1. Introduction
As indoor activities become increasingly diversified, newly constructed buildings have become larger and more complex. This structural complexity challenges efficient management of the various indoor facilities and hinders effective disaster responses. Therefore, sufficient information regarding indoor spaces is essential for many purposes [
1,
2], and changes in the indoor environment are causing an increase in demand for services such as indoor navigation.
The mobility of people with disabilities (PWD) is a challenging and important social issue. For PWD, indoor spaces are obstructed by objects such as walls, doors, and stairs, unlike outdoor spaces, where the limitations are based on geographical distances [
1]. Such characteristics of indoor spaces can cause great difficulty for the free movement of PWD indoors. Therefore, services such as indoor guidance systems must be developed with PWD-specific indoor information, including obstacles, and this information is missing from common navigation systems. However, indoor assistive technologies for PWD are paradoxically restricted to use in indoor environments [
3]. The absence of suitable representations of the geometric and semantic information of indoor environments hinders the practical application of existing models of these spaces [
4]. Therefore, effective PWD-related services require the construction of an indoor model that includes sufficient information on PWD mobility.
The construction of a suitable indoor model for PWD requires a standardized data model. Standardized data models are useful for applications with particular purposes, such as voice guidance systems, and the sharing of data sets created using standardized data models frees service developers from defining new data models or creating separate data sets for each type of application [
5]. Thus, standardized data models offer substantial benefits, including low management costs and capability to easily share data for PWD-related services.
In this context, this study aimed to develop an extended data model to support indoor navigation for PWD by defining the relevant features and relations of PWD mobility in indoor environments. To support route planning that accounts for obstacle information, data models are newly designed based on the IndoorGML application. There are differences in the constraints and considerations involving navigation by people with mobility impairments and by those with visual impairments. Therefore, in this study, by specifically focusing on people with mobility impairments, various types of rooms, facilities, and building installations are defined as features, and the accessibility of these features to people with mobility disabilities is examined by analyzing the geometric and topological information of each feature. A data model consisting of those features is then constructed with the corresponding accessibility information. This enables the structuring of indoor space information in terms of PWD mobility. In addition, the data model is based on the IndoorGML, standard for indoor space, and the data sets generated using this model can be shared and exchanged between various applications easily. Therefore, as an IndoorGML extension, the model can be easily used for many services.
The remainder of this paper is organized as follows.
Section 2 reviews previous studies on indoor space models, including the relevant data models, as an overview of broad research trends in this field.
Section 3 presents an extended data model for the people with mobility disabilities indoor navigation module.
Section 4 outlines the process of data generation by applying the proposed model to a shopping mall, and analyzes the results of path planning for different scenarios. Finally,
Section 5 draws conclusions from the implementation results and provides suggestions for future works.
2. Related Works
Indoor spatial information is increasingly required in a variety of applications such as risk analysis, trajectory identification, and building management [
6], and studies in the field of modeling the indoor environment have been conducted. These can be divided into three categories: (1) conceptualizing and standardizing the indoor environment with a data model, (2) analysis of indoor models and the spatial data they use, and (3) applications of indoor space models.
Studies of indoor data models focus on conceptualizing, standardizing, and expressing the various spaces constituting the indoor environment and their relationships [
4,
5,
7,
8,
9,
10,
11,
12,
13], as well as adapting and tailoring existing data models to the needs of application services [
6]. Two kinds of models can be created: (1) generalized indoor models for broad classes of users; (2) models for specific purposes. Many studies have performed modeling based on indoor space standards; these models include CityGML, IndoorGML, and the spatial information model defined in ISO19107 [
5,
8,
10,
13,
14,
15,
16,
17].
The “IndoorGML core module” consists of basic modeling components, whereas the “IndoorGML navigation module” refers to an extension of the core module. This navigation module is based on an open data model for indoor spatial information and IndoorGML, the Open Geospatial Consortium (OGC) standard for XML schema. Unlike object-based CityGML, IndoorGML represents indoor spaces as constrained, semantic spaces, and models based on IndoorGML are thus more suitable for expressing the connectivity of various indoor spaces [
1,
2]. In [
8], a space classification model is proposed that considers both the semantic and geometric characteristics of the space in the ontology of indoor space. The effectiveness of this model was demonstrated by designing an IndoorGML extension using proposed classes, including syntactic and semantic components. However, the semantic information in that data model is too general for use in PWD-related services. In [
10], an extension of the IndoorGML core module was proposed to incorporate semantic information because the IndoorGML structure at that time did not support semantic information storage. In addition, Kim et al. [
9] developed the Indoor Spatial Data Model (ISDM) to support the construction of spatial information that can be used for complex indoor location-based services with topology information. ISDM defines additional feature classes to represent indoor spaces on the CityGML application domain extension-Application Domain Extension (ADE)-based feature model and the IndoorGML-based topology model. Isikdag et al. [
4] proposed a BIM-oriented model for converting an original BIM into a building-oriented indoor data model for indoor navigation. The proposed model was tested on an emergency response scenario, and the authors reported that the use of indoor space models is limited because of a lack of “appropriate and applicable” geometric and semantic information.
To address these limitations, studies have also been conducted on indoor data models for specific users, such as visually impaired people or people with wheelchairs (PWW) [
5,
7,
18]. Iida et al. [
5] proposed landmark-conscious voice navigation, whereby a data structure for describing landmark information is used as an extension of IndoorGML 1.0 with newly defined spaces. However, although they defined a standardized data model that includes landmark information, the model’s design was not detailed, and constraints related to movement were not fully reflected because the method was an extension of a voice navigation system. Liu and Zlatanova [
18] constructed an indoor navigation space model (INSM) that automatically generates connectivity graphs for buildings using semantic information and defines various types of building spaces, including obstacles, which are inaccessible to pedestrians. Li et al. [
7] used a combination of geometric, topological, and semantic layers to compensate for the defects of other hybrid models, and proposed an indoor space dimensional model that supports barrier-free path-finding. They also proposed a process for building an indoor space model by extracting elements and subspaces using floor plans as source data and establishing spatial relations. However, they considered PWD accessibility via a Boolean operation in the semantic layer rather than as a range of accessibility based on specific properties of the objects, and limited PWW-specific information to door accessibility. Thus, effective consideration of the actual indoor spatial services available for PWD requires much more detailed feature modeling.
In the field of indoor space model data analysis, studies have been conducted to analyze connectivity, accessibility, and visibility between spaces, focusing on the characteristics of indoor spaces along with the development of data models. Connectivity analysis includes themes such as topology creation and subspacing, whereas accessibility analysis includes defining accessibility and walkability indices. In terms of PWD services, accessibility information for each space is very significant [
19], and connectivity between spaces should be configured on the basis of spaces and objects through which PWD can pass. In this field, Karimi and Ghafourian [
20] presented a new technique for path navigation that meets user’s special needs and preferences based on the Americans with Disabilities Act (ADA) [
21]. They defined “specific users with special needs” as people who are visually impaired, mobility-impaired, cognitively impaired, or elderly, and proposed two algorithms for calculating the corridor network and for accessible path navigation. Subsequently, they used a self-defined hallway network with a simple structure as a test set to verify their proposed algorithms. However, owing to lack of a standardized indoor model, the use and sharing of the data and algorithms they presented is limited. Hashemi and Karimi [
22] conducted indoor accessibility analysis focused on egressibility, referring to the effort required to reach the building entrance. They defined elements that affect accessibility, generated graphs by modeling the elements, designed an accessibility index for each element, and developed a PWD evacuation routing algorithm. However, they did not use a standardized indoor model and was concerned only with improving the index. In a similar approach, Hashemi [
23] proposed an accessibility index for routing analysis with additional criteria for searching accessible routes for PWW in emergency evacuations. Further, Shin and Lee [
24] developed an evaluation framework for indoor design to simplify complex design problems by focusing on the walkability of building circulation in the BIM environment. They conducted indoor analysis of space units, but stated that analysis of object (feature) units was also needed because of the many variables in the indoor environment.
Studies of indoor model applications have typically focused on automation of data construction or certain navigation themes, such as integrating indoor and outdoor environments for specific purposes such as evacuation. Wang and Niu [
25] discussed a data model that represents horizontal and vertical indoor components using OpenStreetMap primitives (nodes, ways, relations) and tags. They then presented a workflow that enables automatic generation of routing graphs based on the proposed data model, in conjunction with an algorithm for calculating indoor and outdoor paths. However, their research targeted ordinary people, and is therefore insufficient for PWD applications. Furthermore, the approach offers only limited expandability because of the particular data structure of OpenStreetMap that was used as the base. Several studies on path finding for users with special needs, such as PWD, have also been conducted [
26,
27,
28,
29,
30]. The studies conducted predominantly dealt with indoor models that include obstacle information for mobility-impaired people. However, although many studies related to indoor model applications—such as proposal of path finding algorithms—have been conducted, they have been restricted to widespread use of research results without any integrated and standardized model.
Table 1 summarizes the key findings of the relevant studies. In summary, a number of previous studies have focused on developing accessibility analysis methods and routing algorithms related to the indoor movement of people with mobility disabilities. Among studies on indoor space modeling, existing models cannot be applied to indoor navigation for people with mobility disabilities because the existing models do not include detailed information on mobility constraints. To develop effective services or systems that consider the needs and preferences of people with mobility disabilities, indoor models and data sets should be shared through a standardized data model that considers PWD mobility. Therefore, in this study, we propose an indoor data model for people with mobility disabilities that includes more features and points of interest (POIs) based on the standard for indoor spaces.
4. Scenario-Based Implementation of Lotte World Shopping Mall
To verify the effectiveness of the proposed model, we chose the Lotte World Shopping Mall in Seoul as the test building upon which the model will be applied. This shopping mall is a multi-floor building with a complex structure that includes many vertical connections and differs in the outer shape of each floor. The building comprises a basement and six upper floors, with each floor connected to the subsequent floor via stairs, elevators, and escalators. It is suitable for testing because plenty of relevant spaces such as toilets for PWD and wheelchair rental shops exist on each floor. In addition, proper multi-floor building data can be constructed as it is easy to obtain guidance map images for floors; moreover, the related features and their characteristics are well represented in those map images. The PWD data model from
Section 3 was implemented using the ArcGIS geodatabase. The Navigable Space, Indoor Installation, and Opening Boundary for PWD features in the extension were implemented to validate the proposed model for application to indoor navigation services for people with mobility disabilities. The functional information relevant to the Indoor Installations and Navigable Spaces were stored with attribute types in the geodatabase. Using the guide map image, an indoor geodatabase with states and transitions was created according to the rules shown in
Table 3, and the factors presented in
Section 3.2 were generated as attributes. As mentioned earlier, the attributes of the PWD features were designed based on the relevant factors that were derived in
Section 3.2.2, and most of the factors, such as shape, size, and slope, represent the geometric characteristics of actual spaces and features. Therefore, when searching for feasible paths using the constructed network data based on the proposed data model, the actual shapes of the features and spaces can be considered by using the attribute information. “Accessibility,” which is one of the attributes, was assigned the Boolean values of either accessible (T) or inaccessible (F), depending on the various factors that are stored in the form of the attribute for each feature, to simplify the computation during path planning.
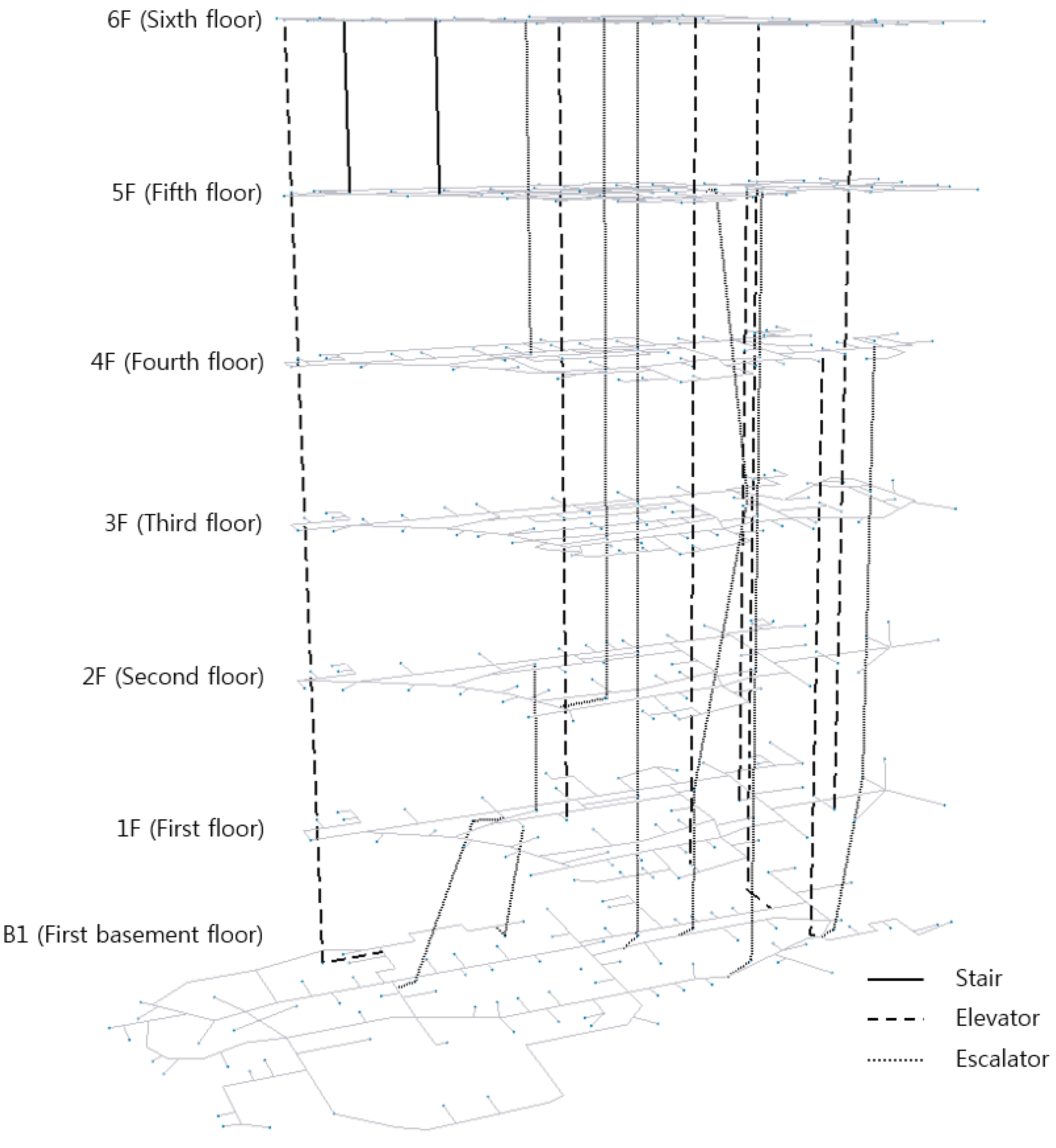
Figure 6 shows the result of the 3D visualization of the generated datasets for the Lotte World Shopping Mall. The connected links for vertical movement among the generated transitions are highlighted using different type of lines (bold line, dash line, and dotted line). The first basement floor has a larger size than the other floors, and as shown in
Figure 6, it extends more toward the left side when compared to the outermost extreme of the left side of first floor. The significant factors that determine the accessibility of horizontal transitions, as described by the data model, are the width and slope of the corridor or the existence of a raised spot on it. The corridors of the test building consist of a horizontal path with sufficient width and without any slope. In addition, the
PWDdoors of the spaces are always open or are opened automatically owing to the nature of the shopping mall. Therefore, almost every transition with regard to horizontal travel is accessible except the transitions that are connected only to the inaccessible states. However, for vertical travel, transitions that represent connections between floors via stairs and escalators without any aids such as wheelchair lifts are inaccessible. In addition, the states for stairs and escalators as
PWDIndoorInstallation are inaccessible as well, whereas elevators with ample car and entrance sizes are accessible states and transitions for the vertical movement. It is noted that the mall includes an escalator called the “express escalator” that connects two floors at once.
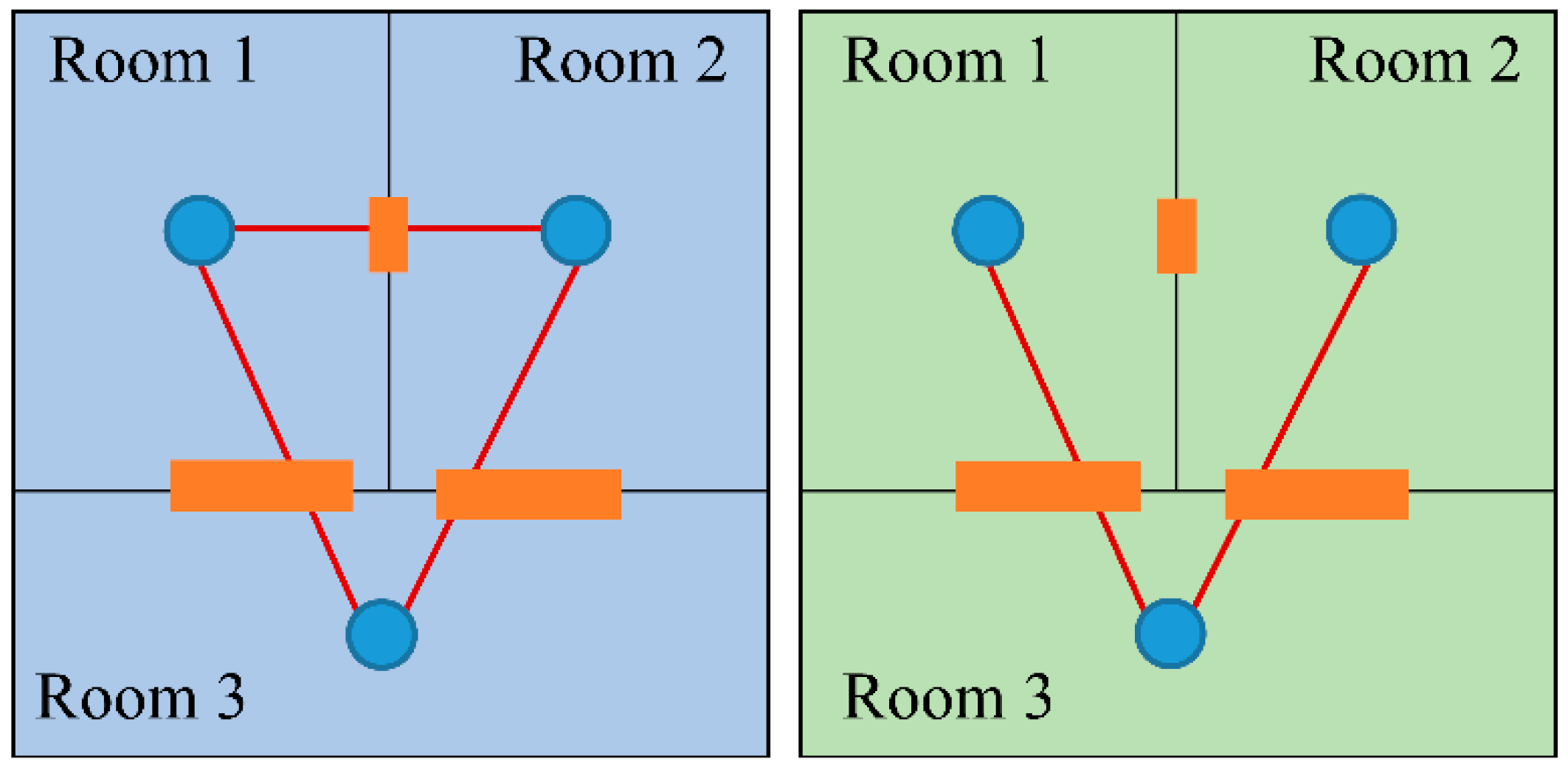
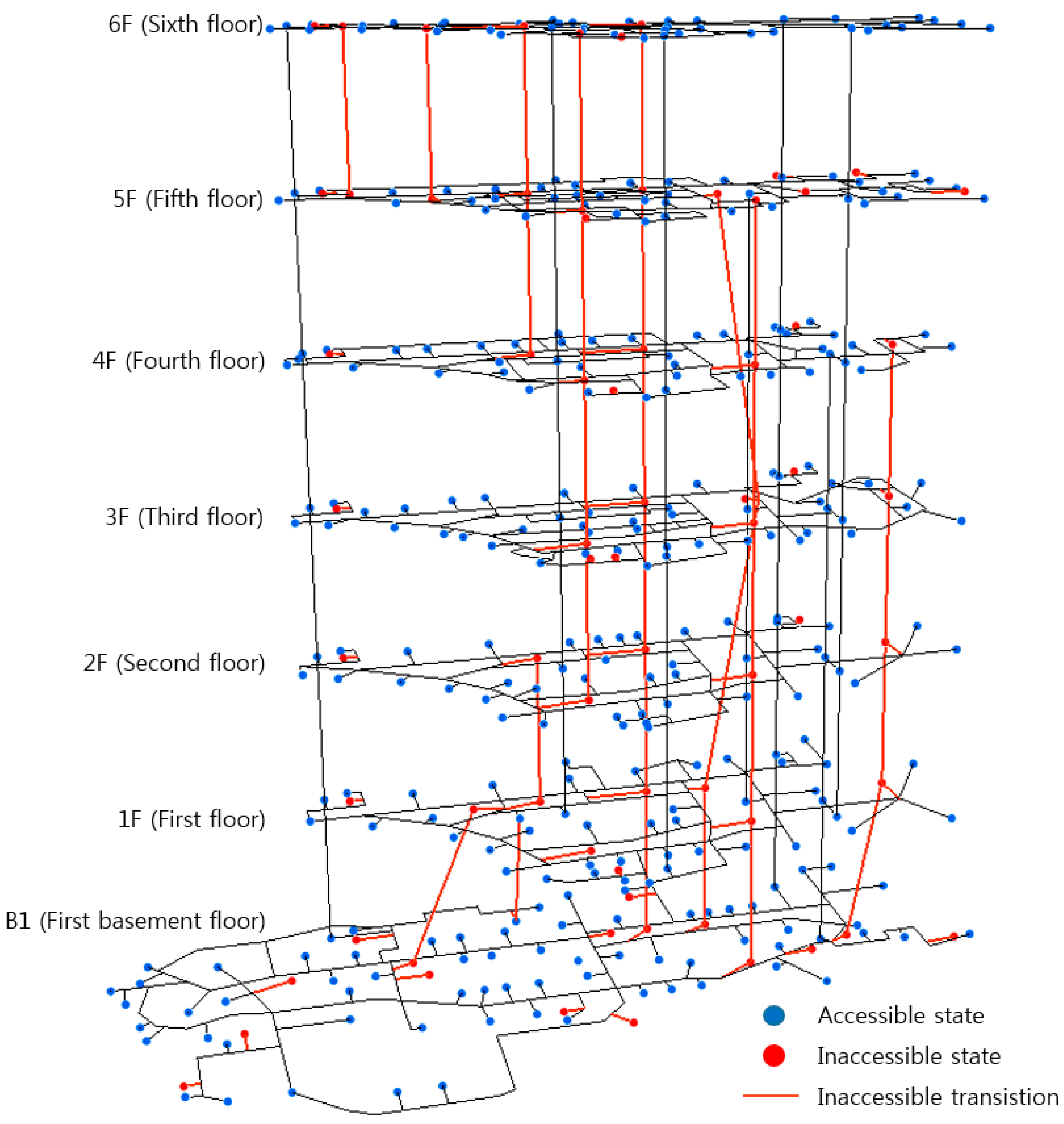
Figure 7 shows the accessibilities of the elements of the test building based on the prior knowledge of that shopping mall obtained via on-site experiences and the POI information included in the guidance map. The mobility aids rental shops and toilets for PWD can be represented as
PWDRooms. In
Figure 7, inaccessible vertical transitions are expressed with red solid lines, and the accessibility of states is represented with colored circles.
Two cases were tested using the data generated by the proposed model: (1) route planning within a single floor and (2) route planning involving multi-floor movement. For each case, we randomly selected a starting point and an arrival point to calculate the shortest path using the Dijkstra algorithm and then confirmed whether the extracted path reflects inaccessible elements for people with mobility disabilities. Specifically, similar to ONALIN-FN [
20], which is used to extract feasible network, we assigned an infinite cost to inaccessible elements. Then, we applied the Dijkstra algorithm to find the optimal route for people with mobility disabilities. The path computed with the Dijkstra algorithm could be considered optimal under two assumptions: (1) the shortest path among the accessible nodes and links will be selected, and (2) the travel times required to use the stairs, escalators, and elevators are equivalent. Then, we confirmed whether the extracted path reflects inaccessible elements for people with mobility disabilities.
4.1. Case 1: Single-Floor Navigation
The first basement level (B1) data with various PWD features was chosen for indoor navigation within a single floor.
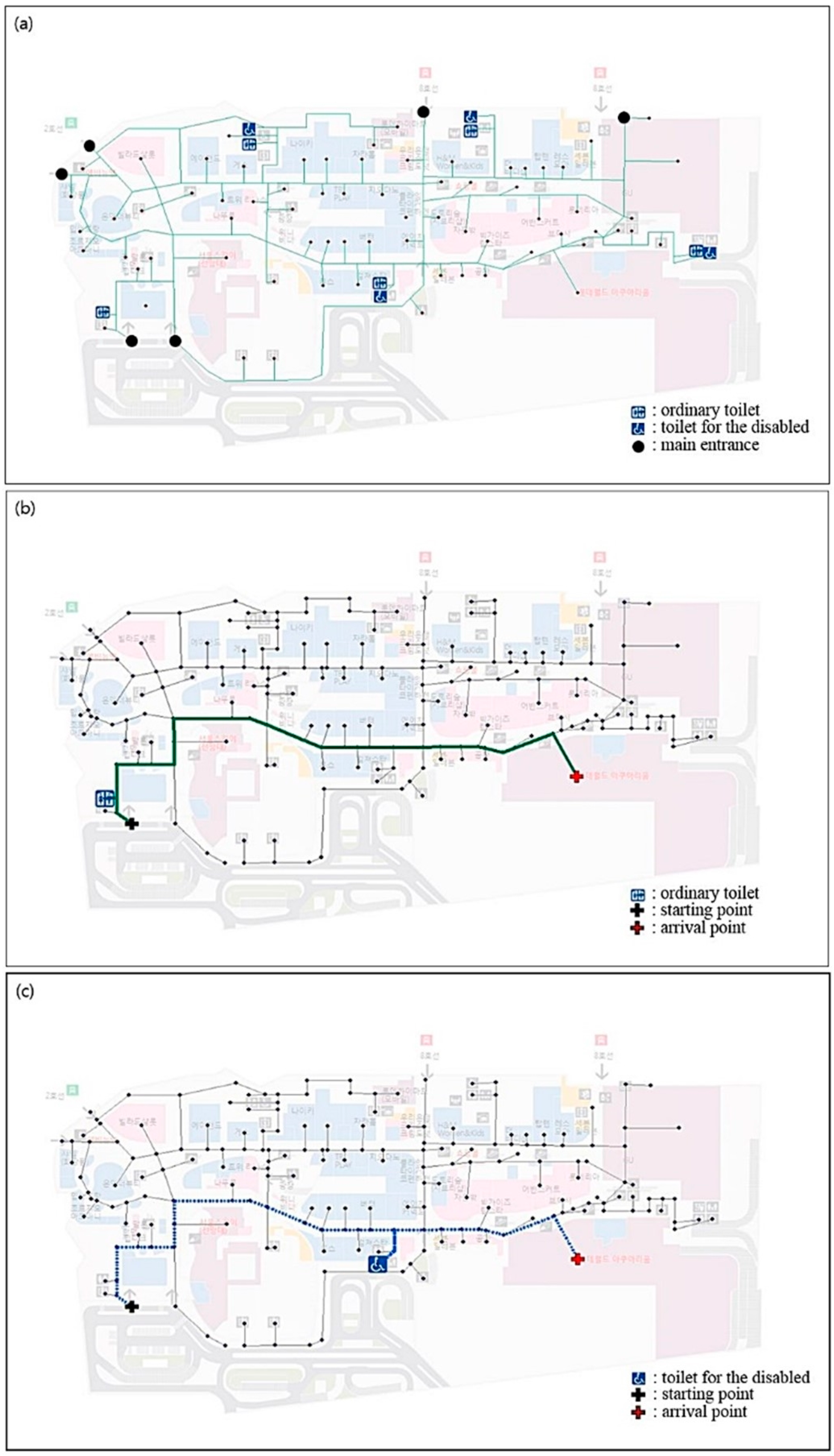
Figure 8 shows the path planning result for the target route from the west entrance (starting point) to the aquarium (destination), on the east side of the same floor, via the toilet, using information on both ordinary toilets and PWD-accessible toilets.
Figure 8a shows the main entrances, ordinary toilets, and PWD-accessible toilets, and in
Figure 8b,c, the starting point is marked with a black cross and the arrival point is marked with a red cross. For the same starting and destination points, the solid line represents the optimal route for the general user (
Figure 8b), and the dotted line represents the optimal route for the user of people with mobility disabilities (
Figure 8c). The figure shows that different toilets were selected for the two groups because the toilet selected for the general route was not PWD-accessible. Thus, the proposed model fully reflected the relevant feature information when planning the route.
Table 4 shows the straight-line distance and estimated travel length between the origin and destination for each of the two routes. The distance was calculated from the sum of the straight-line distance from the starting point to the stopover and the straight-line distance from the stopover to the destination. The straight-line distance of the PWD path is shorter than that of the ordinary pedestrians, but the actual travel length is longer because, although the overall route is similar, the routes required to access the respective toilets are slightly different.
4.2. Case 2: Multi-Floor Navigation
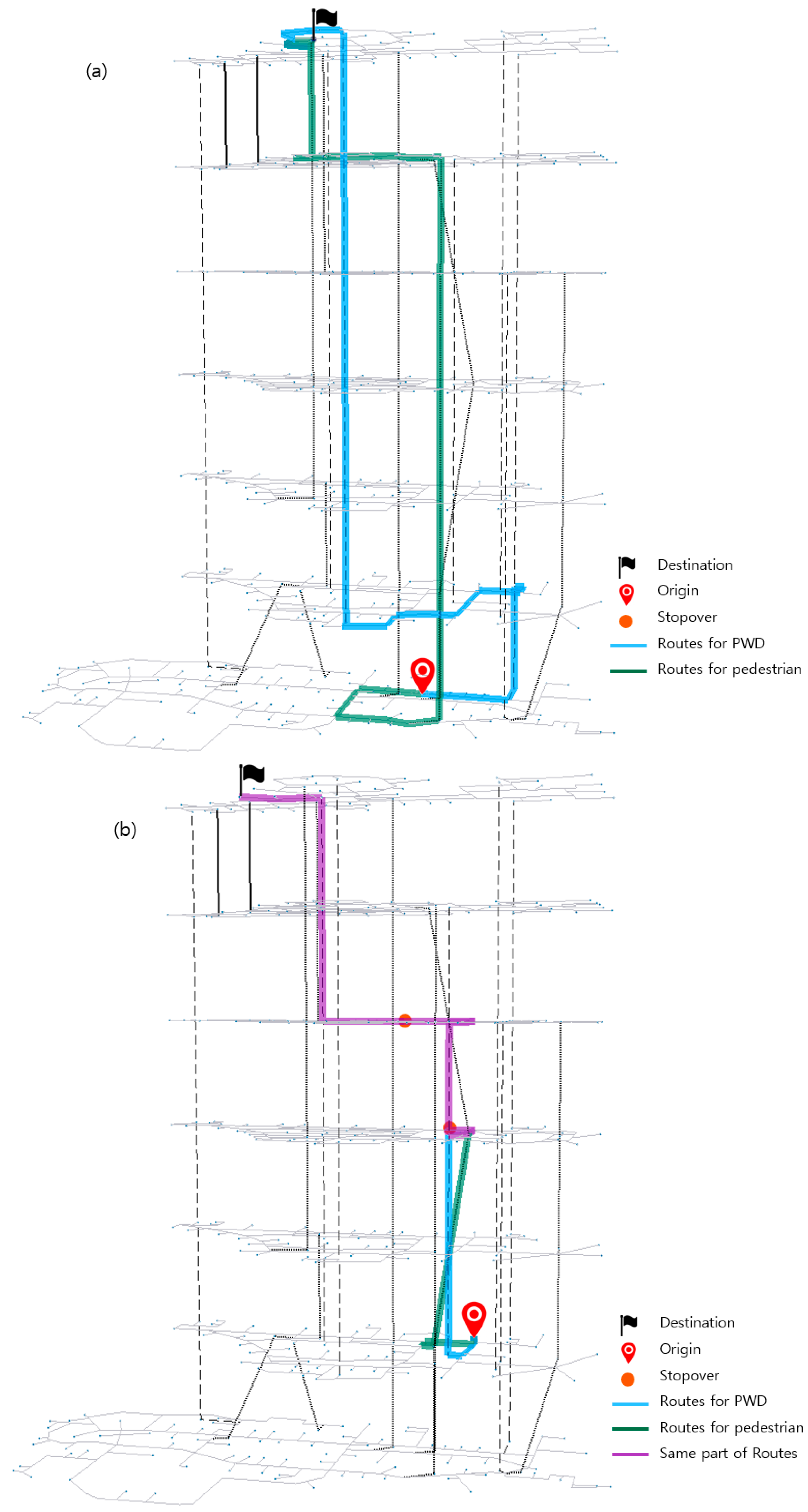
As another case for model verification, we targeted travel that included inter-floor movements, and
Figure 9 shows results generated for the optimal routes for both pedestrians (the green line) and people with mobility disabilities (the yellow line). To ensure movement without any assistance, the route extracted for people with mobility disabilities must not include barriers, and in inter-floor movement, the optimal paths for people with mobility disabilities and pedestrians are quite different. Unlike pedestrians, who are free to move between floors through stairs and escalators, wheelchair users can only move between floors via elevators with ample space or stairs and escalators with auxiliary facilities such as wheelchair lift. This different behavior can be clearly observed in the routing results in
Figure 9. In
Figure 9a, the intersection near the H&M store located on the first basement level was used as the starting point and the intersection near NS Kitchen on the sixth floor was selected as the destination. Referring to the results, because the closest elevator to the destination runs only from the first to the sixth floor, the optimal route for people with mobility disabilities is to transfer to that elevator after moving from the basement to the first floor via another elevator. In contrast, the optimal route for ordinary pedestrians was computed as being via transit between escalators from the first basement to the fifth and the fifth to sixth floors. As another example of multi-floor navigation, we randomly selected the starting point on the first floor, the destination on the sixth floor, and stopovers on the third and fourth floor, and the route was extracted as shown in
Figure 9b. As both ordinary pedestrians and people with mobility disabilities moved vertically using elevators, the routes from the third floor to the destination were identical. However, only in the route for ordinary pedestrians were transitions that utilize the express escalator on the third floor also included; this is to decrease the vertical travel time and because people with mobility disabilities cannot use an escalator without any aids. This indicates that a
PWDEscalator acts as an inaccessible transition space if it does not satisfy the criteria for being accessible.
Table 5 shows the straight-line distance and estimated travel length between starting point and destination for the two examples in Case 2. The travel distances were different because the PWD route bypassed spaces and facilities that were inaccessible. The PWD route was relatively long compared to the route for ordinary pedestrians because the latter can move vertically by using escalator, whereas people with mobility disabilities have to transfer between floors using the elevators. In
Table 5b, since identical routes were computed for transferring from the third floor to the destination, these routes had a relatively small difference in the estimated travel length. As in Case 1, this case also confirmed that the route derived by the proposed model properly reflects the PWD accessibility information and can thus provide meaningful information for PWD path planning for both horizontal and vertical movement.
5. Conclusions
With the increasing complexity of indoor spaces, the associated challenge to PWD mobility has become an important social issue, and services such as personalized indoor navigation require indoor models that include sufficient obstacle information, preferably with a standardized data model that can be used for a variety of services.
Thus, this study was conducted to generate a data model that supports the movement of people with mobility disabilities in indoor environments. To this end, we developed an extended data model that focuses on PWD mobility. By examining design standards for PWD-accessible buildings, the factors that affect the movement of people with mobility disabilities were extracted from various architectural elements and indoor facilities, and restructured into features and attributes for the IndoorGML extension. The extension was then connected to the IndoorGML core and navigation modules. As the proposed data model is based on IndoorGML, a standard for indoor spaces, it is expected to be appropriate for being standardized.
We then used the proposed model to generate multi-floor indoor spatial data for a large shopping mall in Korea. The Dijkstra algorithm was applied for path finding for both general pedestrians and people with mobility disabilities in two scenarios: travel within a single floor and multi-floor travel. The path finding results confirmed that the geodatabase constructed using the developed data model not only adequately described the indoor environment for people with mobility disabilities, but also contained sufficient information on many traffic barriers.
Since the model focuses on people with mobility disabilities, it is necessary to extend the model to include features related to other types of disabilities, such as visual and cognitive impairments, if the model is to be used in a wider context. Moreover, we extracted significant features and factors of mobility impairments by examining the relevant standards and regulations, assuming that these accurately reflect the opinions of actual users. However, feedback from people with mobility disabilities needs to be considered as their active involvement will help to improve the proposed data model.
The proposed data model enables the creation of an indoor model suitable for PWD path planning. Furthermore, the generated dataset can be easily shared among various services with similar purposes. To increase the usefulness of the data model established as a result of this study, we will develop a methodology for automatically constructing a PWD indoor model using various source data. In addition, in future research, it will be possible to develop a navigating algorithm that is applicable to the constructed data using the suggested model to reflect the personalized needs of people with mobility disabilities.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}