
Nonlinear Robust Control of a New Reconfigurable Unmanned Aerial Vehicle


Abstract
:1. Introduction
1.1. Definition
1.2. Related Works
1.3. Structure of the Paper
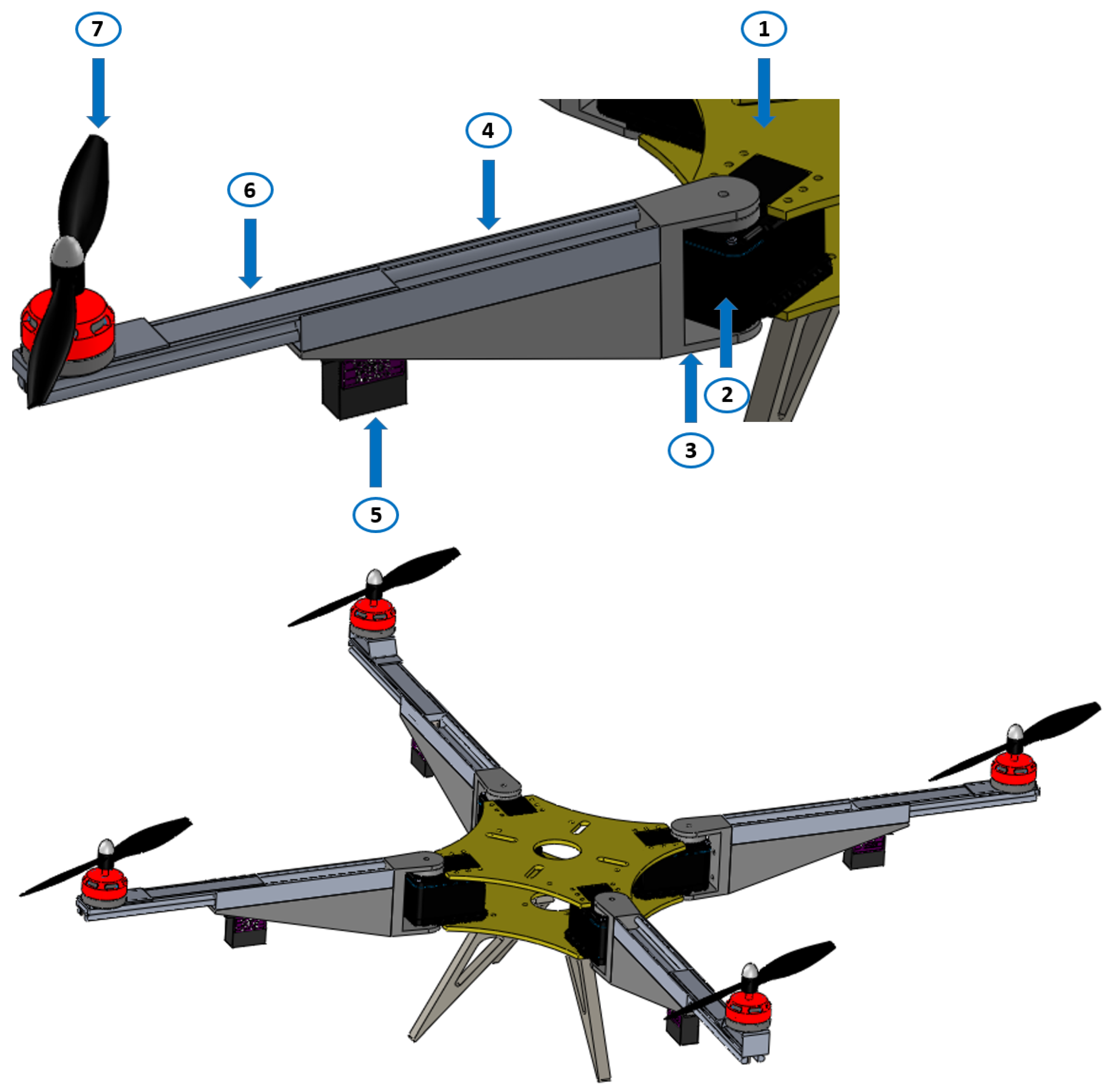
2. Drone Design and Modeling
2.1. Drone Design
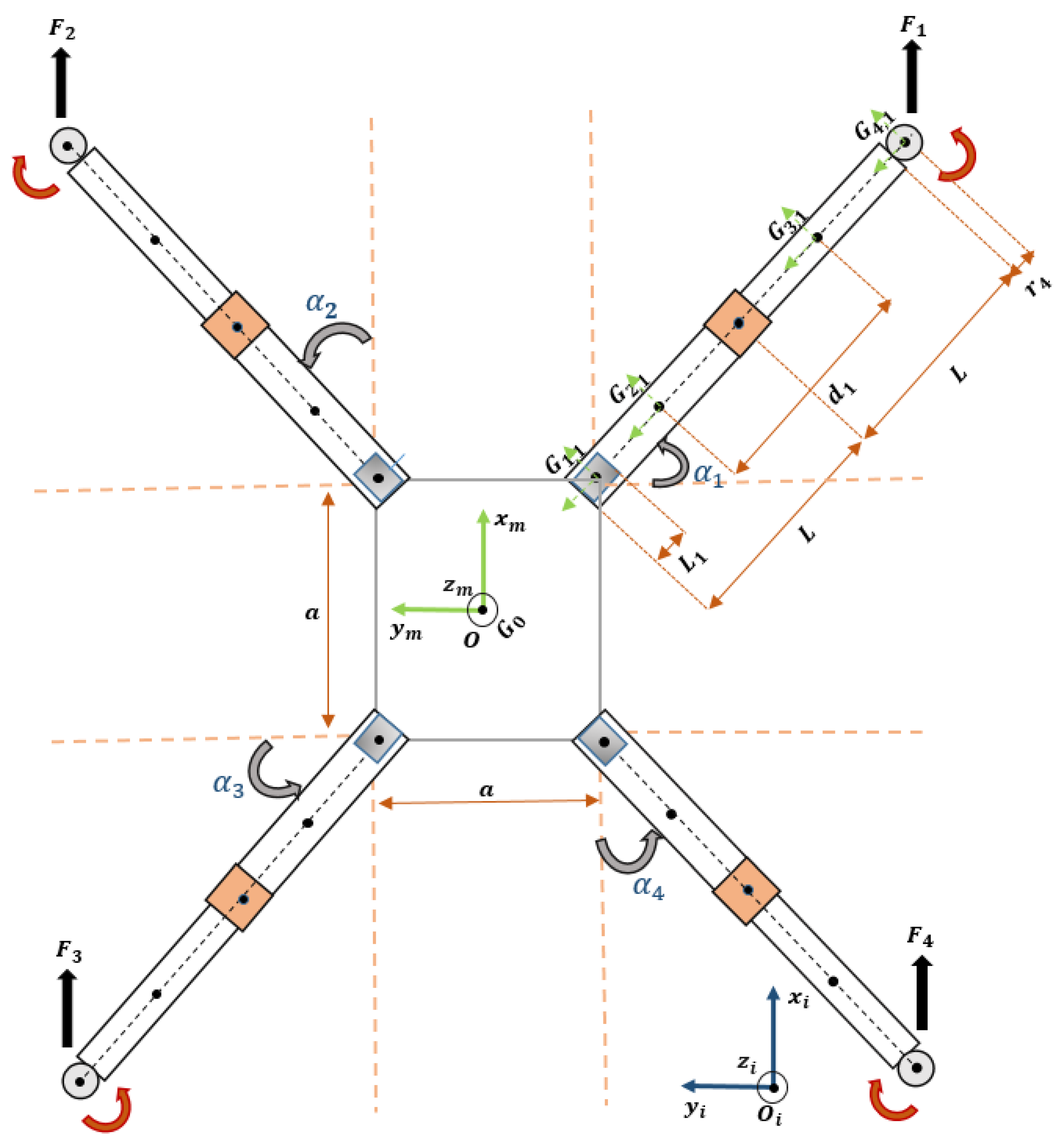
2.2. Drone Modeling
2.3. Control Matrix
3. Drone Control
3.1. Control Architecture
3.2. Fast Terminal Sliding Mode Control (FTSMC) Design
3.3. Optimization
4. Simulation Results
4.1. Flight Scenario
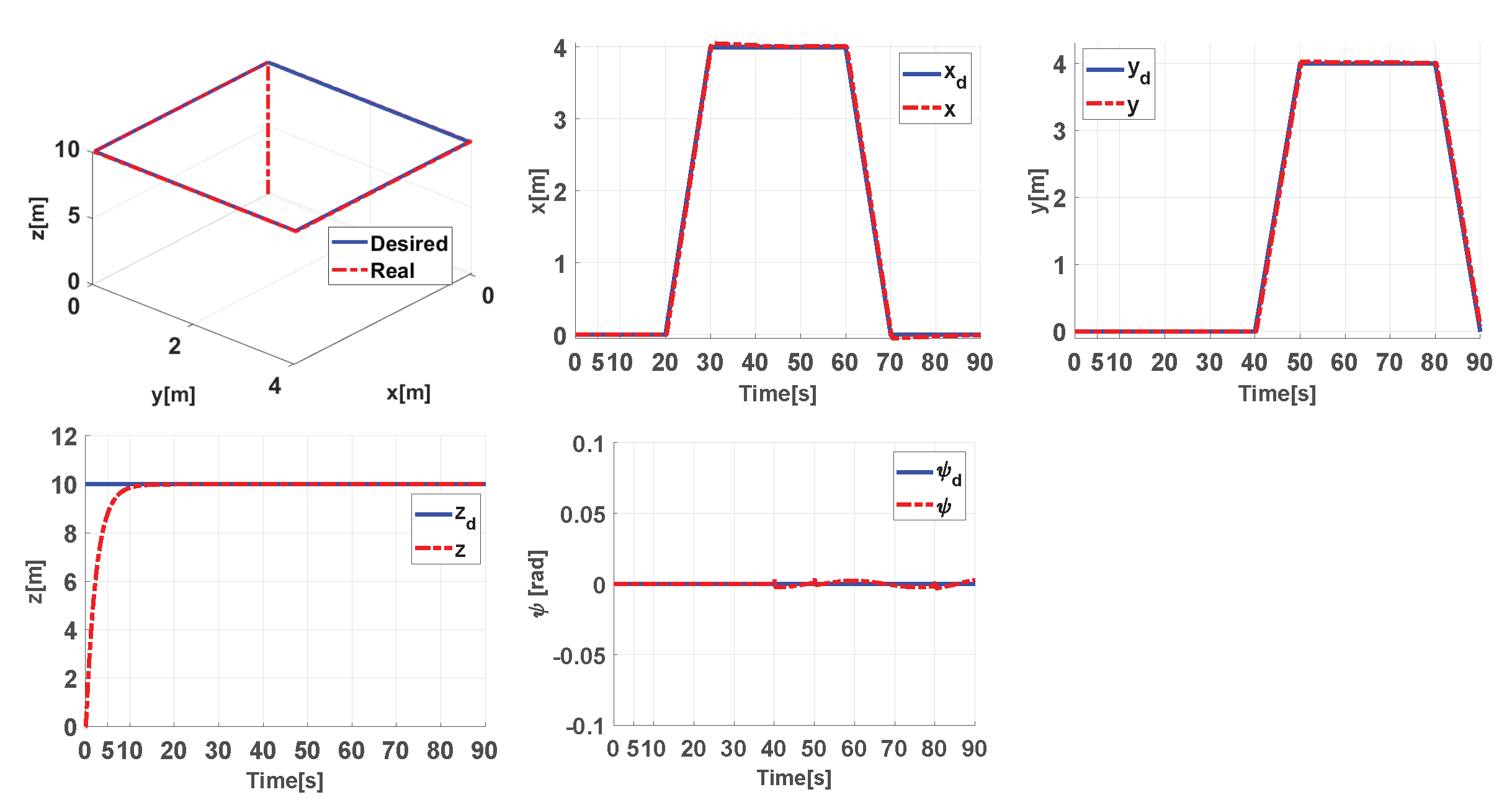
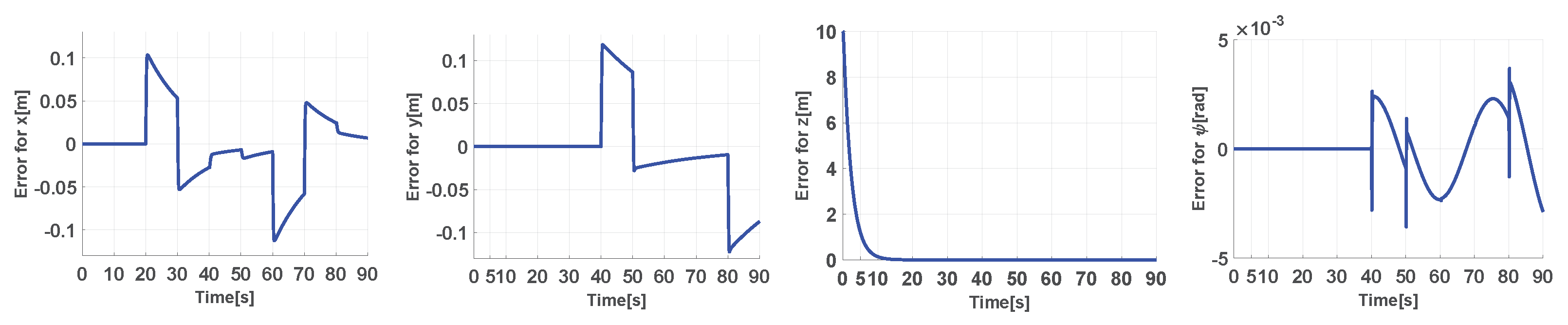
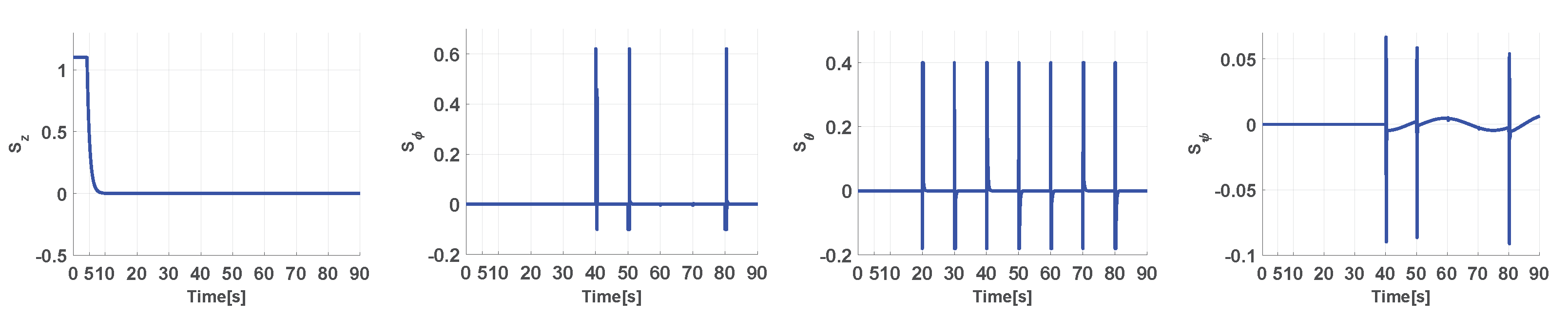
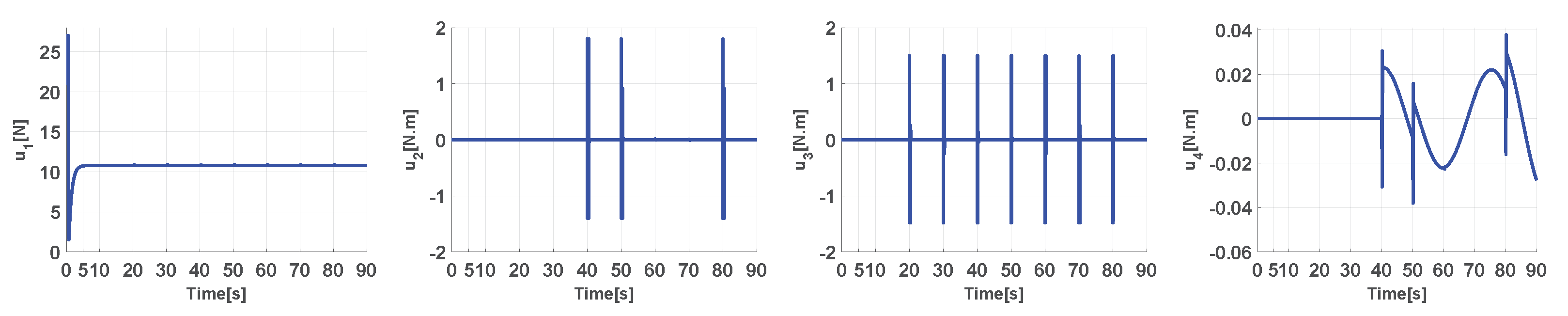
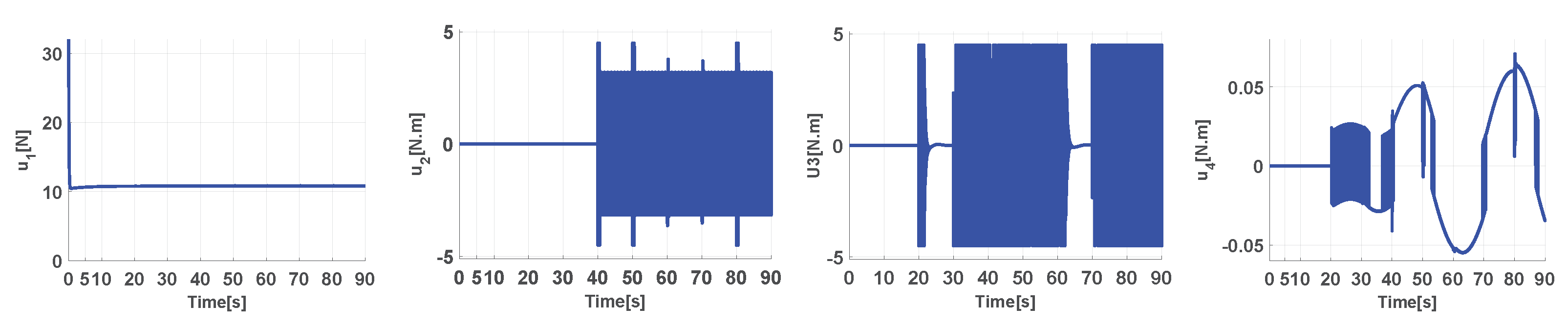
4.2. Simulations
4.3. Results Interpretation
5. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- da Ferreira, M.A.; Begazo, M.F.T.; Lopes, G.C.; de Oliveira, A.F.; Colombini, E.L.; da Simões, A. Drone reconfigurable architecture (dra): A multipurpose modular architecture for Unmanned Aerial Vehicles (UAVs). J. Intell. Robot. Syst. 2020, 99, 517–534. [Google Scholar] [CrossRef]
- da Ferreira, M.A.; Lopes, G.C.; Colombini, E.L.; da Simões, A. A novel architecture for multipurpose reconfigurable unmanned aerial vehicle (uav): Concept, design and prototype manufacturing. In Proceedings of the 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE), João Pessoa, Brazil, 6–10 November 2018; pp. 443–450. [Google Scholar]
- Junaid, A.B.; da Sanchez, A.D.; Bosch, J.B.; Vitzilaios, N.; Zweiri, Y. Design and implementation of a dualaxis tilting quadcopter. Robotics 2018, 7, 65. [Google Scholar] [CrossRef] [Green Version]
- Barbarino, S.; Bilgen, O.; Ajaj, R.M.; Friswell, M.I.; Inman, D.J. A review of morphing aircraft. J. Intell. Mater. Syst. Struct. 2011, 22, 823–877. [Google Scholar] [CrossRef]
- Derrouaoui, S.H.; Bouzid, Y.; Guiatni, M.; Dib, I. A Comprehensive Review on Reconfigurable Drones: Classification, Characteristics, Design and Control Technologies. Unmanned Syst. 2021, 9, 1–27. [Google Scholar]
- Fasel, U.; Keidel, D.; Baumann, L.; Cavolina, G.; Eichenhofer, M.; Ermanni, P. Composite additive manufacturing of morphing aerospace structures. Manuf. Lett. 2020, 23, 85–88. [Google Scholar] [CrossRef]
- Choi, H.C.; Wee, I.; Corah, M.; Sabet, S.; Kim, T.; Touma, T.; Shim, D.H.; Agha-mohammadi, A.-A. Baxter: Bi-modal aerial-terrestrial hybrid vehicle for long-endurance versatile mobility: Preprint version. arXiv 2021, arXiv:2102.02942. [Google Scholar]
- Brown, L.; Clarke, R.; Akbari, A.; Bhandari, U.; Bernardini, S.; Chhabra, P.; Marjanovic, O.; Richardson, T.; Watson, S. The design of prometheus: A reconfigurable uav for subterranean mine inspection. Robotics 2020, 9, 95. [Google Scholar] [CrossRef]
- Papadimitriou, A.; Mansouri, S.S.; Kanellakis, C.; Nikolakopoulos, G. Geometry aware nmpc scheme for morphing quadrotor navigation in restricted entrances. arXiv 2021, arXiv:2101.02965. [Google Scholar]
- Wallace, D.A. Dynamics and Control of a Quadrotor with Active Geometric Morphing. Ph.D. Dissertation, Washington University, St. Louis, MO, USA, 2016. [Google Scholar]
- Bucki, N.; Mueller, M.W. Drone reconfigurable architecture Design and control of a passively morphing quadcopter. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 9116–9122. [Google Scholar]
- Bai, Y.; Gururajan, S. Evaluation of a baseline controller for autonomous “figure-8” flights of a morphing geometry quadcopter: Flight performance. Drones 2019, 3, 70. [Google Scholar] [CrossRef] [Green Version]
- Meiri, N.; Zarrouk, D. Flying star, a hybrid crawling and flying sprawl tuned robot. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5302–5308. [Google Scholar]
- Desbiez, A.; Expert, F.; Boyron, M.; Diperi, J.; Viollet, S.; Ruffier, F. X-morf: A crash-separable quadrotor that morfs its x-geometry in flight. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linköping, Sweden, 3–5 October 2017; pp. 222–227. [Google Scholar]
- Kamil, Y.; Hazry, D.; Wan, K.; Razlan, Z.M.; Shahriman, A.B. Design a new model of unmanned aerial vehicle quadrotor using the variation in the length of the arm. In Proceedings of the 2017 International Conference on Artificial Life and Robotics (ICAROB 2017), Miyazaki, Japan, 19–22 January 2017; pp. 723–726. [Google Scholar]
- Oktay, T.; Oguz, K. Non simultaneous morphing system design for yaw motion in quadrotors. J. Aviat. 2019, 3, 81–88. [Google Scholar]
- Köse, O.; Oktay, T. Non simultaneous morphing system desing for quadrotors. Avrupa Bilim Ve Teknol. Derg. 2019, 16, 577–588. [Google Scholar]
- Falanga, D.; Kleber, K.; Mintchev, S.; Floreano, D.; Scaramuzza, D. The foldable drone: A morphing quadrotor that can squeeze and fly. IEEE Robot. Autom. Lett. 2018, 4, 209–216. [Google Scholar] [CrossRef] [Green Version]
- Fabris, A.; Kleber, K.; Falanga, D.; Scaramuzza, D. Geometry aware compensation scheme for morphing drones. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020. [Google Scholar]
- Riviere, V.; Manecy, A.; Viollet, S. Agile robotic fliers: A morphing-based approach. Soft Robot. 2018, 5, 541–553. [Google Scholar] [CrossRef] [PubMed]
- Rizon, M.; Ang, C.; Solihin, M.I.; Razlan, Z.M.; Desa, H.; Bakar, S.A.; Khairunizam, W.; Ibrahim, Z. Effects of variable arm length on uav control systems. J. Robot. Netw. Artif. Life 2020, 7, 91–97. [Google Scholar] [CrossRef]
- Hedayati, H.; Suzuki1, R.; Leithinger, D.; Szafir, D. Pufferbot: Actuated expandable structures for aerial robots. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020. [Google Scholar]
- Shi, F.; Zhao, M.; Murooka, M.; Okada, K.; Inaba, M. Aerial regrasping: Pivoting with transformable multilink aerial robot. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 200–207. [Google Scholar]
- Derrouaoui, S.H.; Guiatni, M.; Bouzid, Y.; Dib, I.; Moudjari, N. Dynamic modeling of a transformable quadrotor. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1714–1719. [Google Scholar]
- Derrouaoui, S.H.; Bouzid, Y.; Guiatni, M.; Dib, I.; Moudjari, N. Design and modeling of unconventional quadrotors. In Proceedings of the 2020 28th Mediterranean Conference on Control and Automation (MED), Saint-Raphaël, France, 15–18 September 2020; pp. 721–726. [Google Scholar]
- Xiong, H.; Hu, J.; Diao, X. Optimize energy efficiency of quadrotors via arm rotation. J. Dyn. Syst. Meas. Control 2019, 141, 091002. [Google Scholar] [CrossRef]
- Tuna, T.; Ovur, S.E.; Gokbel, E.; Kumbasar, T. Folly: A self foldable and self deployable autonomous quadcopter. In Proceedings of the 2018 6th International Conference on Control Engineering and Information Technology (CEIT), Istanbul, Turkey, 25–27 October 2018; pp. 1–6. [Google Scholar]
- Pastor, D.; Izraelevitz, J.; Nadan, P.; Bouman, A.; Burdick, J.; Kennedy, B. Design of a ballistically-launched foldable multirotor. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 5212–5218. [Google Scholar]
- Chen, M.; Wu, Q.-X.; Cui, R.-X. Terminal sliding mode tracking control for a class of siso uncertain nonlinear systems. ISA Trans. 2013, 52, 198–206. [Google Scholar] [CrossRef] [PubMed]
- Shi, X.; Cheng, Y. Adaptive fast terminal sliding mode (ftsm) control design for quadrotor uav under external windy disturbances. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 512–516. [Google Scholar]
- Shi, Y.; Eberhart, R.C. Empirical study of particle swarm optimization. In Proceedings of the IEEE/Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; Volume 3, pp. 1945–1950. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Morphology | Arm Angles and Lengths |
|---|---|
| = , = , = , = | |
| = 0, = 0, = 0, = 0 | |
| = , = , = , = 0 | |
| = L, = L, = L, = L | |
| = 0, = , = , = 0 | |
| = L, = L, = L, = L | |
| = , = 0, = , = | |
| = L, = L, = L, = L | |
| = , = 0, = , = 0 | |
| = 0, = 0, = 0, = 0 |
| Parameter | Value |
|---|---|
| 11 | |
| 13 | |
| 9.77 | |
| 6.83 | |
| 0.41 | |
| 1.18 |
| Gains | |||
|---|---|---|---|
| Value | 18.23 | 8.09 | 0.54 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Derrouaoui, S.H.; Bouzid, Y.; Guiatni, M. Nonlinear Robust Control of a New Reconfigurable Unmanned Aerial Vehicle. Robotics 2021, 10, 76. https://doi.org/10.3390/robotics10020076
Derrouaoui SH, Bouzid Y, Guiatni M. Nonlinear Robust Control of a New Reconfigurable Unmanned Aerial Vehicle. Robotics. 2021; 10(2):76. https://doi.org/10.3390/robotics10020076
Chicago/Turabian StyleDerrouaoui, Saddam Hocine, Yasser Bouzid, and Mohamed Guiatni. 2021. "Nonlinear Robust Control of a New Reconfigurable Unmanned Aerial Vehicle" Robotics 10, no. 2: 76. https://doi.org/10.3390/robotics10020076
APA StyleDerrouaoui, S. H., Bouzid, Y., & Guiatni, M. (2021). Nonlinear Robust Control of a New Reconfigurable Unmanned Aerial Vehicle. Robotics, 10(2), 76. https://doi.org/10.3390/robotics10020076