
Bio-Inspired Self-Organized Fission–Fusion Control Algorithm for UAV Swarm


Abstract
:1. Introduction
- Inspired by the topological interaction structure of starling, we design a self-organized fission–fusion control framework for the UAV swarm and establish the kinematic model of the UAVs as well as the UAV swarm controller.
- Based on the topological interaction structure of starlings, we introduce a sub-swarm selection algorithm to control the number of agents in the sub-swarm.
- We present a sub-swarm trapping algorithm for different interference situations of dynamic obstacles with a tracking function.
- We illustrate the feasibility and effectiveness of our proposed control method by numerical simulations, which include the conditions of differentiation index, polarization index, the precision of response stimuli, and communication load.
2. Problem Formulation
2.1. Traditional Model for UAV Cluster Dynamics
2.2. UAV Kinematic Model
2.3. Model Relationship between UAV Cluster Controller and UAV Kinematic Model
3. Bio-Inspired Self-Organized Fission–Fusion Control Framework
3.1. Starling Topological Interaction Algorithm
3.2. UAV SWARM Self-Organized Fission–Fusion Control Framework
4. Sub-Swarm Selection Algorithm and Sub-Swarm Induction Algorithm
4.1. Sub-Swarm Selection Algorithm
| Algorithm 1 Sub-Swarm Selection Algorithm |
| input: , output: sub-swarm function sub-swarm selection now-number 0 if < then for i 1: flight-number do if now-number except-number then alter-sub-swarmi choose the agent from if then sub-swarm [1,now-number] alter-sub-swarmi now-number now-number + 1 end if if now-number == except-number then break end if for j do alter-sub-swarmj choose the agent from if then sub-swarm [1,now-number] alter-sub-swarmj now-number now-number + 1 end if if now-number == except-number then break end if end for end if end for end if return sub-swarm end function |
4.2. Sub-Swarm Trapping Algorithm
| Algorithm 2 Sub-Swarm Trapping Algorithm |
| input: , , output: utrapping, ulure function sub-swarm trapping if sub-swarm Algorithm 1 if end if if end if for if end if When end for if end if end if return end function |
5. Simulation Studies
5.1. Swarm Campaign Evaluation Metrics
5.1.1. Order Parameters
- Polarization Index
- 2.
- Differentiation Index
5.1.2. Performance Evaluation Index
- The Precision of Response Stimuli
- 2.
- Communication Load
5.2. Swarm Simulation Parameter Setting
5.3. Simulation Results
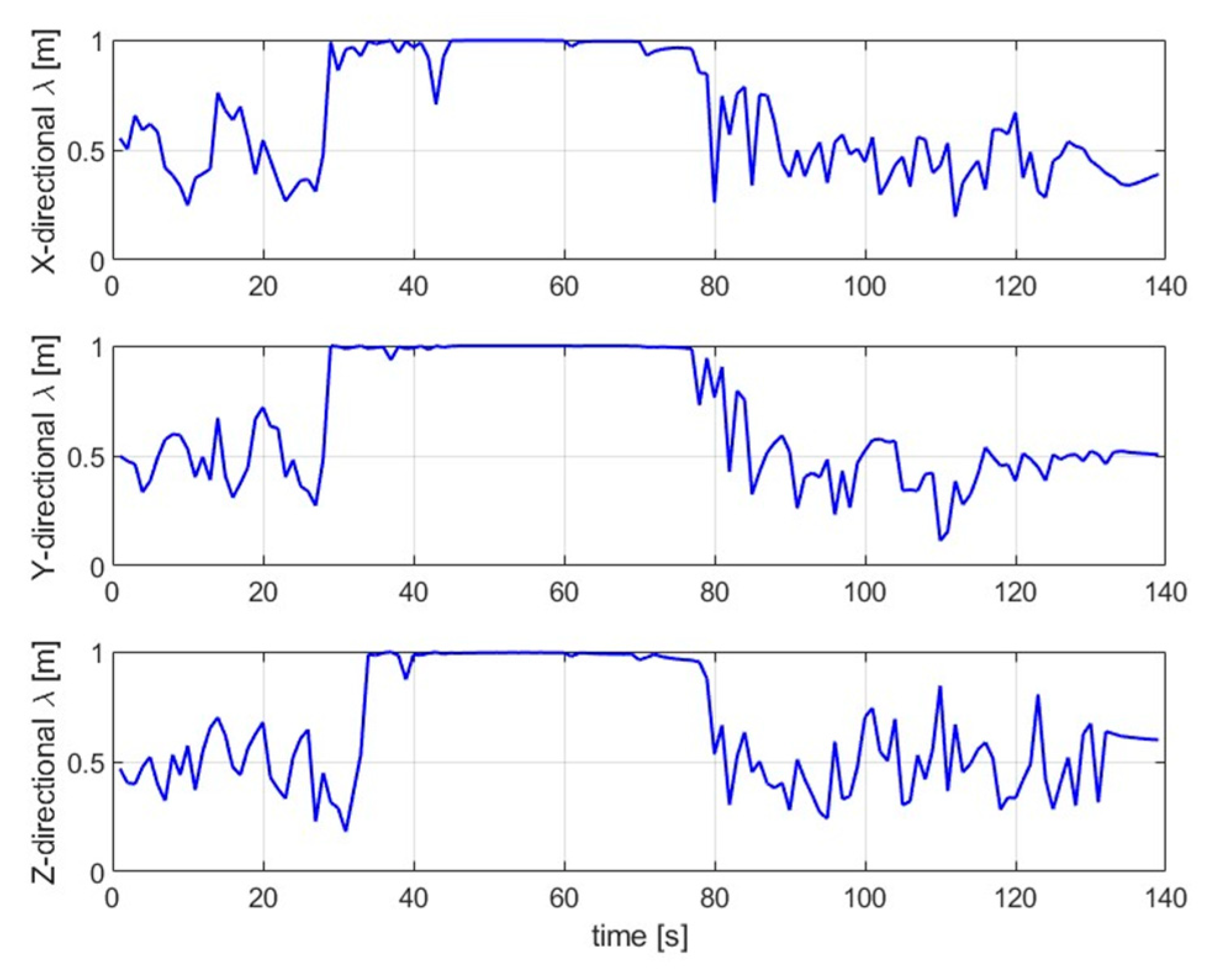
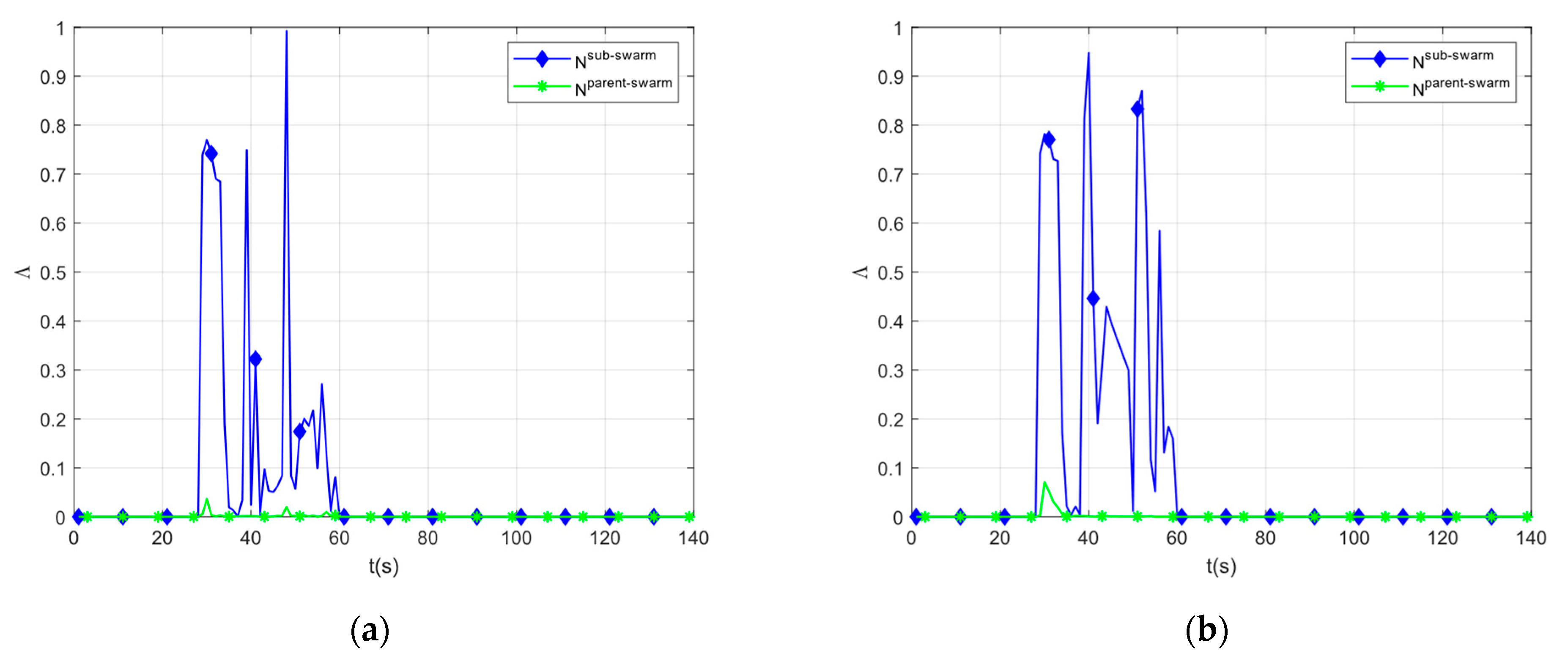
5.3.1. Fission–Fusion in the Absence of Back-Catch
5.3.2. Fission–Fusion Processes in the Case of Back-Catch
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Dynamic Obstacle Movement Model
References
- Camazine, S.; Deneubourg, J.L.; Franks, N.R.; Sneyd, J.; Theraula, G.; Bonabeau, E. Self-Organization in Biological Systems; Princeton University Press: Princeton, NJ, USA, 2020. [Google Scholar]
- Dutta, K. How birds fly together: The dynamics of flocking. Resonance 2010, 15, 1097–1110. [Google Scholar] [CrossRef]
- Sail, P.; Borkar, M.R.; Shaikh, I.; Pal, A. Faunal diversity of an insular crepuscular cave of Goa, India. J. Threat. Taxa 2021, 13, 17630–17638. [Google Scholar] [CrossRef]
- Croft, D.P.; James, R.; Thomas, P.O.R.; Hathaway, C.; Mawdsley, D.; Laland, K.N.; Krause, J. Social structure and co-operative interactions in a wild population of guppies (Poecilia reticulata). Behav. Ecol. Sociobiol. 2006, 59, 644–650. [Google Scholar] [CrossRef]
- Couzin, I.D.; Laidre, M.E. Fission–fusion populations. Curr. Biol. 2009, 19, R633–R635. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kummer, H.; Loy, J. Social Behavior and Habitat. (Book Reviews: Primate Societies. Group Techniques of Ecological Adap-tation). Science 1971, 174, 49–51. [Google Scholar] [CrossRef]
- Schusterman, R.J.; Thomas, J.A.; Wood, F.G.; Schusterman, R. Dolphin Cognition and Behavior: A Comparative Approach; Psychology Press: London, UK, 2013. [Google Scholar]
- Mann, J.; Connor, R.C.; Tyack, P.L.; Whitehead, H. Cetacean Societies: Field Studies of Dolphins and Whales; University of Chicago Press: Chicago, IL, USA, 2000. [Google Scholar]
- Pryor, K.; Norris, K.S. Dolphin Societies: Discoveries and Puzzles; University of California Press: Berkeley, CA, USA, 1991. [Google Scholar]
- Symington, M.M. fission-fusion social organization in Ateles and Pan. Int. J. Primatol. 1990, 11, 47–61. [Google Scholar] [CrossRef]
- Bajec, I.L.; Heppner, F.H. Organized flight in birds. Anim. Behav. 2009, 78, 777–789. [Google Scholar] [CrossRef]
- Haque, M.; Rahmani, A.; Egerstedt, M. A hybrid, multi-agent model of foraging bottlenose dolphins. IFAC Proc. Vol. 2009, 42, 262–267. [Google Scholar] [CrossRef] [Green Version]
- Bansal, J.C.; Sharma, H.; Jadon, S.S.; Clerc, M. Spider monkey optimization algorithm for numerical optimization. Memetic Comput. 2014, 6, 31–47. [Google Scholar] [CrossRef]
- Zelenka, J.; Kasanický, T.; Budinská, I.; Naďo, L.; Kaňuch, P. SkyBat: A Swarm Robotic Model Inspired by Fission-Fusion Be-haviour of Bats. In Proceedings of the International Conference on Robotics in Alpe-Adria Danube Region, Poitiers, France, 29 September 2018; pp. 521–528. [Google Scholar] [CrossRef]
- Spears, W.M.; Spears, D.F.; Hamann, J.C.; Heil, R. Distributed, physics-based control of swarms of vehicles. Auton. Robot. 2004, 17, 137–162. [Google Scholar] [CrossRef]
- Berlinger, F.; Gauci, M.; Nagpal, R. Implicit coordination for 3D underwater collective behaviors in a fish-inspired robot swarm. Sci. Robot. 2021, 6, eabd8668. [Google Scholar] [CrossRef] [PubMed]
- Liang, H.; Fu, Y.; Gao, J. Bio-inspired self-organized cooperative control consensus for crowded UUV swarm based on adaptive dynamic interaction topology. Appl. Intell. 2021, 51, 4664–4681. [Google Scholar] [CrossRef]
- Wang, C.; Wu, A.; Hou, Y.; Liang, X.; Xu, L.; Wang, X. Optimal deployment of swarm positions in cooperative interception of multiple UAV swarms. Digit. Commun. Netw. 2022, 8. [Google Scholar] [CrossRef]
- Aureli, F.; Schaffner, C.M.; Boesch, C.; Bearder, S.K.; Call, J.; Chapman, C.A.; Connor, R.; Fiore, A.D.; Dunbar, R.I. Fission-fusion dynamics: New research algorithms. Curr. Anthropol. 2008, 49, 627–654. [Google Scholar] [CrossRef]
- Magesh, M.; Jawahar, P.K.; Saranya, S.N. Spider Monkey Based Metaheuristic Tuning of PID Controllers for Stability Landing of UAV’S with SMP-Auxetic Landing Gears. In Proceedings of the 2022 First International Conference on Electrical, Information and Communication Technologies (ICEEICT), Trichy, India, 16–18 February 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Reynolds, C.W. Flocks, Herds and Schools: A Distributed Behavioral Model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 27–31 July 1987; pp. 25–34. [Google Scholar] [CrossRef] [Green Version]
- Olfati-Saber, R. Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Trans. Autom. Control 2006, 51, 401–420. [Google Scholar] [CrossRef] [Green Version]
- Lee, G.; Chong, N.Y. A geometric approach to deploying robot swarms. Ann. Math. Artif. Intell. 2008, 52, 257–280. [Google Scholar] [CrossRef]
- Lei, X.K.; Liu, M.Y.; Yang, P.P. Fission control algorithm for swarm based on local following interaction. Control Decis. 2013, 28, 741–745. Available online: http://en.cnki.com.cn/Article_en/CJFDTOTAL-KZYC201305020.htm (accessed on 30 August 2022).
- Yang, P.; Yan, M.; Song, J.; Tang, Y. Self-Organized fission-fusion Control Algorithm for Flocking Systems Based on Inter-mittent Selective Interaction. Complexity 2019, 2019, 2187812. [Google Scholar] [CrossRef]
- You, H.E. Mission-driven autonomous perception and fusion based on UAV swarm. Chin. J.Aeronaut. 2020, 33, 2831–2834. [Google Scholar] [CrossRef]
- Ling, H.; Mclvor, G.E.; van der Vaart, K.; Vaughan, R.T.; Thornton, A.; Ouellette, N.T. Costs and benefits of social relationships in the collective motion of bird flocks. Nat. Ecol. Evol. 2019, 3, 943–948. [Google Scholar] [CrossRef]
- Ling, H.; Mclvor, G.E.; van der Vaart, K.; Vaughan, R.T.; Thornton, A.; Ouellette, N.T. Local interactions and their group-level consequences in flocking jackdaws. Proc. R. Soc. B 2019, 286, 20190865. [Google Scholar] [CrossRef]
- Ballerini, M.; Cabibbo, N.; Candelier, R.; Cavagna, A.; Cisbani, E.; Giardina, I.; Zdravkovic, V. Interaction ruling animal collective behavior depends on topological rather than metric distance: Evidence from a field study. Proc. Natl. Acad. Sci. USA 2008, 105, 1232–1237. [Google Scholar] [CrossRef] [Green Version]
- Hildenbrandt, H.; Carere, C.; Hemelrijk, C.K. Self-organized aerial displays of thousands of starlings: A model. Behav. Ecol. 2010, 21, 1349–1359. [Google Scholar] [CrossRef]
- Templeton, J.J.; Giraldeau, L.A. Patch assessment in foraging flocks of European starlings: Evidence for the use of public information. Behav. Ecol. 1995, 6, 65–72. [Google Scholar] [CrossRef]
- Ourari, R.; Cui, K.; Elshamanhory, A.; Koeppl, H. Nearest-Neighbor-Based Collision Avoidance for Quadrotors via Rein-Forcement Learning. In Proceedings of the International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 293–300. [Google Scholar] [CrossRef]
- Liu, Z.; Tian, Y.; Li, C. Coadaptive following control of swarm robot system with multiple leaders in dynamic damping environment. Jiqiren 2011, 33, 385–393. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. Constrained Nonlinear Tracking Control for Small Fixed-Wing Unmanned Air Vehicles. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; pp. 4663–4668. [Google Scholar] [CrossRef]
- Couzin, I.D.; Krause, J.; Franks, N.R.; Levin, S.A. Effective leadership and decision-making in animal groups on the move. Nature 2005, 433, 513–516. [Google Scholar] [CrossRef]
- Vicsek, T.; Zafeiris, A. Collective motion. Phys. Rep. 2012, 517, 71–140. [Google Scholar] [CrossRef] [Green Version]
- Stojakovic, P.; Rasuo, B. Single propeller airplane minimal flight speed based upon the lateral maneuver condition. Aerosp. Sci. Technol. 2016, 49, 239–249. [Google Scholar] [CrossRef]
- Stojaković, P.; Velimirović, K.; Rašuo, B. Power optimization of a single propeller airplane take-off run on the basis of lateral maneuver limitations. Aerosp. Sci. Technol. 2018, 72, 553–563. [Google Scholar] [CrossRef]
- Vicsek, T.; Czirók, A.; Ben-Jacob, E.; Cohen, I.; Shochet, O. Novel type of phase transition in a system of self-driven particles. Phys. Rev. Lett. 1995, 75, 1226. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description | Numerical Value |
|---|---|---|
| inertia coefficient | 0.8 | |
| environmental damping factor | 0.004 | |
| random noise factor | 0.003 | |
| position cooperation factor | 1 | |
| velocity alignment factor | 1 | |
| decay coefficient | 0.2 | |
| desired spacing | 0.2 | |
| self-driving instrument control parameters. | 0.75 | |
| 3 | ||
| 0.3 | ||
| 1 | ||
| minimum horizontal speed | 0.05 | |
| maximum horizontal speed | 1.5 | |
| maximum lateral overload | 10 | |
| maximum height change rate | 2.35 | |
| ɡ | gravitational acceleration | 9.8 |
| minimum height change rate | −2.35 | |
| perception radius | 70 | |
| polarization index threshold | 0.85 | |
| judgment thresholds safe trapping range | 3 3–5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Ding, W.; Wang, Y.; Luo, Y.; Zhang, Z.; Xiao, J. Bio-Inspired Self-Organized Fission–Fusion Control Algorithm for UAV Swarm. Aerospace 2022, 9, 714. https://doi.org/10.3390/aerospace9110714
Zhang X, Ding W, Wang Y, Luo Y, Zhang Z, Xiao J. Bio-Inspired Self-Organized Fission–Fusion Control Algorithm for UAV Swarm. Aerospace. 2022; 9(11):714. https://doi.org/10.3390/aerospace9110714
Chicago/Turabian StyleZhang, Xiaorong, Wenrui Ding, Yufeng Wang, Yizhe Luo, Zehao Zhang, and Jing Xiao. 2022. "Bio-Inspired Self-Organized Fission–Fusion Control Algorithm for UAV Swarm" Aerospace 9, no. 11: 714. https://doi.org/10.3390/aerospace9110714
APA StyleZhang, X., Ding, W., Wang, Y., Luo, Y., Zhang, Z., & Xiao, J. (2022). Bio-Inspired Self-Organized Fission–Fusion Control Algorithm for UAV Swarm. Aerospace, 9(11), 714. https://doi.org/10.3390/aerospace9110714