This study will be limited to non-redundant, constant-speed, single-gimbaled control moment gyroscopes (CMGs). Well-established methods are described first to elaborate typical skewed arrays of gyros (ubiquitous “benchmark” geometry [
42]), inverse steering laws, and the gyro system matrix (referred to as [
A] in the literature). The matrix contains time-varying gimbal angles that may be commanded to produce a desired torque, and the matrix also contains skew angles representing the gyro installation angle relative to the spacecraft reference frame. Changing these skew angles can bring about unique attributes for the spacecraft, such as an increased pitch, roll, or yaw capability. Mapping out these singularities for iterated gyro mounting geometries can show an engineer how to maximize these capabilities and enhance a spacecraft’s mission completion ability.
2.2. State-of-the-Art Non-Redundant Symmetric Skewed Arrays
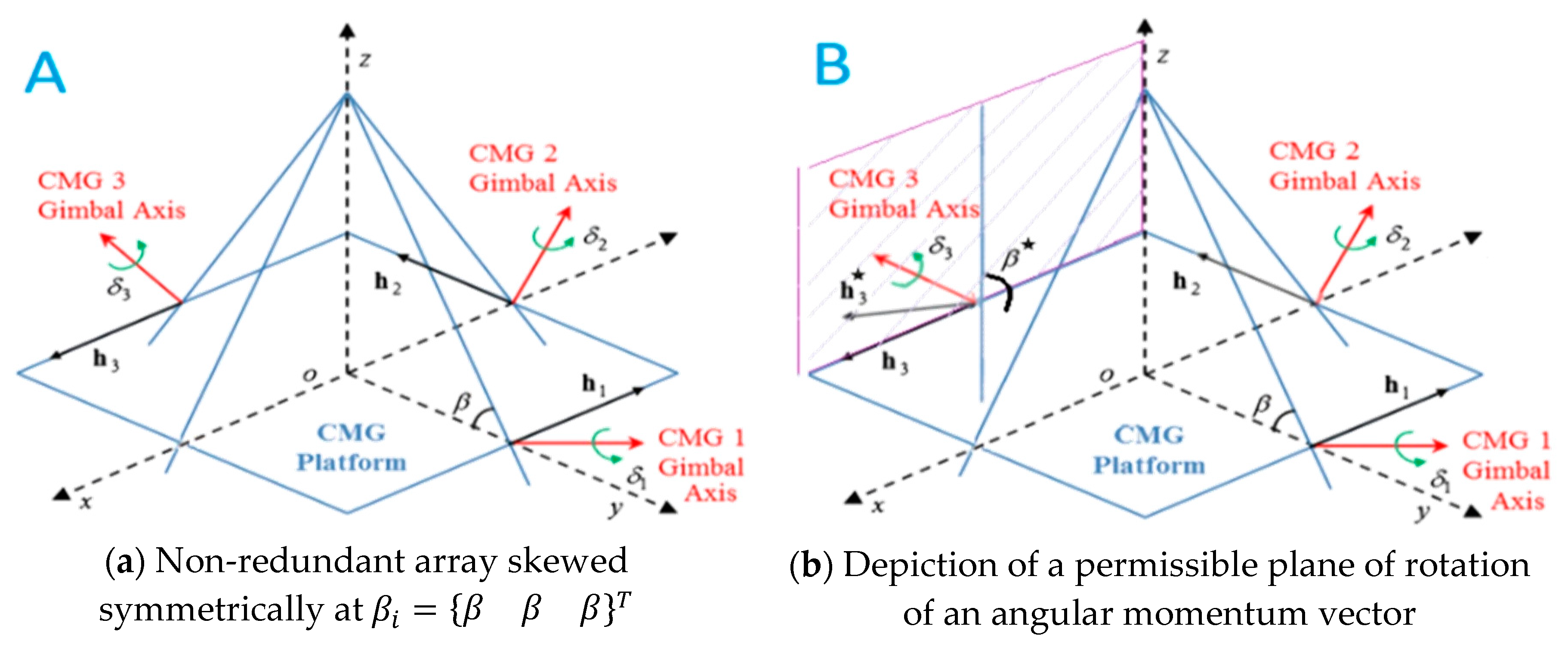
Typical non-redundant symmetric installation is depicted in
Figure 2a, while recently developed asymmetric installation is depicted in
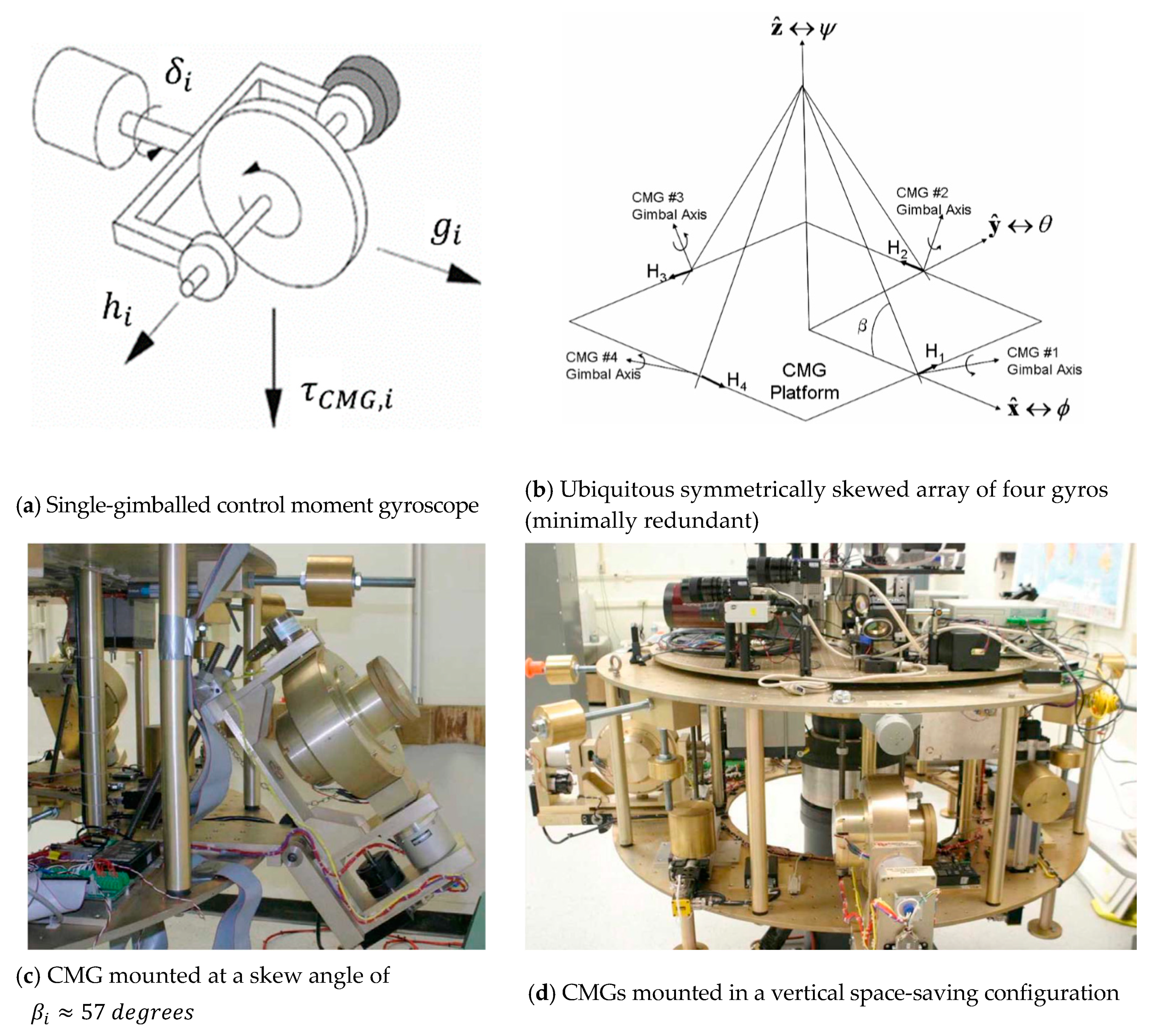
Figure 2b. Skew angles are not normally modified after installation. The gyros are gimballed, and their gimbal rotations about their respective gimbal axes are expressed as
. Gimballing rotates the angular momentum vectors
in planes perpendicular to the gimbal axis, and these planes contain the respective torque vectors in a right-hand arrangement: angular momentum, torque, and the gimbal axis. The torque axis (τ) rotation for a CMG is the axis around which the spacecraft maneuver is accomplished. The torque axis and the orthogonal relationship between the CMG’s gimbal axis (δ) and angular momentum axis (
) can be seen in
Figure 1. These relationships demonstrate how one may discover the torque axis and provide the intuition behind singularity generation in this configuration [
48].
Figure 2 depicts a rigid spacecraft with only three gyros (non-redundancy for three degrees of freedom embodied in three-dimensional motion) [
44]. Frames and axes are consistently labeled with regards to the minimally redundant case in
Figure 1, despite lacking a fourth gyro (the non-redundant case). Notice the literature’s [
43,
44] use of a capitalized
to denote an individual gyro’s angular momentum (seen in
Figure 1), while we prefer the use of a lower-case term assembled in the capitalized vector (seen in
Figure 2)
. Notice that vectors annotated in bold font in the figures are also written in equations using { } brackets, underlined terms, or even over-arrows.
According to Euler’s equation
, a time-derivative (rate of change) of the angular momentum is torque, here referred to as the (negative) torque of the CMGs, where
is referred to in typical literature on controls as the variable
. Equation (1) is the steering law (in the forward direction) that is merely the time-derivative of the projection of the individual angular momentum vector
. The relationship is expanded using the product rule for derivatives to express the change in angular momentum as the product of the gimbal rates and a spatial gradient Jacobian matrix containing gimbal angles and skew angles referred to in the literature as
. (ASIDE: notice the change in nomenclature from
Figure 1, the benchmark configuration, where a lower-case
hi is assembled into an upper-case vector
H). The relationship must be inverted, since the control
is known, and the current known gimbal positions define the
matrix, while the necessary gimbal commands
are unknown. Equation (2) reveals the inverse relationship for the gimbal steering commands, where control
is generated by typical equations of automatic control (e.g., a feedforward controller like nonlinear optimal control, and feedback controllers like PI-Proportional, Integral, PD-Proportional, Derivative, and PID-Proportional, Integral, Derivative controllers, etc.). The matrix inverse in Equation (2) is usually a matrix pseudoinverse in the literature, since the benchmark research configuration has four gyros providing four degrees of freedom for only three dimensions of motion (i.e., an overdetermined problem for which the pseudo-inverse is appropriate). The regular matrix inverse is correctly used here for this precisely determined problem where three degrees of freedom are used to provide three-dimensional motion. The [
A] matrix is the spatial gradient matrix of angular momentum normalized by one gyro’s value of angular momentum, as per Equations (3) and (4).
It should be noted that the skew angles
are also in the [
A] matrix in Equation (4) due to its use of projecting the angular momentum vectors of the gyros onto the spacecraft reference frame, as done in Equation (3). Therefore,
contributes to mathematical singularity, since the [
A] must be inverted in Equation (2). The inverse itself is of interest in this study, and several methods of computing the inverse were investigated in this research for a non-redundant (three gyro) array, and the results are summarized in
Table 1. While an analytic inverse is rarely used for overdetermined systems in favor of the pseudoinverse, since the steering matrix has a [3 × 3] dimension in this non-redundant case, analytical expressions are available in both matrix form and as decoupled, multiple equations. These are respectively named “analytic inverse” and “analytic formulas” in
Table 1.
A common controversial issue is that the chosen computational implementations produce disparate results, despite using the same equation. One such computational implementation is the methodology chosen to calculate the matrix inverse (the source of mathematical singularities) in the steering law in Equation (2). In order to aid reproducibility of the results in this manuscript, seven common inversion methods are compared in
Table 1, while the Moore–Penrose pseudoinverse was chosen here and implemented by the MATLAB
pinv command. The Moore–Penrose pseudoinverse implemented in MATLAB was the baseline for comparison, since it had the lowest matrix norm error.
2.6. Methodology
There does not exist a reference volume that includes many, a dozen, or continuous infinite selections of installation geometries (options for skew angles,
), and
Section 3 accomplishes this key novel contribution to the field. Towards the goal of creating such a reference volume,
Section 3 of this manuscript reveals the results of our research starting from the current state-of-the-art summarized in
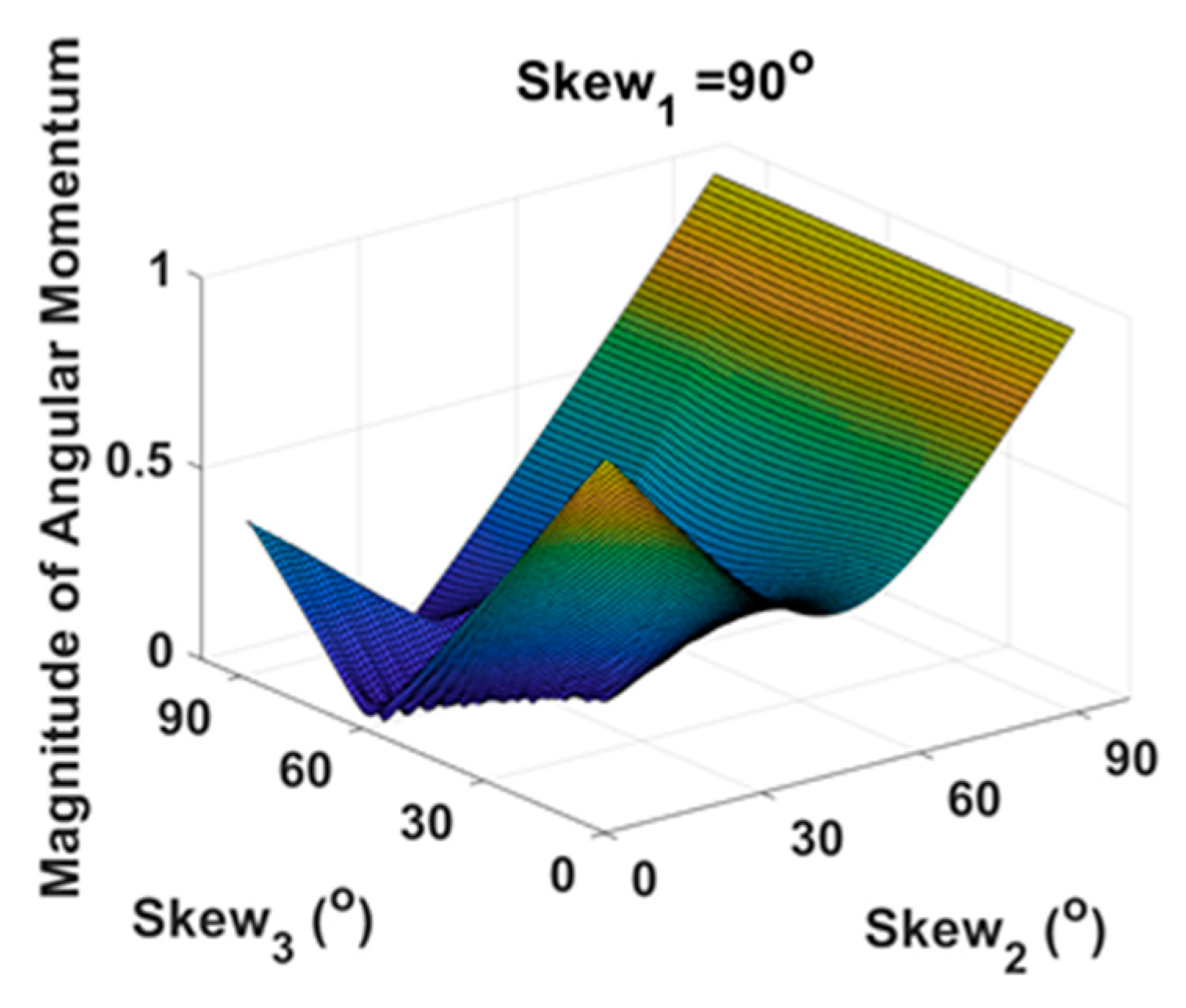
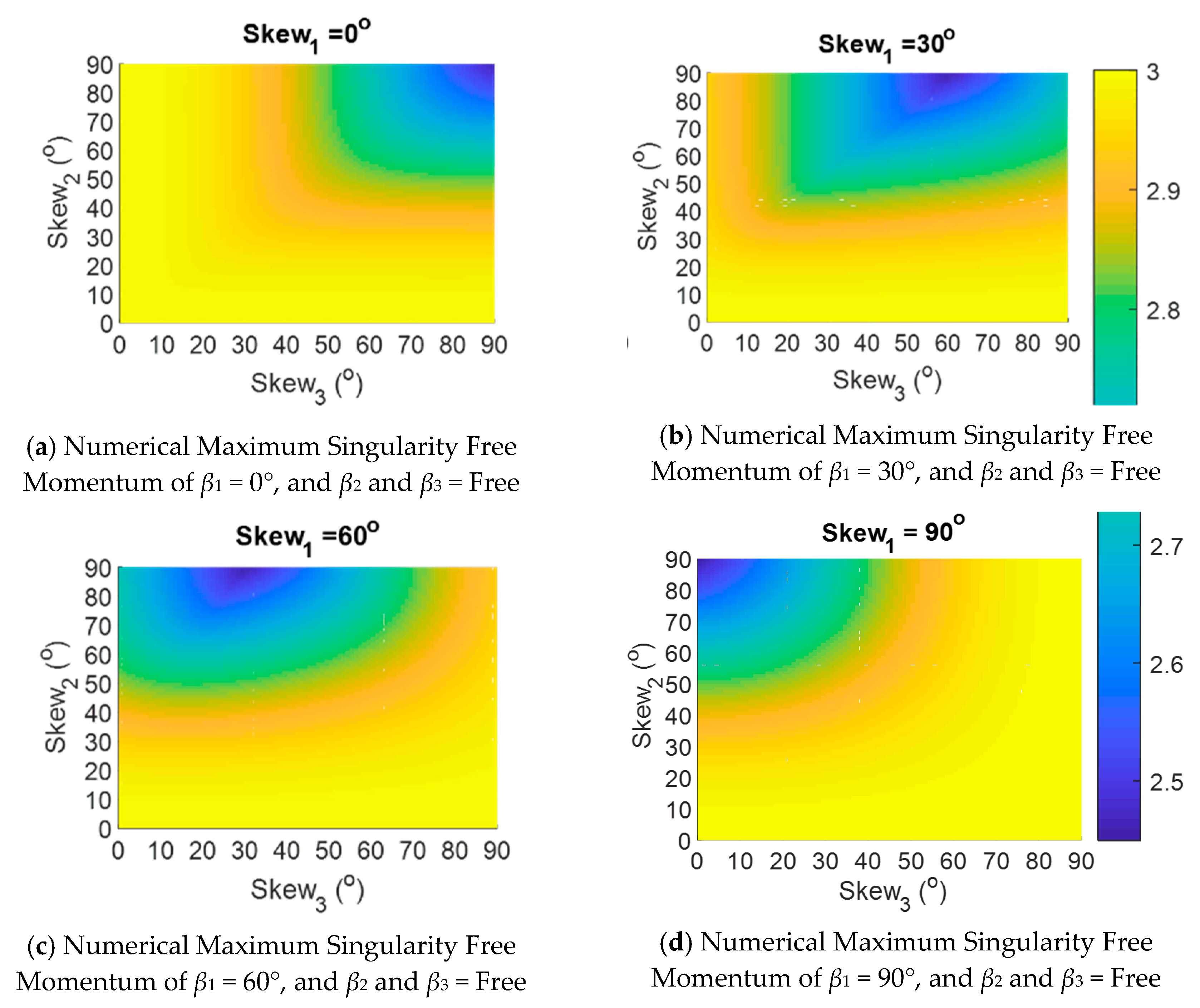
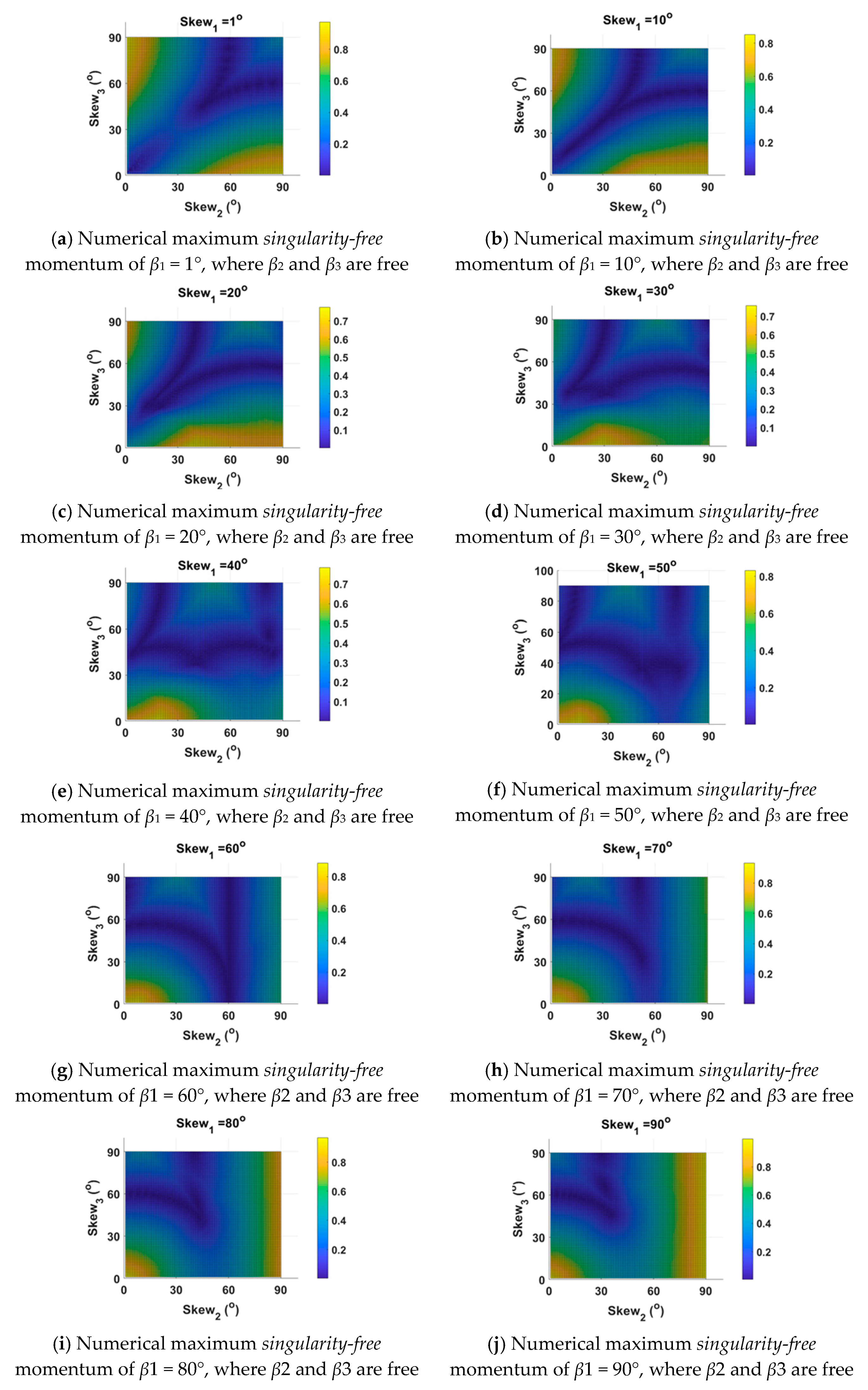
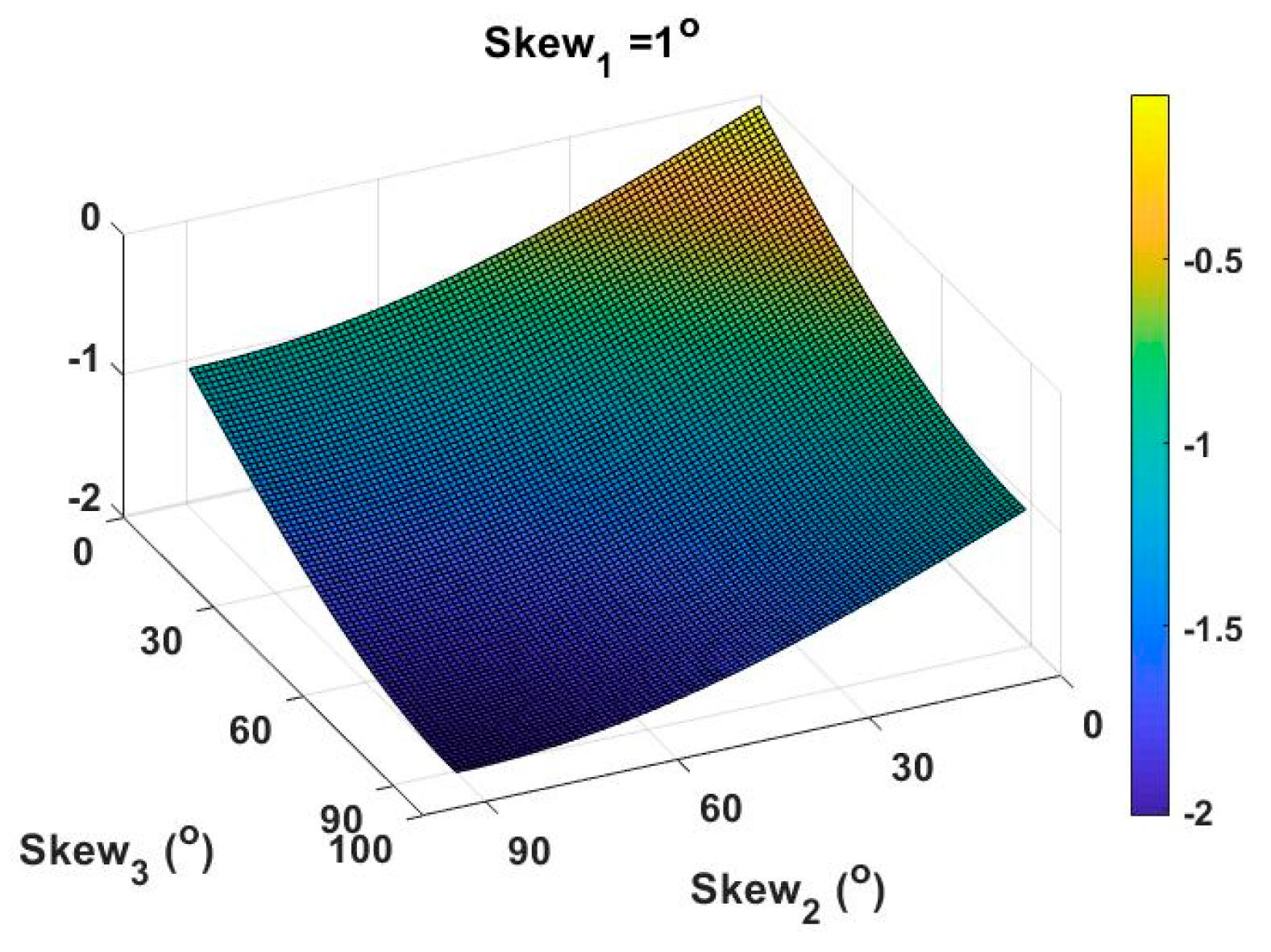
Table 2 that has already been presented in the literature. We commence with holding gyro #1 at a 90-degree skew angle and allowing gyros #2 and #3 to vary continuously from 0 to 90 degrees. Similarly, we examine holding gyro #1 at zero degrees and permitting the other two gyros to be installed at any arbitrary angle. Next, we step through logical iterations: what happens when two gyros are fixed and a third is free. Considering recent companion research [
48] by the authors illustrating peculiarities of near-planar momentum generation associated with very low skew angles, and following the logical iteration methodology, we next consider holding two gyros at very low skew angles. The aforementioned iterations reveal the maximum singularity-free momentum space available (an inner momentum space), so lastly, we investigate the maximum (saturation) capability, regardless of inner singularities akin to the original benchmark optimization [
42].










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}