
Effects of Virtual Reality Locomotion Techniques on Distance Estimations


Abstract
:1. Introduction
2. Background
3. Methods
3.1. Participants
3.2. Materials
3.3. Procedure
3.4. Measures
3.5. Statistics
4. Results
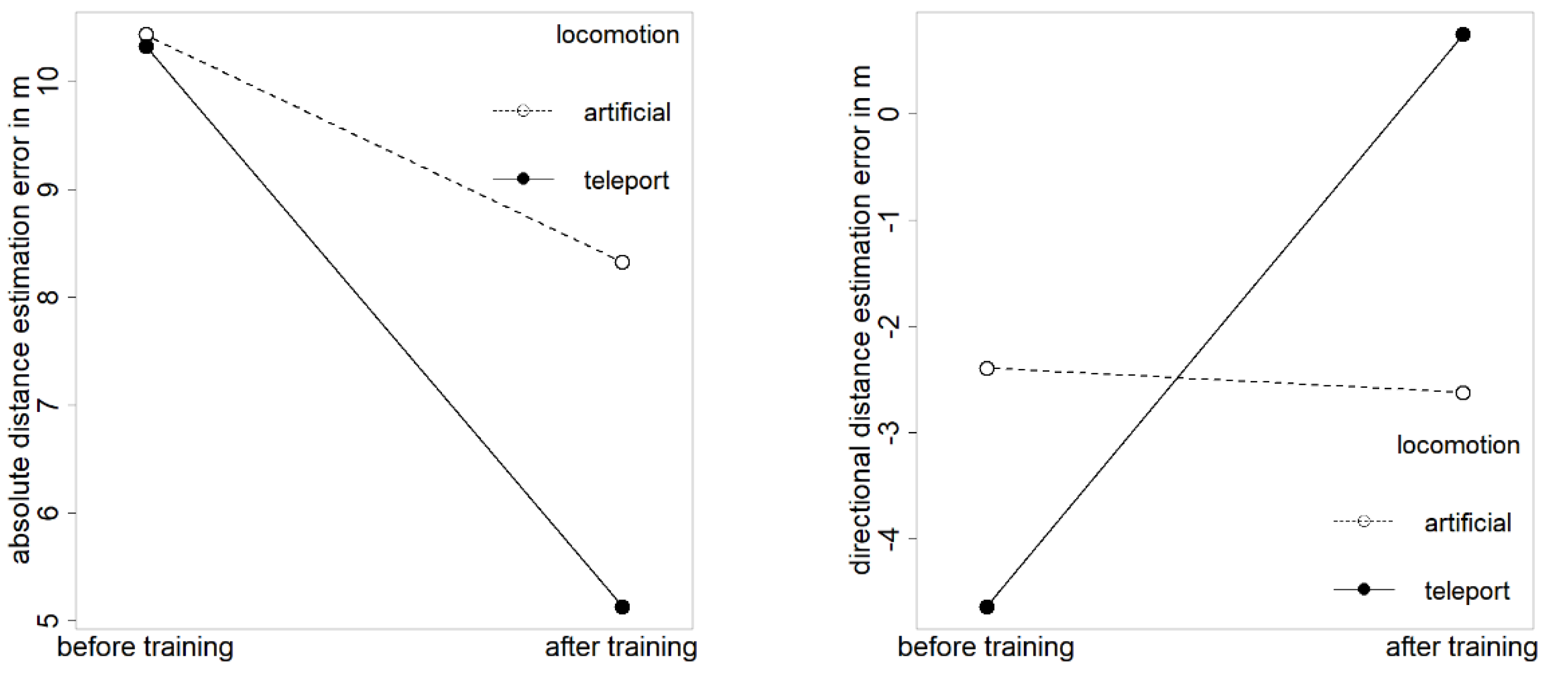
4.1. Effects of Locomotion Technique and Training
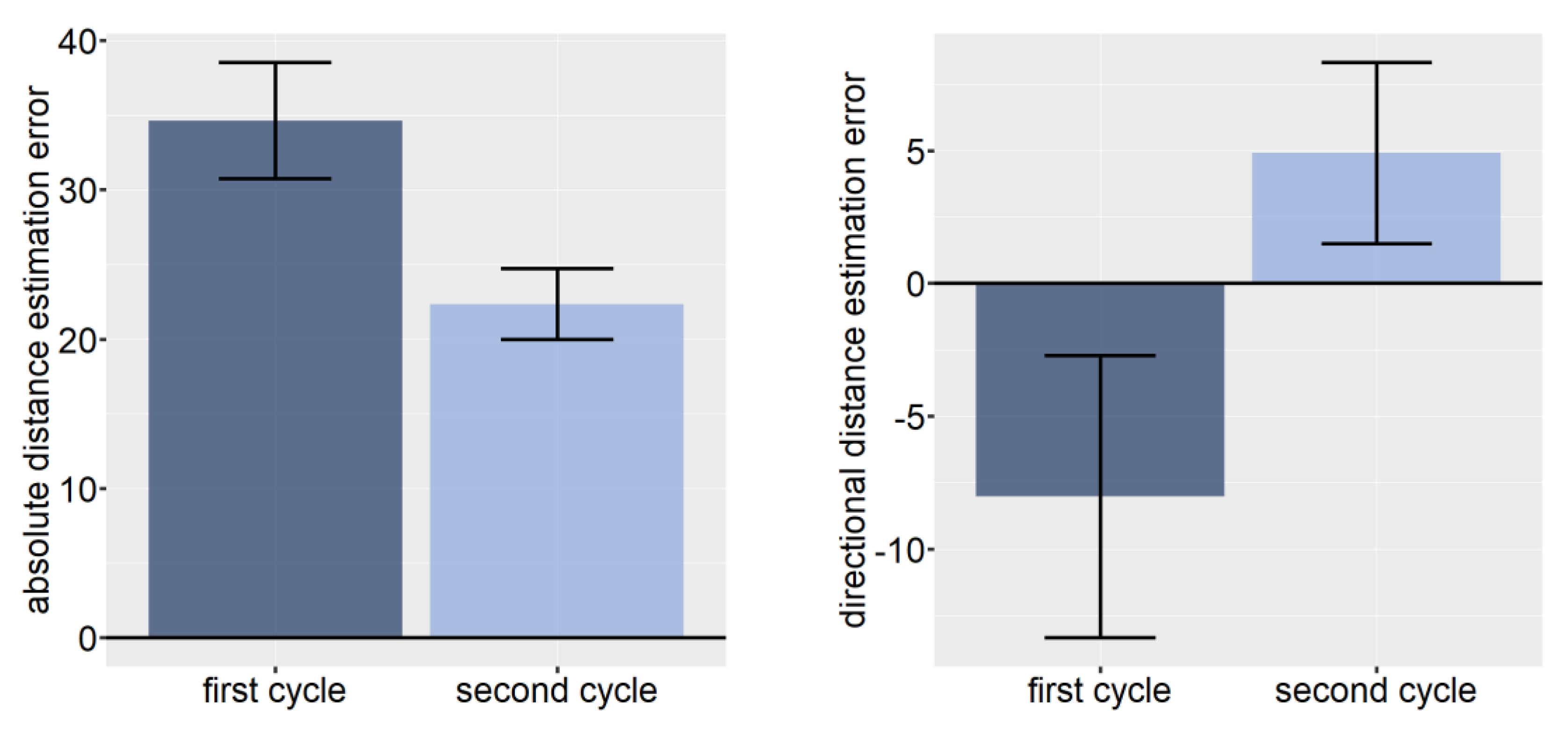
4.2. Skill Transfer Between Locomotion Techniques
5. Discussion
6. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Clarke, K.C.; Johnson, J.M.; Trainor, T. Contemporary American cartographic research: A review and prospective. Cartogr. Geogr. Inf. Sci. 2019, 46, 196–209. [Google Scholar] [CrossRef]
- Çöltekin, A.; Griffin, A.L.; Slingsby, A.; Robinson, A.C.; Christophe, S.; Rautenbach, V.; Chen, M.; Pettit, C.; Klippel, A. Geospatial Information Visualization and Extended Reality Displays. In Manual of Digital Earth; Guo, H., Goodchild, M.F., Annoni, A., Eds.; Springer: Singapore, 2020; pp. 229–277. ISBN 978-981-32-9914-6. [Google Scholar]
- Montello, D.R.; Fabrikant, S.I.; Davies, C. Cognitive perspectives on cartography and other geographic information visualizations. In Handbook of Behavioral and Cognitive Geography; Montello, D., Ed.; Edward Elgar Publishing: Cheltenham, UK, 2018; pp. 177–196. ISBN 9781784717544. [Google Scholar]
- Montello, D.R. Cognitive Map-Design Research in the Twentieth Century: Theoretical and Empirical Approaches. Cartogr. Geogr. Inf. Sci. 2002, 29, 283–304. [Google Scholar] [CrossRef]
- Uttal, D.H.; Wellman, H.M. Young children’s representation of spatial information acquired from maps. Dev. Psychol. 1989, 25, 128–138. [Google Scholar] [CrossRef]
- Münzer, S.; Zimmer, H.D.; Schwalm, M.; Baus, J.; Aslan, I. Computer-assisted navigation and the acquisition of route and survey knowledge. J. Environ. Psychol. 2006, 26, 300–308. [Google Scholar] [CrossRef]
- Dickmann, F.; Edler, D.; Bestgen, A.-K.; Kuchinke, L. Exploiting Illusory Grid Lines for Object-Location Memory Performance in Urban Topographic Maps. Cartogr. J. 2017, 54, 242–253. [Google Scholar] [CrossRef]
- De Cock, L.; Ooms, K.; van de Weghe, N.; Vanhaeren, N.; de Maeyer, P. User Preferences on Route Instruction Types for Mobile Indoor Route Guidance. ISPRS Int. J. Geo-Inf. 2019, 8, 482. [Google Scholar] [CrossRef] [Green Version]
- Lokka, I.E.; Çöltekin, A.; Wiener, J.; Fabrikant, S.I.; Röcke, C. Virtual environments as memory training devices in navigational tasks for older adults. Sci. Rep. 2018, 8, 10809. [Google Scholar] [CrossRef] [PubMed]
- Slater, M.; Linakis, V.; Usoh, M.; Kooper, R. Immersion, Presence, and Performance in Virtual Environments: An Experiment with Tri-Dimensional Chess. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology, VRST’96, Hong Kong, 1–4 July 1996; Green, M., Fairchild, K., Zyda, M., Eds.; ACM Press: New York, NY, USA, 1996; pp. 163–172, ISBN 0897918258. [Google Scholar]
- Slater, M. Immersion and the illusion of presence in virtual reality. Br. J. Psychol. 2018, 109, 431–433. [Google Scholar] [CrossRef]
- Hruby, F.; Ressl, R.; de La Borbolla del Valle, G. Geovisualization with immersive virtual environments in theory and practice. Int. J. Digit. Earth 2019, 12, 123–136. [Google Scholar] [CrossRef] [Green Version]
- Edler, D.; Husar, A.; Keil, J.; Vetter, M.; Dickmann, F. Virtual Reality (VR) and Open Source Software: A Workflow for Constructing an Interactive Cartographic VR Environment to Explore Urban Landscapes. KN J. Cartogr. Geogr. Inf. 2018, 68, 5–13. [Google Scholar] [CrossRef]
- Edler, D.; Keil, J.; Wiedenlübbert, T.; Sossna, M.; Kühne, O.; Dickmann, F. Immersive VR Experience of Redeveloped Post-industrial Sites: The Example of “Zeche Holland” in Bochum-Wattenscheid. KN J. Cartogr. Geogr. Inf. 2019, 69, 267–284. [Google Scholar] [CrossRef] [Green Version]
- Keil, J.; Edler, D.; Schmitt, T.; Dickmann, F. Creating Immersive Virtual Environments Based on Open Geospatial Data and Game Engines. J. Cartogr. Geogr. Inf. 2021, 1–13. [Google Scholar] [CrossRef]
- Çöltekin, A.; Oprean, D.; Wallgrün, J.O.; Klippel, A. Where are we now? Re-visiting the Digital Earth through human-centered virtual and augmented reality geovisualization environments: Re-visiting the Digital Earth through human-centered virtual and augmented reality geovisualization environments. Int. J. Digit. Earth 2019, 12, 119–122. [Google Scholar] [CrossRef] [Green Version]
- Hruby, F. The Sound of Being There: Audiovisual Cartography with Immersive Virtual Environments. J. Cartogr. Geogr. Inf. 2019, 69, 19–28. [Google Scholar] [CrossRef] [Green Version]
- Schmohl, S.; Tutzauer, P.; Haala, N. Stuttgart City Walk: A Case Study on Visualizing Textured DSM Meshes for the General Public Using Virtual Reality. PFG-J. Photogramm. Remote Sens. Geoinf. Sci. 2020, 88, 147–154. [Google Scholar] [CrossRef]
- Zhao, J.; Wallgrün, J.O.; La Femina, P.C.; Normandeau, J.; Klippel, A. Harnessing the power of immersive virtual reality—Visualization and analysis of 3D earth science data sets. Geo-Spat. Inf. Sci. 2019, 22, 237–250. [Google Scholar] [CrossRef]
- Jamei, E.; Mortimer, M.; Seyedmahmoudian, M.; Horan, B.; Stojcevski, A. Investigating the Role of Virtual Reality in Planning for Sustainable Smart Cities. Sustainability 2017, 9, 2006. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Wright, J.; Gopal, S.; Phillips, N. Seeing the invisible: From imagined to virtual urban landscapes. Cities 2020, 98, 102559. [Google Scholar] [CrossRef]
- Lütjens, M.; Kersten, T.; Dorschel, B.; Tschirschwitz, F. Virtual Reality in Cartography: Immersive 3D Visualization of the Arctic Clyde Inlet (Canada) Using Digital Elevation Models and Bathymetric Data. Multimodal Technol. Interact. 2019, 3, 9. [Google Scholar] [CrossRef] [Green Version]
- Edler, D.; Kühne, O.; Jenal, C.; Vetter, M.; Dickmann, F. Potenziale der Raumvisualisierung in Virtual Reality (VR) für die sozialkonstruktivistische Landschaftsforschung. J. Cartogr. Geogr. Inf. 2018, 68, 245–254. [Google Scholar] [CrossRef]
- Berger, M.; Bill, R. Combining VR Visualization and Sonification for Immersive Exploration of Urban Noise Standards. Multimodal Technol. Interact. 2019, 3, 34. [Google Scholar] [CrossRef] [Green Version]
- Kersten, T.P.; Deggim, S.; Tschirschwitz, F.; Lindstaedt, M.; Hinrichsen, N. Segeberg 1600—Eine Stadtrekonstruktion in Virtual Reality. KN J. Cartogr. Geogr. Inf. 2018, 68, 183–191. [Google Scholar] [CrossRef]
- Büyüksalih, G.; Kan, T.; Özkan, G.E.; Meriç, M.; Isın, L.; Kersten, T.P. Preserving the Knowledge of the Past Through Virtual Visits: From 3D Laser Scanning to Virtual Reality Visualisation at the Istanbul Çatalca İnceğiz Caves. PFG-J. Photogramm. Remote Sens. Geoinf. Sci. 2020, 88, 133–146. [Google Scholar] [CrossRef]
- Carbonell-Carrera, C.; Saorín, J.L. Geospatial Google Street View with Virtual Reality: A Motivational Approach for Spatial Training Education. ISPRS Int. J. Geo-Inf. 2017, 6, 261. [Google Scholar] [CrossRef] [Green Version]
- Šašinka, Č.; Stachoň, Z.; Sedlák, M.; Chmelík, J.; Herman, L.; Kubíček, P.; Šašinková, A.; Doležal, M.; Tejkl, H.; Urbánek, T.; et al. Collaborative Immersive Virtual Environments for Education in Geography. ISPRS Int. J. Geo-Inf. 2019, 8, 3. [Google Scholar] [CrossRef] [Green Version]
- Hruby, F.; Castellanos, I.; Ressl, R. Cartographic Scale in Immersive Virtual Environments. J. Cartogr. Geogr. Inf. 2020, 21, 399. [Google Scholar] [CrossRef]
- Liang, Z.; Zhou, K.; Gao, K. Development of Virtual Reality Serious Game for Underground Rock-Related Hazards Safety Training. IEEE Access 2019, 7, 118639–118649. [Google Scholar] [CrossRef]
- Boletsis, C.; Cedergren, J.E. VR Locomotion in the New Era of Virtual Reality: An Empirical Comparison of Prevalent Techniques. Adv. Hum.-Comput. Interact. 2019, 2019, 1–15. [Google Scholar] [CrossRef]
- Ruddle, R.A.; Volkova, E.; Bülthoff, H.H. Walking improves your cognitive map in environments that are large-scale and large in extent. ACM Trans. Comput.-Hum. Interact. 2011, 18, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Coomer, N.; Bullard, S.; Clinton, W.; Williams-Sanders, B. Evaluating the effects of four VR locomotion methods: Joystick, arm-cycling, point-tugging, and teleporting. In Proceedings of the SAP’18: 15th ACM Symposium on Applied Perception, Vancouver, BC, Canada, 10–11 August 2018; Grimm, C., Willemsen, P., Eds.; Association for Computing Machinery: New York, NY, USA, 2018; pp. 1–8. [Google Scholar]
- Cherep, L.A.; Lim, A.F.; Kelly, J.W.; Acharya, D.; Velasco, A.; Bustamante, E.; Ostrander, A.G.; Gilbert, S.B. Spatial cognitive implications of teleporting through virtual environments. J. Exp. Psychol. Appl. 2020, 26, 480–492. [Google Scholar] [CrossRef] [Green Version]
- Kelly, J.W.; Ostrander, A.G.; Lim, A.F.; Cherep, L.A.; Gilbert, S.B. Teleporting through virtual environments: Effects of path scale and environment scale on spatial updating. IEEE Trans. Vis. Comput. Graph. 2020, 26, 1841–1850. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Paris, R.; Klag, J.; Rajan, P.; Buck, L.; McNamara, T.P.; Bodenheimer, B. How Video Game Locomotion Methods Affect Navigation in Virtual Environments. In Proceedings of the ACM Symposium on Applied Perception 2019, SAP’19: ACM Symposium on Applied Perception 2019, Barcelona, Spain, 19–20 September 2019; Neyret, S., Kokkinara, E., Franco, M.G., Hoyet, L., Cunningham, D.W., Świdrak, J., Eds.; ACM: New York, NY, USA, 2019; pp. 1–7, ISBN 9781450368902. [Google Scholar]
- Epstein, R.A.; Patai, E.Z.; Julian, J.B.; Spiers, H.J. The cognitive map in humans: Spatial navigation and beyond. Nat. Neurosci. 2017, 20, 1504–1513. [Google Scholar] [CrossRef] [PubMed]
- Campos, J.L.; Butler, J.S.; Bülthoff, H.H. Contributions of visual and proprioceptive information to travelled distance estimation during changing sensory congruencies. Exp. Brain Res. 2014, 232, 3277–3289. [Google Scholar] [CrossRef]
- Campos, J.L.; Butler, J.S.; Bülthoff, H.H. Multisensory integration in the estimation of walked distances. Exp. Brain Res. 2012, 218, 551–565. [Google Scholar] [CrossRef]
- Cheng, Z.; Gu, Y. Vestibular System and Self-Motion. Front. Cell. Neurosci. 2018, 12, 456. [Google Scholar] [CrossRef]
- Lappe, M.; Bremmer, F.; van den Berg, A.V. Perception of self-motion from visual flow. Trends Cogn. Sci. 1999, 3, 329–336. [Google Scholar] [CrossRef]
- Koenderink, J.J. Optic flow. Vis. Res. 1986, 26, 161–179. [Google Scholar] [CrossRef]
- Montello, D.R. Navigation. In The Cambridge Handbook of Visuospatial Thinking; Shah, P., Miyake, A., Eds.; Cambridge University Press: Cambridge, UK, 2012; pp. 257–294. ISBN 9780511610448. [Google Scholar]
- Dietz, V. Proprioception and locomotor disorders. Nat. Rev. Neurosci. 2002, 3, 781–790. [Google Scholar] [CrossRef]
- Lopez, C.; Blanke, O. The thalamocortical vestibular system in animals and humans. Brain Res. Rev. 2011, 67, 119–146. [Google Scholar] [CrossRef] [Green Version]
- Angelaki, D.E.; Cullen, K.E. Vestibular system: The many facets of a multimodal sense. Annu. Rev. Neurosci. 2008, 31, 125–150. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Langbehn, E.; Lubos, P.; Bruder, G.; Steinicke, F. Bending the Curve: Sensitivity to Bending of Curved Paths and Application in Room-Scale VR. IEEE Trans. Vis. Comput. Graph. 2017, 23, 1389–1398. [Google Scholar] [CrossRef]
- Shewaga, R.; Uribe-Quevedo, A.; Kapralos, B.; Alam, F. A Comparison of Seated and Room-Scale Virtual Reality in a Serious Game for Epidural Preparation. IEEE Trans. Emerg. Top. Comput. 2020, 8, 218–232. [Google Scholar] [CrossRef]
- Langbehn, E.; Lubos, P.; Steinicke, F. Evaluation of Locomotion Techniques for Room-Scale VR: Joystick, Teleportation, and Redirected Walking. In Proceedings of the Virtual Reality International Conference—Laval Virtual on—VRIC’18, the Virtual Reality International Conference—Laval Virtual, Laval, France, 4–6 April 2018; Richir, S., Ed.; ACM Press: New York, NY, USA, 2018; pp. 1–9, ISBN 9781450353816. [Google Scholar]
- Schnack, A.; Wright, M.J.; Holdershaw, J.L. Does the locomotion technique matter in an immersive virtual store environment—Comparing motion-tracked walking and instant teleportation. J. Retail. Consum. Serv. 2021, 58, 1–10. [Google Scholar] [CrossRef]
- Porter, J.; Robb, A. An Analysis of Longitudinal Trends in Consumer Thoughts on Presence and Simulator Sickness in VR Games. In Proceedings of the Annual Symposium on Computer-Human Interaction in Play. CHI PLAY ‘19: The Annual Symposium on Computer-Human Interaction in Play, Barcelona, Spain, 22–25 October 2019; Arnedo, J., Nacke, L.E., Vanden Abeele, V., Toups, Z.O., Eds.; ACM: New York, NY, USA, 2019; pp. 277–285, ISBN 9781450366885. [Google Scholar]
- Bhandari, J.; MacNeilage, P.; Folmer, E. Teleportation without Spatial Disorientation Using Optical Flow Cues. In Proceedings of the 44th Graphics Interface Conference, Toronto, ON, Canada, 8–11 May 2018; Batty, C., Ed.; Canadian Human-Computer Communications Society: Waterloo, ON, Canada, 2018. ISBN 978-0-9947868-3-8. [Google Scholar]
- McLeod, R.W.; Ross, H.E. Optic-flow and cognitive factors in time-to-collision estimates. Perception 1983, 12, 417–423. [Google Scholar] [CrossRef] [PubMed]
- Redlick, F.P.; Jenkin, M.; Harris, L.R. Humans can use optic flow to estimate distance of travel. Vis. Res. 2001, 41, 213–219. [Google Scholar] [CrossRef] [Green Version]
- Previc, F.H. The Neuropsychology of 3-D Space. Psychol. Bull. 1998, 124, 123–164. [Google Scholar] [CrossRef]
- Armbrüster, C.; Wolter, M.; Kuhlen, T.; Spijkers, W.; Fimm, B. Depth Perception in Virtual Reality: Distance Estimations in Peri- and Extrapersonal Space. Cyberpsychol. Behav. 2008, 11, 9–15. [Google Scholar] [CrossRef] [PubMed]
- Naceri, A.; Chellali, R.; Hoinville, T. Depth Perception within Peripersonal Space Using Head-Mounted Display. Presence 2011, 20, 254–272. [Google Scholar] [CrossRef]
- Ng, A.K.T.; Chan, L.K.Y.; Lau, H.Y.K. Depth Perception in Virtual Environment: The Effects of Immersive System and Freedom of Movement. In Proceedings of the VAMR 2016: Virtual, Augmented and Mixed Reality. International Conference on Virtual, Augmented and Mixed Reality, Toronto, ON, Canada, 17–22 July 2016; Lackey, S., Shumaker, R., Eds.; Springer: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Witmer, B.G.; Sadowski, W.J. Nonvisually Guided Locomotion to a Previously Viewed Target in Real and Virtual Environments. Hum. Factors 1998, 40, 478–488. [Google Scholar] [CrossRef]
- Murgia, A.; Sharkey, P.M. Estimation of Distances in Virtual Environments Using Size Constancy. Int. J. Virtual Real. 2019, 8, 67–74. [Google Scholar] [CrossRef]
- Willemsen, P.; Gooch, A.A. Perceived egocentric distances in real, image-based, and traditional virtual environments. In Proceedings of the IEEE Virtual Reality 2002, Orlando, FL, USA, 24–28 March 2002; IEEE Computer Society: Washington, DC, USA, 2002; pp. 275–276, ISBN 0-7695-1492-8. [Google Scholar]
- Messing, R.; Durgin, F.H. Distance Perception and the Visual Horizon in Head-Mounted Displays. ACM Trans. Appl. Percept. 2005, 2, 234–250. [Google Scholar] [CrossRef]
- Keil, J.; Korte, A.; Ratmer, A.; Edler, D.; Dickmann, F. Augmented Reality (AR) and Spatial Cognition: Effects of Holographic Grids on Distance Estimation and Location Memory in a 3D Indoor Scenario. PFG-J. Photogramm. Remote Sens. Geoinf. Sci. 2020, 88, 165–172. [Google Scholar] [CrossRef]
- Stefanucci, J.K.; Proffitt, D.R.; Banton, T.; Epstein, W. Distances appear different on hills. Percept. Psychophys. 2005, 67, 1052–1060. [Google Scholar] [CrossRef] [Green Version]
- Richardson, A.R.; Waller, D. The effect of feedback training on distance estimation in virtual environments. Appl. Cognit. Psychol. 2005, 19, 1089–1108. [Google Scholar] [CrossRef] [Green Version]
- Allen, G.L.; Rashotte, M.A. Training metric accuracy in distance estimation skill: Pictures versus words. Appl. Cognit. Psychol. 2006, 20, 171–186. [Google Scholar] [CrossRef]
- Frenz, H.; Lappe, M. Absolute travel distance from optic flow. Vis. Res. 2005, 45, 1679–1692. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Banton, T.; Stefanucci, J.; Durgin, F.; Fass, A.; Proffitt, D. The Perception of Walking Speed in a Virtual Environment. Presence: Teleoper. Virtual Environ. 2005, 14, 394–406. [Google Scholar] [CrossRef]
- Frenz, H.; Lappe, M.; Kolesnik, M.; Bührmann, T. Estimation of travel distance from visual motion in virtual environments. ACM Trans. Appl. Percept. 2007, 4, 1–18. [Google Scholar] [CrossRef]
- Magill, R.A.; Anderson, D. Motor Learning and Control. Concepts and Applications, 10th ed.; McGraw-Hill: New York, NY, USA, 2014; ISBN 978-0-07-802267-8. [Google Scholar]
- Brooks, V.B. Motor control. How posture and movements are governed. Phys. Ther. 1983, 63, 664–673. [Google Scholar] [CrossRef]
- Paas, F.; Tuovinen, J.E.; Tabbers, H.; van Gerven, P.W.M. Cognitive Load Measurement as a Means to Advance Cognitive Load Theory. Educ. Psychol. 2003, 38, 63–71. [Google Scholar] [CrossRef]
- Kirschner, P.A. Cognitive load theory: Implications of cognitive load theory on the design of learning. Learn. Instr. 2002, 12, 1–10. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chronological Order | Training Condition | Locomotion Technique | |
|---|---|---|---|
| Group A | Group B | ||
| Distance Visible Target | Before Training | Teleport | Artificial Locomotion |
| Distance Invisible Target | |||
| Distance Visible Target | |||
| Distance Invisible Target | |||
| Training | |||
| Distance Visible Target | After Training | ||
| Distance Invisible Target | |||
| Distance Visible Target | |||
| Distance Invisible Target | |||
| Distance Visible Target | Before Training | Artificial Locomotion | Teleport |
| Distance Invisible Target | |||
| Distance Visible Target | |||
| Distance Invisible Target | |||
| Training | |||
| Distance Visible Target | After Training | ||
| Distance Invisible Target | |||
| Distance Visible Target | |||
| Distance Invisible Target | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Keil, J.; Edler, D.; O’Meara, D.; Korte, A.; Dickmann, F. Effects of Virtual Reality Locomotion Techniques on Distance Estimations. ISPRS Int. J. Geo-Inf. 2021, 10, 150. https://doi.org/10.3390/ijgi10030150
Keil J, Edler D, O’Meara D, Korte A, Dickmann F. Effects of Virtual Reality Locomotion Techniques on Distance Estimations. ISPRS International Journal of Geo-Information. 2021; 10(3):150. https://doi.org/10.3390/ijgi10030150
Chicago/Turabian StyleKeil, Julian, Dennis Edler, Denise O’Meara, Annika Korte, and Frank Dickmann. 2021. "Effects of Virtual Reality Locomotion Techniques on Distance Estimations" ISPRS International Journal of Geo-Information 10, no. 3: 150. https://doi.org/10.3390/ijgi10030150
APA StyleKeil, J., Edler, D., O’Meara, D., Korte, A., & Dickmann, F. (2021). Effects of Virtual Reality Locomotion Techniques on Distance Estimations. ISPRS International Journal of Geo-Information, 10(3), 150. https://doi.org/10.3390/ijgi10030150