmission to a PC-based ground station;
- -
- SR sensors for distance measurements;
- -
- Microcontroller (Arduino) and IDE;
- -
- Matlab/LabVIEW for post-processing and data presentation.
Author Contributions
Funding
Conflicts of Interest
References
- Air Transport Association of America Inc. ATA MSG-3, Operator/Manufacturer Scheduled Maintenance Development, Vol. 1- Fixed Wing Aircraft; ATA: Washington, DC, USA, 2015. [Google Scholar]
- Intergraph Corp. Maintenance Steering Group-3 (MSG-3)-Based Maintenance and Performance-Based Planning and Logistic (PBP&L) Programs—A White Paper; Intergraph Corporation: Madison, AL, USA, 2006. [Google Scholar]
- US Department of Transportation—FAA. Visual Inspection for Aircraft; Advisory Circular (AC) No. 43-204; Federal Aviation Administration: Washington, DC, USA, 1997.
- Airbus. Innovation Takes Aircraft Visual Inspection to New Heights. 2018. Available online: https://www.airbus.com/newsroom/news/en/2018/04/innovation-takes-aircraft-visual-inspections-to-new-heights.html (accessed on 13 October 2018).
- Office of the Secretary of Defense. Unmanned Aircraft Systems Roadmap: 2005–2030; Office of the Secretary of Defense: Washington, DC, USA, 2005.
- Morgenthal, G.; Hallermann, N. Quality Assessment of Unmanned Aerial Vehicle (UAV) Based Inspection of Structures. Adv. Struct. Eng. 2014, 17, 289–302. [Google Scholar] [CrossRef]
- Marinho, C.A.; de Souza, C.; Motomura, T.; Gonçalves da Silva, A. In-Service Flares Inspection by Unmanned Aerial Vehicles (UAVs). In Proceedings of the 18th World Conference on Nondestructive Testing, Durban, Africa, 16–20 April 2012. [Google Scholar]
- Sadovnychiy, S. Unmanned Aerial Vehicle System for Pipeline Inspection. In Proceedings of the 8th WSEAS International Conference on Systems, Athens, Greece, 12–14 July 2004. [Google Scholar]
- Tatum, M.C.; Liu, J. Unmanned Aerial Vehicles in the Construction Indstry. In Proceedings of the 53rd ASC Annual International Conference, Seattle, WA, USA, 5–8 April 2017; pp. 383–393. [Google Scholar]
- Metni, N.; Hamel, T. A UAV for bridge inspection: Visual servoing control law with orientation limits. Autom. Constr. 2007, 17, 3–10. [Google Scholar] [CrossRef]
- Eschmann, C.; Kuo, C.-M.; Kuo, C.-H.; Boller, C. Unmanned Aircraft Systems for Remote Building Inspection and Monitoring. In Proceedings of the 6th European Workshop on Structural Health Monitoring (EWSHM 2012), Dresden, Germany, 3–6 July 2012. [Google Scholar]
- Zhang, C. An UAV-based photogrammetric mapping system for road condition assessment. Remote. Sens. Spat. Inf. Sci. 2008, 37, 627–632. [Google Scholar]
- Leonardi, G.; Barrile, V.; Palamara, R.; Suraci, F.; Candela, G. 3D Mapping of Pavement Distresses Using an Unmanned Aerial Vehicle (UAV) System; Springer: Berlin, Germany, 2018; Volume 101, pp. 164–171. [Google Scholar]
- Montambault, S.; Beaudry, J.; Touissant, K.; Pouliot, N. On the application of VTOL UAVs to the inspection of Power Utility Assets. In Proceedings of the 1st International Conference on Applied Robotics for the Power Industry (CARPI 2010), Montreal, QC, Canada, 5–7 October 2010; pp. 1–7. [Google Scholar]
- Deng, C.; Wang, S.; Huang, Z.; Tam, Z.; Liu, J. Unmanned Aerial Vehicles for Power Line Inspection: A Cooperative Way in Platforms and Communications. J. Commun. 2014, 9, 687–692. [Google Scholar] [CrossRef]
- Bellezza Quarter, P.; Grimaccia, F.; Leva, S.; Mussetta, M.; Aghaei, M. Light Unmanned Aerial Vehicles (UAVs) for Cooperative Inspection of PV Plants. IEEE J. Photovolt. 2014, 4, 1107–1113. [Google Scholar] [Green Version]
- Kim, H.; Sim, S.H.; Cho, S. Unmanned Aerial Vehicle (UAV)-powered Concrete Crack Detection based on Digital Image Processing. In Proceedings of the 6th International Conference on Advances in Experimental Structural Engineering, Urbana-Champaign, IL, USA, 1–2 August 2015. [Google Scholar]
- Rodrigues Santos de Melo, R.; Bastos Costa, D.; Sampaio Alvares, J.; Irizarri, J. Applicability of unmanned aerial system (UAS) for safety inspection on construction sites. Safety Sci. 2015, 98, 174–185. [Google Scholar] [CrossRef]
- Kit, H.T.; Chen, H. Autonomous Elevator Inspection with Unmanned Aerial Vehicle. In Proceedings of the 3rd Asia-Pacific World Congress on Computer Science and Engineering (APWC on CSE), Nadi, Fiji, 5–6 December 2016. [Google Scholar]
- Ellenberg, A.; Branco, L.; Krick, A.; Baroli, I.; Kontsos, A. Use of Unmanned Aerial Vehicle for Quantitative Infrastructure Evaluation. J. Infrastruct. Syst. 2014, 21. [Google Scholar] [CrossRef]
- Blumenthal, S.; Holz, D.; Linder, T.; Molitor, P.; Surmann, H.; Tretyakov, V. Teleoperated Visual Inspection and Surveillance with Unmanned Ground and Aerial Vehicles. In Proceedings of the REV2008—Remote Engineering & Virtual Instrumentation, Düsseldorf, Germany, 23–25 June 2008. [Google Scholar]
- See, J.E. Visual Inspection: A Review of the Literature; SANDIA Report SAND2012-8590; Sandia National Laboratories: Albuquerque, NM, USA, 2012; p. 77.
- Eisenbeiss, H. A Mini Unmanned Aerial Vehicle (UAV): System Overview and Image Acquisition. Remote Sens. Spat. Inf. Sci. 2004, 36.5/W1, 1–7. [Google Scholar]
- Dalamagkidis, K. Classification of UAVs. In Handbook of Unmanned Aerial Vehicles; Springer Science+Business Media: Dordrecht, The Netherlands, 2015; pp. 83–91. [Google Scholar]
- Valavanis, K.P. Introduction. In Advances in Unmanned Aerial Vehicles. State of the Art and the Road to Autonomy; Springer: Dordrecht, The Netherlands, 2007; pp. 3–13. [Google Scholar]
- Bouabdallah, S.; Siegwart, R. Design and Control of a Miniature Quadrotor. In Advances in Unmanned Aerial Vehicles. State of the Art and the Road to Autonomy; Valavanis, Springer: Dordrecht, The Netherlands, 2007; pp. 171–210. [Google Scholar]
- Schmidt, M.D. Simulation and Control od a Quadrotor Unmanned Aerial Vehicle. Ph.D. Thesis, College of Engineering, University of Kentucky, Lexington, Kentucky, 2011. [Google Scholar]
- Nonami, K. Autonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial Vehicles; Springer: Heidelberg, Germany, 2010. [Google Scholar]
- Dief, T.N.; Yoshida, S. Review: Modeling and Classical Controller of Quad-rotor. IRACST Int. J. Comput. Sci. Inf. Tecnol. Secur. 2015, 5, 314–319. [Google Scholar]
- Hoffmann, G.; Huang, H.; Waslander, S.L.; Tomlin, C.J. Quadrtor Helicopter Flight Dynamics and Control: Theory and Experiment. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, AIAA 2007-6461, Hilton Head, CA, USA, 20–23 August 2007. [Google Scholar]
- CEI (Conrad Electronic International). RC Logger® EYE One Xtreme—Operating Instructions (88008RC—Mode 2); CEI Ltd.: Hong Kong, China, 2015; p. 60. [Google Scholar]
- Raspberry Pi Foundation. Raspberry Pi Camera Module v2. Hardware Specification. 2015. Available online: https://www.raspberrypi.org/documentation/hardware/camera/ (accessed on 13 October 2018).
- Raspberry Pi Foundation. Raspberry Pi 2 Model B Specifications. 2015. Available online: https://www.raspberrypi.org/products/raspberry-pi-2-model-b/ (accessed on 13 October 2018).
- Brown, D.C. Close-range camera calibration. Photogramm. Eng. 1971, 37, 855–866. [Google Scholar]
- Del Pizzo, S.; Papa, U.; Gaglione, S.; Troisi, S.; Del Core, G. A Vision-based navigation system for landing procedure. Acta IMEKO 2018, 7, 102–109. [Google Scholar] [CrossRef]
- Hough, P.V.C. Method and Means for Recognizing Complex Patterns. US Patent Office No. US 3069654, 18 December 1962. [Google Scholar]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 6, 679–698. [Google Scholar] [CrossRef]
- Luhman, T.; Robson, S.; Kyle, S.; Harley, I. Close Range Photogrammetry: Principles, Techniques and Applications; Whittles Publishing/John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006. [Google Scholar]
- Cytron Technologies. HC-SR04 Ultrasonic Sensor—Product User’s Manual, V 1.0; Cytron Technologies Sdn. Bhd.: Penang, Malaysia, 2013. [Google Scholar]
- Adafruit Industries. Adafruit Learning System—DHT11, DHT12 and AM2302 Sensors. Available online: https://cdn-learn.adafruit.com/downloads/pdf/dht.pdf?timestamp=1543644105 (accessed on 13 October 2018).
- Papa, U.; Picariello, F.; Del Core, G. Atmosphere Effect on Sonar Sensor System. Aerosp. Electron. Syst. Mag. 2016, 31, 34–40. [Google Scholar] [CrossRef]
- Papa, U.; Del Core, G. Design of Sonar Sensor Model for Safe Landing of an UAV. In Proceedings of the 2nd IEEE Workshop on Metrology for Aerospace, Benevento, Italy, 3–5 June 2015; pp. 361–365. [Google Scholar]
- Papa, U.; Ponte, S.; Del Core, G.; Giordano, G. Obstacle Detection and Ranging Sensor Integration for a Small Unmanned Aircraft System. In Proceedings of the 4th International Workshop on Metrology for Aerospace (MetroAeroSpace), Padova, Italy, 21–23 June 2017. [Google Scholar]
- Hamel, T.; Mahony, R. Visual servoing of under-actuated dynamic rigid body system: An image space approach. IEEE Trans. Robot. Autom. 2002, 18, 187–198. [Google Scholar] [CrossRef]
- DiLaura, D.L.; Houser, K.W.; Mistrick, R.G.; Stelly, G.R. The Lighting Handbook, 10th ed.; Illuminating Engineering Society (IES): New York, NY, USA, 2011. [Google Scholar]
- Almadhound, R.; Taha, T.; Seneviratne, L.; Dias, J.; Cai, G. Aircraft Inspection Using Unmanned Aerial Vehicles. In Proceedings of the International Micro Air Vehicle Conference and Competition 2016 (IMAV 2016), Beijng, China, 17–21 October 2016. [Google Scholar]
- Bry, A.; Roy, N. Rapidly-exploring Random Belief Trees for Motion Planning Under Uncertainty. In Proceedings of the IEEE Intenational Conference on Robotics and Automation (ICRA 2011), Shangai, China, 9–13 May 2011. [Google Scholar]
- Griffiths, S.; Saunders, J.; Curtis, A.; Barber, B.; McLain, T.; Beard, R. Obstacle and Terrain Avoidance for Miniature Aerial Vehicles. In Advances in Unmanned Aerial Vehicles. State of the Art and the Road to Autonomy; Springer: Dordrecht, The Netherlands, 2007; pp. 213–244. [Google Scholar]
- Papa, U. Embedded Platforms for UAS Landing Path and Obstacle Detection; Book Series of Studies in Systems, Decision and Control; Springer International Publishing: Dordrecht, The Netherlands, 2018; Volume 136. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass (kg) | Range (km) | Altitude (m) | Endurance (h) | |
|---|---|---|---|---|
| Micro UAV (MAV) | <5 | <10 | Up to 250 | ≤1 |
| Mini UAV | <20 or 25 | <10 | Up to 300 | <2 |
| Low Altitude, Long Endurance (LALE) | 15–25 | >500 | 3000 | >24 |
| Low Altitude, Deep Penetration (LADP) | 250–2500 | >250 | 50–9000 | 0.5–1 |
| Medium Altitude, Long Endurance (MALE) | 1000–1500 | >500 | 3000 | 24–48 |
| High Altitude, Long Endurance (HALE) | 2500–5000 | >2000 | 20000 | 24–48 |
| Tactical UAV (TUAV), Close Range (CR) | 25–150 | 10–30 | 3000 | 2–4 |
| TUAV, Medium Range (MR) | 150–500 | >500 | 8000 | 10–18 |
| Features | Properties |
|---|---|
| Size, weight | 25 × 24 × 9 mm, 3 g |
| Still resolution | 8 Megapixels |
| Video modes | 1080p30, 720p60 and 640 × 480p60/90 |
| Sensor resolution | 3280 × 2464 pixel (Sony IMX219) |
| Focal length | 3.04 mm |
| Pixel size | 1.12 × 1.12 μm |
| Sensor size | Width: 6.004 ± 0.006 mm Height: 3.375 ± 0.005 mm |
| Fixed focus | 1m to infinity |
| Frame rate | max 90 fps |
| Horizontal/Vertical FOV (Field Of View) | 62.2/48.8 degrees |
| HC-SR04 | |
|---|---|
| Supply Voltage | +5 V DC |
| Working Current | 15 mA |
| Ranging distance | 2–400 cm |
| Range resolution | 0.3 cm |
| Input Trigger | 10-μs TTL pulse |
| Echo pulse | Pos. TTL pulse |
| Burst Frequency | 40 kHz |
| Measuring Angle | 30 degrees |
| Weight | 20 g |
| Dimensions | 45 × 20 × 15 mm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papa, U.; Ponte, S. Preliminary Design of an Unmanned Aircraft System for Aircraft General Visual Inspection. Electronics 2018, 7, 435. https://doi.org/10.3390/electronics7120435
Papa U, Ponte S. Preliminary Design of an Unmanned Aircraft System for Aircraft General Visual Inspection. Electronics. 2018; 7(12):435. https://doi.org/10.3390/electronics7120435
Chicago/Turabian StylePapa, Umberto, and Salvatore Ponte. 2018. "Preliminary Design of an Unmanned Aircraft System for Aircraft General Visual Inspection" Electronics 7, no. 12: 435. https://doi.org/10.3390/electronics7120435
APA StylePapa, U., & Ponte, S. (2018). Preliminary Design of an Unmanned Aircraft System for Aircraft General Visual Inspection. Electronics, 7(12), 435. https://doi.org/10.3390/electronics7120435