
An Experimental Study of a New Keypoint Matching Algorithm for Automatic Point Cloud Registration




Abstract
:1. Introduction
2. Materials and Methods
2.1. Datasets Used in the Tests
2.2. Methodology
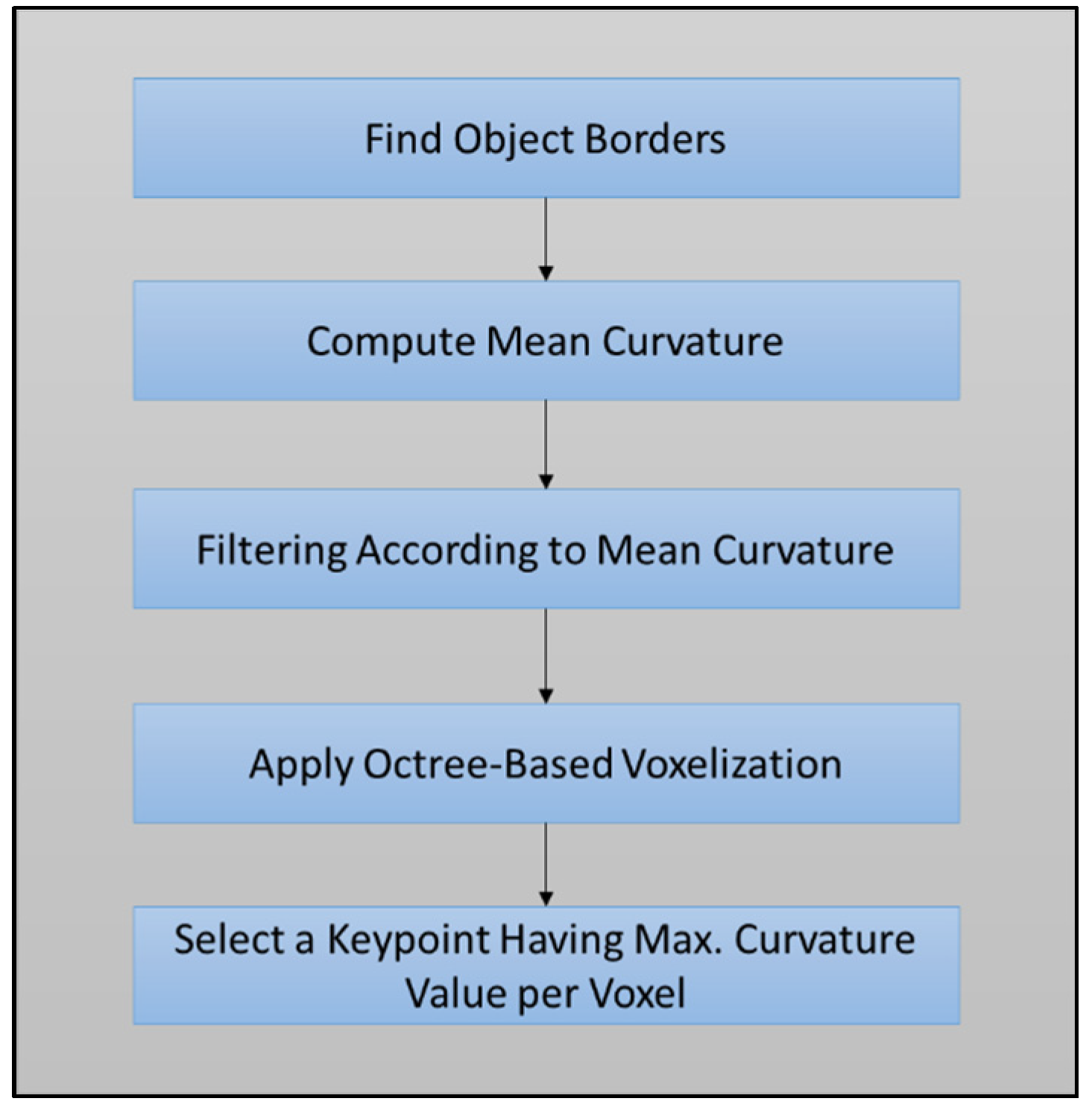
2.2.1. Keypoint Detection
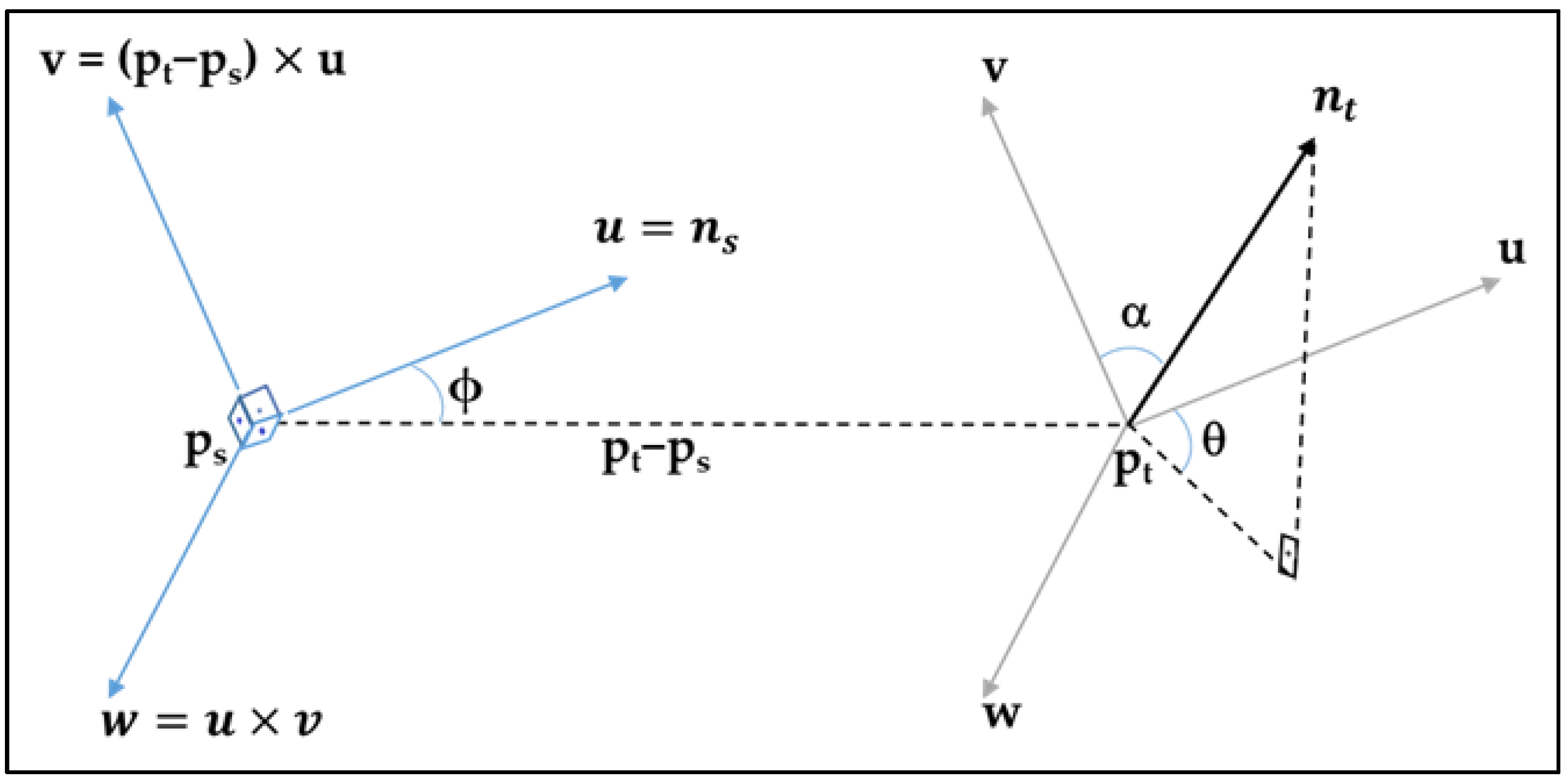
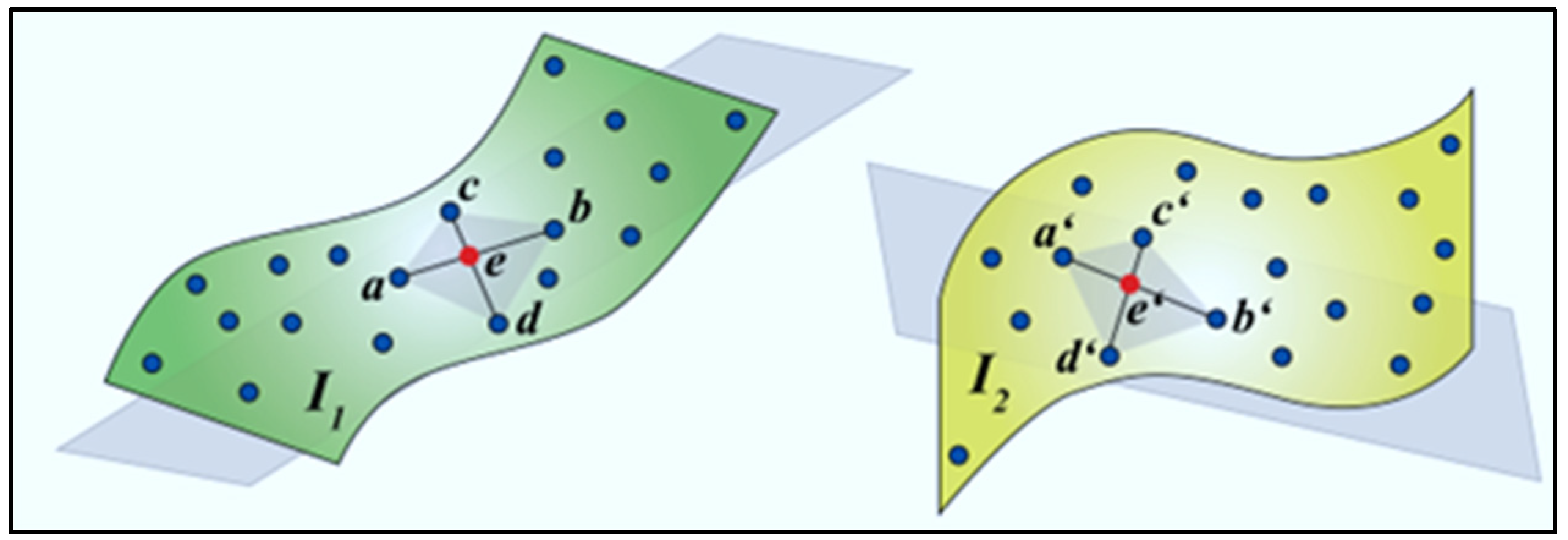
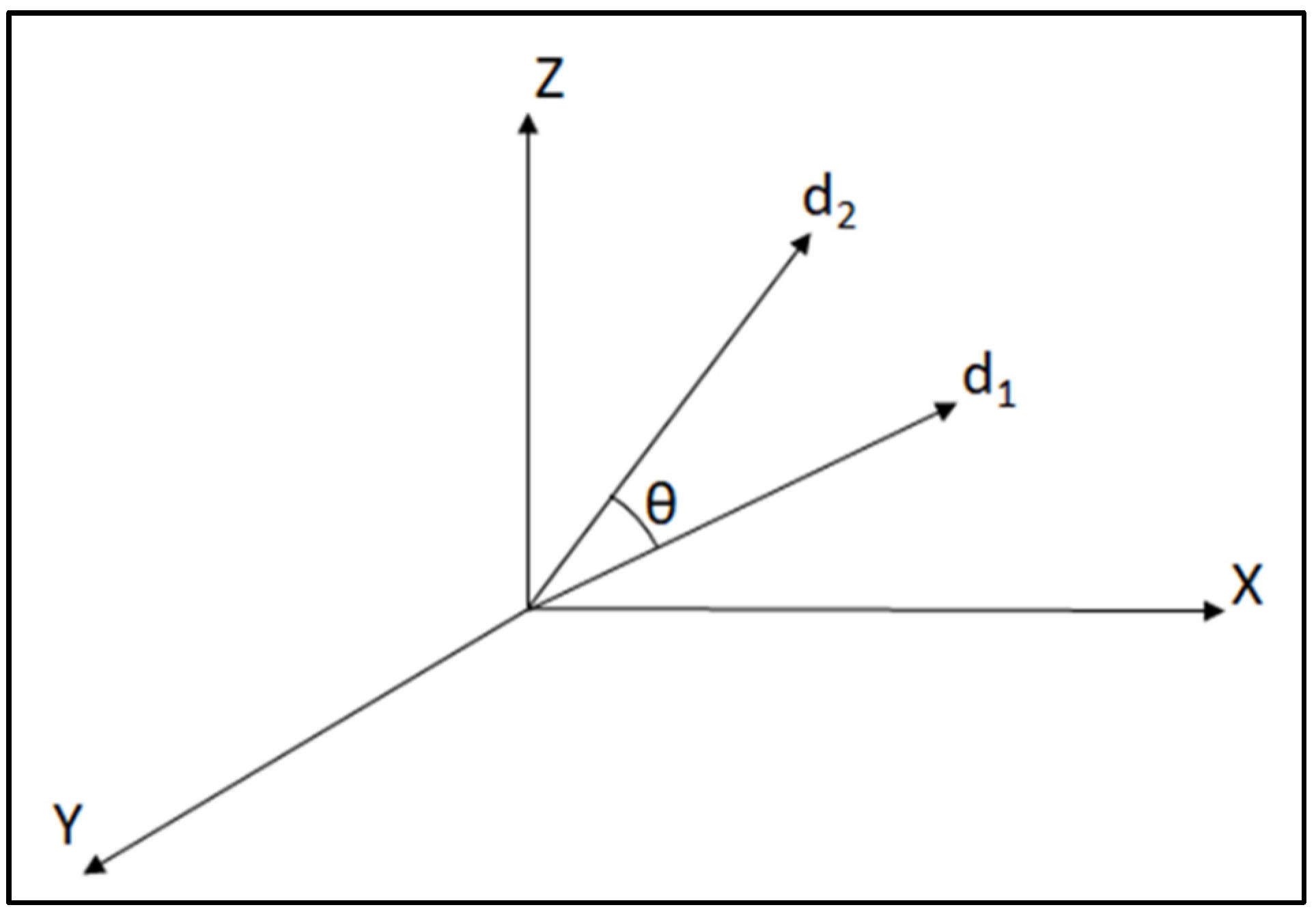
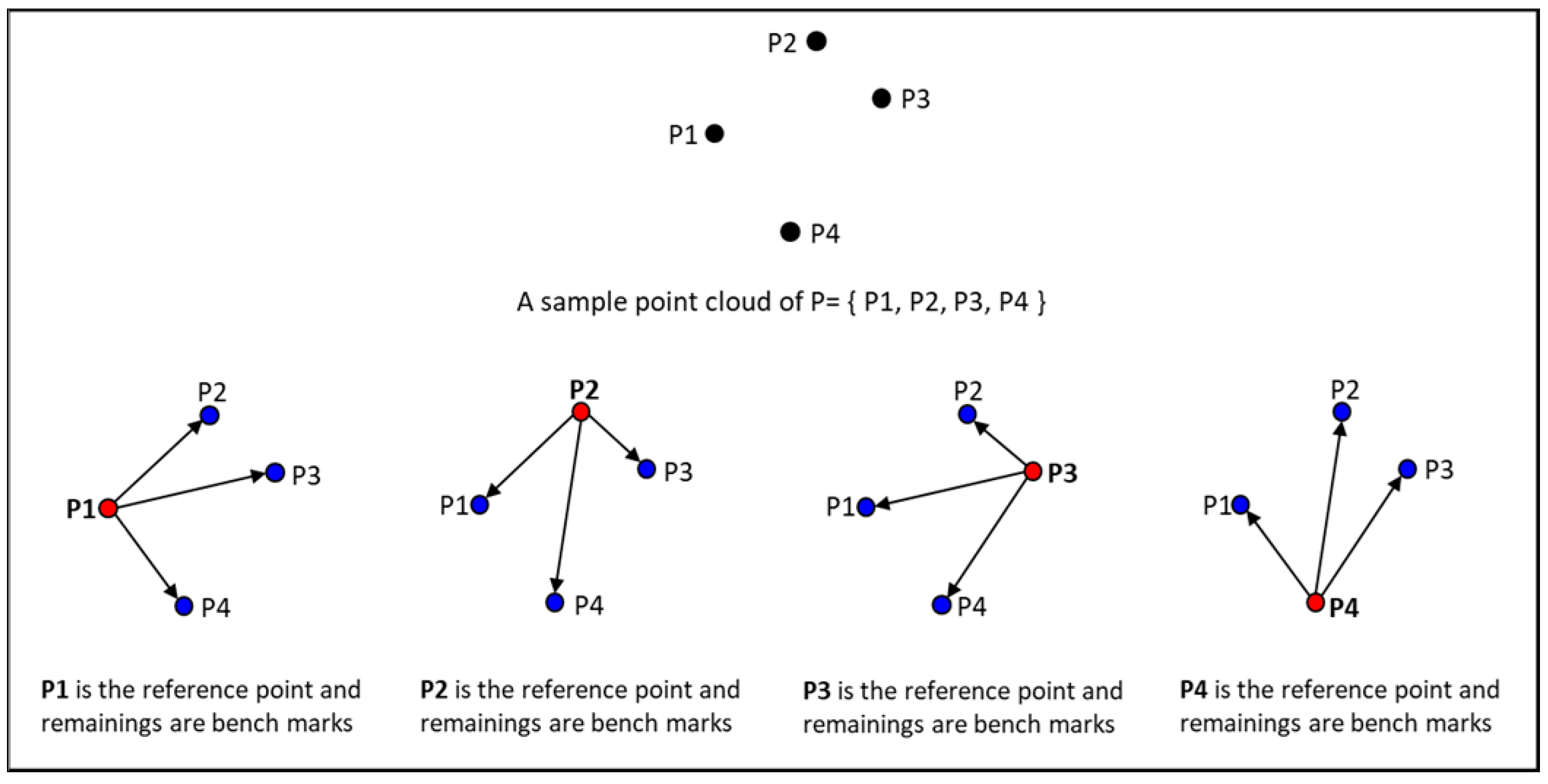
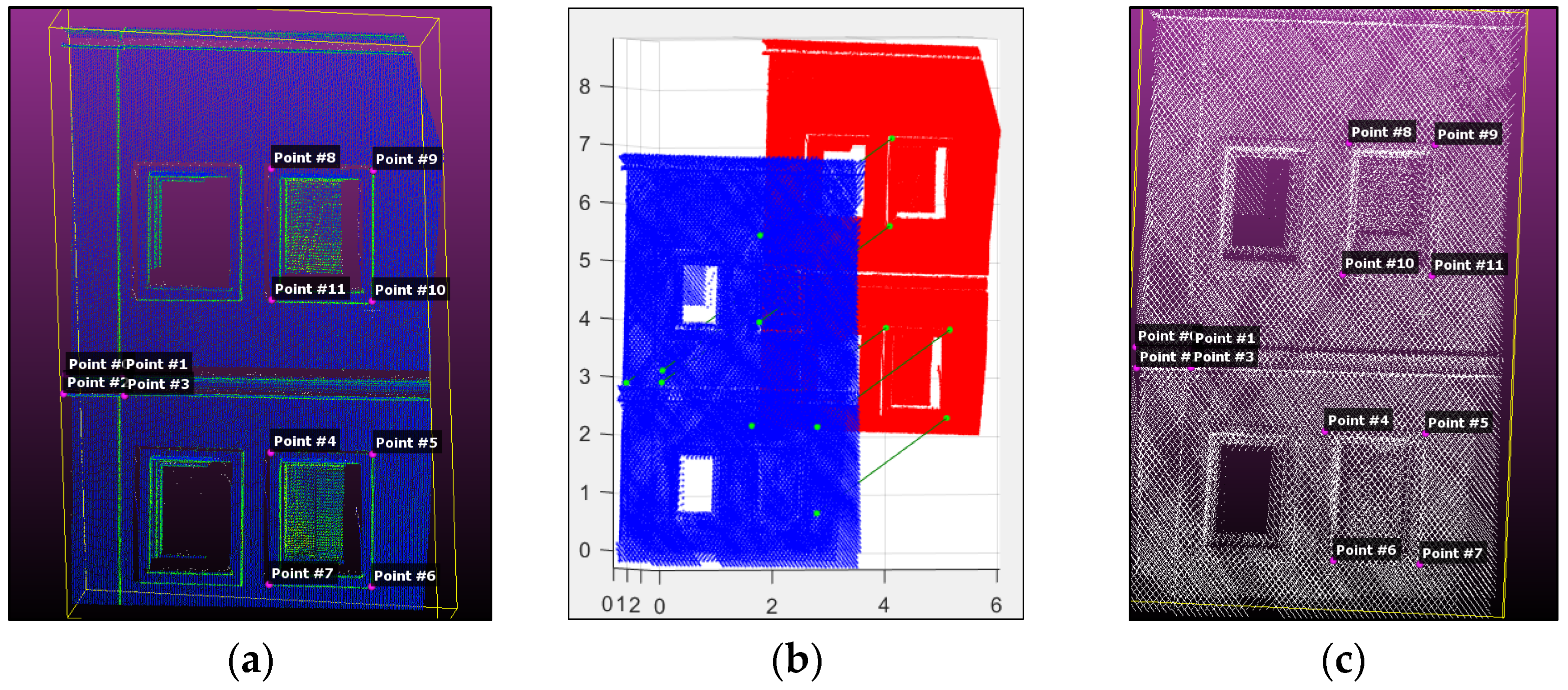
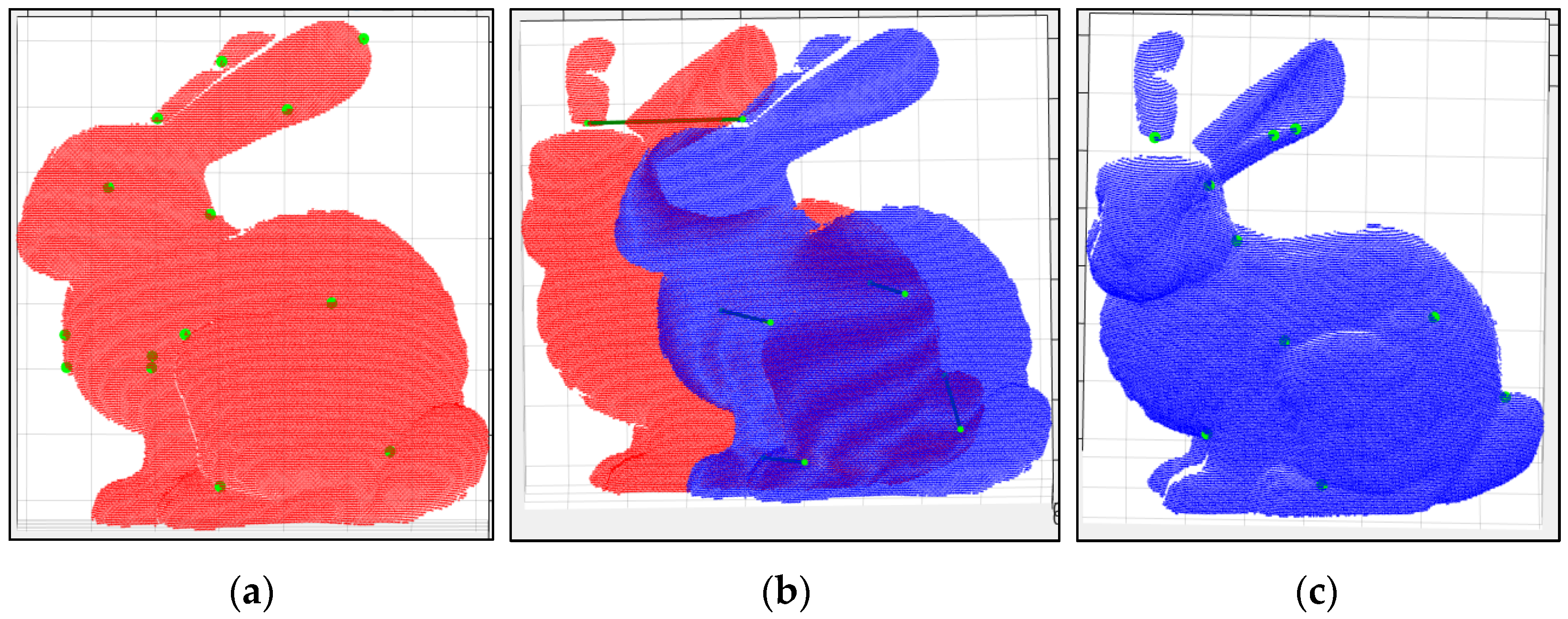
2.2.2. Keypoint Description and Matching
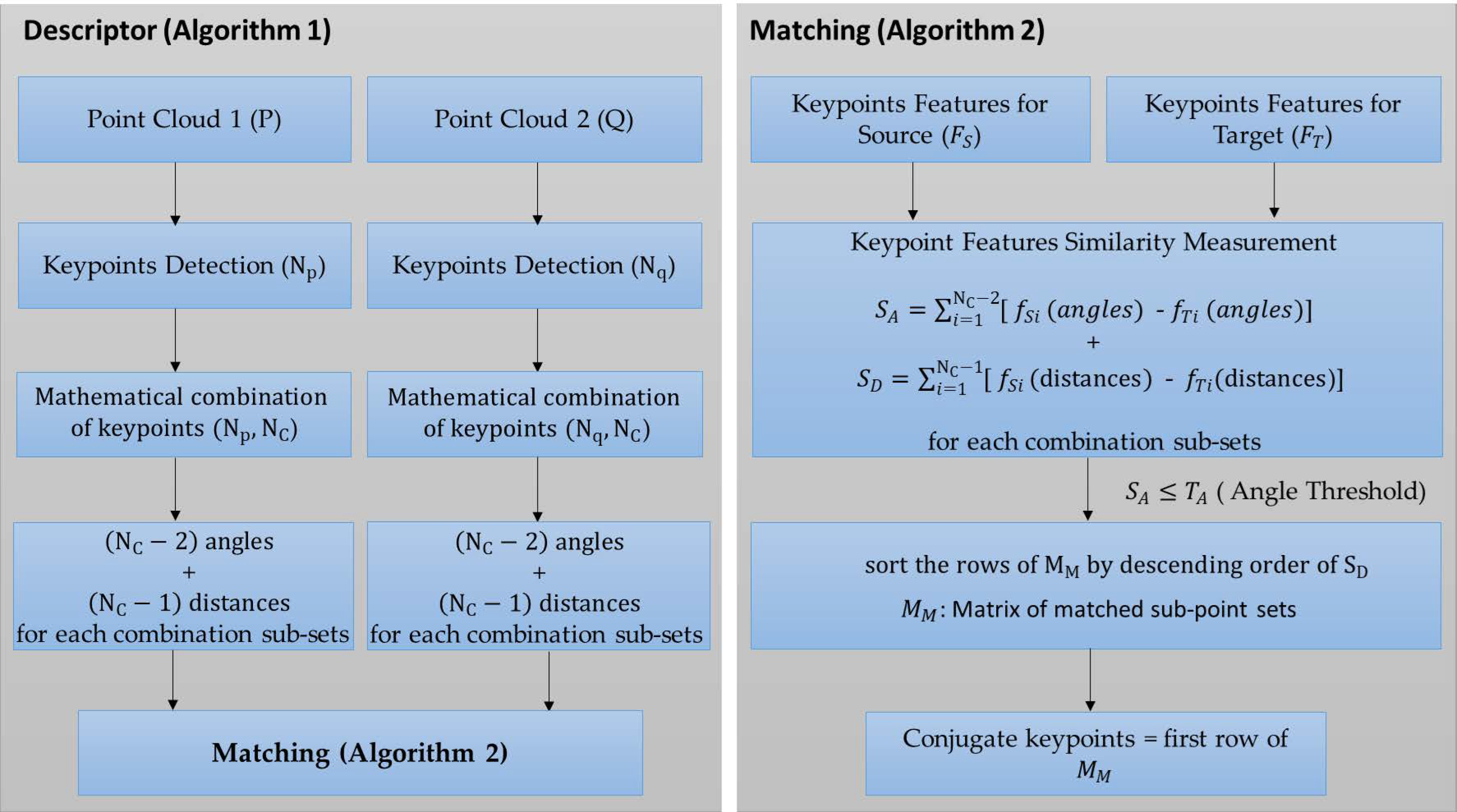
| Algorithm 1. Generation of point cloud features. |
| Input: A point cloud is , number of the sub-points that are going to be selected from the point cloud is . Output: Point cloud feature matrix . 1: 2: 3: 4: 5: for each point combination set in do 6: each point in do 7: 8: 9: 10: 11: 12: 13: end for 14: end for 15: return |
| Algorithm 2. Selection of the subpoint sets from the source and target point clouds for matching. |
| Input: Source and target point clouds are and , number of the sub-points that are going to be selected from the point cloud is , distance threshold for similarity of angle based features is . Output: Matrix storing the information of matched sub-point sets of and . 1: 2: 3: 4: for each feature vector in feature matrix do 5: for each feature vector in feature matrix do 6: 7: 8: 9: 10: 11: 12: end for 13: end for 14: 15: 16: 17: return |
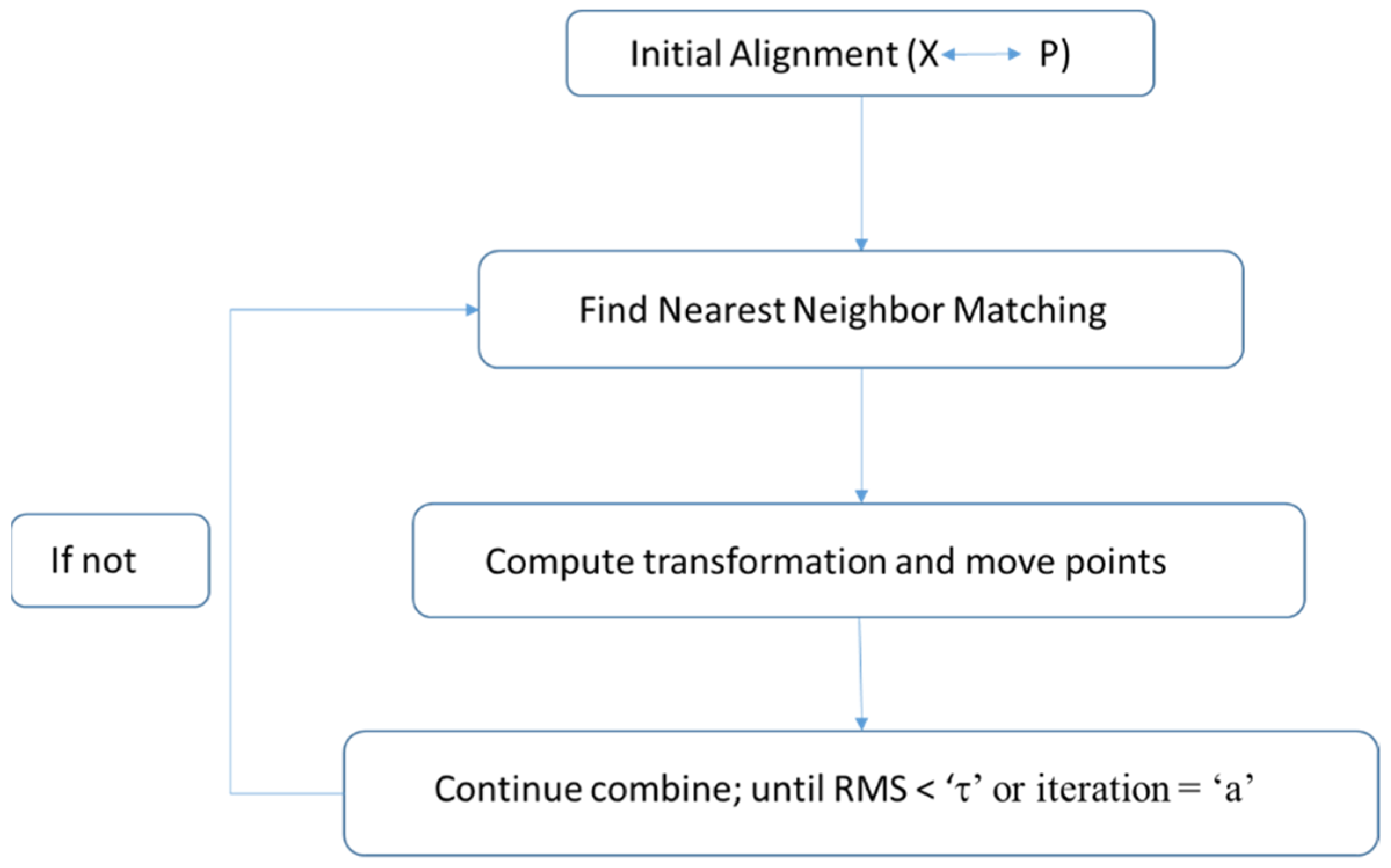
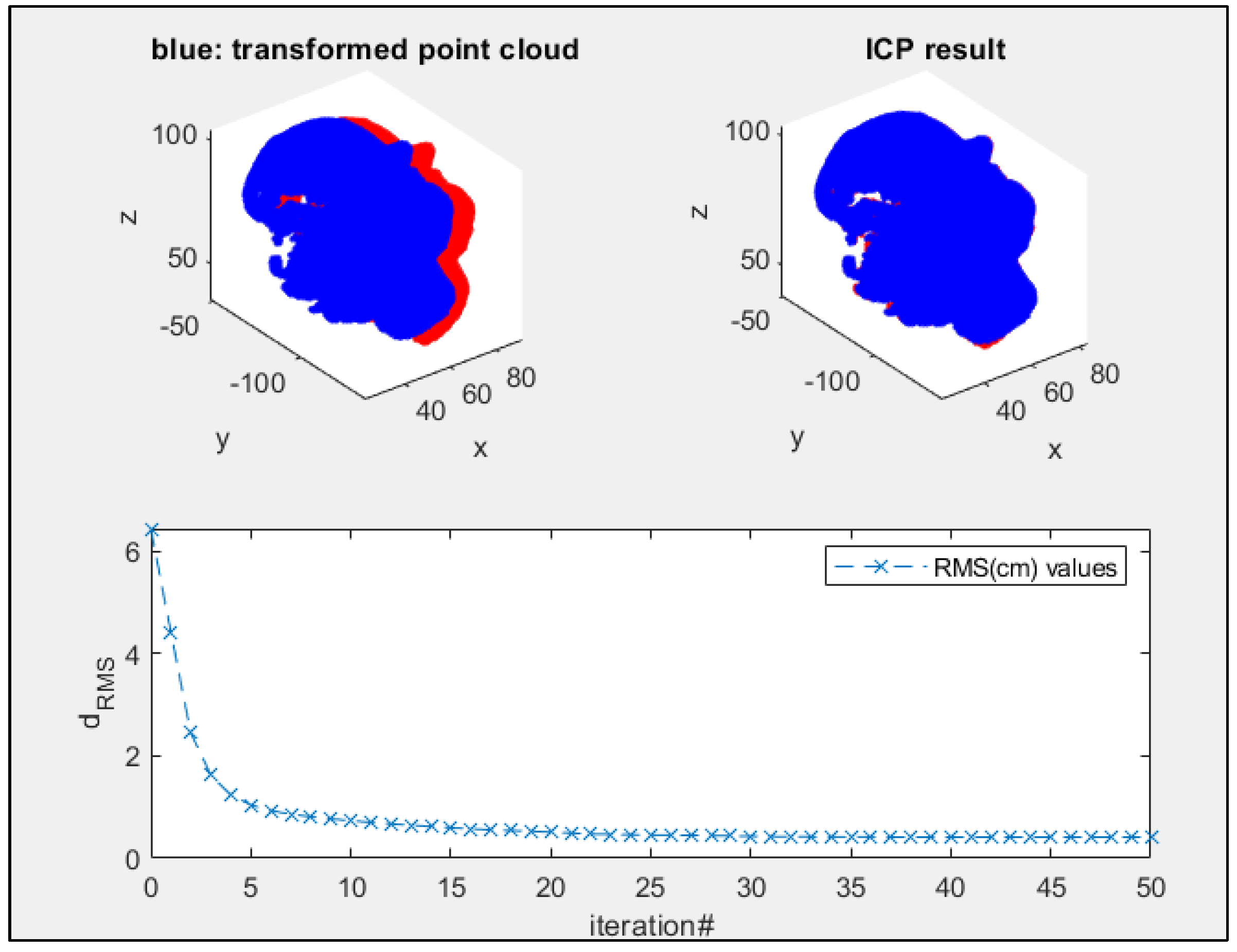
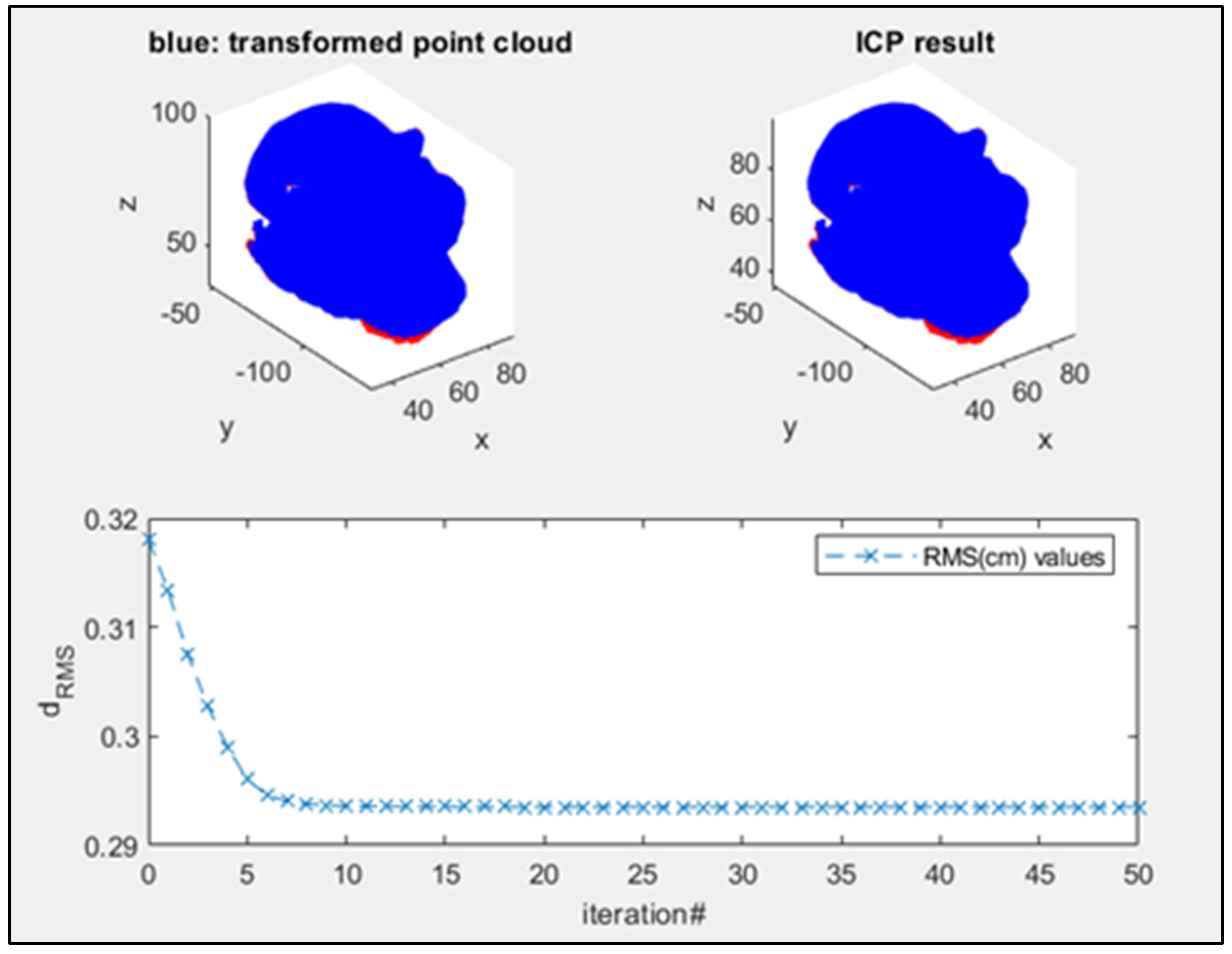
2.2.3. Iterative Closest Point (ICP) Algorithm
3. Results
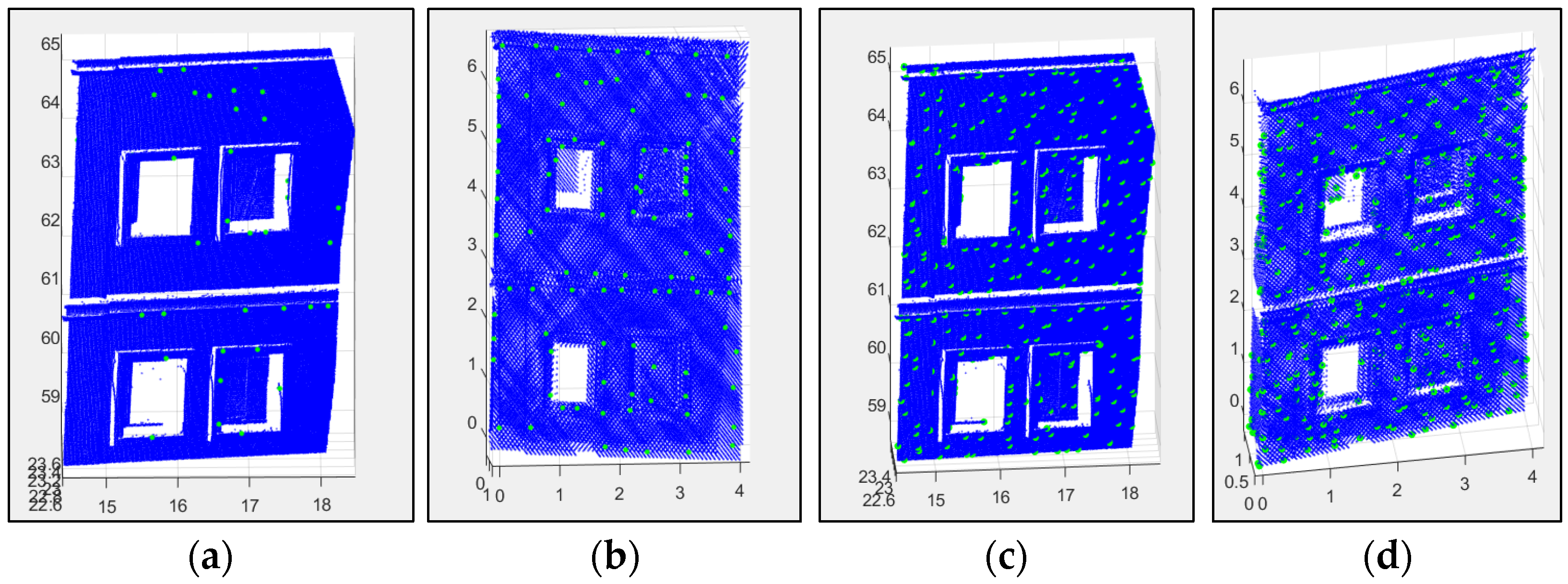
3.1. Performance of the Keypoint Detection Algorithms
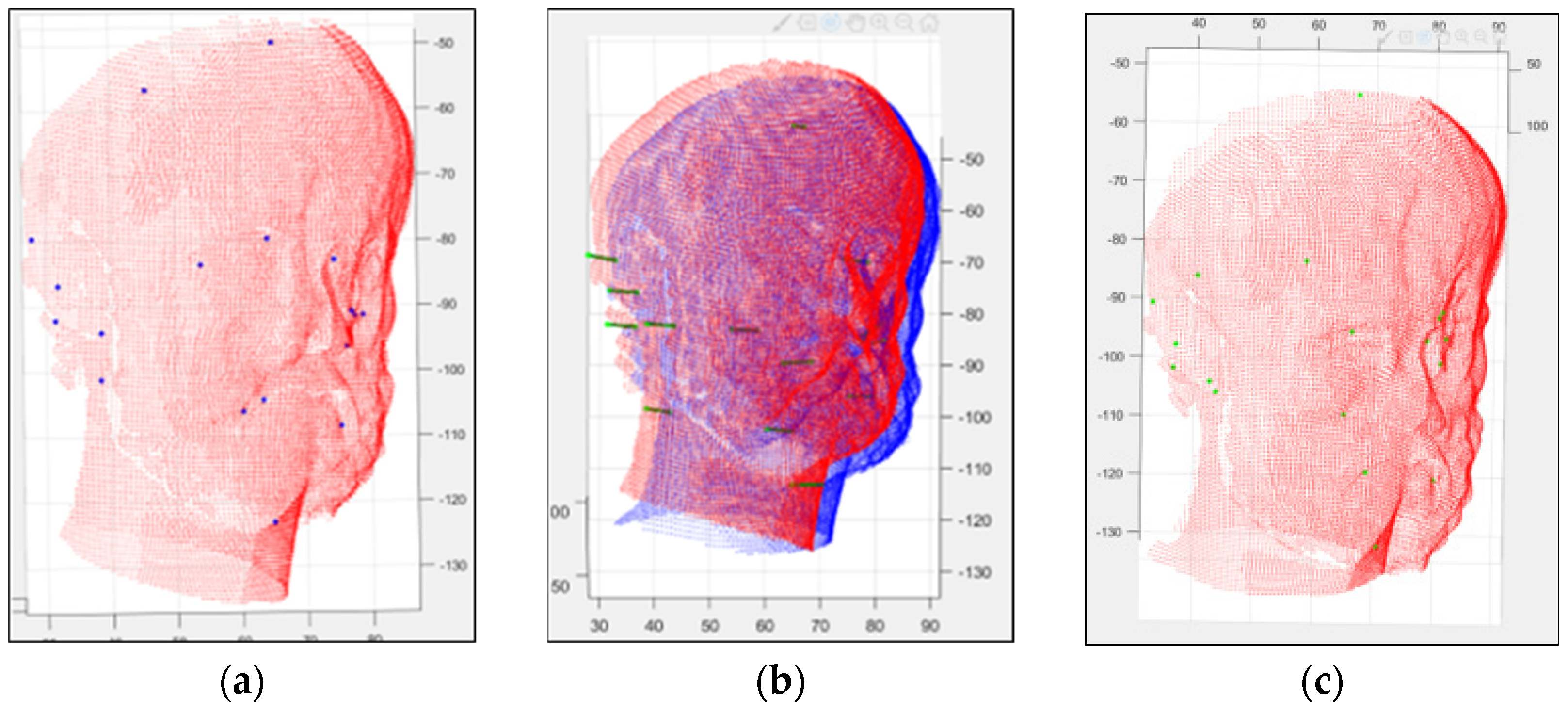
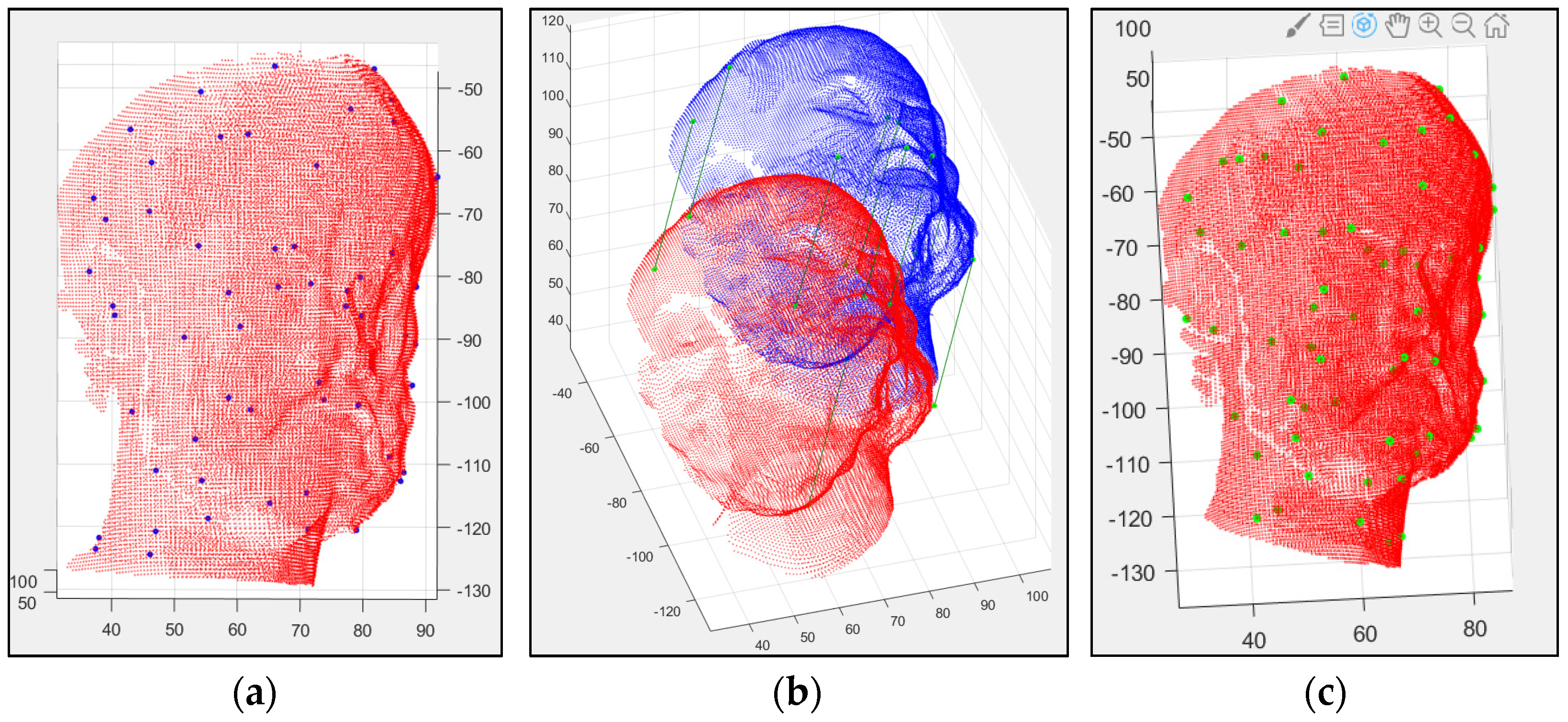
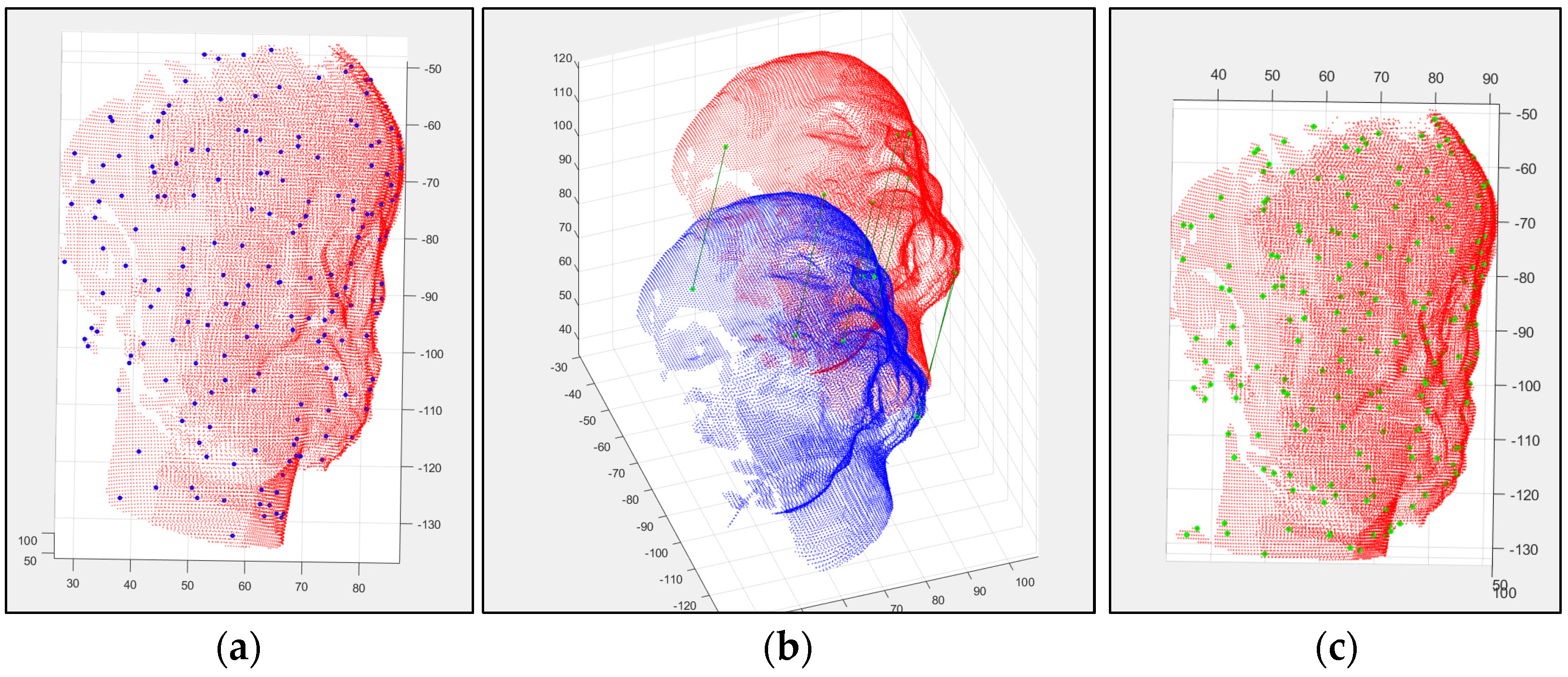
3.2. Performance Tests of Keypoint Descriptor and Matching Algorithms
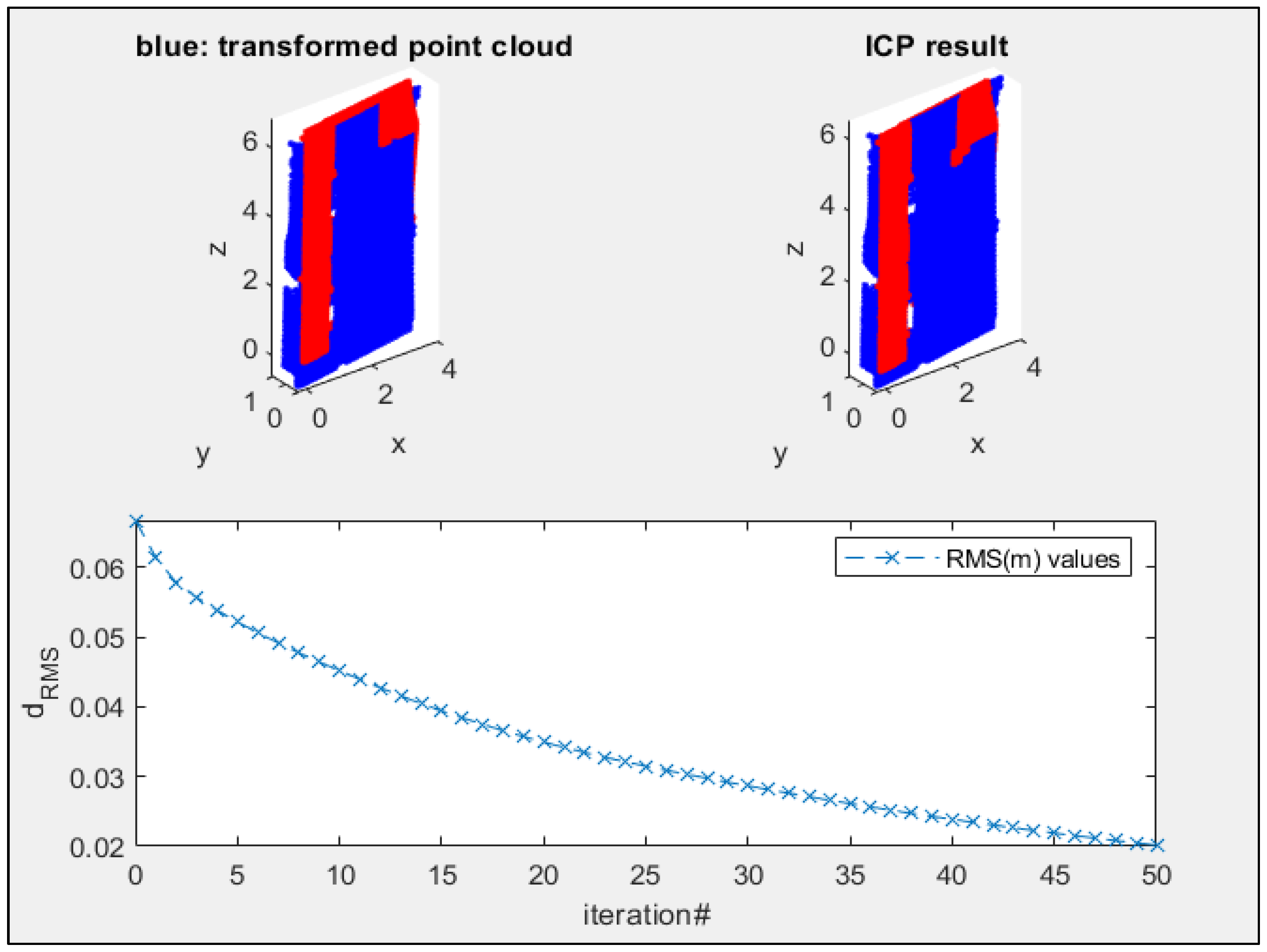
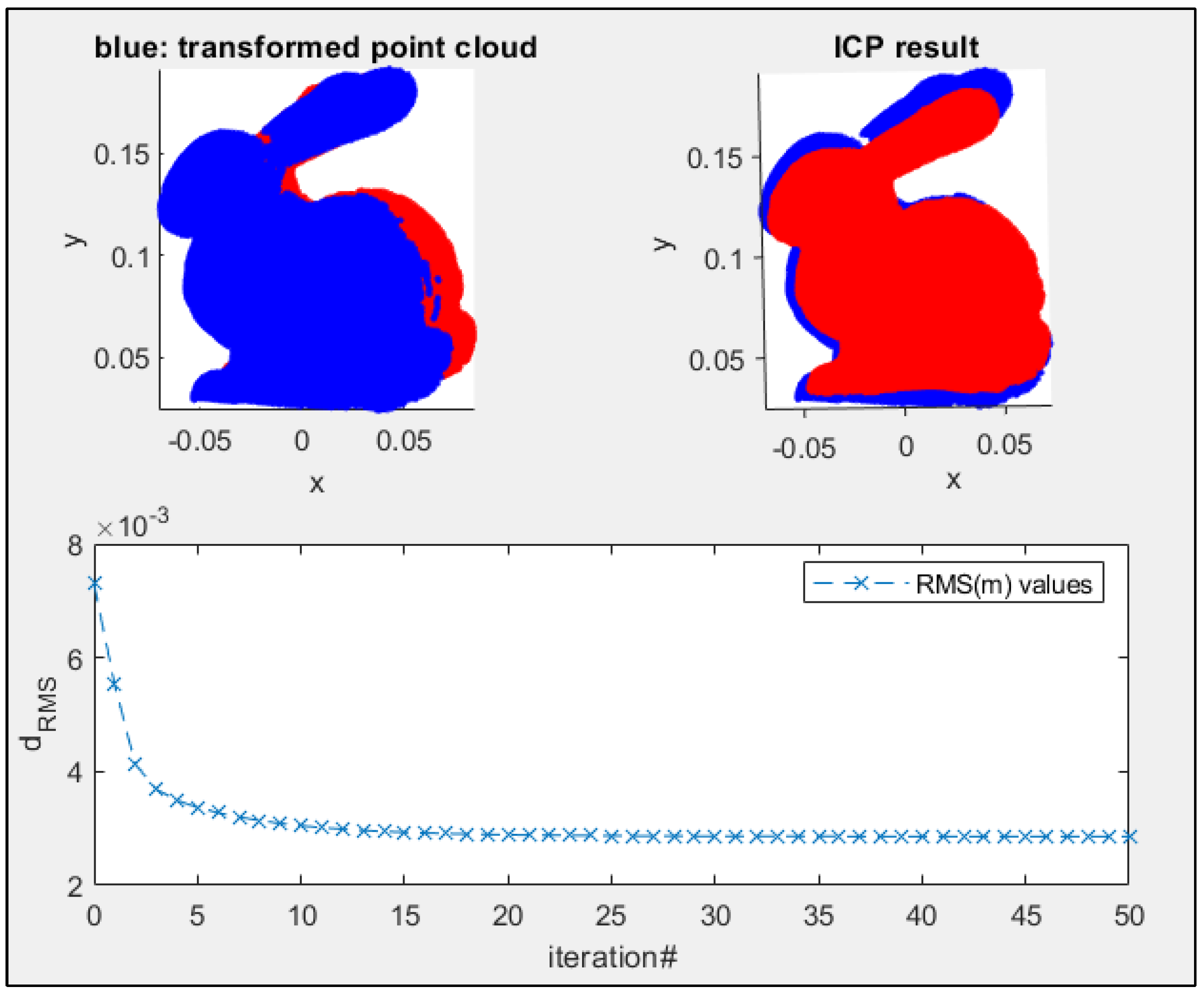
3.3. Numerical Validations of the Applied Algorithms in Fine Registration with the ICP Method
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fangning, H.; Ayman, H. A closed-form solution for coarse registration of point clouds using linear features. J. Surv. Eng. 2016, 142, 04016006. [Google Scholar] [CrossRef]
- Vosselman, G.; Maas, H.G. Airborne and Terrestrial Laser Scanning; CRC Press: Beacon Raton, FL, USA, 2010; pp. 1–318. [Google Scholar]
- Buenoa, M.; González-Jorgea, H.; Martínez-Sánchezac, J.; Lorenzo, H. Automatic point cloud coarse registration using geometric keypoint descriptors for indoor scenes. Autom. Constr. 2017, 81, 134–148. [Google Scholar] [CrossRef]
- Yoshimura, R.; Date, H.; Kanai, S.; Honma, R.; Oda, K.; Ikeda, T. Automatic registration of MLS point clouds and SfM meshes of urban area. Geo-Spat. Inf. Sci. 2016, 19, 171–181. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. In Sensor Fusion IV: Control Paradigms and Data Structures; International Society for Optics and Photonics: Bellingham, WA, USA, 1992. [Google Scholar]
- Rusinkiewicz, S.; Levoy, M. Efficient variants of the ICP algorithm. In Proceedings of the Third International Conference on 3-D Digital Imaging and Modeling, Quebec, QC, Canada, 28 May–1 June 2001. [Google Scholar]
- Aoki, Y.; Goforth, H.; Srivatsan, R.A.; Lucey, S. PointNetLK: Robust & efficient point cloud registration using pointnet. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 7163–7172. [Google Scholar]
- Habib, A.F.; Alruzouq, R.I. Line-based modified iterated Hough transform for automatic registration of multi-source imagery. Photogramm. Rec. 2004, 19, 5–21. [Google Scholar] [CrossRef]
- Chen, S.; Nan, L.; Xia, R.; Zhao, J.; Wonka, P. PLADE: A Plane-Based Descriptor for Point Cloud Registration with Small Overlap. IEEE Trans. Geosci. Remote Sens. 2019, 58, 2530–2540. [Google Scholar] [CrossRef]
- Habib, A.; Detchev, I.; Bang, K. A comparative analysis of two approaches for multiple-surface registration of irregular point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 1–6. [Google Scholar]
- Hassaballah, M.; Abdelmgeid, A.A.; Alshazly, H.A. Image features detection, description and matching. In Image Feature Detectors and Descriptors; Awad, A., Hassaballah, M., Eds.; Springer: Cham, Switzerland, 2016; pp. 11–45. [Google Scholar]
- Xu, Y.; Boerner, R.; Yao, W.; Hoegner, L.; Stilla, U. Pairwise coarse registration of point clouds in urban scenes using voxel-based 4-planes congruent sets. ISPRS J. Photogramm. Remote Sens. 2019, 151, 106–123. [Google Scholar] [CrossRef]
- Aiger, D.; Mitra, N.J.; Cohen-Or, D. 4-points congruent sets for robust pairwise surface registration. ACM Trans. Graphics 2008, 27, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast point feature histograms (FPFH) for 3D registration. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Tombari, F.; Salti, S.; Di Stefano, L. Unique Signatures of Histograms for Local Surface Description. In European Conference on Computer Vision; Daniilidis, K., Maragos, P., Paragios, N., Eds.; Springer: Berlin, Germany, 2010. [Google Scholar]
- Yang, B.; Dong, Z.; Liang, F.; Liu, Y. Automatic registration of large-scale urban scene point clouds based on semantic feature points. ISPRS J. Photogramm. Remote Sens. 2016, 113, 43–58. [Google Scholar] [CrossRef]
- Ge, X. Automatic markerless registration of point clouds with semantic-keypointbased 4-points congruent sets. ISPRS J. Photogramm. Remote Sens. 2017, 130, 344–357. [Google Scholar] [CrossRef] [Green Version]
- Huang, R.; Xu, Y.; Yao, W.; Hoegner, L.; Stilla, U. Robust global registration of point clouds by closed-form solution in the frequency domain. ISPRS J. Photogramm. Remote Sens. 2021, 171, 310–329. [Google Scholar] [CrossRef]
- Förstner, W. A framework for low level feature extraction. In European Conference on Computer Vision; Eklundh, J.O., Ed.; Springer: Berlin, Germany, 1994. [Google Scholar]
- Sipiran, I.; Bustos, B. Harris 3D: A robust extension of the Harris operator for interest point detection on 3D meshes. Vis. Comput. 2011, 27, 963–976. [Google Scholar] [CrossRef]
- Chen, H.; Bhanu, B. 3D free-form object recognition in range images using local surface patches. Pattern Recognit. Lett 2007, 28, 1252–1262. [Google Scholar] [CrossRef]
- Steder, B.; Rusu, R.B.; Konolige, K.; Burgard, W. Point feature extraction on 3D range scans taking into account object boundaries. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Lowe, G. SIFT-the scale invariant feature transform. Int. J. Comput. Vis. 2004, 2, 91–110. [Google Scholar] [CrossRef]
- Rusu, R.B.; Cousins, S. 3D is here: Point cloud library (PCL). In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Zhong, Y. Intrinsic shape signatures: A shape descriptor for 3D object recognition. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision Workshops, ICCV Workshops, Kyoto, Japan, 27 September–4 October 2009. [Google Scholar]
- Habib, A.; Ghanma, M.; Morgan, M.; Al-Ruzouq, R. Photogrammetric and lidar data registration using linear features. Photogram. Eng. Remote Sens. 2005, 71, 699–707. [Google Scholar] [CrossRef]
- Yang, B.; Zang, Y. Automated registration of dense terrestrial laser-scanning point clouds using curves. ISPRS J. Photogram. Remote Sens. 2014, 95, 109–121. [Google Scholar] [CrossRef]
- Ge, X.; Wunderlich, T. Surface-based matching of 3D point clouds with variable coordinates in source and target system. ISPRS J. Photogram. Remote Sens. 2016, 111, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Magnusson, M.; Lilienthal, A.; Duckett, T. Scan registration for autonomous mining vehicles using 3D-NDT. J. Field Robot. 2007, 24, 803–827. [Google Scholar] [CrossRef] [Green Version]
- Huang, R.; Ye, Z.; Boerner, R.; Yao, W.; Xu, Y.; Stilla, U. Fast pairwise coarse registration between point clouds of construction sites using 2D projection based phase correlation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 1015–1020. [Google Scholar] [CrossRef] [Green Version]
- Nextengine-Next Engine 3D Laser Scanner Ultra HD Handbook. Available online: https://www.nextengine.com/assets/pdf/scanner-techspecs-uhd.pdf (accessed on 1 December 2020).
- Leica, Leica ScanStation C10–the All-in-One Laser Scanner for Any Application. Available online: http://w3.leica-geosystems.com/downloads123/hds/hds/scanstationc10/brochures-datasheet/leica_scanstation_c10_ds_en.pdf (accessed on 1 December 2020).
- Riegl, Riegl VMX-450 Compact Mobile Laser Scanning System Data Sheet. Available online: http://www.riegl.com/uploads/tx_pxpriegldownloads/DataSheet_VMX-450_2015-03-19.pdf (accessed on 1 December 2020).
- Tombari, F.; Salti, S.; Di Stefano, L. Performance evaluation of 3D keypoint detectors. Int. J. Comput. Vis. 2013, 102, 198–220. [Google Scholar] [CrossRef]
- Pauly, M.; Gross, M.; Kobbelt, L.P. Efficient simplification of point-sampled surfaces. In Proceedings of the IEEE Visualization. VIS 2002, Boston, MA, USA, 27 October–1 November 2002. [Google Scholar]
- Qin, H.; Guan, G.; Yu, Y.; Zhong, L. A voxel-based filtering algorithm for mobile LiDAR data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 1433–1438. [Google Scholar] [CrossRef] [Green Version]
- Rusu, R.B.; Marton, Z.C.; Blodow, N.; Beetz, M. Persistent point feature histograms for 3D point clouds. In Proceeding of the 10th International Conference International Autonomous Systems (IAS-10), Baden, Germany, 23–25 July 2008; pp. 119–128. [Google Scholar]
- Hänsch, R.; Weber, T.; Hellwich, O. Comparison of 3D interest point detectors and descriptors for point cloud fusion. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 1–57. [Google Scholar] [CrossRef] [Green Version]
- Novak, D.; Schindler, K. Approximate registration of point clouds with large scale differences. ISPRS Ann. Photogramm. Remote Sens Spat. Inf. Sci. 2013, 1, 211–216. [Google Scholar] [CrossRef] [Green Version]
- Theiler, P.W.; Wegner, J.D.; Schindler, K. Markerless point cloud registration with keypoint-based 4-points congruent sets. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 1, 283–288. [Google Scholar] [CrossRef] [Green Version]
- Gressin, A.; Mallet, C.; David, N. Improving 3D lidar point cloud registration using optimal neighborhood knowledge. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Melbourne, Australia, 25 August–1 September 2012; pp. 111–116. [Google Scholar]
- Al-Durgham, K.; Habib, A. Association-matrix-based sample consensus approach for automated registration of terrestrial laser scans using linear features. Photogramm. Eng. Remote Sens. 2014, 80, 1029–1039. [Google Scholar] [CrossRef]
- Matabosch, C.; Salvi, J.; Fofi, D.; Meriaudeau, F. Range image registration for industrial inspection. In Proceedings of the Machine Vision Applications in Industrial Inspection XIII, International Society for Optics and Photonics, San Jose, CA, USA, 24 February 2005. [Google Scholar]
- Al-Rawabdeh, A.; He, F.; Moussa, A.; El-Sheimy, N.; Habib, A. Using an unmanned aerial vehicle-based digital imaging system to derive a 3D point cloud for landslide scarp recognition. Remote Sens. 2016, 8, 95. [Google Scholar] [CrossRef] [Green Version]
- Watson, G. Computing helmert transformations. J. Comput. Appl. Math. 2006, 197, 387–394. [Google Scholar] [CrossRef] [Green Version]
- Ghilani, C.D. Adjustment Computations: Spatial Data Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Boukebbab, S.; Gheribi, H.; Linares, J.M. A procedure for total knee alignment prosthesis using the ICP algorithm in the aim to implant it in the biomechanical engineering. Vibroeng. Proc. 2016, 9, 44–49. [Google Scholar]
- Zhang, Z. On local matching of free-form curves. In BMVC92; Hogg, D., Boyle, R., Eds.; Springer: London, UK, 1992; pp. 347–356. [Google Scholar] [CrossRef]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes in C, 2nd ed.; Cambridge University Press: London, UK, 2002; pp. 59–70. [Google Scholar]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Fitzgibbon, A.W. Robust registration of 2D and 3D point sets. Image Vis. Comput. 2003, 21, 1145–1153. [Google Scholar] [CrossRef]
- Yew, Z.J.; Lee, G.H. 3dfeat-net: Weakly supervised local 3D features for point cloud registration. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Kjer, H.M.; Wilm, J. Evaluation of Surface Registration Algorithms for PET Motion Correction. Bachelor′s Thesis, Technical University of Denmark, Lyngby, Denmark, 2010. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Gauss-Markov | RMSE mx | Gauss-Markov | RMSE mx |
|---|---|---|---|---|
| mo (cm) | 0.2417 | 0.1746 | ||
| (cm) | −5.2107 | 0.5858 | −4.8035 | 0.2615 |
| (cm) | −0.1793 | 0.6005 | 0.1262 | 0.2628 |
| (cm) | 1.3704 | 0.4864 | 1.3367 | 0.2984 |
| s (unitless) | 0.0044 | 0.0033 | 0.0009 | 0.0037 |
| (rad) | 0.0043 | 0.0048 | −0.0057 | 0.0053 |
| (rad) | 0.0020 | 0.0044 | 0.0018 | 0.0021 |
| (rad) | 0.0007 | 0.0040 | −0.0006 | 0.0029 |
| Parameters | Gauss-Markov | RMSE mx | Gauss-Markov | RMSE mx |
|---|---|---|---|---|
| mo (cm) | 0.6500 | 0.3389 | ||
| (cm) | −1.7221 | 2.2380 | −1.8282 | 0.7134 |
| (cm) | −0.8964 | 2.1862 | −3.1901 | 0.6788 |
| (cm) | −2.1867 | 1.8046 | 2.5650 | 0.5924 |
| s (unitless) | 0.0030 | 0.0107 | 0.0373 | 0.0068 |
| (rad) | 0.0247 | 0.0156 | 0.0642 | 0.0094 |
| (rad) | 0.0220 | 0.0143 | 0.0285 | 0.0042 |
| (rad) | 0.0145 | 0.0133 | 0.0319 | 0.0052 |
| Parameters | Gauss-Markov | RMSE mx | Gauss-Markov | RMSE mx |
|---|---|---|---|---|
| mo (cm) | 0.0930 | 0.0550 | ||
| (cm) | 4.4310 | 0.2810 | 4.2760 | 0.1070 |
| (cm) | −0.0490 | 0.3330 | −0.2050 | 0.1070 |
| (cm) | −1.3570 | 0.3060 | −1.2490 | 0.1030 |
| s (unitless) | −0.0020 | 0.0010 | 0.0011 | 0.0010 |
| (rad) | −0.0020 | 0.0020 | 0.0060 | 0.0010 |
| (rad) | −0.0020 | 0.0010 | −0.0040 | 0.0010 |
| (rad) | −0.0040 | 0.0020 | −0.0030 | 0.0010 |
| Parameters | Gauss-Markov | RMSE mx | Gauss-Markov | RMSE mx |
|---|---|---|---|---|
| mo (m) | 0.0207 | 0.0143 | ||
| (m) | −0.1355 | 0.0166 | −0.1245 | 0.0090 |
| (m) | 0.0186 | 0.0241 | 0.0152 | 0.0091 |
| (m) | −0.2893 | 0.0162 | −0.3021 | 0.0097 |
| s (unitless) | -0.0016 | 0.0041 | −0.0063 | 0.0032 |
| (rad) | −0.0017 | 0.0057 | −0.0082 | 0.0044 |
| (rad) | −0.0023 | 0.0042 | −0.0013 | 0.0010 |
| (rad) | −0.0002 | 0.0064 | −0.0021 | 0.0012 |
| Parameters | Gauss-Markov | RMSE mx | Gauss-Markov | RMSE mx |
|---|---|---|---|---|
| mo (m) | 0.0072 | 0.0051 | ||
| (m) | 0.0218 | 0.0077 | 0.0270 | 0.0066 |
| (m) | 0.0092 | 0.0068 | −0.0183 | 0.0058 |
| (m) | 0.0405 | 0.0092 | 0.0426 | 0.0045 |
| s (unitless) | −0.1443 | 0.0550 | 0.0990 | 0.0425 |
| (rad) | −0.0012 | 0.0927 | −0.0072 | 0.0596 |
| (rad) | 0.5441 | 0.0845 | 0.6985 | 0.0687 |
| (rad) | 0.1349 | 0.0609 | 0.0778 | 0.0579 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuçak, R.A.; Erol, S.; Erol, B. An Experimental Study of a New Keypoint Matching Algorithm for Automatic Point Cloud Registration. ISPRS Int. J. Geo-Inf. 2021, 10, 204. https://doi.org/10.3390/ijgi10040204
Kuçak RA, Erol S, Erol B. An Experimental Study of a New Keypoint Matching Algorithm for Automatic Point Cloud Registration. ISPRS International Journal of Geo-Information. 2021; 10(4):204. https://doi.org/10.3390/ijgi10040204
Chicago/Turabian StyleKuçak, Ramazan Alper, Serdar Erol, and Bihter Erol. 2021. "An Experimental Study of a New Keypoint Matching Algorithm for Automatic Point Cloud Registration" ISPRS International Journal of Geo-Information 10, no. 4: 204. https://doi.org/10.3390/ijgi10040204
APA StyleKuçak, R. A., Erol, S., & Erol, B. (2021). An Experimental Study of a New Keypoint Matching Algorithm for Automatic Point Cloud Registration. ISPRS International Journal of Geo-Information, 10(4), 204. https://doi.org/10.3390/ijgi10040204