A Spectral Feature Based Convolutional Neural Network for Classification of Sea Surface Oil Spill



Abstract
:1. Introduction
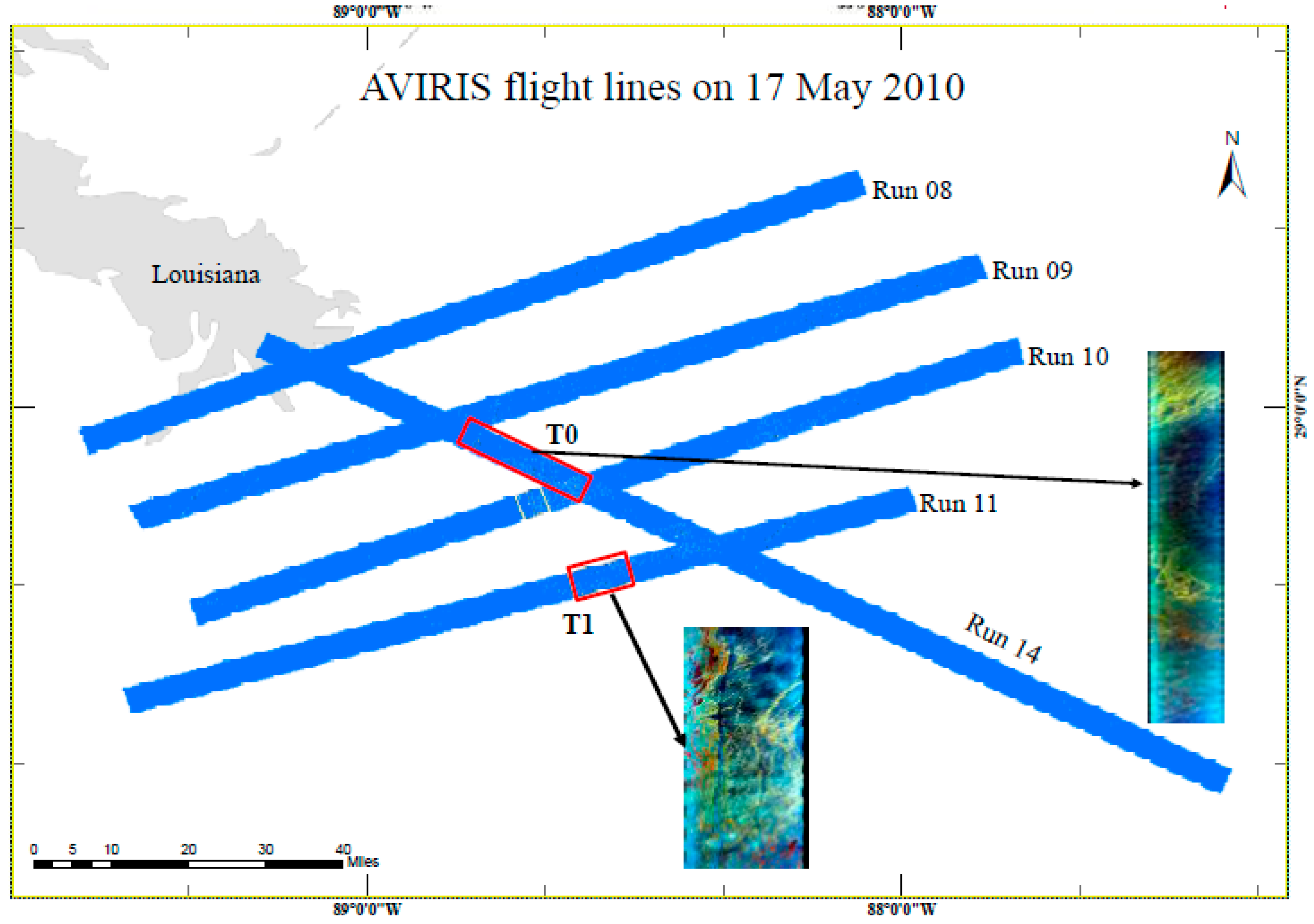
2. Data Sets
3. Methods
3.1. Overall Procedure
3.2. Data Pre-Processing
3.3. Feature Selection
3.4. Classifiers
4. Results and Discussion
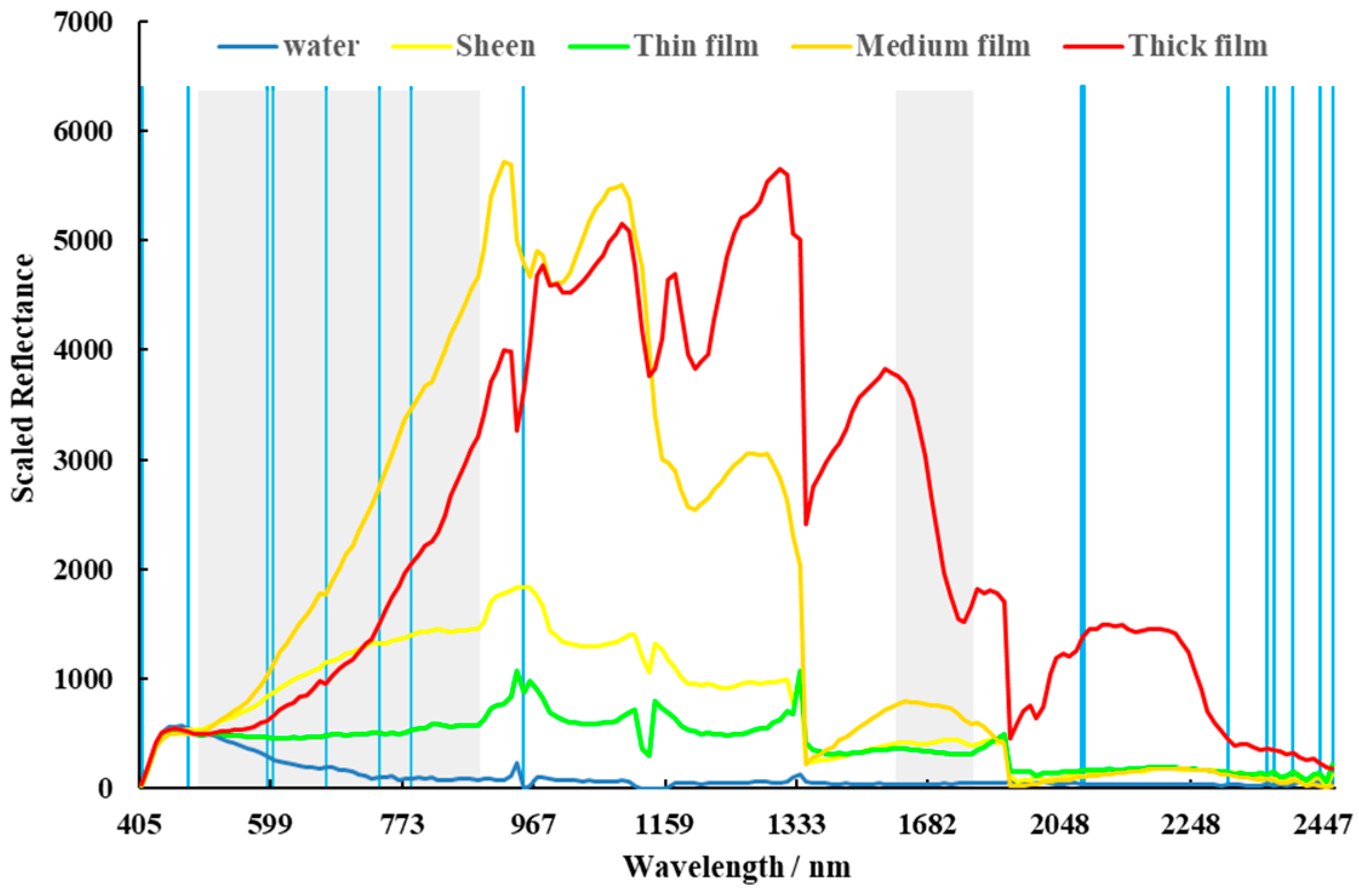
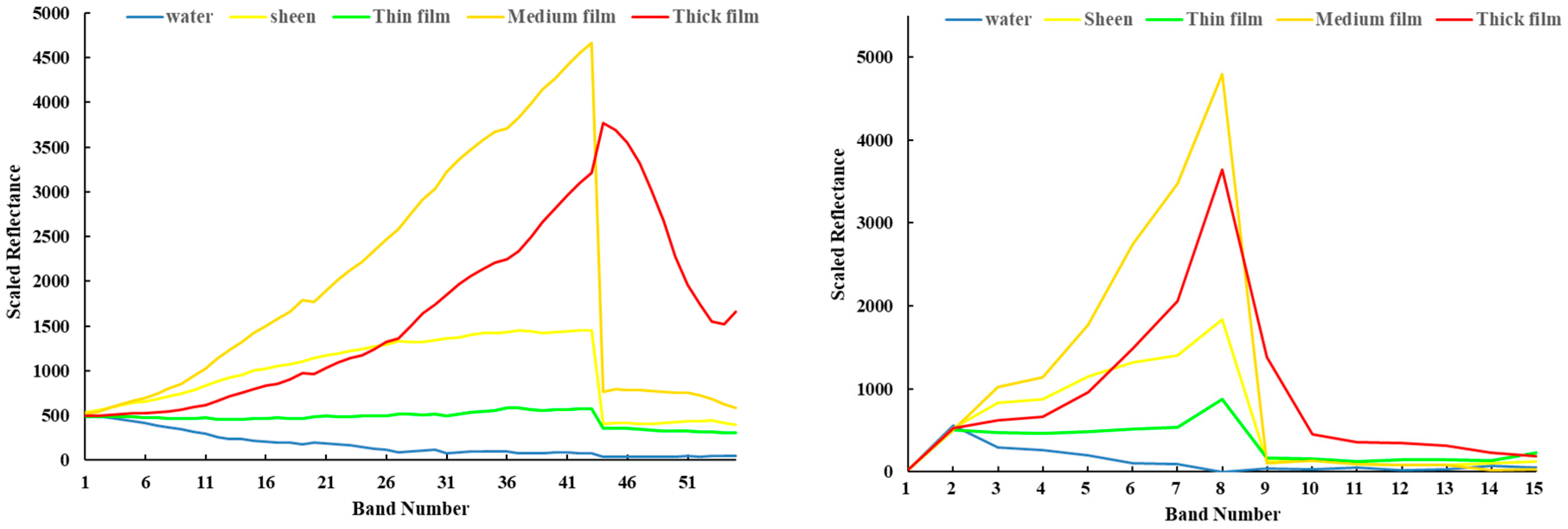
4.1. Feature Selection
4.2. Accuracy Comparisons Among the Models
4.3. Running Time Comparisons Among the Models
4.4. Case Studies
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fingas, M.; Brown, C. A Review of Oil Spill Remote Sensing. Sensors 2018, 18, 91. [Google Scholar] [CrossRef] [PubMed]
- Liu, B.; Li, Y.; Liu, C.; Xie, F.; Muller, J.-P. Hyperspectral Features of Oil-Polluted Sea Ice and the Response to the Contamination Area Fraction. Sensors 2018, 18, 234. [Google Scholar] [CrossRef] [PubMed]
- Cui, C.; Li, Y.; Liu, B.; Li, G. A new endmember preprocessing method for the hyperspectral unmixing of imagery containing marine oil spills. ISPRS Int. J. Geo-Inf. 2017, 6, 286. [Google Scholar] [CrossRef]
- Alves, T.M.; Kokinou, E.; Zodiatis, G.; Lardner, R. Deep-Sea Research II Hindcast, GIS and susceptibility modelling to assist oil spill clean-up and mitigation on the southern coast of Cyprus (Eastern Mediterranean). Deep Res. Part II 2015, 1980, 1–17. [Google Scholar] [CrossRef]
- Alves, T.M.; Kokinou, E.; Zodiatis, G. A three-step model to assess shoreline and offshore susceptibility to oil spills: The South Aegean (Crete) as an analogue for confined marine basins. Mar. Pollut. Bull. 2014. [Google Scholar] [CrossRef]
- Solberg, A.H.S.; Brekke, C.; Husøy, P.O. Oil spill detection in Radarsat and Envisat SAR images. IEEE Trans. Geosci. Remote Sens. 2007, 45, 746–754. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 9–23. [Google Scholar] [CrossRef] [PubMed]
- Hughes, G.F. On the Mean Accuracy of Statistical Pattern Recognizerss. IEEE Trans. Inf. Theory 1968, 14, 55–63. [Google Scholar] [CrossRef]
- Paoletti, M.E.; Haut, J.M.; Plaza, J.; Plaza, A. A new deep convolutional neural network for fast hyperspectral image classification. ISPRS J. Photogramm. Remote Sens. 2017. [Google Scholar] [CrossRef]
- Khodadadzadeh, M.; Member, S.; Li, J.; Plaza, A.; Member, S. Spectral—Spatial Classification of Hyperspectral Data Using Local and Global Probabilities for Mixed Pixel Characterization. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6298–6314. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăgu, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Guo, H.; Wu, D.; An, J. Discrimination of oil slicks and lookalikes in polarimetric SAR images using CNN. Sensors 2017, 17, 1837. [Google Scholar] [CrossRef]
- Guidici, D.; Clark, M. One-Dimensional Convolutional Neural Network Land-Cover Classification of Multi-Seasonal Hyperspectral Imagery in the San Francisco Bay Area, California. Remote Sens. 2017, 9, 629. [Google Scholar] [CrossRef]
- Makantasis, K.; Karantzalos, K.; Doulamis, A.; Doulamis, N. Deep supervised learning for hyperspectral data classification through convolutional neural networks. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 4959–4962. [Google Scholar] [CrossRef]
- Liang, H.; Li, Q. Hyperspectral imagery classification using sparse representations of convolutional neural network features. Remote Sens. 2016, 8, 99. [Google Scholar] [CrossRef]
- Vetrivel, A.; Gerke, M.; Kerle, N.; Nex, F.; Vosselman, G. Disaster damage detection through synergistic use of deep learning and 3D point cloud features derived from very high resolution oblique aerial images, and multiple-kernel-learning. ISPRS J. Photogramm. Remote Sens. 2018. [Google Scholar] [CrossRef]
- Kussul, N.; Lavreniuk, M.; Skakun, S.; Shelestov, A. Deep Learning Classification of Land Cover and Crop Types Using Remote Sensing Data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 778–782. [Google Scholar] [CrossRef]
- Chen, Y.; Jiang, H.; Li, C.; Jia, X.; Ghamisi, P. Deep feature sextraction and classification of hyperspectral images based on convolutional neural networks. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6232–6251. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Shen, Q. Spectral–spatial classification of hyperspectral imagery with 3D convolutional neural network. Remote Sens. 2017, 9, 67. [Google Scholar] [CrossRef]
- Chen, G.; Li, Y.; Sun, G.; Zhang, Y. Application of Deep Networks to Oil Spill Detection Using Polarimetric Synthetic Aperture Radar Images. Appl. Sci. 2017, 7, 968. [Google Scholar] [CrossRef]
- Fisher, P. The pixel: A snare and a delusion. Int. J. Remote Sens. 1997, 18, 679–685. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Kumar, V. Deep learning for Remote Sensing Data. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Ghamisi, P.; Plaza, J.; Chen, Y.; Li, J.; Plaza, A.J. Advanced Spectral Classifiers for Hyperspectral Images: A review. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–32. [Google Scholar] [CrossRef]
- Hu, W.; Huang, Y.; Wei, L.; Zhang, F.; Li, H. Deep convolutional neural networks for hyperspectral image classification. J. Sens. 2015, 2015, 258619. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. 1 ImageNet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012. [Google Scholar] [CrossRef]
- Mei, S.; Ji, J.; Hou, J.; Li, X.; Du, Q. Learning Sensor-Specific Spatial-Spectral Features of Hyperspectral Images via Convolutional Neural Networks. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4520–4533. [Google Scholar] [CrossRef]
- Nieto-Hidalgo, M.; Gallego, A.J.; Gil, P.; Pertusa, A. Two-stage convolutional neural network for ship and spill detection using SLAR images. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5217–5230. [Google Scholar] [CrossRef]
- Joye, S.B.; MacDonald, I.R.; Leifer, I.; Asper, V. Magnitude and oxidation potential of hydrocarbon gases released from the BP oil well blowout. Nat. Geosci. 2011, 4, 160–164. [Google Scholar] [CrossRef]
- Svejkovsky, J.; Lehr, W.; Muskat, J.; Graettinger, G.; Mullin, J. Operational utilization of aerial multispectral remote sensing during oil spill response: Lessons learned during the Deepwater Horizon (MC-252) spill. Photogramm. Eng. Remote Sens. 2012, 78, 1089–1102. [Google Scholar] [CrossRef]
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the art satellite and airborne marine oil spill remote sensing: Application to the BP Deepwater Horizon oil spill. Remote Sens. Environ. 2012, 124, 185–209. [Google Scholar] [CrossRef] [Green Version]
- Clark, B.R.N.; Swayze, G.A.; Leifer, I.; Livo, K.E.; Kokaly, R.; Hoefen, T.; Lundeen, S.; Eastwood, M.; Green, R.O.; Pearson, N.; et al. A Method for Quantitative Mapping of Thick Oil Spills Using Imaging Spectroscopy; US Geological Survey: Tucson, AZ, USA, 2010.
- Liu, B.; Li, Y.; Chen, P.; Zhu, X. Extraction of Oil Spill Information Using Decision Tree Based Minimum Noise Fraction Transform. J. Indian Soc. Remote Sens. 2016, 44. [Google Scholar] [CrossRef]
- Green, R.O.; Eastwood, M.L.; Sarture, C.M.; Chrien, T.G.; Aronsson, M.; Chippendale, B.J.; Faust, J.A.; Pavri, B.E.; Chovit, C.J.; Solis, M. Imaging spectroscopy and the airborne visible/infrared imaging spectrometer (AVIRIS). Remote Sens. Environ. 1998, 65, 227–248. [Google Scholar] [CrossRef]
- Bonn Agreement. Bonn Agreement Aerial Operations Handbook; Bonn Agreement Secretariat: London, UK, 2017. [Google Scholar]
- Zhao, D.; Cheng, X.; Zhang, H.; Niu, Y.; Qi, Y. Evaluation of the Ability of Spectral Indices of Hydrocarbons and Seawater for Identifying Oil Slicks Utilizing Hyperspectral Images. Remote Sens. 2018, 10, 421. [Google Scholar] [CrossRef]
- Carranza-García, M.; García-Gutiérrez, J.; Riquelme, J. A Framework for Evaluating Land Use and Land Cover Classification Using Convolutional Neural Networks. Remote Sens. 2019, 11, 274. [Google Scholar] [CrossRef]
- Alparone, L.; Selva, M.; Aiazzi, B.; Baronti, S.; Butera, F.; Chiarantini, L. Signal-dependent noise modelling and estimation of new-generation imaging spectrometers. In Proceedings of the WHISPERS ’09—1st Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing, Grenoble, France, 26–28 August 2009; pp. 1–4. [Google Scholar]
- Acquarelli, J.; Marchiori, E.; Buydens, L.M.C.; Tran, T.; van Laarhoven, T. Spectral-spatial classification of hyperspectral images: Three tricks and a new learning setting. Remote Sens. 2018, 10, 1156. [Google Scholar] [CrossRef]
- Pal, M.; Foody, G.M. Feature selection for classification of hyperspectral data by SVM. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2297–2307. [Google Scholar] [CrossRef]
- Loos, E.; Brown, L.; Borstad, G.; Mudge, T.; Álvarez, M. Characterization of Oil Slicks at Sea Using Remote Sensing Techniques. In Proceedings of the OCEANS, Yeosu, Korea, 21–24 May 2012. [Google Scholar]
- Kühn, F.; Oppermann, K.; Hörig, B. Hydrocarbon index—An algorithm for hyperspectral detection of hydrocarbons. Int. J. Remote Sens. 2004, 25, 2467–2473. [Google Scholar] [CrossRef]
- Lu, Y.; Tian, Q.; Qi, X.; Wang, J.; Wang, X. Spectral response analysis of offshore thin oil slicks. Spectrosc. Spectr. Anal. 2009, 29, 986–989. [Google Scholar]
- Liu, B.; Li, Y.; Zhang, Q.; Han, L. Assessing Sensitivity of Hyperspectral Sensor to Detect Oils with Sea Ice. J. Spectrosc. 2016, 2016, 1–9. [Google Scholar] [CrossRef]
- Peng, H.; Long, F.; Ding, C. Feature selection based on mutual information: Criteria of Max-Dependency, Max-Relevance, and Min-Redundancy. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1226–1238. [Google Scholar] [CrossRef] [PubMed]
- Ding, C.; Peng, H. Minimum Redundancy Feature Selection from Microarray Gene Expression Data. J. Bioinform. Comput. Biol. 2005, 3, 523–528. [Google Scholar] [CrossRef]
- Su, J.; Yi, D.; Liu, C.; Guo, L.; Chen, W.H. Dimension reduction aided hyperspectral image classification with a small-sized training dataset: Experimental comparisons. Sensors (Switzerland) 2017, 17, 2726. [Google Scholar] [CrossRef] [PubMed]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Zhao, C.; Wan, X.; Zhao, G.; Yan, Y. Spectral–spatial classification of hyperspectral images using trilateral filter and stacked sparse autoencoder. J. Appl. Remote Sens. 2017, 11, 016033. [Google Scholar] [CrossRef]
- Pedregosa, F.; Weiss, R.; Brucher, M. Scikit-learn Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar] [CrossRef]
- Zhao, W.; Du, S. Spectral-Spatial Feature Extraction for Hyperspectral Image Classification: A Dimension Reduction and Deep Learning Approach. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4544–4554. [Google Scholar] [CrossRef]
- Ball, J.E.; Anderson, D.T.; Chan, C.S. A Comprehensive Survey of Deep Learning in Remote Sensing: Theories, Tools and Challenges for the Community. J. Appl. Remote Sens. 2017, 11, 042609. [Google Scholar] [CrossRef]
- Ammour, N.; Alhichri, H.; Bazi, Y.; Benjdira, B.; Alajlan, N.; Zuair, M. Deep learning approach for car detection in UAV imagery. Remote Sens. 2017, 9, 312. [Google Scholar] [CrossRef]
- Fukunaga, K. Introduction to Statistical Pattern Recognition, 2nd ed.; Academic Press: New York, NY, USA, 1990. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bonn Agreement Classes | This Study | |||
|---|---|---|---|---|
| Code | Description/Appearance | Layer Thickness/μm | Class | Layer Thickness/μm |
| 1 | 0 (sea water) | |||
| 1 | Sheen | 0.04–0.3 | ||
| 2 | Rainbow | 0.3–5.0 | ||
| 3 | Metallic | 5.0–50 | 2 | <50 (sheen) |
| 4 | Discontinuous true color | 50–200 | 3 | 50–100 (thin film) |
| 4 | 100–200 (medium film) | |||
| 5 | Continuous true color | >200 | 5 | >200 (thick film) |
| Water | Sheen | Thin | Medium | Thick | ||
|---|---|---|---|---|---|---|
| All Bands | Water | / | 2.00000 | 2.00000 | 2.00000 | 2.00000 |
| Sheen | 2.00000 | / | 1.99977 | 2.00000 | 2.00000 | |
| Thin | 2.00000 | 1.99977 | / | 2.00000 | 2.00000 | |
| Medium | 2.00000 | 2.00000 | 2.00000 | / | 1.99996 | |
| Thick | 2.00000 | 2.00000 | 2.00000 | 1.99996 | / | |
| SIs Selected Bands | Water | / | 2.00000 | 2.00000 | 2.00000 | 2.00000 |
| Sheen | 2.00000 | / | 1.99778 | 2.00000 | 2.00000 | |
| Thin | 2.00000 | 1.99778 | / | 1.99891 | 2.00000 | |
| Medium | 2.00000 | 2.00000 | 1.99891 | / | 1.99996 | |
| Thick | 2.00000 | 2.00000 | 2.00000 | 1.99996 | / | |
| mRMR Selected Bands | Water | / | 1.99506 | 1.99757 | 2.00000 | 2.00000 |
| Sheen | 1.99506 | / | 1.89845 | 1.99747 | 1.99964 | |
| Thin | 1.99757 | 1.89845 | / | 1.99999 | 1.99814 | |
| Medium | 2.00000 | 1.99747 | 1.99999 | / | 1.97672 | |
| Thick | 2.00000 | 1.99964 | 1.99814 | 1.97672 | / |
| Sample Distribution | Class | Water | Sheen | Thin Film | Medium Film | Thick Film | OA | Kappa |
|---|---|---|---|---|---|---|---|---|
| Samples | 32405 | 7443 | 2343 | 274 | 211 | |||
| PA | All bands+1D CNN | 89.62% | 60.43% | 61.70% | 59.12% | 57.08% | 82.62% | 0.5732 |
| SIs+1D CNN | 90.43% | 65.42% | 68.01% | 63.14% | 72.99% | 84.57% | 0.6259 | |
| mRMR+1D CNN | 88.88% | 61.91% | 68.09% | 62.41% | 52.61% | 82.68% | 0.5796 | |
| All bands+RF | 87.18% | 52.16% | 70.76% | 62.04% | 56.40% | 79.86% | 0.5095 | |
| SIs+RF | 86.13% | 57.01% | 77.80% | 64.60% | 59.24% | 80.31% | 0.5169 | |
| All bands+SVM | 86.83% | 57.14% | 66.41% | 70.44% | 67.30% | 80.33% | 0.5345 | |
| SIs+SVM | 89.94% | 42.34% | 81.65% | 54.74% | 69.19% | 80.86% | 0.5221 | |
| All bands+HU | 88.09% | 63.12% | 73.58% | 54.74% | 63.03% | 82.60% | 0.5832 | |
| SIs+HU | 89.11% | 64.21% | 72.86% | 43.43% | 62.56% | 83.45% | 0.5996 |
| Sample Training Time/min | Sample Validation Time/min | Prediction Time/min | |
|---|---|---|---|
| All bands+1D CNN | 15.816 ± 0.150 | 2.761 ± 0.011 | 5.732 ± 0.023 |
| SIs+1D CNN | 7.452 ± 0.071 | 2.012 ± 0.010 | 3.893 ± 0.021 |
| mRMR+1D CNN | 4.468 ± 0.053 | 1.732 ± 0.004 | 2.892 ± 0.022 |
| All bands+RF | 19.238 ± 0.127 | 3.401 ± 0.019 | 7.642 ± 0.018 |
| SIs+RF | 6.919 ± 0.029 | 2.174 ± 0.017 | 5.964 ± 0.011 |
| All bands+SVM | 12.174 ± 0.272 | 2.417 ± 0.034 | 4.724 ± 0.009 |
| SIs+SVM | 6.102 ± 0.077 | 1.936 ± 0.018 | 3.368 ± 0.026 |
| All bands+HU | 13.112 ± 0.217 | 2.382 ± 0.082 | 4.836 ± 0.013 |
| SIs+HU | 5.766 ± 0.026 | 1.103 ± 0.004 | 3.062 ± 0.028 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Li, Y.; Li, G.; Liu, A. A Spectral Feature Based Convolutional Neural Network for Classification of Sea Surface Oil Spill. ISPRS Int. J. Geo-Inf. 2019, 8, 160. https://doi.org/10.3390/ijgi8040160
Liu B, Li Y, Li G, Liu A. A Spectral Feature Based Convolutional Neural Network for Classification of Sea Surface Oil Spill. ISPRS International Journal of Geo-Information. 2019; 8(4):160. https://doi.org/10.3390/ijgi8040160
Chicago/Turabian StyleLiu, Bingxin, Ying Li, Guannan Li, and Anling Liu. 2019. "A Spectral Feature Based Convolutional Neural Network for Classification of Sea Surface Oil Spill" ISPRS International Journal of Geo-Information 8, no. 4: 160. https://doi.org/10.3390/ijgi8040160
APA StyleLiu, B., Li, Y., Li, G., & Liu, A. (2019). A Spectral Feature Based Convolutional Neural Network for Classification of Sea Surface Oil Spill. ISPRS International Journal of Geo-Information, 8(4), 160. https://doi.org/10.3390/ijgi8040160