
A Novel, Oriented to Graphs Model of Robot Arm Dynamics


Abstract
:1. Introduction
2. Materials and Methods
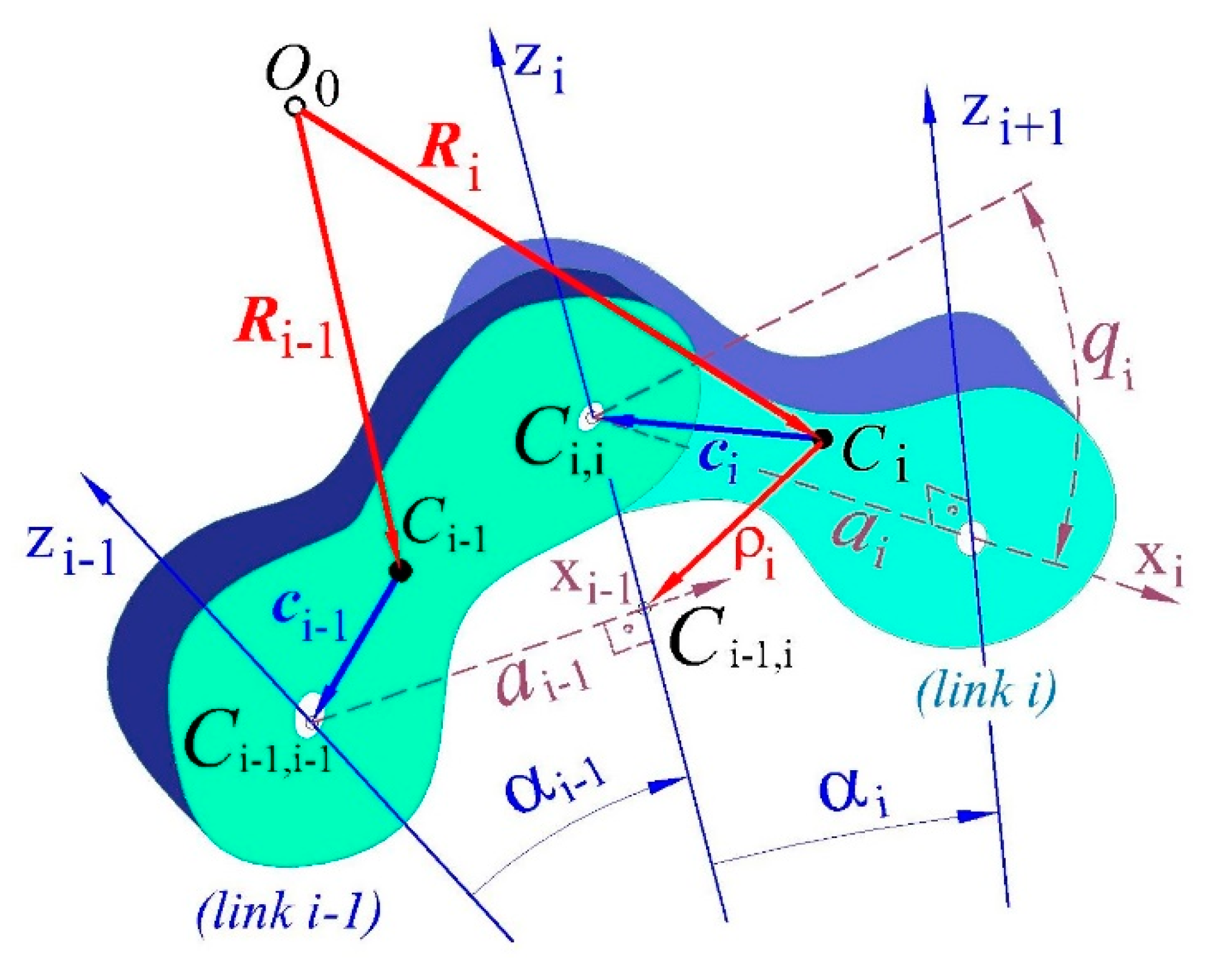
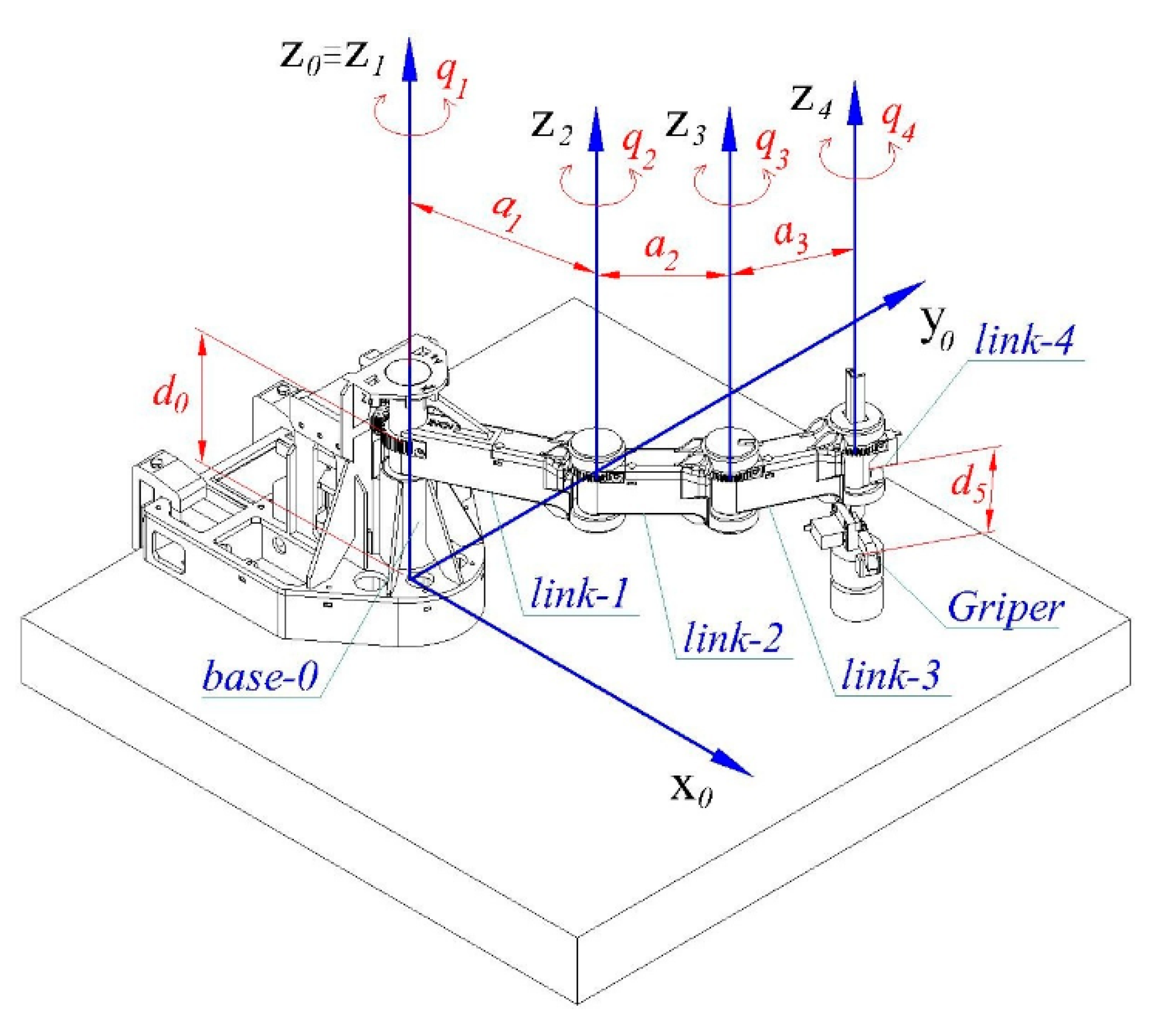
2.1. Kinematics
2.2. Dynamics
2.2.1. Energy Graph Associated with Robot Arm
- The D’Alembert forces , associated with the edges numbered in black and denoted by .
- The forces , applied in the points with the edges numbered in blue and denoted by −1. Note, that only because the first body is linked with the base coordinate system.
- The resultant of the external forces , applied in the mass centers are represented by edges numbered in green frame.
- The forces of interaction between the adjacent bodies are represented by edges numbered in red and denoted by .
- The radius-vectors of the mass-centers and the points starting from .
- The local radius-vectors of relative to the mass centers for the remaining edges.
- The D’Alembert torques , associated with the edges numbered in black and denoted by .
- The torques , acting on the points associated with the edges numbered in blue and denoted by −1. Note, that only because the first body is linked with the base coordinate system.
- The resultant of the external torques applied in the joint axes s are represented by edges numbered in the green frame by .
- The torques of interaction between the connected bodies are represented by edges numbered in red and denoted by .
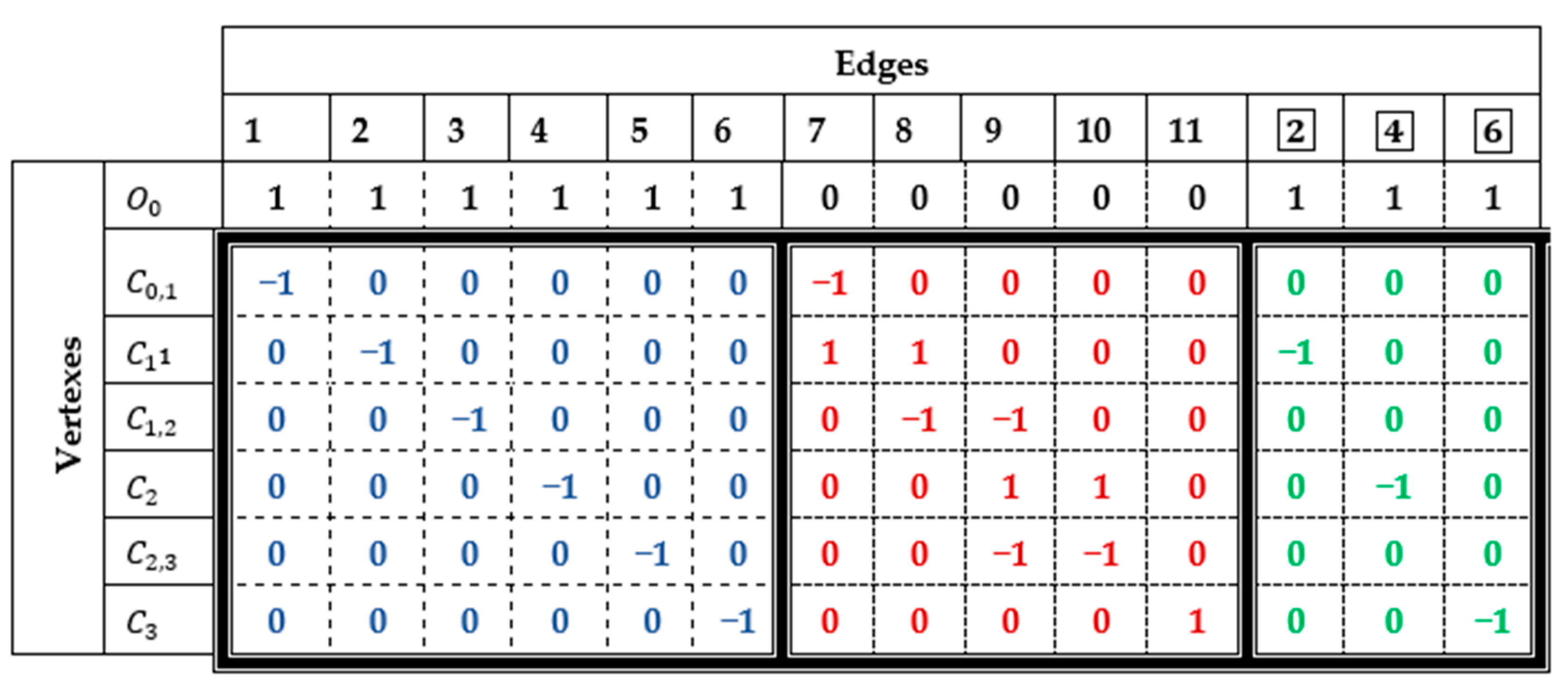
2.2.2. Cut-Set and Circuit Equations
- if edge is not incident with vertex ,
- , if edge starts from vertex
- , if edge enters vertex .
- if edge does not belong to the cycle ,
- , if edge has the same orientation as cycle
- , if edge has the opposite orientation as cycle .
2.2.3. Terminal and Connection Equations
2.2.4. Procedure for Deriving the Differential Equations of Motion
3. Results
3.1. Kinematics and Dynamics Characteristics of the Robot Arm
3.2. Case Study
3.2.1. Dynamical Equations
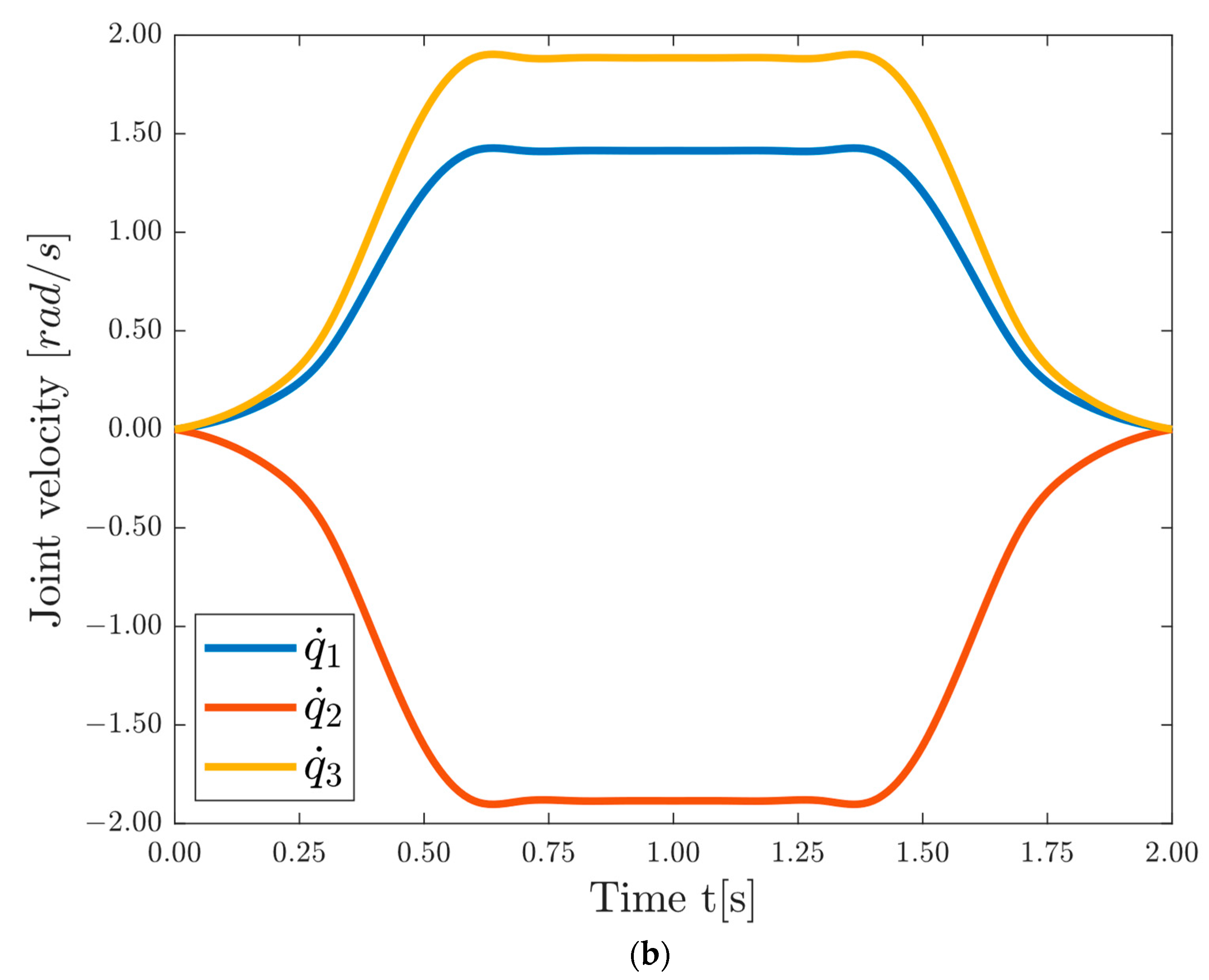
3.2.2. Computer Experiments
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- AlAttar, A.; Kormushev, P. Kinematic-Model-Free Orientation Control for Robot Manipulation Using Locally Weighted Dual Quaternions. Robotics 2020, 9, 76. [Google Scholar] [CrossRef]
- Khalil, W. Dynamic Modeling of Robots using Recursive Newton-Euler Techniques. In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, Volume 1, Funchal, Madeira, Portugal, 15–18 June 2010; pp. 19–31. [Google Scholar]
- Park, F.C.; Lynch, K.M. Modern Robotics. Mechanics, Planning and Control; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Xidias, E.K.; Aspragathos, N.A. Time sub-optimal path planning for hyper redundant manipulators amidst narrow passages in 3D workspaces. In Advances on Theory and Practice of Robots and Manipulators; Springer: Cham, Switzerland, 2014; pp. 445–452. [Google Scholar]
- Valsamos, C.; Moulianitis, V.; Aspragathos, N. Kinematic Synthesis of Structures for Metamorphic Serial Manipulators. ASME J. Mechan. Robot. 2014, 6, 041005. [Google Scholar] [CrossRef]
- Valsamos, C.; Wolniakowski, A.; Miatliuk, K.; Moulianitis, V.C. Minimization of Joint Velocities During the Execution of a Robotic Task by a 6 D.o.F. Articulated Manipulator. In Advances in Service and Industrial Robotics; Aspragathos, N.A., Koustoumpardis, P.N., Moulianitis, V.C., Eds.; Springer: Cham, Switzerland, 2019; Volume 67, pp. 368–375. [Google Scholar]
- Bottin, M.; Rosati, G. Trajectory Optimization of a Redundant Serial Robot Using Cartesian via Points and Kinematic Decoupling. Robotics 2019, 8, 101. [Google Scholar] [CrossRef] [Green Version]
- Jin, L.; Li, S.; La, H.; Luo, X. Manipulability optimization of redundant manipulators using dynamic neural networks. IEEE Trans. Indust. Electron. 2017, 64, 4710–4720. [Google Scholar] [CrossRef]
- Dimeas, F. Singularity Avoidance in Human-Robot Collaboration with Performance Constraints. In Human-Friendly Robotics. Springer Proceedings in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2020; Volume 18, pp. 89–100. [Google Scholar]
- Rosati, G.; Boschetti, G.; Carbone, G. Advances in Mechanical Systems Dynamics. Robotics 2020, 9, 12. [Google Scholar] [CrossRef] [Green Version]
- Carabin, G.; Wehrle, E.; Vidoni, R.A. Review on Energy-Saving Optimization Methods for Robotic and Automatic Systems. Robotics 2017, 6, 39. [Google Scholar] [CrossRef] [Green Version]
- Kurdila, A.J.; Pinhas, B.-T. Dynamics and Control of Robotic Systems; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Featherstone, R.; Orin, D. Robot Dynamics: Equations and Algorithms. In Proceedings of the IEEE International Conference Robotics & Automation, San Francisco, CA, USA, 24–28 April 2000; pp. 826–834. [Google Scholar]
- Pryce, J.D.; Nedialkov, N. Another Multibody Dynamics in Natural Coordinates through Automatic Differentiation and High-Index DAE Solving. Acta Cybern. 2020, 24, 315–341. [Google Scholar] [CrossRef] [Green Version]
- Neimark, J.I. Electromechanical analogies. Lagrange-Maxwell equations. In Mathematical Models in Natural Science and Engineering. Foundations of Engineering Mechanics; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar] [CrossRef]
- Kotev, V.; Boiadjiev, G.; Kawasaki, H.; Mouri, T.; Delchev, K.; Boiadjiev, T. Design of a hand-held robotized module for bone drilling and cutting in orthopedic surgery. In Proceedings of the 2012 IEEE/SICE International Symposium on System Integration (SII), Fukuoka, Japan, 16–18 December 2012; pp. 504–509. [Google Scholar] [CrossRef]
- Guechi, E.-H.; Bouzoualegh, S.; Zennir, Y.; Blažič, S. MPC Control and LQ Optimal Control of A Two-Link Robot Arm: A Comparative Study. Machines 2018, 6, 37. [Google Scholar] [CrossRef] [Green Version]
- Yovchev, K.; Delchev, K.; Krastev, E. State Space Constrained Iterative Learning Control for Robotic Manipulators. Asian J. Control 2018, 20, 1–6. [Google Scholar] [CrossRef]
- Liang, B.; Li, T.; Chen, Z.; Wang, Y.; Liao, Y. Robot Arm Dynamics Control Based on Deep Learning and Physical Simulation. In Proceedings of the 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 2921–2925. [Google Scholar]
- Franciosa, P.; Gerbino, S. A CAD-Based Methodology for Motion and Constraint Analysis According to Screw Theory. In Proceedings of the 2009 ASME International Mechanical Engineering Congress and Exposition. Volume 4: Design and Manufacturing, Lake Buena Vista, FL, USA, 13–19 November 2009; pp. 287–296. [Google Scholar] [CrossRef]
- Damic, V.; Cohodar, M.; Kobilica, N. Development of Dynamic Model of Robot with Parallel Structure Based on 3D CAD Model. In Proceedings of the 30th DAAAM International Symposium, Vienna, Austria, 23–26 October 2019; pp. 155–160. [Google Scholar] [CrossRef]
- Bejczy, A.K. Robot Arm Dynamics and Control; Technical memorandum 33-699, Jet Propulsion Laboratory; NASA: Washington, DC, USA, 1974.
- Tellegen, B.D.H. A General Network Theorem, with Application. Philips Res. Rep. 1952, 7, 259–296. [Google Scholar]
- Koenig, H.; Blackwell, W. Electromechanical System Theory; McGraw-Hill: New York, NY, USA, 1961. [Google Scholar]
- Andrews, G. Dynamics Using Vector-Network Techniques; University of Waterloo, Department of Mechanical Engineering: Waterloo, ON, Canada, 1977. [Google Scholar]
- Bojadjiev, G.; Lilov, L. Dynamics of Multicomponent Systems Based on the Orthogonality Principle. J. Theor. Appl. Mech. 1993, XXIV, 11–26. [Google Scholar]
- Schmitke, C.; McPhee, J. Using linear graph theory and the principle of orthogonality to model multibody, multi-domain systems. Adv. Eng. Inform. 2008, 22, 147–160. [Google Scholar] [CrossRef]
- Boiadjiev, G.; Kotev, V.; Delchev, K.; Boiadjiev, T. Modeling and Development of a Robotized Hand-Hold Bone Cutting Device OCRO. Int. J. Appl. Mech. Mater. 2013, 300–301, 479–483. [Google Scholar] [CrossRef]
- Boiadjiev, G.; Chavdarov, I.; Miteva, L. Dynamics of a Planar Redundant Robot Based on Energy Conservation Law and Graph Theory. In Proceedings of the 2020 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Hvar, Croatia, 17–19 September 2020; pp. 1–6. [Google Scholar]
- Corke, P. Robotics, Vision and Control. Fundamental Algorithms in MATLAB, 2nd ed.; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | 0.15 | |
| 2 | 0 | 0.15 | 0 | |
| 3 | 0 | 0.1 | 0 | |
| 4 | 0 | 0.1 | 0 | |
| 5 | 0 | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boiadjiev, G.; Krastev, E.; Chavdarov, I.; Miteva, L. A Novel, Oriented to Graphs Model of Robot Arm Dynamics. Robotics 2021, 10, 128. https://doi.org/10.3390/robotics10040128
Boiadjiev G, Krastev E, Chavdarov I, Miteva L. A Novel, Oriented to Graphs Model of Robot Arm Dynamics. Robotics. 2021; 10(4):128. https://doi.org/10.3390/robotics10040128
Chicago/Turabian StyleBoiadjiev, George, Evgeniy Krastev, Ivan Chavdarov, and Lyubomira Miteva. 2021. "A Novel, Oriented to Graphs Model of Robot Arm Dynamics" Robotics 10, no. 4: 128. https://doi.org/10.3390/robotics10040128
APA StyleBoiadjiev, G., Krastev, E., Chavdarov, I., & Miteva, L. (2021). A Novel, Oriented to Graphs Model of Robot Arm Dynamics. Robotics, 10(4), 128. https://doi.org/10.3390/robotics10040128