
3D Change Detection Using Adaptive Thresholds Based on Local Point Cloud Density


Abstract
:1. Introduction
2. Methods
2.1. Preliminaries
2.2. Adaptive Thresholds Based on Local Point Cloud Density
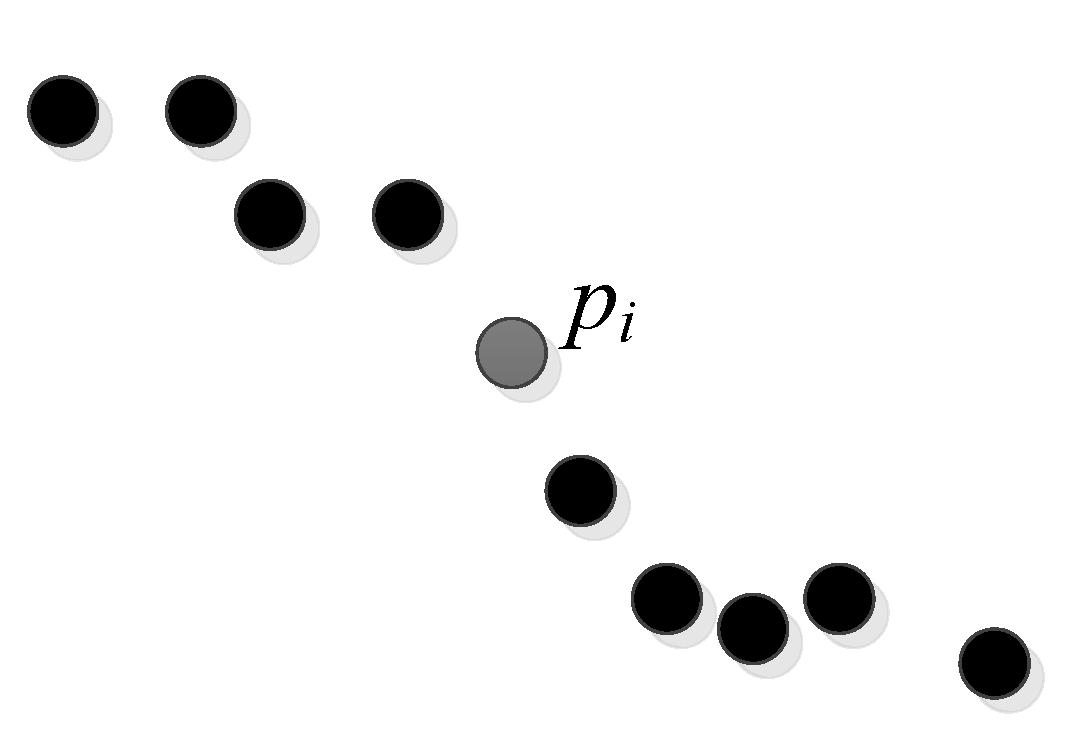
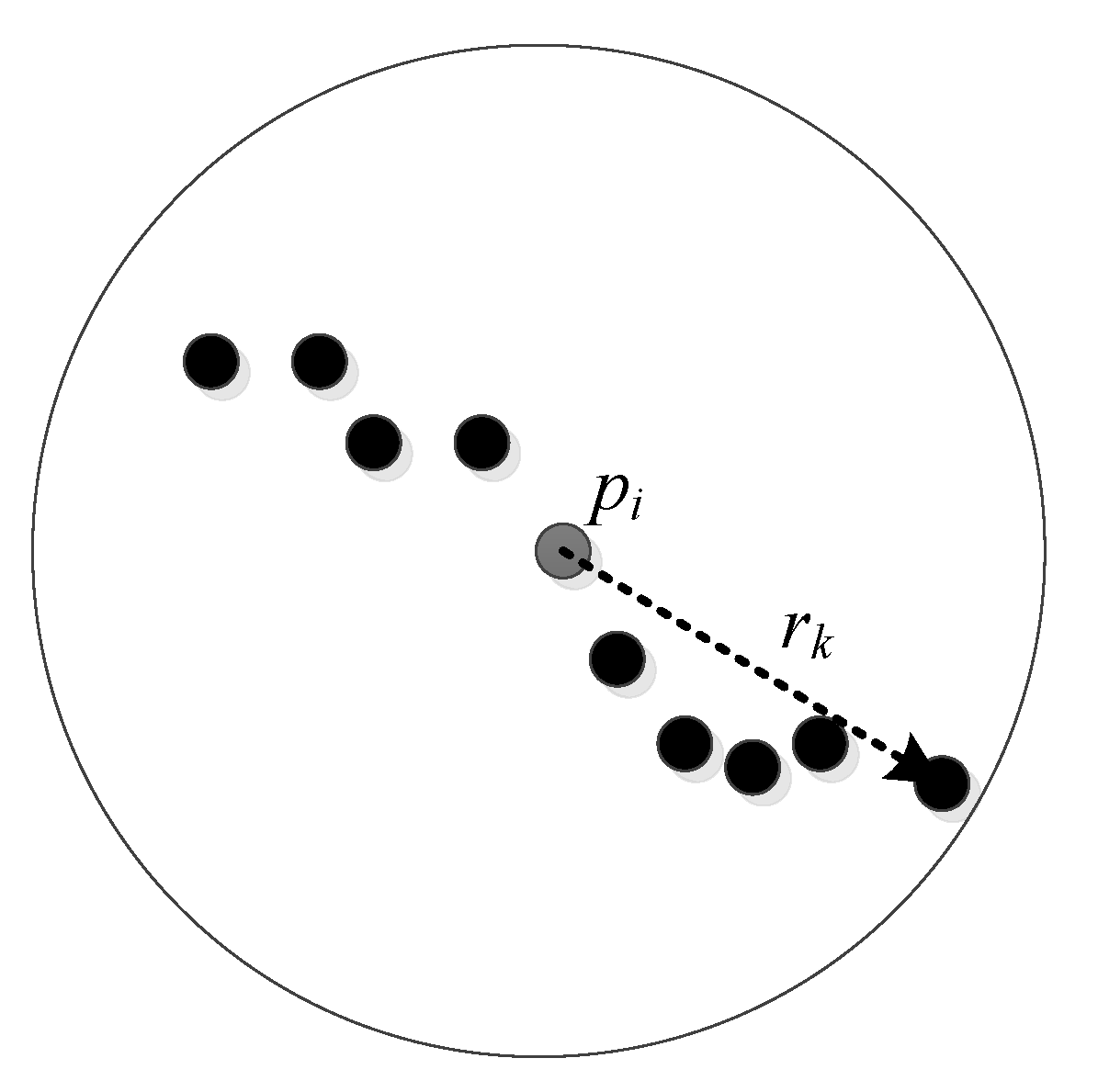
2.2.1. K-Neighboring Average Distance
2.2.2. Local Point Cloud Density
2.3. Implementation of 3D Change Detection Using Adaptive Thresholds
- (1)
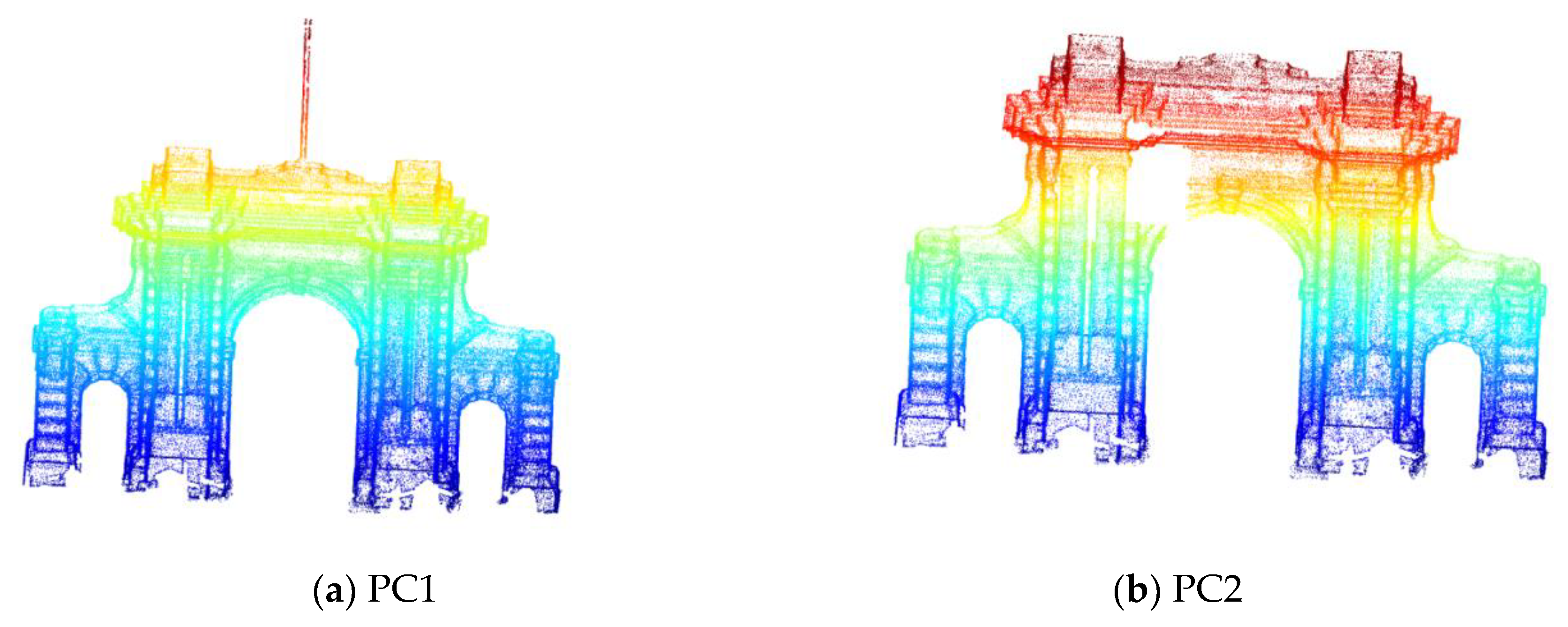
- Select a point in the compared point clouds PC1.
- (2)
- In the referenced point clouds PC2, search the nearest point to the point .
- (3)
- According to Equation (1), calculate the Euclidean distance .
- (4)
- In the point clouds PC1, search the k-neighboring points to the point .
- (5)
- According to Equations (3) and (4), compute the k-neighboring average distance of PC1.
- (6)
- According to Equations (5) and (6), compute the local point density and its normalized value .
- (7)
- Calculate the threshold of point using Equation (7).
- (8)
- Detect whether point has changed. If , then a change in has occurred.
- (9)
- Use the above steps to detect changes in all the points in the point cloud PC1.
3. Experimental Results and Discussion
3.1. Experimental Data
3.2. Results and Discussion
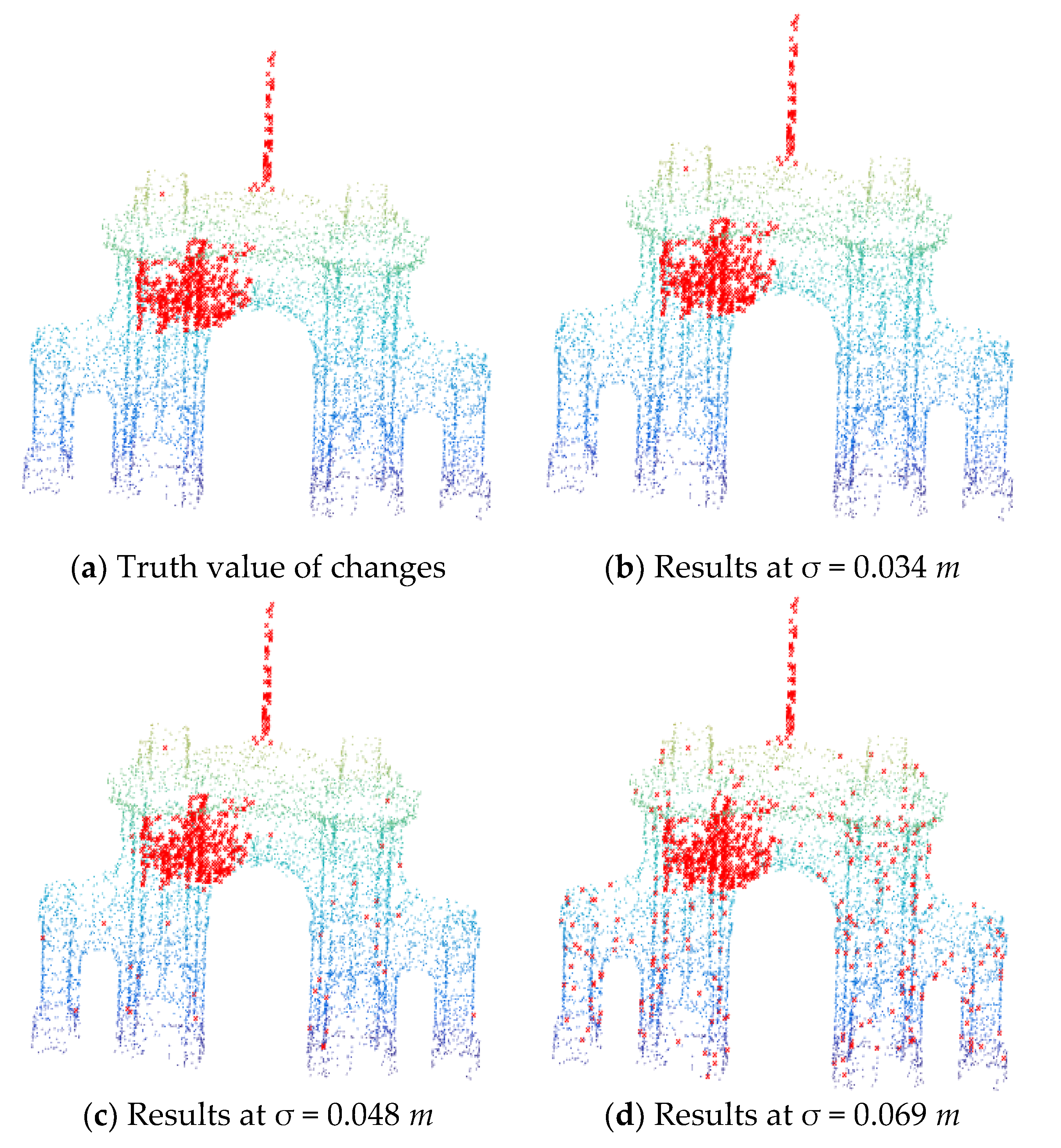
- (a)
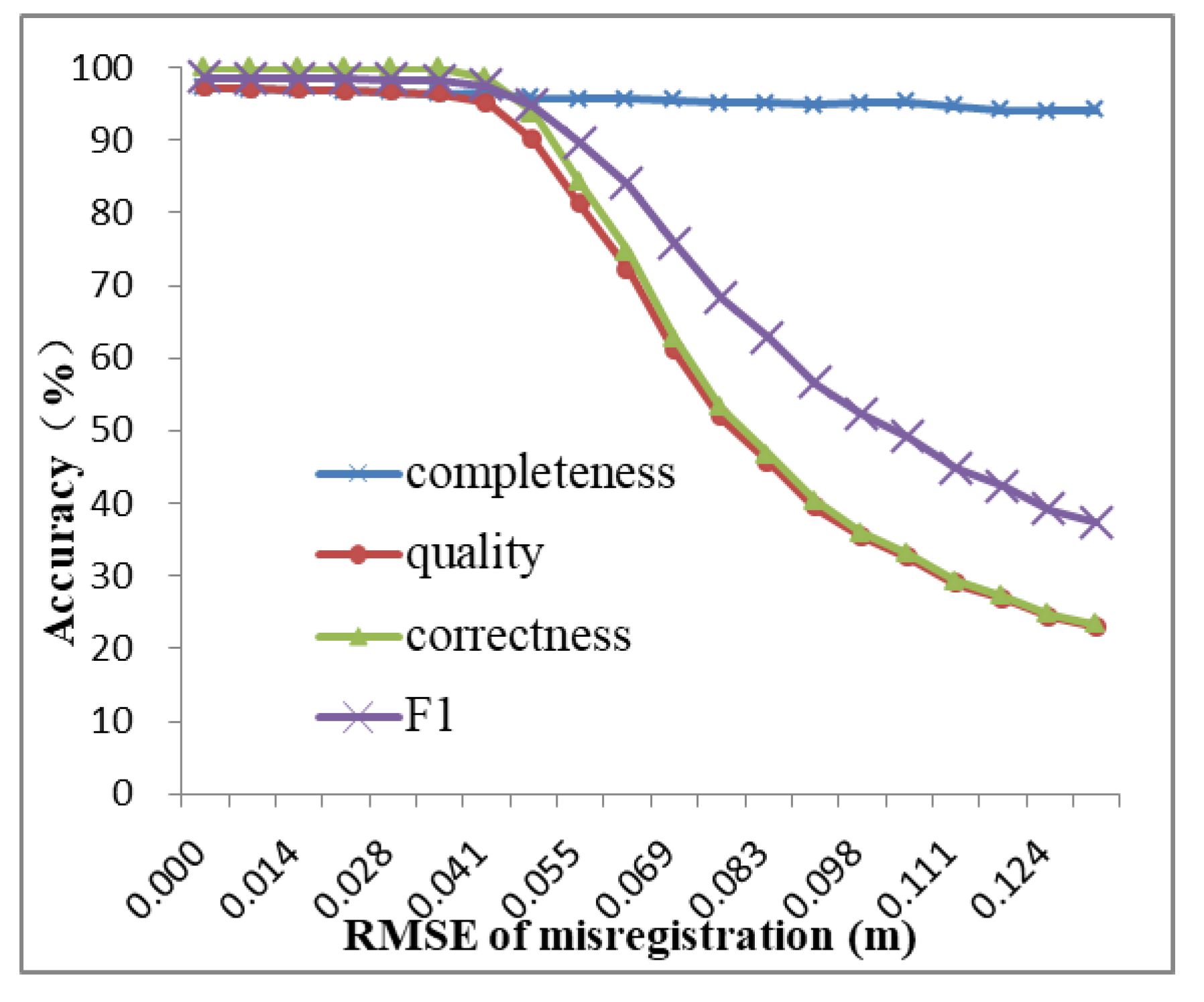
- As the misregistration of two point clouds increases, the values of the indicators correctness, quality, and F1 obtained through Equation (8) become lower. There is no evident changes in the value of completeness (completeness > 90% in all the errors of image registration), which means that most of the change points can be detected correctly. However, FP, i.e., non-changed points incorrectly detected as change points, becomes larger as the registration error increases. Therefore, misregistration of point clouds has significant effects on 3D change detection.
- (b)
- (a)
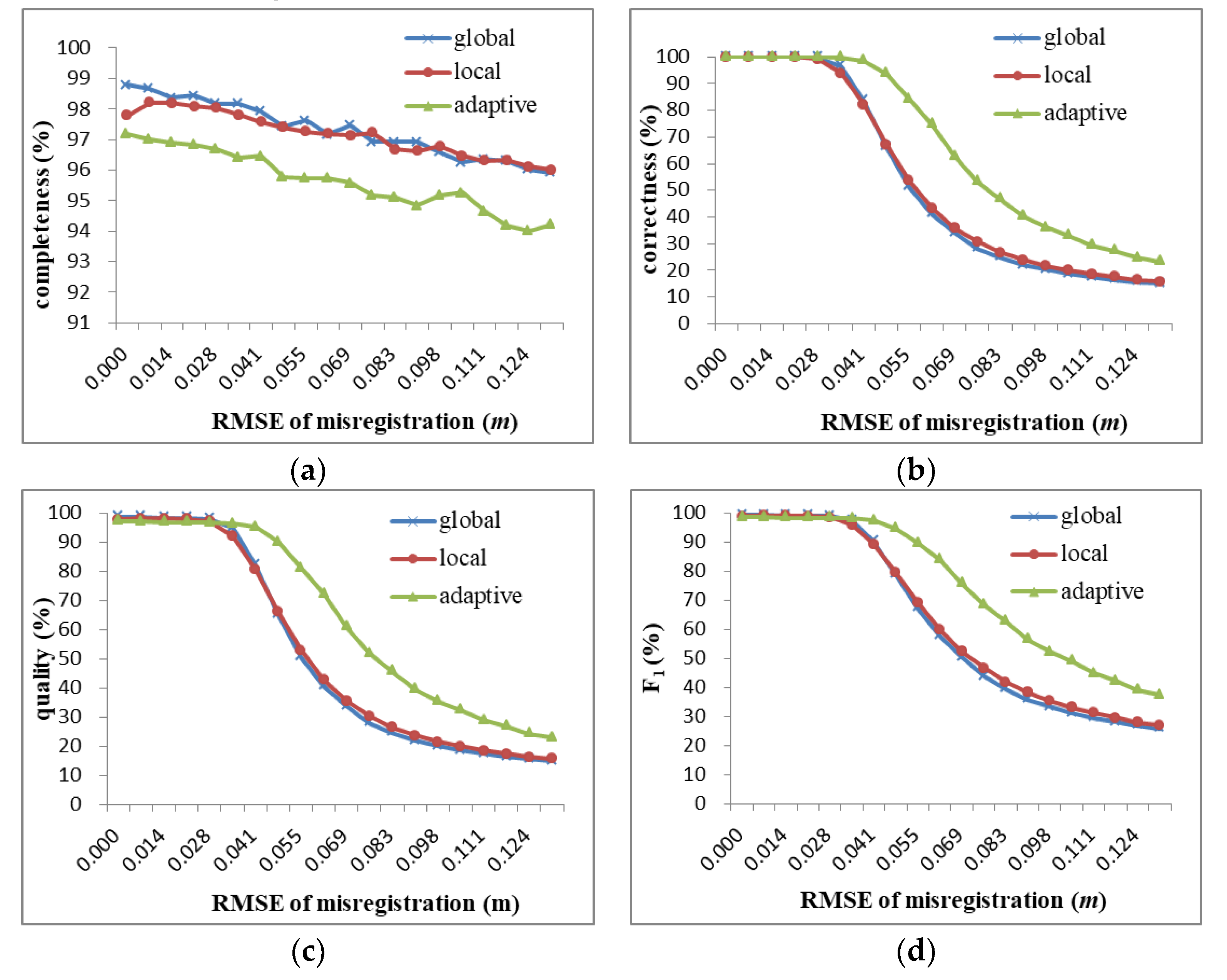
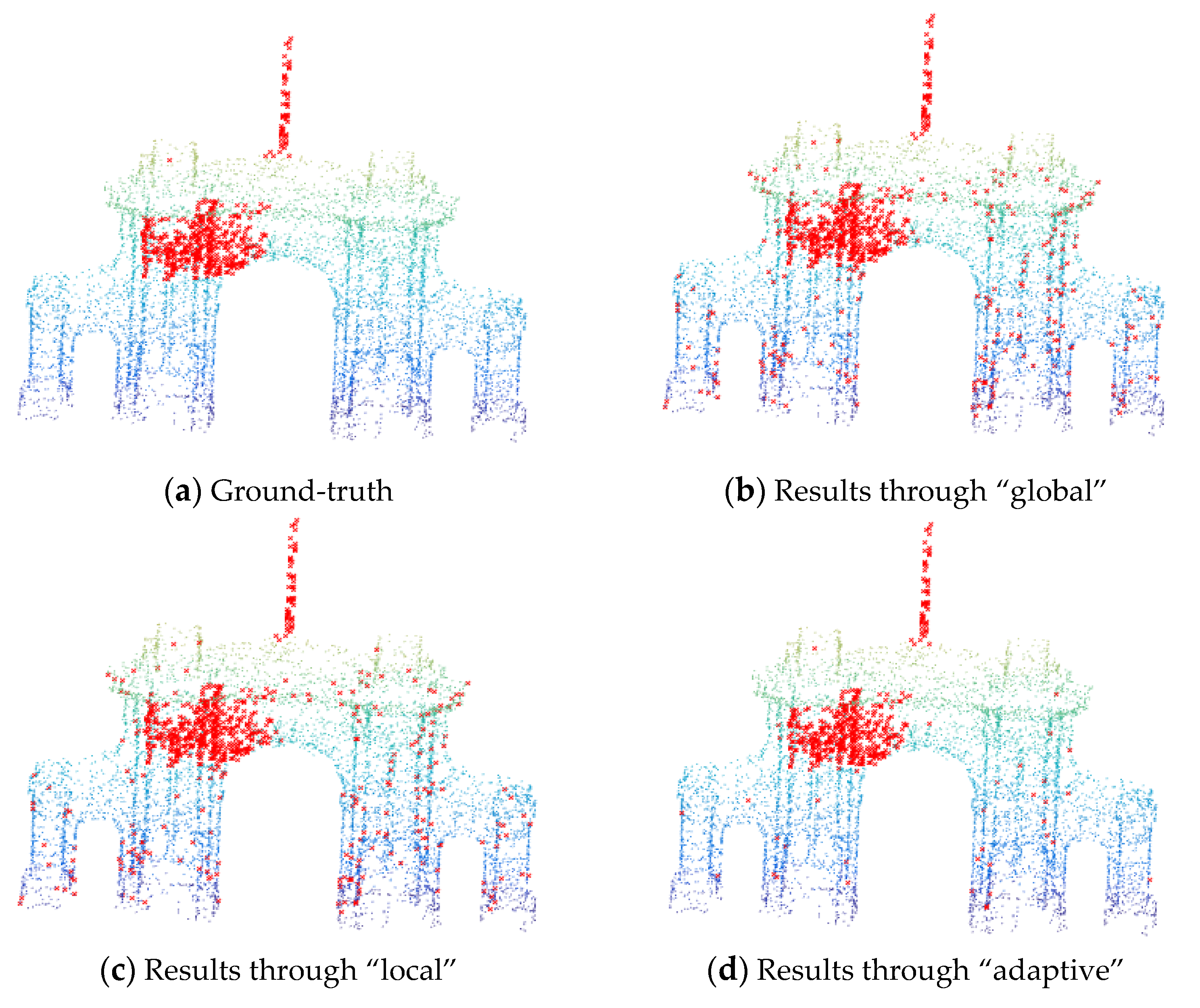
- When the registration error is very weak, all the methods using the above three thresholds can obtain appropriate accuracy. However, the method using the adaptive thresholds significantly outperforms the other methods with the increase in registration error .
- (b)
- When the registration error is larger than 0.04 m, the performance of change detection using the global and local thresholds decline rapidly. Thus, the registration error of the point clouds should be less than 1/2 of the average distance of point clouds for 3D change detection using the global and local thresholds. However, for the method using the adaptive thresholds, the registration error can be relaxed to the average distance of the point clouds. Therefore, the method using adaptive thresholds can obtain more satisfactory results than the two other methods.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Q.; Wang, J.; Peng, X.; Gong, P.; Shi, P. Urban built-up land change detection with road density and spectral information from multi-temporal Landsat TM data. Int. J. Remote Sens. 2002, 23, 3057–3078. [Google Scholar] [CrossRef]
- Im, J.; Jensen, J.R. A change detection model based on neighboring correlation image analysis and decision tree classification. Remote Sens. Environ. 2005, 99, 326–340. [Google Scholar] [CrossRef]
- Lin, Y.; Zhang, L.; Wang, N.; Zhang, X.; Cen, Y.; Sun, X. A change detection method using spatial-temporal-spectral information from Landsat images. Int. J. Remote Sens. 2019, 41, 1–22. [Google Scholar] [CrossRef]
- Bolorinos, J.; Ajami, N.K.; Rajagopal, R. Consumption Change Detection for Urban Planning: Monitoring and Segmenting Water Customers during Drought. Water Resour. Res. 2020, 56, 1217–1248. [Google Scholar] [CrossRef]
- Hyyppa, J.; Jaakkola, A.; Hyyppa, H.; Kaartinen, H.; Kukko, A.; Holopainen, M.; Zhu, L.; Vastaranta, M.; Kaasalainen, S.; Krooks, A.; et al. Map updating and change detection using vehicle-based laser scanning. In Proceedings of the 2009 Joint Urban Remote Sensing Event, Shanghai, China, 20–22 May 2009. [Google Scholar]
- Kim, C.; Kim, B.; Kim, H. 4D CAD Model updating using image processing-based construction progress monitoring. Autom. Constr. 2013, 35, 44–52. [Google Scholar] [CrossRef]
- Matikainen, L.; Pandi, M.; Li, F.S.; Karila, K.; Hyyppä, J.; Litkey, P.; Kukko, A.; Lehtomäki, M.; Karjalaine, M.; Puttonen, E. Toward utilizing multitemporal multispectral airborne laser scanning, Sentinel-2, and mobile laser scanning in map updating. J. App. Remote Sens. 2019, 13, 044504. [Google Scholar] [CrossRef]
- Leena, M.; Juha, H.; Eero, A.; Markelin, L.; Kaartinen, H. Automatic detection of buildings and changes in buildings for updating of maps. Remote Sens. 2010, 2, 1217–1248. [Google Scholar]
- Rebolj, D.; Babi, N.U.; Magdi, A.; Podbreznik, P.; Pšunder, M. Automated construction activity monitoring system. Adv. Eng. Inform. 2008, 22, 493–503. [Google Scholar] [CrossRef]
- Li, W.; Sun, K.; Li, D.; Bai, T.; Sui, H. A New Approach to Performing Bundle Adjustment for Time Series UAV Images 3D Building Change Detection. Remote Sens. 2017, 9, 625. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Deng, L.; Duan, Y.; Huang, S.; Zhou, J. Building change detection based on 3D reconstruction. In Proceedings of the 2015 IEEE International Conference on Image Processing, Quebec, QC, Canada, 27–30 September 2015. [Google Scholar]
- Stal, C.; Tack, F.; Maeyer, P.D.; Wulf, A.D.; Goossens, R. Airborne photogrammetry and LiDAR for DSM extraction and 3D change detection over an urban area—A comparative study. Int. J. Remote Sens. 2013, 34, 1087–1110. [Google Scholar] [CrossRef] [Green Version]
- Kim, A.M.; Runyon, S.C.; Jalobeanu, A.; Esterline, C.H.; Kruse, F.A. LiDAR change detection using building models. In Proceedings of the SPIE 9080, Laser Radar Technology & Applications Xix & Atmospheric Propagation XI, Baltimore, MD, USA, 6–7 May 2014. [Google Scholar]
- Qin, R.; Tian, J.; Reinartz, P. 3D change detection—Approaches and applications. ISPRS J. Photogramm. Remote Sens. 2016, 122, 41–56. [Google Scholar] [CrossRef] [Green Version]
- Dong, P.L.; Zhong, R.F.; Yigit, A. Automated parcel-based building change detection using multitemporal airborne LiDAR data. Survey. Land Inform. Sci. 2018, 77, 5–13. [Google Scholar]
- Shirowzhan, S.; Samad, S.M.E.; Li, H.; Trinder, J.; Tang, P. Comparative analysis of machine learning and point-based algorithms for detecting 3D changes in buildings over time using bi-temporal LiDAR data. Autom. Construct. 2019, 105, 102841. [Google Scholar] [CrossRef]
- Santos, R.C.D.; Galo, M.; Carrilho, A.C.; Pessoa, G.G.; de Oliveira, R.A.R. Automatic building change detection using multi-temporal airbone Lidar data. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2020 IEEE Latin American GRSS & ISPRS Remote Sensing Conference, Santiago, Chile, 21–26 March 2020; Volume XLII-3/W12-2020. [Google Scholar]
- Eltner, A.; Schneider, D. Analysis of Different Methods for 3D Reconstruction of Natural Surfaces from Parallel-Axes UAV Images. Photogramm. Rec. 2015, 30, 279–299. [Google Scholar] [CrossRef]
- Qu, Y.; Huang, J.; Zhang, X. Rapid 3D Reconstruction for Image Sequence Acquired from UAV Camera. Sensors 2018, 18, 225. [Google Scholar]
- Shahbazi, M.; Menard, P.; Sohn, G.; Théau, J. Unmanned aerial image dataset: Ready for 3D reconstruction. Data Brief 2019, 25, 103962. [Google Scholar] [CrossRef] [PubMed]
- Adilson, B.; Tommaselli, A.M.G. Automatic Orientation of Multi-Scale Terrestrial Images for 3D Reconstruction. Remote Sens. 2014, 6, 3020–3040. [Google Scholar]
- Liu, D.; Liu, X.J.; Wu, Y.G. Depth Reconstruction from Single Images Using a Convolutional Neural Network and a Condition Random Field Model. Sensors 2018, 18, 1318. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kundu, A.; Li, Y.; Dellaert, F.; Li, F.; Rehg, J.M. Joint Semantic Segmentation and 3D Reconstruction from Monocular Video. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Gerdes, K.; Pedro, M.Z.; Schwarz-Schampera, U.; Schwentner, M.; Kihara, T.C. Detailed Mapping of Hydrothermal Vent Fauna: A 3D Reconstruction Approach Based on Video Imagery. Front. Marine Sci. 2019, 6, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Murakami, H.; Nakagawa, K.; Hasegawa, H.; Shibata, T.; Iwanami, E. Change detection of buildings using an airborne laser scanner. ISPRS J. Photogramm. Remote Sens. 1999, 54, 148–152. [Google Scholar] [CrossRef]
- Vögtle, T.; Steinle, E. Detection and recognition of changes in building geometry derived from multitemporal laser scanning data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 428–433. [Google Scholar]
- Chaabouni-Chouayakh, H.; Krauss, T.; d’Angelo, P.; Peter, R. 3D change detection inside urban areas using different digital surface models. In Proceedings of the PCV 2010—ISPRS Technical Commission III Symposium on Photogrammetry Computer Vision and Image Analysis, Paris, France, 1–3 September 2010. [Google Scholar]
- Yamazaki, F.; Liu, W.; Moya, L. Use of multitemporal LiDAR data to extract changes due to the 2016 Kumamoto earthquake. In Proceedings of the Remote Sensing Technologies and Applications in Urban Environments II, Warsaw, Poland, 11–12 September 2017. Society of Photo-Optical Instrumentation Engineers (SPIE) Conference Series. [Google Scholar]
- Choi, K.; Lee, I.; Kim, S. A feature based approach to automatic change detection from LiDAR data in urban areas. Int. Arch. Photogramm. Remote Sens. 2009, 25, 259–264. [Google Scholar]
- Xiao, W.; Xu, S.; Elberink, S.O.; Vosselman, G. Change detection of trees in urban areas using multi-temporal airborne LiDAR point clouds. In Proceedings of the Remote Sensing of the Ocean, Sea Ice, Coastal Waters, and Large Water Regions, Edinburgh, UK, 26–27 September 2012. [Google Scholar]
- Memoli, F.; Sapiro, G. Comparing point clouds. In Proceedings of the Eurographics Symposium on Geometry Processing, Nice, France, 8–10 July 2004; pp. 32–40. [Google Scholar]
- Antova, G. Application of areal change detection methods using point clouds data. Earth Environ. Sci. 2019, 221, 012082. [Google Scholar] [CrossRef]
- Girardeau-Montaut, D.; Roux, M.; Marc, R.; Marc, R.; Thibault, G. Change detection on point cloud data acquired with a ground laser scanner. In Proceedings of the ISPRS Workshop Laser Scanning, Enschede, The Netherlands, 12–14 September 2005. [Google Scholar]
- Xu, H.; Cheng, L.; Li, M.; Chen, Y.; Zhong, L. Using Octrees to Detect Changes to Buildings and Trees in the Urban Environment from Airborne LiDAR Data. Remote Sens. 2015, 7, 9682–9704. [Google Scholar] [CrossRef] [Green Version]
- Xiao, W.; Vallet, B.; Paparoditis, N. Change detection in 3D point clouds acquired by a mobile mapping system. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Antalya, Turkey, 11–13 November 2013. [Google Scholar]
- Hebel, M.; Arens, M.; Stilla, U. Change detection in urban areas by direct comparison of multi-view and multi-temporal ALS data. In Proceedings of the Photogrammetric Image Analysis—ISPRS Conference, PIA 2011, Munich, Germany, 5–7 October 2011; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Xiao, W.; Vallet, B.; Brédif, M.; Paparoditis, N. Street environment change detection from mobile laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2015, 107, 38–49. [Google Scholar] [CrossRef]
- Schutz, C.L.; Hugli, H. Change detection in range imaging for 3D scene segmentation. In Proceedings of the SPIE 2786, Vision Systems: Applications, Besancon, France, 21 August 1996; Panayotis, A.K., Nickolay, B., Eds.; SPIE: Bellingham, WA, USA, 1996. [Google Scholar]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef] [Green Version]
- China and National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Sciences. Available online: http://vision.ia.ac.cn/data (accessed on 10 October 2019).
- Yu, Y.; Guan, H.; Zai, D.; Ji, Z. Rotation-and-scale-invariant airplane detection in high-resolution satellite images based on deep-Hough-forests. ISPRS J. Photogramm. Remote Sens. 2016, 112, 50–64. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Registration Error σ(m) | Completeness (%) | Correctness (%) | Auality (%) | F1 (%) |
|---|---|---|---|---|
| 0.048 | 95.78 | 93.71 | 90.01 | 94.74 |
| 0.055 | 95.74 | 84.19 | 81.15 | 89.60 |
| 0.062 | 95.74 | 74.64 | 72.22 | 83.88 |
| 0.069 | 95.58 | 62.73 | 60.96 | 75.75 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Li, D.; Wang, M.; Wang, Z. 3D Change Detection Using Adaptive Thresholds Based on Local Point Cloud Density. ISPRS Int. J. Geo-Inf. 2021, 10, 127. https://doi.org/10.3390/ijgi10030127
Liu D, Li D, Wang M, Wang Z. 3D Change Detection Using Adaptive Thresholds Based on Local Point Cloud Density. ISPRS International Journal of Geo-Information. 2021; 10(3):127. https://doi.org/10.3390/ijgi10030127
Chicago/Turabian StyleLiu, Dan, Dajun Li, Meizhen Wang, and Zhiming Wang. 2021. "3D Change Detection Using Adaptive Thresholds Based on Local Point Cloud Density" ISPRS International Journal of Geo-Information 10, no. 3: 127. https://doi.org/10.3390/ijgi10030127
APA StyleLiu, D., Li, D., Wang, M., & Wang, Z. (2021). 3D Change Detection Using Adaptive Thresholds Based on Local Point Cloud Density. ISPRS International Journal of Geo-Information, 10(3), 127. https://doi.org/10.3390/ijgi10030127