
Detecting Multi-Decadal Changes in Seagrass Cover in Tauranga Harbour, New Zealand, Using Landsat Imagery and Boosting Ensemble Classification Techniques



Abstract
:1. Introduction
2. Materials and Methods
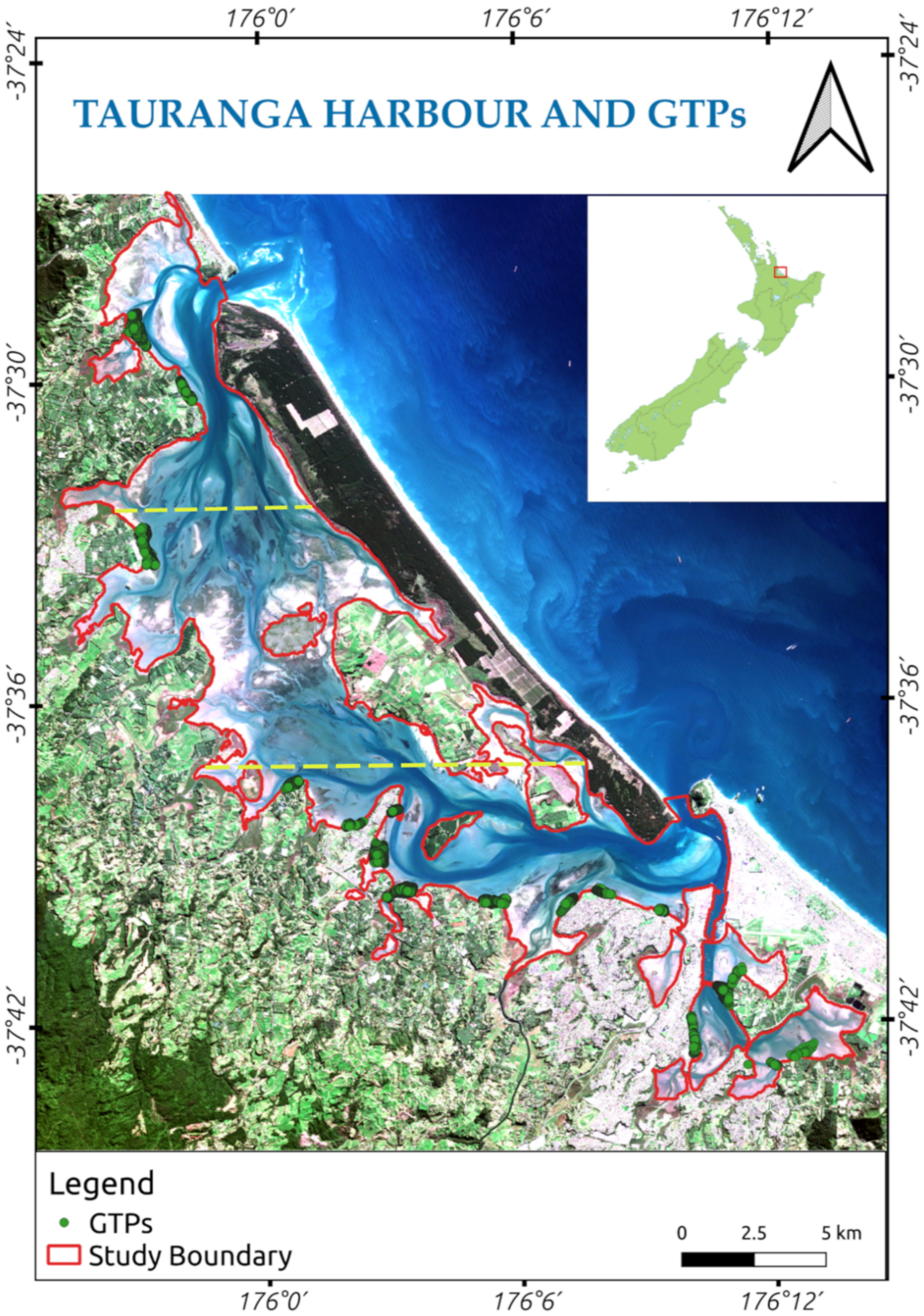
2.1. Study Site
2.2. Satellite Image Acquisition
2.3. Field Survey Data
2.4. Ground-Truth Historical Scenes
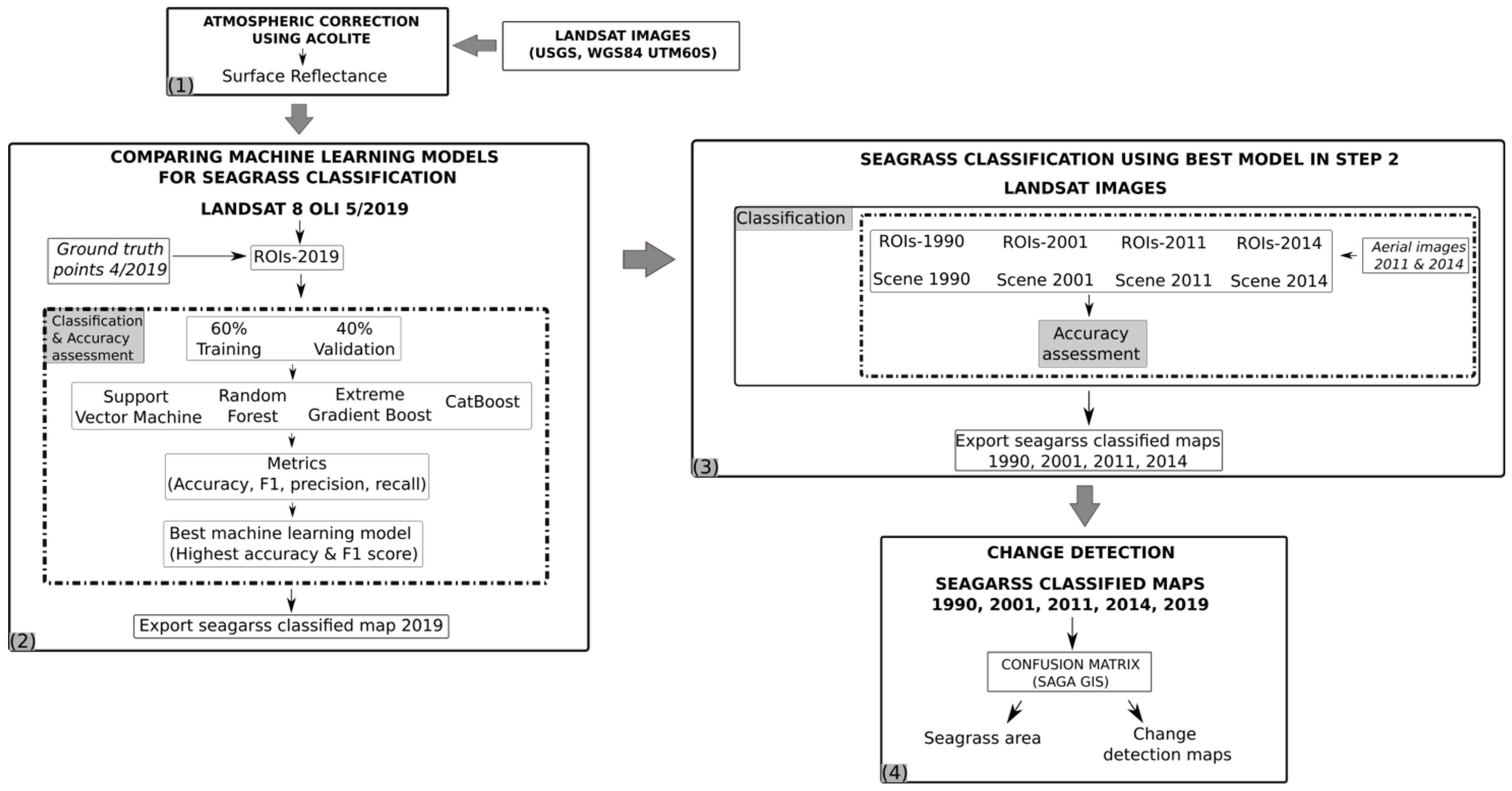
2.5. Development of Seagrass Maps and Detection of Change
2.5.1. Atmospheric Correction
2.5.2. Application of Machine-Learning Algorithms
Hyper-Parameter Tuning for Selected Machine-Learning Models
Theoretical Background of the Machine-Learning Algorithms Used Random Forests
Support Vector Machine
Extreme Gradient Boost
CatBoost
2.5.3. Comparison of ML Algorithms for Seagrass Mapping Using the Landsat Image Taken in 2019
2.5.4. Seagrass Mapping Using Landsat Images in 1990, 2001, 2011, and 2014
2.5.5. Change Detection
2.6. Evaluation Criteria
- ypred: predicted value
- y: corresponding true value
- po is the observed agreement
- pe is the expected agreement
- P: the number of concordant pair
- Q: the number of discordant pair
- U: the number of ties in predicted value
- T: the number of ties in true value
- tp: true positive
- fp: false positive
- fn: false negative
- fn: false negative
- fp: false positive
3. Results
3.1. Performance of the RF, SVM, XGB, and CB Models Using Landsat Image and GTPs for 2019 Data
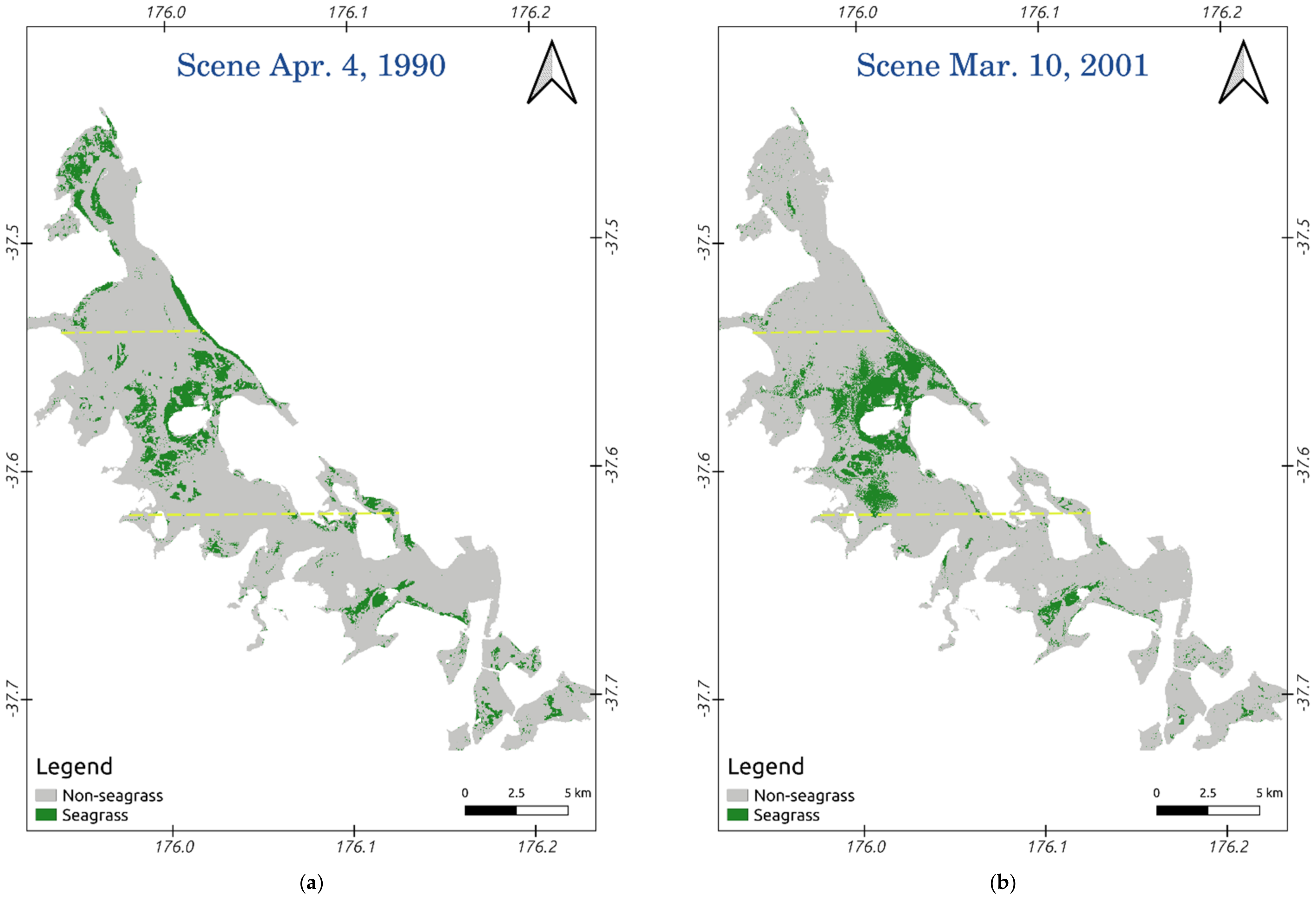
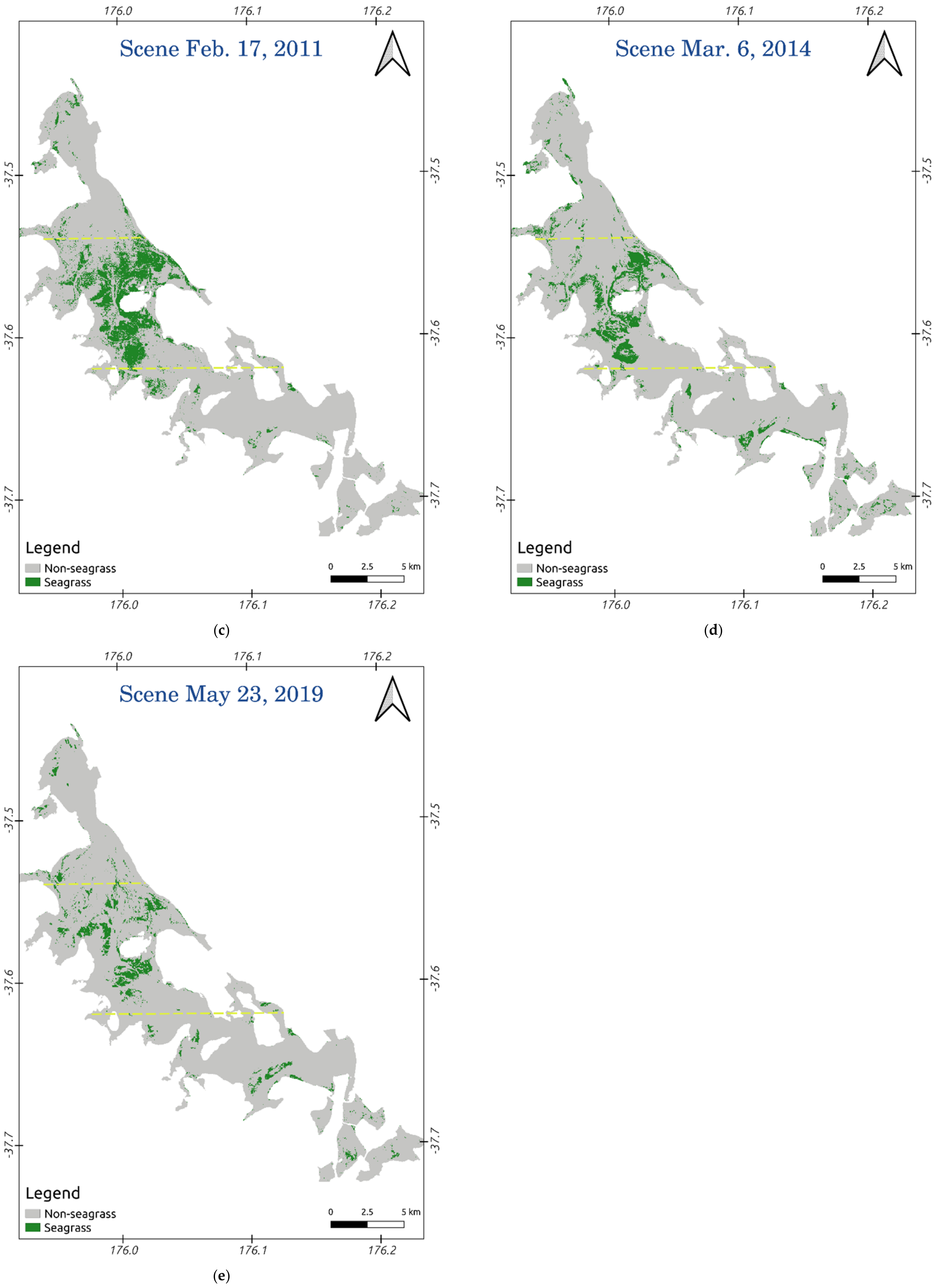
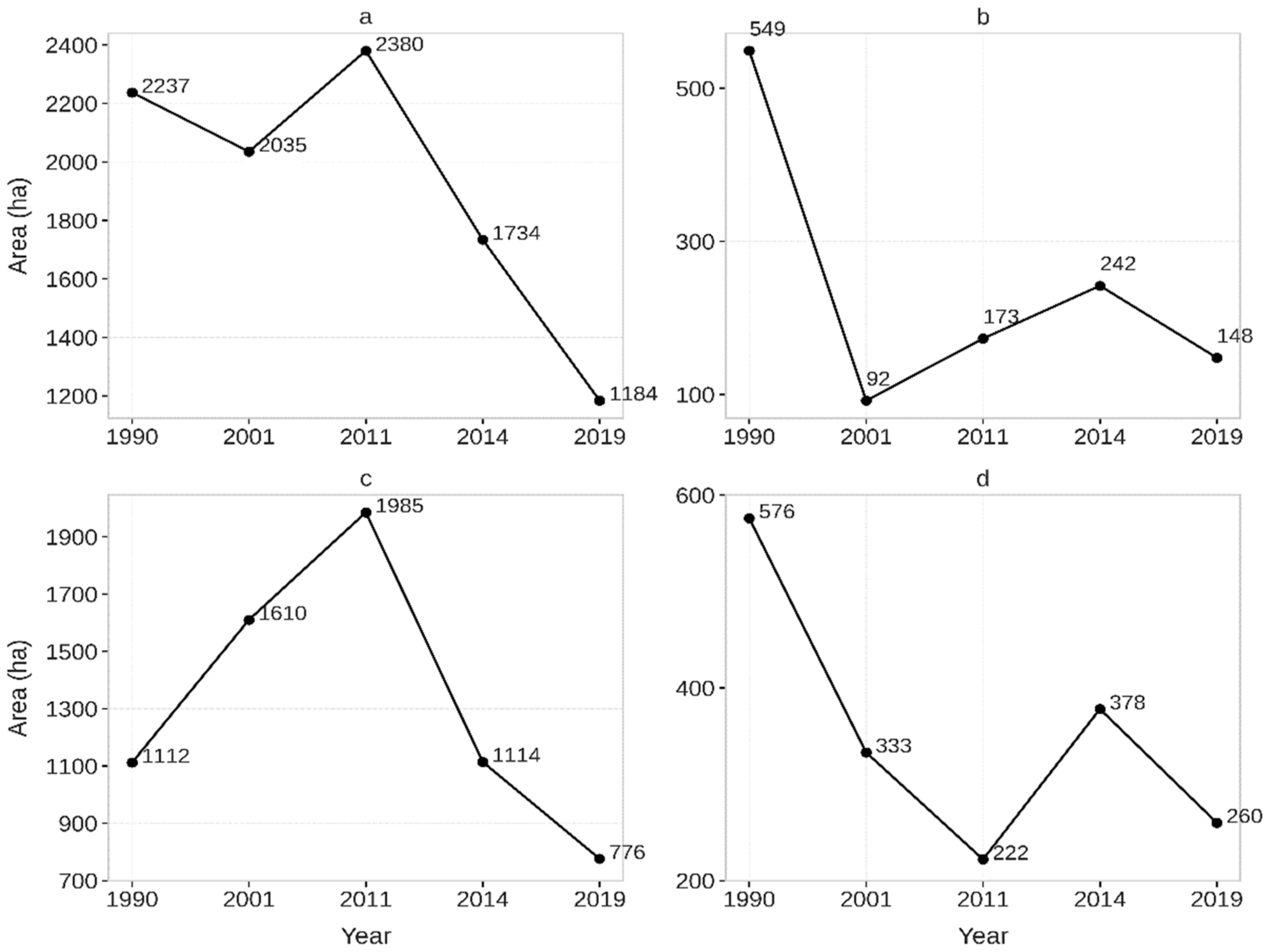
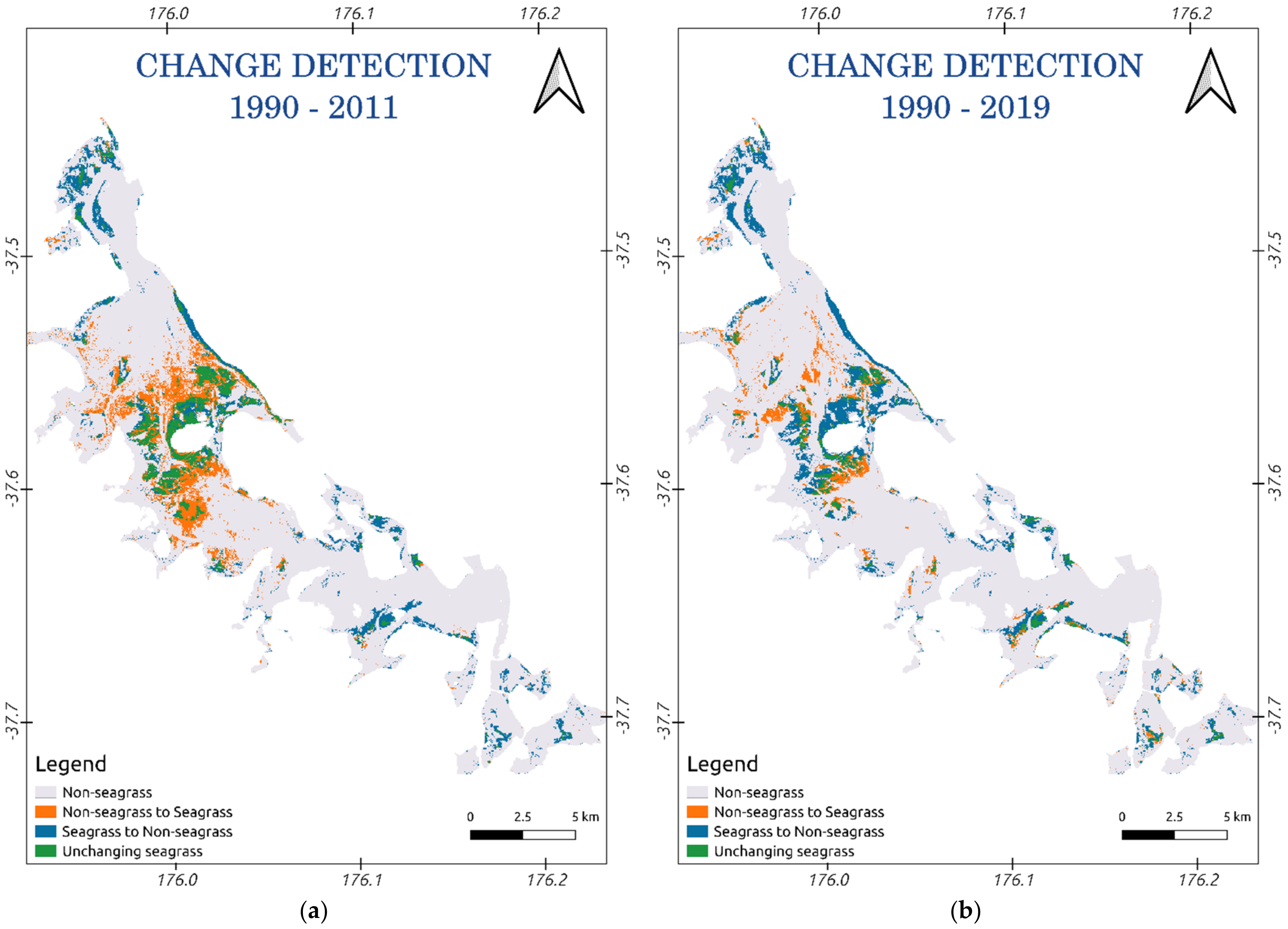
3.2. Seagrass Change Detection from 1990–2019
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Ancillary data | |
| Gas transmittance | True |
| Ozone concentration (cm−1) | 0.3 |
| Water vapor concentration (g cm−2) | 1.5 |
| Pressure | Normal pressure |
| Masking | |
| Negative reflectance masking | True |
| Cirrus masking | True |
| Other parameters | |
| Sky correction | True |
| Dark spectrum fitting | Fixed |
| Sun glint correction | False |
| Output parameter | |
| Surface reflectance for water pixel (ρw) | ρw443 ρw482 ρw561 ρw654 |
| Random Forest | Extreme Gradient Boost | ||
|---|---|---|---|
| Bootstrap | True | Booster | GbTree |
| Max. depth | 8 | Gamma | 1 |
| Max. features | Auto | Learning rate | 0.2 |
| Min. sample leaf | 1 | Max. depth | 5 |
| Min. sample split | 3 | Min. child weight | 3 |
| Number of trees | 100 | Number of trees | 100 |
| Support Vector Machine | CatBoost | ||
| Kernel | RBF | Depth | 7 |
| C | 100 | Iteration (Number of trees) | 200 |
| Gamma | 1000 | Learning rate | 0.2 |
| L2 leaf reg | 1 | ||
| Dataset | Landsat Acquisition Date | Number of Pixels | |
|---|---|---|---|
| 60% for Training | 40% For Testing | ||
| DS1 | 4 April 1990 | 2171 | 1448 |
| DS2 | 10 March 2001 | 3000 | 2001 |
| DS3 | 17 February 2011 | 2618 | 1746 |
| DS4 | 6 March 2014 | 2544 | 1696 |
| DS5 | 23 May 2019 | 1830 | 1221 |
| Model | κ | τ | p-Value of τ |
|---|---|---|---|
| Data DS5, date 23 May 2019 | |||
| RF | 0.90 | 0.90 | 0.00 |
| SVC | 0.87 | 0.87 | 0.00 |
| CB | 0.92 | 0.92 | 0.00 |
| XGB | 0.90 | 0.90 | 0.00 |
| Data DS1, date 4 April 1990 | |||
| CB | 0.95 | 0.95 | 0.00 |
| Data DS2, date 10 March 2001 | |||
| CB | 0.92 | 0.92 | 0.00 |
| Data DS2, date 17 February 2011 | |||
| CB | 0.94 | 0.94 | 0.00 |
| Data DS4, date 6 March 2014 | |||
| CB | 0.93 | 0.93 | 0.00 |
| Acronym/Abbreviation | Meaning | Explanation |
|---|---|---|
| ACOLITE | Atmospheric correction for operational land imager (OLI) ‘lite’ toolbox | A Python language-based application for atmospheric correction of satellite imagery |
| Accuracy | An agreement degree between the classified values and the ground-truth values in a classification task | |
| CB | CatBoost | A machine-learning algorithm |
| XGB | Extreme Gradient Boost | A machine-learning algorithm |
| F1 | F1 | A harmonic measurement of precision and recall scores in the prediction of a machine-learning model |
| GPS | Global Positioning System | A satellite-based system providing positioning services |
| GTPs | Ground-Truth Points | GTPs are the boundary points of any given classes in the study site, defined by GPS |
| Κ | Kappa coefficient | A statistical index measuring the accuracy (agreement between predictions and ground-truthed values) of the classification. A higher Kappa coefficient denotes a more accurate classification |
| τ | Kendall’s tau coefficient | A nonparametric measurement to evaluate the classification’s accuracy. A higher Kendall’s tau coefficient denotes a more accurate classification |
| ML | Machine learning | An artificial intelligence (AI) approach that builds an application/algorithm for a specific output by learning from data |
| NIR | Near infrared | The near infrared region in the electromagnetic spectrum |
| Precision | A score to measure the success of the prediction of a machine-learning model. A higher precision denotes a more accurate prediction | |
| RF | Random Forest | A machine-learning algorithm |
| Recall | A score to measure the success of the prediction of a machine-learning model. A higher recall denotes a more accurate prediction | |
| RBF | Radial basis function | A function used in the Support Vector Machine model, together with linear and polynomial functions |
| ROI | Region of interest | A bounded region used in image classification where the pixels contain a given class |
| SVM | Support Vector Machine | A machine-learning algorithm |
| UAV | Unmanned aerial vehicle | An aircraft without a human pilot |
| GLOVIS | USGS Global Visualization Viewer | A web-based system for satellite image visualization and downloading |
| UTM | Universal Transverse Mercator | A map projection |
| VHR | Very high spatial resolution | Indicating satellite images that have spatial resolution from centimeters to a few meters |
| WGS | World Geodetic System | A standard coordinate system used in cartography. |
References
- Nordlund, L.M.; Jackson, E.L.; Nakaoka, M.; Samper-Villarreal, J.; Beca-Carretero, P.; Creed, J.C. Seagrass Ecosystem Services—What’s Next? Mar. Pollut. Bull. 2018, 134, 145–151. [Google Scholar] [CrossRef]
- Nordlund, L.M.; Koch, E.W.; Barbier, E.B.; Creed, J.C. Seagrass Ecosystem Services and Their Variability across Genera and Geographical Regions. PLoS ONE 2016, 11, e0163091. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fourqurean, J.W.; Duarte, C.M.; Kennedy, H.; Marbà, N.; Holmer, M.; Mateo, M.A.; Apostolaki, E.T.; Kendrick, G.A.; Krause-Jensen, D.; McGlathery, K.J.; et al. Seagrass Ecosystems as a Globally Significant Carbon Stock. Nat. Geosci. 2012, 5, 505–509. [Google Scholar] [CrossRef]
- Gullström, M.; Lyimo, L.D.; Dahl, M.; Samuelsson, G.S.; Eggertsen, M.; Anderberg, E.; Rasmusson, L.M.; Linderholm, H.W.; Knudby, A.; Bandeira, S.; et al. Blue Carbon Storage in Tropical Seagrass Meadows Relates to Carbonate Stock Dynamics, Plant–Sediment Processes, and Landscape Context: Insights from the Western Indian Ocean. Ecosystems 2018, 21, 551–566. [Google Scholar] [CrossRef] [Green Version]
- Orth, R.J.; Carruthers, T.J.B.; Dennison, W.C.; Duarte, C.M.; Fourqurean, J.W.; Heck, K.L.; Hughes, A.R.; Kendrick, G.A.; Kenworthy, W.J.; Olyarnik, S.; et al. A Global Crisis for Seagrass Ecosystems. BioScience 2006, 56, 987. [Google Scholar] [CrossRef] [Green Version]
- Waycott, M.; Duarte, C.M.; Carruthers, T.J.B.; Orth, R.J.; Dennison, W.C.; Olyarnik, S.; Calladine, A.; Fourqurean, J.W.; Heck, K.L.; Hughes, A.R.; et al. Accelerating Loss of Seagrasses across the Globe Threatens Coastal Ecosystems. Proc. Natl. Acad. Sci. USA 2009, 106, 12377–12381. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marbà, N.; Arias-Ortiz, A.; Masqué, P.; Kendrick, G.A.; Mazarrasa, I.; Bastyan, G.R.; Garcia-Orellana, J.; Duarte, C.M. Impact of Seagrass Loss and Subsequent Revegetation on Carbon Sequestration and Stocks. J. Ecol. 2015, 103, 296–302. [Google Scholar] [CrossRef]
- Cullen-Unsworth, L.; Unsworth, R. Seagrass Meadows, Ecosystem Services, and Sustainability. Environ. Sci. Policy Sustain. Dev. 2013, 55, 14–28. [Google Scholar] [CrossRef]
- Hejnowicz, A.P.; Kennedy, H.; Rudd, M.A.; Huxham, M.R. Harnessing the Climate Mitigation, Conservation and Poverty Alleviation Potential of Seagrasses: Prospects for Developing Blue Carbon Initiatives and Payment for Ecosystem Service Programmes. Front. Mar. Sci. 2015, 2. [Google Scholar] [CrossRef]
- Bujang, J.S.; Zakaria, M.H.; Short, F.T. Seagrass in Malaysia: Issues and Challenges Ahead. In The Wetland Book; Finlayson, C.M., Milton, G.R., Prentice, R.C., Davidson, N.C., Eds.; Springer: Dordrecht, The Netherlands, 2018; pp. 1875–1883. ISBN 978-94-007-4000-6. [Google Scholar]
- Unsworth, R.K.F.; McKenzie, L.J.; Collier, C.J.; Cullen-Unsworth, L.C.; Duarte, C.M.; Eklöf, J.S.; Jarvis, J.C.; Jones, B.L.; Nordlund, L.M. Global Challenges for Seagrass Conservation. Ambio 2018. [Google Scholar] [CrossRef] [Green Version]
- Pham, D.; Yokoya, N.; Bui, D.; Yoshino, K.; Friess, D. Remote Sensing Approaches for Monitoring Mangrove Species, Structure, and Biomass: Opportunities and Challenges. Remote Sens. 2019, 11, 230. [Google Scholar] [CrossRef] [Green Version]
- Traganos, D.; Reinartz, P. Interannual Change Detection of Mediterranean Seagrasses Using RapidEye Image Time Series. Front. Plant Sci. 2018, 9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Paulose, N.E.; Dilipan, E.; Thangaradjou, T. Integrating Indian Remote Sensing Multi-Spectral Satellite and Field Data to Estimate Seagrass Cover Change in the Andaman and Nicobar Islands, India. Ocean Sci. J. 2013, 48, 173–181. [Google Scholar] [CrossRef]
- Roelfsema, C.; Lyons, M.; Dunbabin, M.; Kovacs, E.M.; Phinn, S. Integrating Field Survey Data with Satellite Image Data to Improve Shallow Water Seagrass Maps: The Role of AUV and Snorkeller Surveys? Remote Sens. Lett. 2015, 6, 135–144. [Google Scholar] [CrossRef]
- Hossain, M.S.; Bujang, J.S.; Zakaria, M.H.; Hashim, M. The Application of Remote Sensing to Seagrass Ecosystems: An Overview and Future Research Prospects. Int. J. Remote Sens. 2015, 36, 61–114. [Google Scholar] [CrossRef]
- Chen, C.-F.; Lau, V.-K.; Chang, N.-B.; Son, N.-T.; Tong, P.-H.-S.; Chiang, S.-H. Multi-Temporal Change Detection of Seagrass Beds Using Integrated Landsat TM/ETM+/OLI Imageries in Cam Ranh Bay, Vietnam. Ecol. Inform. 2016, 35, 43–54. [Google Scholar] [CrossRef]
- Amone-Mabuto, M.; Bandeira, S.; da Silva, A. Long-Term Changes in Seagrass Coverage and Potential Links to Climate-Related Factors: The Case of Inhambane Bay, Southern Mozambique. West. Indian Ocean J. Mar. Sci. 2017, 16, 13–25. [Google Scholar]
- Phinn, S.R.; Kovacs, E.M.; Roelfsema, C.M.; Canto, R.F.; Collier, C.J.; McKenzie, L.J. Assessing the Potential for Satellite Image Monitoring of Seagrass Thermal Dynamics: For Inter- and Shallow Sub-Tidal Seagrasses in the Inshore Great Barrier Reef World Heritage Area, Australia. Int. J. Digit. Earth 2018, 11, 803–824. [Google Scholar] [CrossRef]
- Ha, N.T.; Manley-Harris, M.; Pham, T.D.; Hawes, I. A Comparative Assessment of Ensemble-Based Machine Learning and Maximum Likelihood Methods for Mapping Seagrass Using Sentinel-2 Imagery in Tauranga Harbor, New Zealand. Remote Sens. 2020, 12, 355. [Google Scholar] [CrossRef] [Green Version]
- McCarthy, M.J.; Halls, J.N. Habitat Mapping and Change Assessment of Coastal Environments: An Examination of WorldView-2, QuickBird, and IKONOS Satellite Imagery and Airborne LiDAR for Mapping Barrier Island Habitats. ISPRS Int. J. Geo-Inf. 2014, 3, 297–325. [Google Scholar] [CrossRef] [Green Version]
- Sousa, L.P.; Sousa, A.I.; Alves, F.L.; Lillebø, A.I. Ecosystem Services Provided by a Complex Coastal Region: Challenges of Classification and Mapping. Sci. Rep. 2016, 6, 22782. [Google Scholar] [CrossRef] [Green Version]
- Camps-Valls, G. Machine Learning in Remote Sensing Data Processing. In Proceedings of the 2009 IEEE International Workshop on Machine Learning for Signal Processing, Grenoble, France, 1–4 September 2009; pp. 1–6. [Google Scholar]
- Lary, D.J.; Alavi, A.H.; Gandomi, A.H.; Walker, A.L. Machine Learning in Geosciences and Remote Sensing. Geosci. Front. 2016, 7, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Maxwell, A.E.; Warner, T.A.; Fang, F. Implementation of Machine-Learning Classification in Remote Sensing: An Applied Review. Int. J. Remote Sens. 2018, 39, 2784–2817. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, H. Machine learning applications in oceanography. Aquat. Res. 2019, 161–169. [Google Scholar] [CrossRef]
- Machova, K.; Puszta, M.; Barcak, F.; Bednar, P. A Comparison of the Bagging and the Boosting Methods Using the Decision Trees Classifiers. Comput. Sci. Inf. Syst. 2006, 3, 57–72. [Google Scholar] [CrossRef]
- Bühlmann, P. Bagging, Boosting and Ensemble Methods. In Handbook of Computational Statistics; Gentle, J.E., Härdle, W.K., Mori, Y., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 985–1022. ISBN 978-3-642-21550-6. [Google Scholar]
- Huettmann, F. Boosting, Bagging and Ensembles in the Real World: An Overview, some Explanations and a Practical Synthesis for Holistic Global Wildlife Conservation Applications Based on Machine Learning with Decision Trees. In Machine Learning for Ecology and Sustainable Natural Resource Management; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 63–83. [Google Scholar]
- Yaman, E.; Subasi, A. Comparison of Bagging and Boosting Ensemble Machine Learning Methods for Automated EMG Signal Classification. Available online: https://www.hindawi.com/journals/bmri/2019/9152506/ (accessed on 2 December 2020).
- Northrop, A. IDEAS—LANDSAT Products Description Document; USGS: Reston, VA, USA, 2015; p. 68.
- Zhu, Z. Change Detection Using Landsat Time Series: A Review of Frequencies, Preprocessing, Algorithms, and Applications. ISPRS J. Photogramm. Remote Sens. 2017, 130, 370–384. [Google Scholar] [CrossRef]
- Ihlen, V. Landsat 8 (L8) Data Users Handbook; USGS: Reston, VA, USA, 2019.
- Green, E.P.; Mumby, P.J.; Edwards, A.J.; Clark, C.D. A Review of Remote Sensing for the Assessment and Management of Tropical Coastal Resources. Coast. Manag. 1996, 24, 1–40. [Google Scholar] [CrossRef]
- Ha, N.T.; Yoshino, K.; Hoang Son, T.P. Seagrass Mapping Using ALOS AVNIR-2 Data in Lap An Lagoon, Thua Thien Hue, Viet Nam; Frouin, R.J., Ebuchi, N., Pan, D., Saino, T., Eds.; SPIE: Kyoto, Japan, 2012; p. 85250S. [Google Scholar]
- Garcia, R.; Hedley, J.; Tin, H.; Fearns, P. A Method to Analyze the Potential of Optical Remote Sensing for Benthic Habitat Mapping. Remote Sens. 2015, 7, 13157–13189. [Google Scholar] [CrossRef] [Green Version]
- Park, S.G. Extent of Seagrass in the Bay of Plenty in 2011; Environmental Publication; Bay of Plenty Reginal Council: Whakatane, New Zealand, 2011; p. 52.
- Reeve, G.; Stephens, S.; Wadhwa, A. Tauranga Harbour Inundation Modelling; NIWA: Tauranga, New Zealand, 2018; p. 107. [Google Scholar]
- Tay, H.; Bryan, K.; de Lange, W.; Pilditch, C. The Hydrodynamics of the Southern Basin of Tauranga Harbour. N. Z. J. Mar. Freshw. Res. 2013, 47, 249–274. [Google Scholar] [CrossRef] [Green Version]
- Collier, C.J.; Villacorta-Rath, C.; van Dijk, K.; Takahashi, M.; Waycott, M. Seagrass Proliferation Precedes Mortality during Hypo-Salinity Events: A Stress-Induced Morphometric Response. PLoS ONE 2014, 9, e94014. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- York, P.H.; Gruber, R.K.; Hill, R.; Ralph, P.J.; Booth, D.J.; Macreadie, P.I. Physiological and Morphological Responses of the Temperate Seagrass Zostera Muelleri to Multiple Stressors: Investigating the Interactive Effects of Light and Temperature. PLoS ONE 2013, 8, e76377. [Google Scholar] [CrossRef] [PubMed]
- Collier, C.J.; Ow, Y.X.; Langlois, L.; Uthicke, S.; Johansson, C.L.; O’Brien, K.R.; Hrebien, V.; Adams, M.P. Optimum Temperatures for Net Primary Productivity of Three Tropical Seagrass Species. Front. Plant Sci. 2017, 8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Turner, S.J. Growth and Productivity of Intertidal Zostera Capricorni in New Zealand Estuaries. N. Z. J. Mar. Freshw. Res. 2007, 41, 77–90. [Google Scholar] [CrossRef]
- Ramage, D.L.; Schiel, D.R. Reproduction in the Seagrass Zostera Novazelandica on Intertidal Platforms in Southern New Zealand. Mar. Biol. 1998, 130, 479–489. [Google Scholar] [CrossRef]
- Schwarz, A.-M.; Turner, S. Management and Conservation of Seagrass in New Zealand: An Introduction; Science & Technical Publishing: Wellington, New Zealand, 2006; p. 90. [Google Scholar]
- Hicks, M.; Semadeni-Davies, A.; Haddadchi, A.; Shankar, U.; Plew, D. Updated Sediment Load Estimator for New Zealand; NIWA Client Report 2018341CH prepared for Ministry for the Environment; National Institute of Water and Atmospheric Research Ltd.: Christchurch, New Zealand, 2019; p. 190. [Google Scholar]
- Hicks, M. Review and Analysis of Suspended Sediment Monitoring in the Tauranga Moana Catchment; NIWA Client Report 2019183CH prepared for Bay of Plenty Regional Council; NIWA: Auckland, New Zealand, 2019; p. 57. [Google Scholar]
- Cabaço, S.; Santos, R.; Duarte, C.M. The Impact of Sediment Burial and Erosion on Seagrasses: A Review. Estuar. Coast. Shelf Sci. 2008, 79, 354–366. [Google Scholar] [CrossRef]
- Saunders, M.I.; Atkinson, S.; Klein, C.J.; Weber, T.; Possingham, H.P. Increased Sediment Loads Cause Non-Linear Decreases in Seagrass Suitable Habitat Extent. PLoS ONE 2017, 12, e0187284. [Google Scholar] [CrossRef] [Green Version]
- USGS GloVis. Available online: https://glovis.usgs.gov/ (accessed on 2 February 2019).
- Park, S.G. Changes in Abundance of Seagrass (Zostera spp.) in Tauranga Harbour from 1959–1996; Environment BOP: Whakatane, New Zealand, 1999; p. 19.
- RBINS. ACOLITE Python User Manual; RBINS: Brussels, Belgium, 2018; p. 10. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-Learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Breiman, L. Random Forest. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Belgiu, M.; Drăguţ, L. Random Forest in Remote Sensing: A Review of Applications and Future Directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Mountrakis, G.; Im, J.; Ogole, C. Support Vector Machines in Remote Sensing: A Review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Tomar, D.; Agarwal, S. Twin Support Vector Machine: A Review from 2007 to 2014. Egypt. Inform. J. 2015, 16, 55–69. [Google Scholar] [CrossRef]
- Georganos, S.; Grippa, T.; Vanhuysse, S.; Lennert, M.; Shimoni, M.; Wolff, E. Very High Resolution Object-Based Land Use–Land Cover Urban Classification Using Extreme Gradient Boosting. IEEE Geosci. Remote Sens. Lett. 2018, 15, 607–611. [Google Scholar] [CrossRef] [Green Version]
- Prokhorenkova, L.; Gusev, G.; Vorobev, A.; Dorogush, A.V.; Gulin, A. CatBoost: Unbiased Boosting with Categorical Features. arXiv 2019, arXiv:170609516. [Google Scholar]
- NIWA. The National Climate Database. Available online: https://cliflo.niwa.co.nz/ (accessed on 20 July 2020).
- BOPRC Seagrass Extent—Bay of Plenty. Available online: http://gis.boplass.govt.nz/arcgis/rest/services/imagery (accessed on 20 October 2019).
- Conrad, O.; Bechtel, B.; Bock, M.; Dietrich, H.; Fischer, E.; Gerlitz, L.; Wehberg, J.; Wichmann, V.; Böhner, J. System for Automated Geoscientific Analyses (SAGA) v. 2.1.4. Geosci. Model Dev. 2015, 8, 1991–2007. [Google Scholar] [CrossRef] [Green Version]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Raschka, S. MLxtend: Providing Machine Learning and Data Science Utilities and Extensions to Python’s Scientific Computing Stack. J. Open Source Softw. 2018, 3, 638. [Google Scholar] [CrossRef]
- Traganos, D.; Reinartz, P. Mapping Mediterranean Seagrasses with Sentinel-2 Imagery. Mar. Pollut. Bull. 2017. [Google Scholar] [CrossRef] [Green Version]
- Sun, F.; Wang, R.; Wan, B.; Su, Y.; Guo, Q.; Huang, Y.; Wu, X. Efficiency of Extreme Gradient Boosting for Imbalanced Land Cover Classification Using an Extended Margin and Disagreement Performance. ISPRS Int. J. Geo-Inf. 2019, 8, 315. [Google Scholar] [CrossRef] [Green Version]
- Pham, T.D.; Le, N.N.; Ha, N.T.; Nguyen, L.V.; Xia, J.; Yokoya, N.; To, T.T.; Trinh, H.X.; Kieu, L.Q.; Takeuchi, W. Estimating Mangrove Above-Ground Biomass Using Extreme Gradient Boosting Decision Trees Algorithm with Fused Sentinel-2 and ALOS-2 PALSAR-2 Data in Can Gio Biosphere Reserve, Vietnam. Remote Sens. 2020, 12, 777. [Google Scholar] [CrossRef] [Green Version]
- Pham, T.D.; Yokoya, N.; Xia, J.; Ha, N.T.; Le, N.N.; Nguyen, T.T.T.; Dao, T.H.; Vu, T.T.P.; Pham, T.D.; Takeuchi, W. Comparison of Machine Learning Methods for Estimating Mangrove Above-Ground Biomass Using Multiple Source Remote Sensing Data in the Red River Delta Biosphere Reserve, Vietnam. Remote Sens. 2020, 12, 1334. [Google Scholar] [CrossRef] [Green Version]
- Lou, I.; Xie, Z.; Ung, W.K.; Mok, K.M. Freshwater Algal Bloom Prediction by Extreme Learning Machine in Macau Storage Reservoirs. Neural Comput. Appl. 2016, 27, 19–26. [Google Scholar] [CrossRef]
- Maier, P.M.; Keller, S. Machine Learning Regression on Hyperspectral Data to Estimate Multiple Water Parameters. In Proceedings of the 2018 9th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Amsterdam, The Netherlands, 23–26 September 2018; IEEE: Amsterdam, The Netherlands, September 2018; pp. 1–5. [Google Scholar]
- Lee, Y.; Han, D.; Ahn, M.-H.; Im, J.; Lee, S.J. Retrieval of Total Precipitable Water from Himawari-8 AHI Data: A Comparison of Random Forest, Extreme Gradient Boosting, and Deep Neural Network. Remote Sens. 2019, 11, 1741. [Google Scholar] [CrossRef] [Green Version]
- Vanhellemont, Q. Adaptation of the Dark Spectrum Fitting Atmospheric Correction for Aquatic Applications of the Landsat and Sentinel-2 Archives. Remote Sens. Environ. 2019, 225, 175–192. [Google Scholar] [CrossRef]
- Karamizadeh, S.; Abdullah, S.M.; Halimi, M.; Shayan, J.; Rajabi, M.j. Advantage and Drawback of Support Vector Machine Functionality. In Proceedings of the 2014 International Conference on Computer, Communications, and Control Technology (I4CT), Langkawi, Malaysia, 2–4 September 2014; IEEE: Langkawi, Malaysia, 2014; pp. 63–65. [Google Scholar]
- Pham, T.D.; Yokoya, N.; Nguyen, T.T.T.; Le, N.N.; Ha, N.T.; Xia, J.; Takeuchi, W.; Pham, T.D. Improvement of Mangrove Soil Carbon Stocks Estimation in North Vietnam Using Sentinel-2 Data and Machine Learning Approach. GISci. Remote Sens. 2020, 58, 1–20. [Google Scholar] [CrossRef]
- Luo, M.; Wang, Y.; Xie, Y.; Zhou, L.; Qiao, J.; Qiu, S.; Sun, Y. Combination of Feature Selection and CatBoost for Prediction: The First Application to the Estimation of Aboveground Biomass. Forests 2021, 12, 216. [Google Scholar] [CrossRef]
- Dos Santos, V.M.; Matheson, F.E.; Pilditch, C.A.; Elger, A. Is Black Swan Grazing a Threat to Seagrass? Indications from an Observational Study in New Zealand. Aquat. Bot. 2012, 100, 41–50. [Google Scholar] [CrossRef]
- USGS Landsat 9. Available online: Https://Www.Usgs.Gov/Land-Resources/Nli/Landsat/Landsat-9 (accessed on 20 November 2019).
- Macreadie, P.I.; Anton, A.; Raven, J.A.; Beaumont, N.; Connolly, R.M.; Friess, D.A.; Kelleway, J.J.; Kennedy, H.; Kuwae, T.; Lavery, P.S.; et al. The Future of Blue Carbon Science. Nat. Commun. 2019, 10, 3998. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cussioli, M.C.; Bryan, K.R.; Pilditch, C.A.; de Lange, W.P.; Bischof, K. Light Penetration in a Temperate Meso-Tidal Lagoon: Implications for Seagrass Growth and Dredging in Tauranga Harbour, New Zealand. Ocean Coast. Manag. 2019, 174, 25–37. [Google Scholar] [CrossRef]






| Date of Acquisition (MM/DD/YYY) | Landsat Generation | Time of Acquisition a | Spatial Resolution (m) | Cloud Coverage (%) | First Low Tide b | Second Low Tide b |
|---|---|---|---|---|---|---|
| 4 April 1990 | Landsat 4 TM | 10:16 a.m. | 30 | 2 | 02:49 a.m. | 15:09 p.m. |
| 10 March 2001 | Landsat 7 ETM+ | 10:16 a.m. | 30 | 0 | 08:14 a.m. | 20:35 p.m. |
| 17 February 2011 | Landsat 5 TM | 10:15 a.m. | 30 | 2 | 06:33 a.m. | 18:57 p.m. |
| 6 March 2014 | Landsat 8 OLI | 10:15 a.m. | 30 | 0 | 11:41 a.m. c | |
| 23 May 2019 | Landsat 8 OLI | 10:15 a.m. | 30 | 0 | 04:14 a.m. | 16:29 p.m. |
| Landsat Image Acquisition | Nearest Aerial Image Acquisition | Aerial Image Spatial Resolution (m) | Google Earth Image (Year of Acquisition) |
|---|---|---|---|
| April 1990 | February 1991 March 1992 | 0.23 | December 1990 |
| March 2001 | February 2003 | 0.23 | December 2001 |
| February 2011 | February 2011 | 0.25 | |
| March 2014 | March 2014 | 0.125 |
| Model | Accuracy | Precision | Recall | F1 | Training Time (s) | Testing Time (s) |
|---|---|---|---|---|---|---|
| RF | 0.96 | 0.92 | 0.95 | 0.93 | 0.33 | 0.02 |
| CB | 0.97 | 0.94 | 0.96 | 0.95 | 3.71 | 0.006 |
| XGB | 0.96 | 0.93 | 0.94 | 0.93 | 0.15 | 0.004 |
| SVM | 0.94 | 0.89 | 0.92 | 0.91 | 0.04 | 0.02 |
| χ2 | p-Value | |
|---|---|---|
| CB–RF | 5.88 | 0.01 |
| CB–SVM | 19.11 | 0.00 |
| CB–XGB | 4.50 | 0.03 |
| XGB–RF | 0.00 | 1.00 |
| XGB–SVM | 8.20 | 0.00 |
| RF–SVM | 9.25 | 0.00 |
| Date Acquisition | Accuracy | Precision | Recall | F1 |
|---|---|---|---|---|
| 4 April 1990 | 0.97 | 0.98 | 0.98 | 0.98 |
| 10 March 2001 | 0.96 | 0.95 | 0.96 | 0.96 |
| 17 February 2011 | 0.97 | 0.98 | 0.96 | 0.97 |
| 6 March 2014 | 0.96 | 0.96 | 0.96 | 0.96 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ha, N.-T.; Manley-Harris, M.; Pham, T.-D.; Hawes, I. Detecting Multi-Decadal Changes in Seagrass Cover in Tauranga Harbour, New Zealand, Using Landsat Imagery and Boosting Ensemble Classification Techniques. ISPRS Int. J. Geo-Inf. 2021, 10, 371. https://doi.org/10.3390/ijgi10060371
Ha N-T, Manley-Harris M, Pham T-D, Hawes I. Detecting Multi-Decadal Changes in Seagrass Cover in Tauranga Harbour, New Zealand, Using Landsat Imagery and Boosting Ensemble Classification Techniques. ISPRS International Journal of Geo-Information. 2021; 10(6):371. https://doi.org/10.3390/ijgi10060371
Chicago/Turabian StyleHa, Nam-Thang, Merilyn Manley-Harris, Tien-Dat Pham, and Ian Hawes. 2021. "Detecting Multi-Decadal Changes in Seagrass Cover in Tauranga Harbour, New Zealand, Using Landsat Imagery and Boosting Ensemble Classification Techniques" ISPRS International Journal of Geo-Information 10, no. 6: 371. https://doi.org/10.3390/ijgi10060371
APA StyleHa, N. -T., Manley-Harris, M., Pham, T. -D., & Hawes, I. (2021). Detecting Multi-Decadal Changes in Seagrass Cover in Tauranga Harbour, New Zealand, Using Landsat Imagery and Boosting Ensemble Classification Techniques. ISPRS International Journal of Geo-Information, 10(6), 371. https://doi.org/10.3390/ijgi10060371