

Three-Dimensional Reconstruction of Shoe Soles via Binocular Vision Based on Improved Matching Cost


Abstract
:1. Introduction
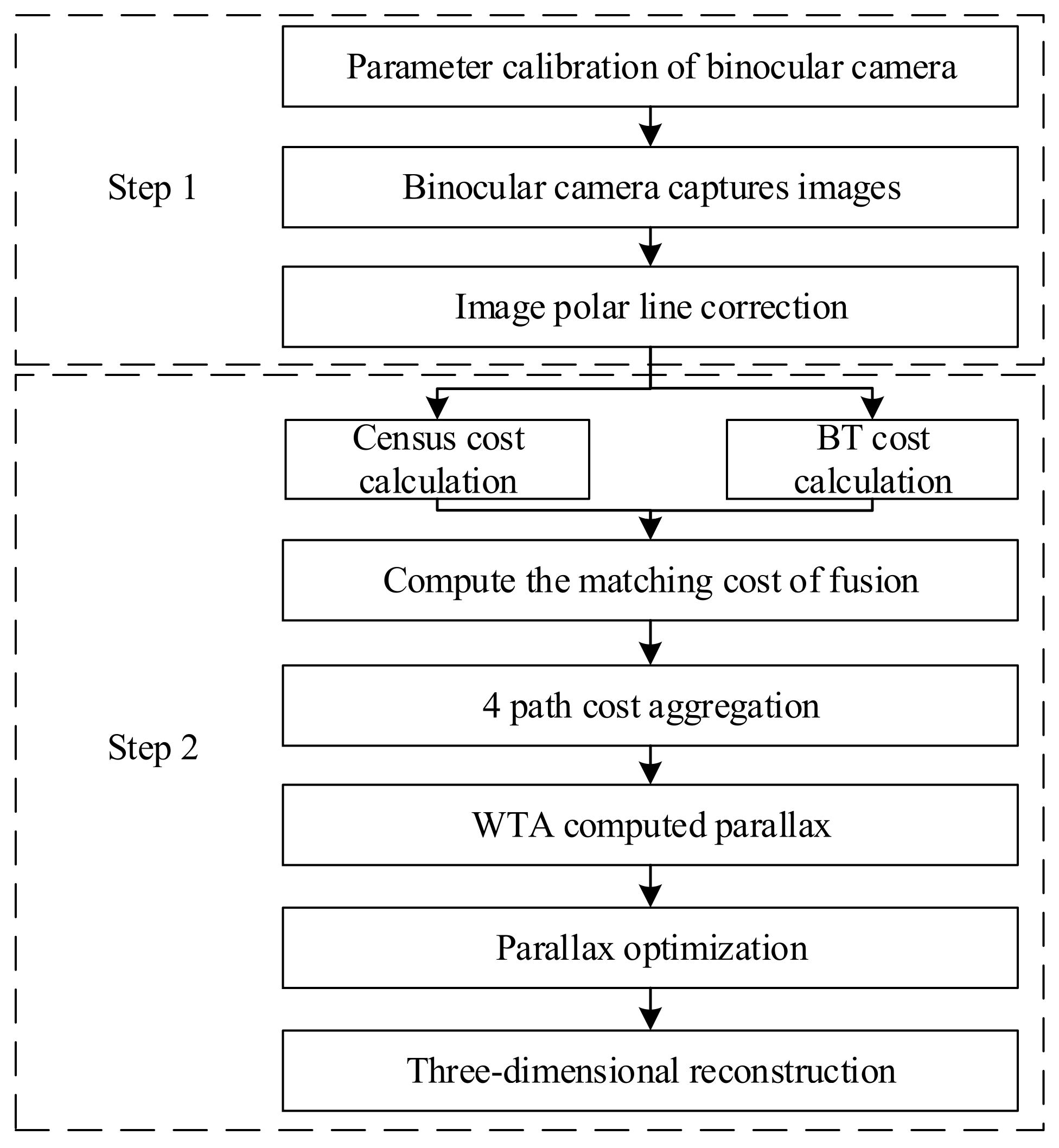
2. Improved Binocular Visual Matching Cost Method
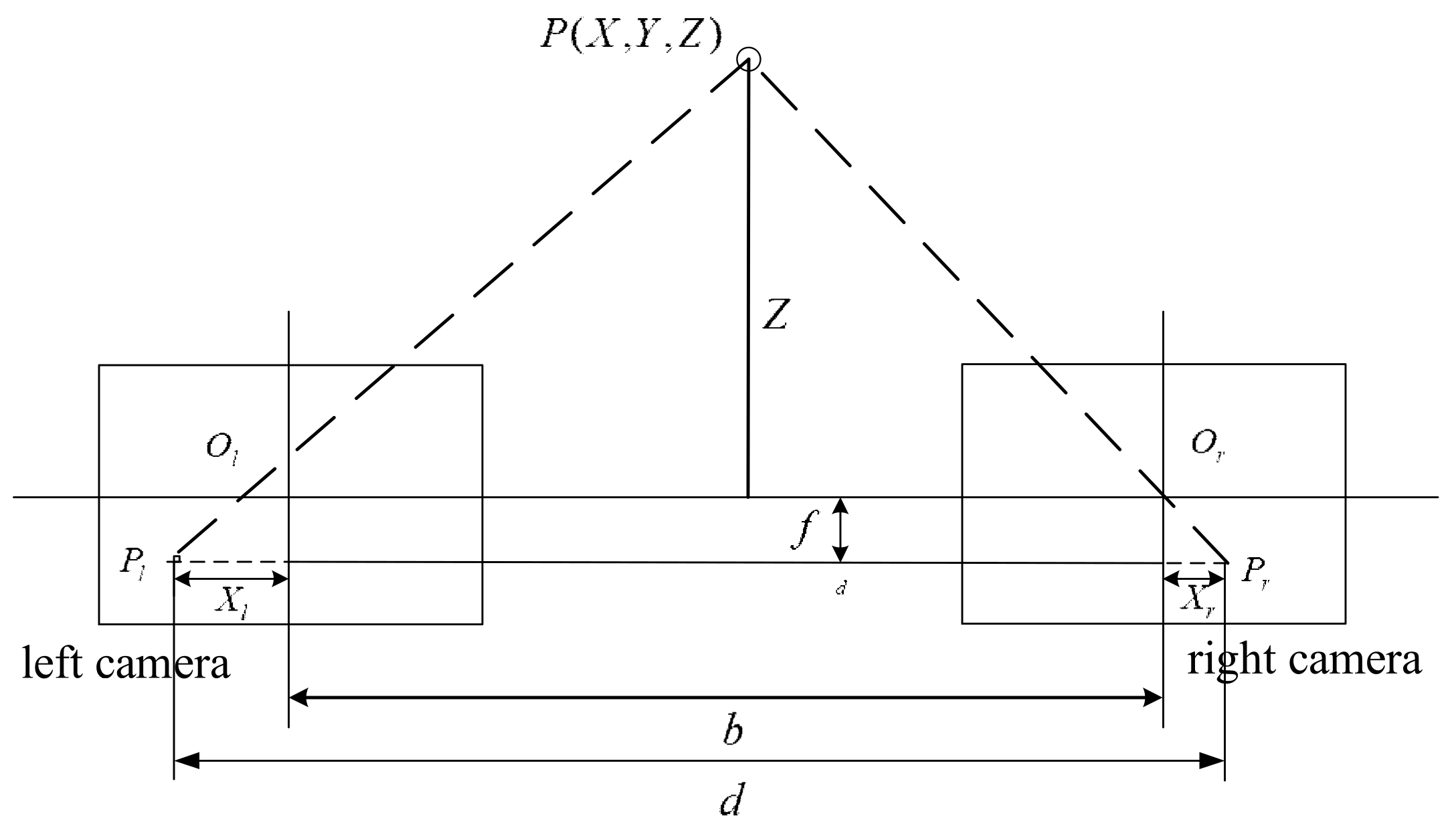
2.1. Binocular Vision Image Acquisition
2.1.1. Matching Cost Calculation
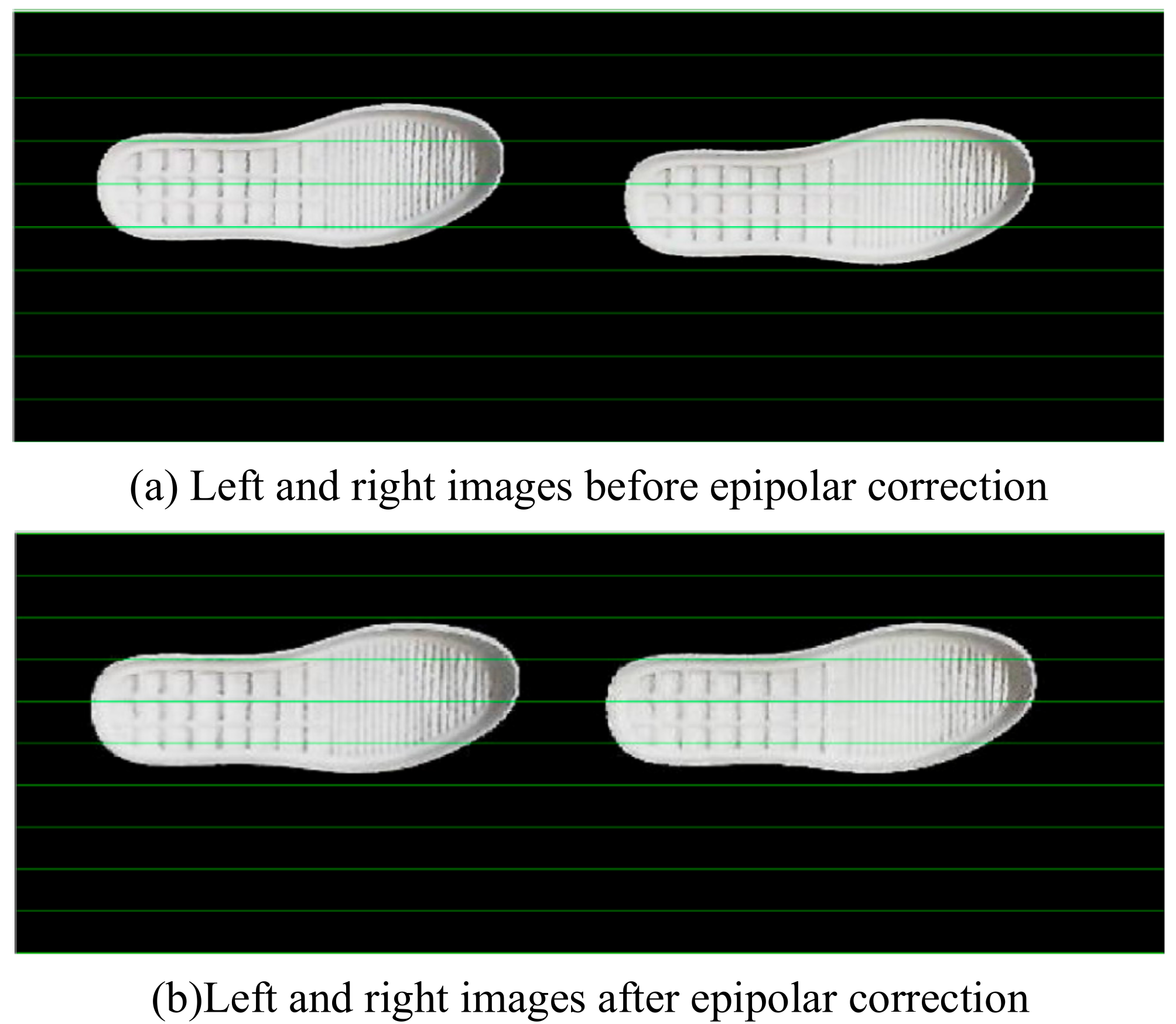
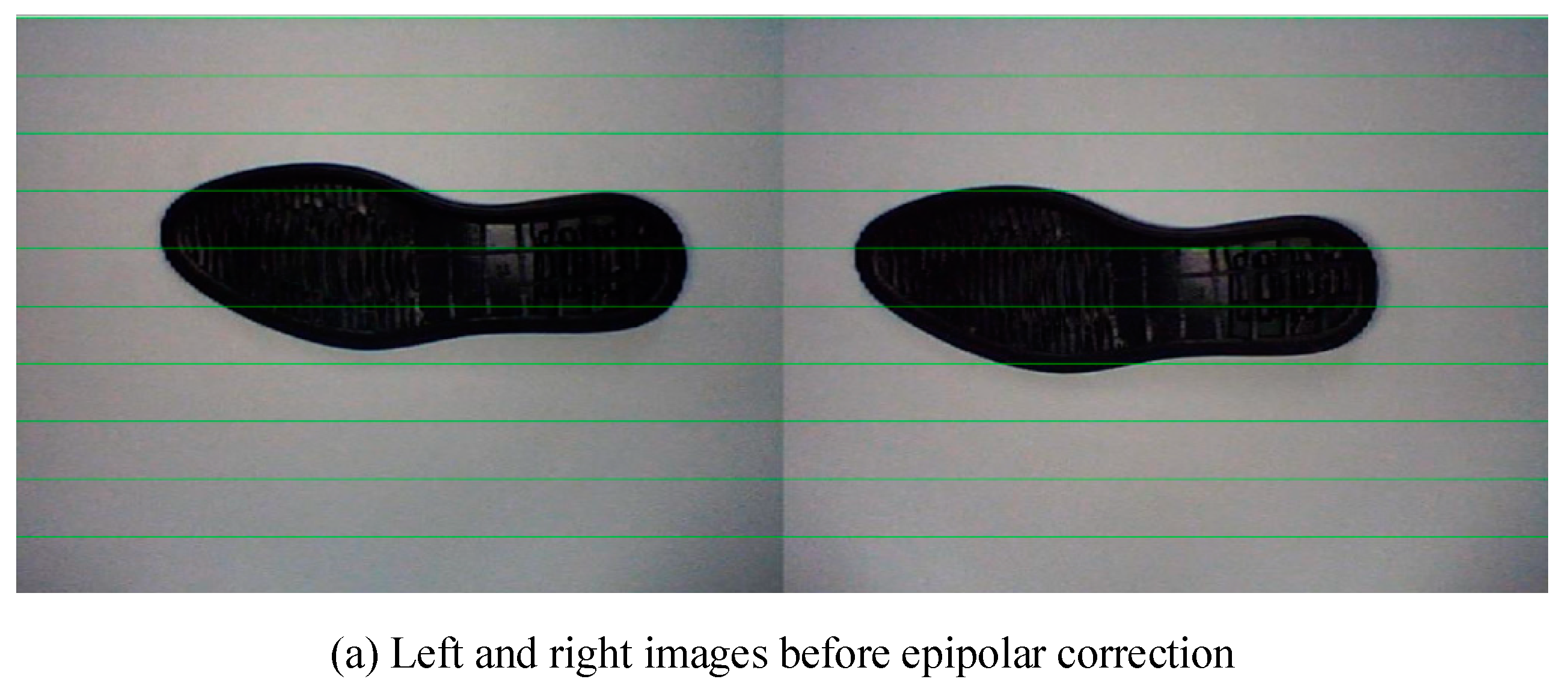
2.1.2. Binocular Vision Image Acquisition and Preprocessing
2.2. 3D reconstruction of Improved Matching Cost Algorithm
2.2.1. Match Cost Calculation
- (1)
- With the point in the left figure as the center, build a neighborhood window of size .
- (2)
- Do the same operation in the right image, and select all the pixels in the right image window at the same time.
- (3)
- Compare the gray value of the left and right neighborhood center points and the other points, respectively. Obtain two binary strings according to the size of the gray value. Find the Hamming distance between the two strings to get the cost .
- (4)
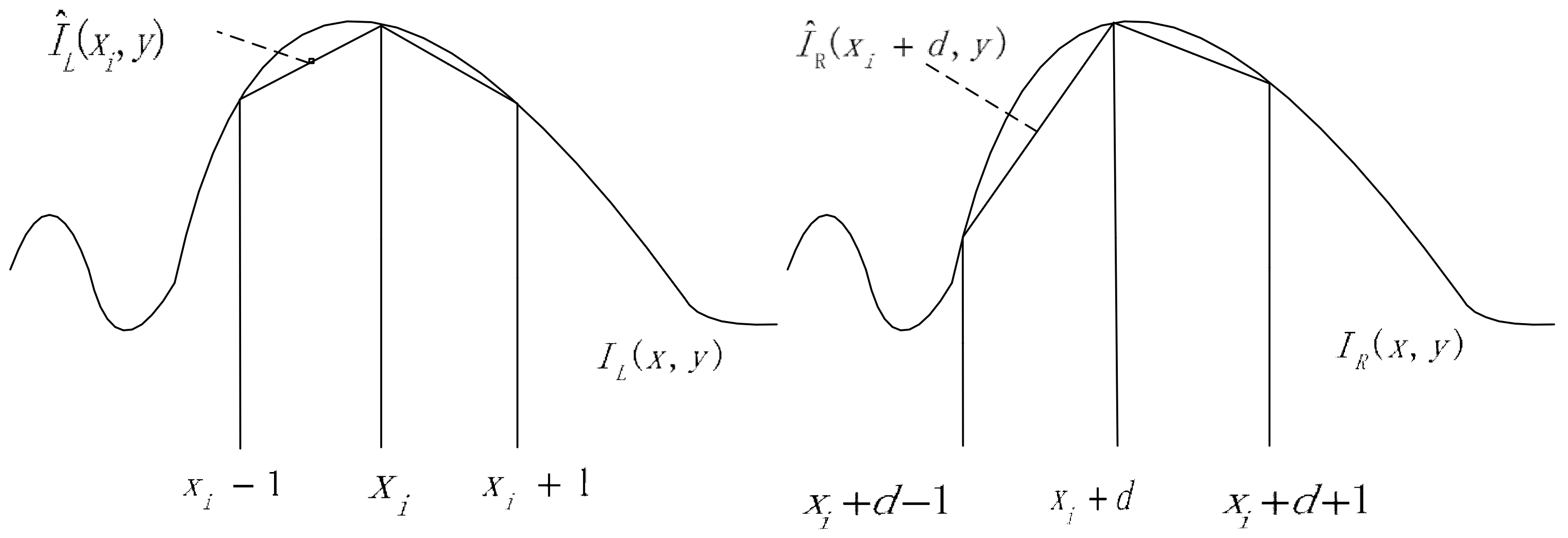
- Calculate the sub-pixel interpolation of the center point of the left and right neighborhoods and the focus of the adjacent pixels, respectively. The cost can be obtained.
- (5)
- Normalize and . Fuse them according to the corresponding scale factor. The matching cost can then be obtained.
- (6)
- Repeat steps 2 to 5 until the parallax search range is exceeded.
- (7)
- Select the neighborhood with the smallest matching cost within the disparity range of the right image. The corresponding center point is the pixel that matches the points.
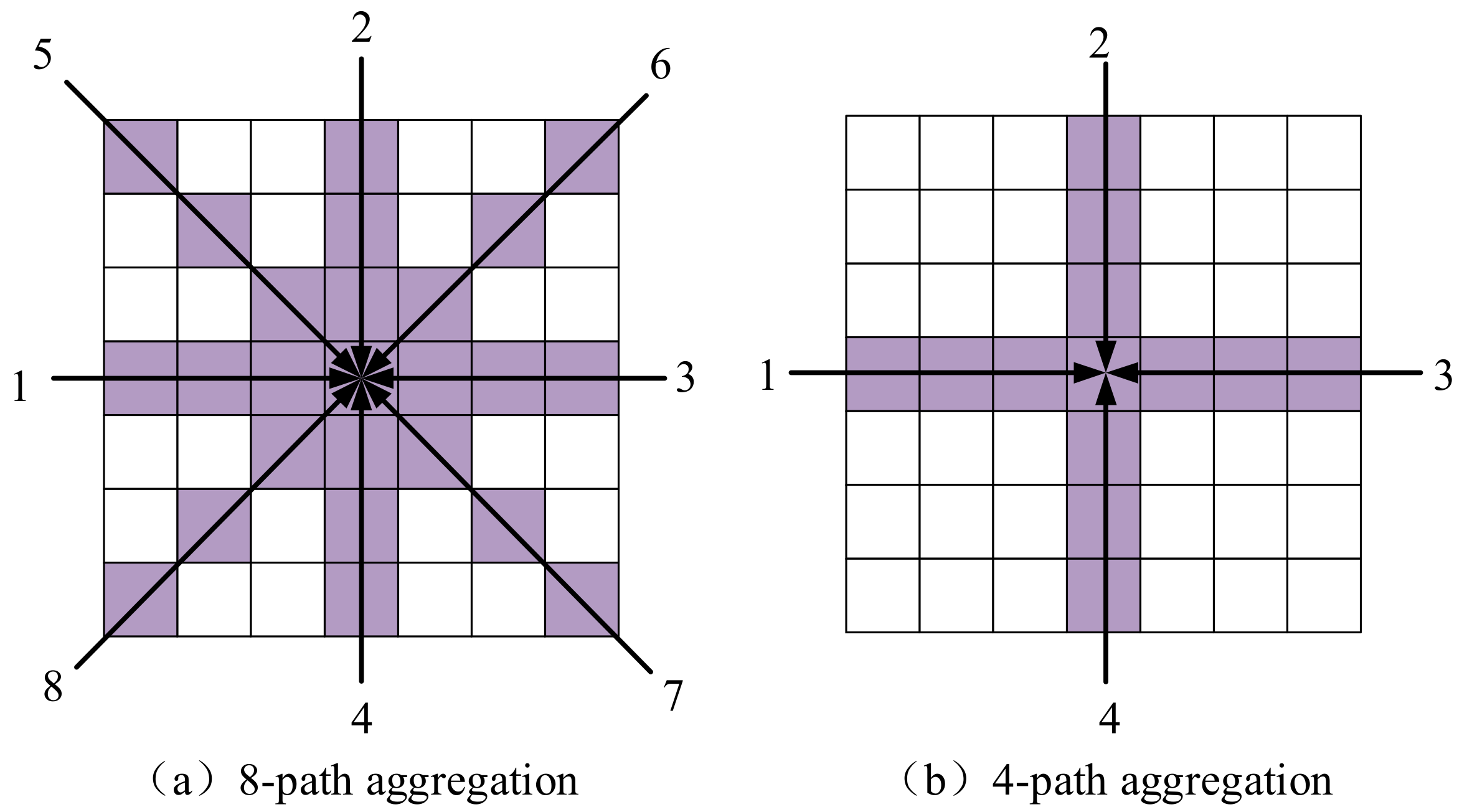
2.2.2. Cost Aggregation
2.2.3. Parallax Optimization
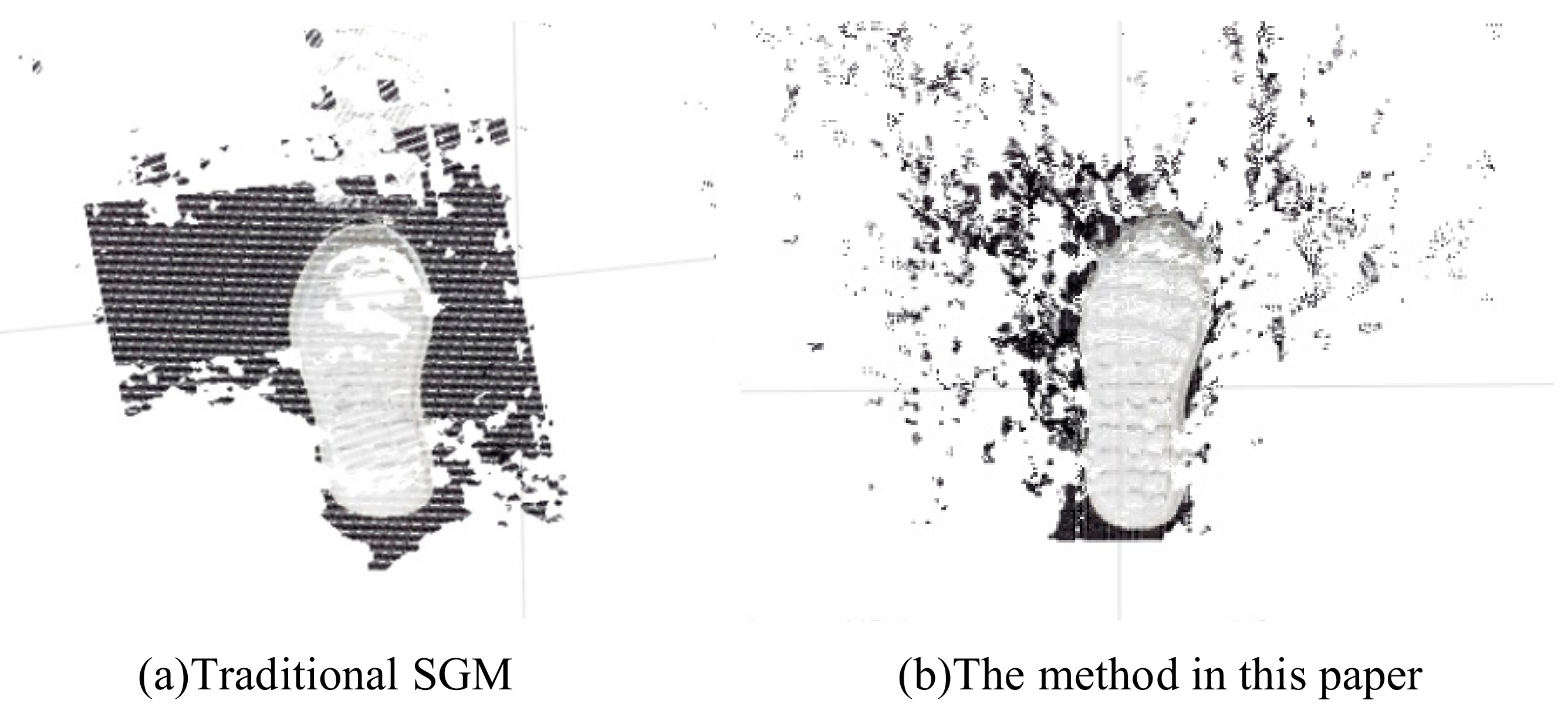
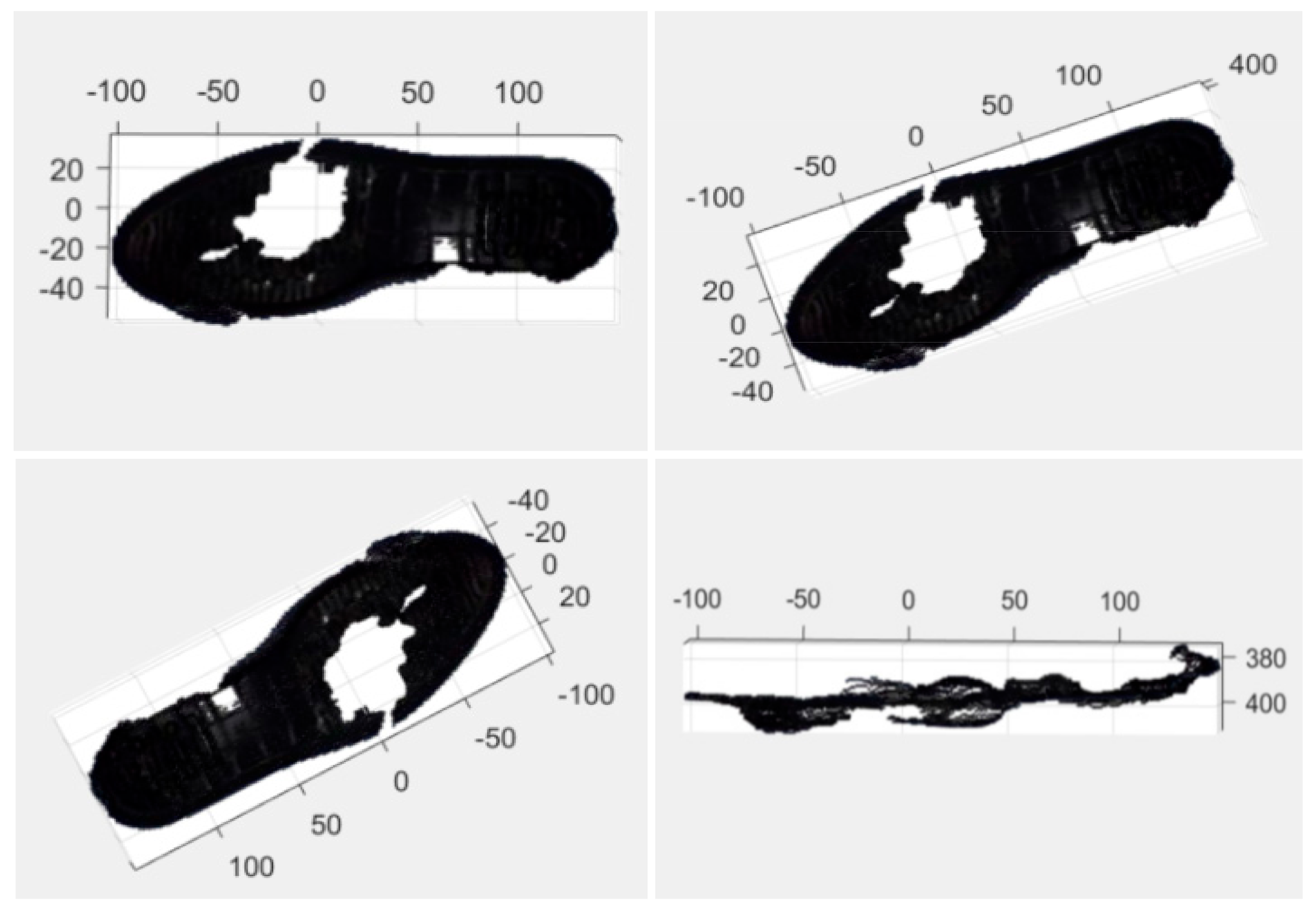
2.2.4. 3D Reconstruction
3. Experimental Verification and Result Analysis
- (1)
- Experiment 1
- (2)
- Experiment 2
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Su, C.Y. In 2020, the global footwear industry production and trade both decline, and China’s production and sales still rank first. Beijing Leather 2021, 46, 74. [Google Scholar]
- Zhu, W.C. The future development trend of China’s shoe industry. Fujian Text. 2015, 5, 24. [Google Scholar]
- Ye, X.J. Challenges and opportunities coexist in China’s shoe industry. West Leather 2015, 13, 14–16. [Google Scholar]
- Ren, F.; Yu, X.; Dang, W.M. Depressive symptoms in Chinese assembly-line migrant workers: A case study in the shoe-making industry [J]. Asia-pacific psychiatry. Off. J. Pac. Rim Coll. Psychiatr. 2019, 11, 12332. [Google Scholar]
- Huang, G. Binocular vision system realizes real-time tracking of badminton. J. Electron. Meas. Instrum. 2021, 35, 117–123. [Google Scholar]
- Shi, L.; Zhu, H.H.; Yu, Y.; Cui, X.; Hui, L.; Chu, S.B.; Yang, L.; Zhang, S.K.; Zhou, Y. Research on wave parameter remote measurement method based on binocular stereo vision. J. Electron. Meas. Instrum. 2019, 33, 99–104. [Google Scholar]
- Chong, A.X.; Yin, H.; Liu, Y.T.; Liu, X.B.; Xu, H.L. Research on Longitudinal Displacement Measurement Method of Continuously Welded Rail Based on Binocular Vision. Chin. J. Sci. Instrum. 2019, 40, 82–89. [Google Scholar]
- Li, Z.Z.; Jiang, K.Y.; Lin, J.Y. Edge stereo matching algorithm of sole based on extreme constraint. Comput. Eng. Appl. 2016, 52, 217–220. [Google Scholar]
- Ding, D.K.; Shu, Y.F.; Xie, C.X. Application of Machine Vision in the Recognition of Motion Trajectory for Shoe Machine. Mach. Des. Manuf. 2018, 2, 257–259+262. [Google Scholar]
- Pagano, S.; Russo, R.; Savino, S. A vision guided robotic system for flexible gluing process in the footwear industry. Robot. Comput.-Integr. Manuf. 2020, 65, 101965. [Google Scholar] [CrossRef]
- Zhu, K.Y.; Wu, J.H. An Algorithm for Extracting Spray Trajectory Based on Laser Vision; Institute of Electrical and Electronics Engineers: Piscataway, NJ, USA, 2017; pp. 1591–1595. [Google Scholar]
- Ma, X.W.; Gan, Y. Research About Acquiring Sole Edge Information Based on Binocular Stereo Vision. Electron. Sci. Technol. 2017, 30, 58–62. [Google Scholar]
- Luo, J.F.; Qiu, G.; Zhang, Y.; Feng, S.; Han, L. Surf binocular vision matching algorithm based on adaptive dual thresh-old. Chin. J. Sci. Instrum. 2020, 41, 240–247. [Google Scholar]
- Yan, J.; Cao, Y.D.; Qu, Z. Stereo Matching Algorithm Based on Improved Census Transform. J. Liaoning Univ. Technol. (Nat. Sci. Ed.) 2021, 41, 11–14+37. [Google Scholar]
- Xiao, H.; Tian, C.; Zhang, Y.; Wei, B. Stereo matching algorithm based on improved Census transform and gradient fusion. Laser Optoelectron. Prog. 2021, 58, 327–333. [Google Scholar]
- Yu, C.H.; Zhang, J. Research on SAD-based stereo matching algorithm. J. Shenyang Inst. Aeronaut. Eng. 2019, 36, 77–83. [Google Scholar]
- Zhu, J.H.; Wang, C.S.; Gao, M.F. An improved matching algorithm of Census transform and adaptive window. Laser Optoelectron. Prog. 2021, 58, 427–434. [Google Scholar]
- Lin, J.; Kin, Y.; Lee, S. A Census transform-based robust stereo matching under radiometric changes. In Proceedings of the 2016 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference, Jeju, Korea, 13–15 December 2016; pp. 1–4. [Google Scholar]
- Jia, K.B.; Du, Y.B. Stereo matching algorithm based on neighborhood information constraint and adaptive window. J. Beijing Univ. Technol. 2020, 46, 466–475. [Google Scholar]
- Jia, M.F.; Hu, G.Q.; Lu, C.Z. Research on automatic glue spray system based on image processing. Manuf. Autom. 2017, 39, 116–119. [Google Scholar]
- Sun, S. Research on Six-axis Robot Online Gluing System Based on Line Structured Light Vision Measuremen Technology; Anhui University of Technology: Ma’anshan, China, 2020. [Google Scholar]
- Hua, B.L.; Kai, W.W.; Kai, L.Y.; Rui, Q.C.; Chen, W.; Lei, F. Unconstrained self-calibration of stereo camera on visually impaired as-sistance devices. Appl. Opt. 2019, 58, 6377–6387. [Google Scholar]
- Bang, L.G.; Ying, J.Y.; Ang, S.; Yang, S.; Qi, F.Y. Self-calibration approach to stereo cameras with radial distortion based on epipolar constraint. Appl. Opt. 2019, 58, 8511–8521. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Translation Matrix | |
| Rotation Matrix |
| Parameter | Left Camera | Right Camera |
|---|---|---|
| Internal parameter Matrix | ||
| Distortion Coefficient |
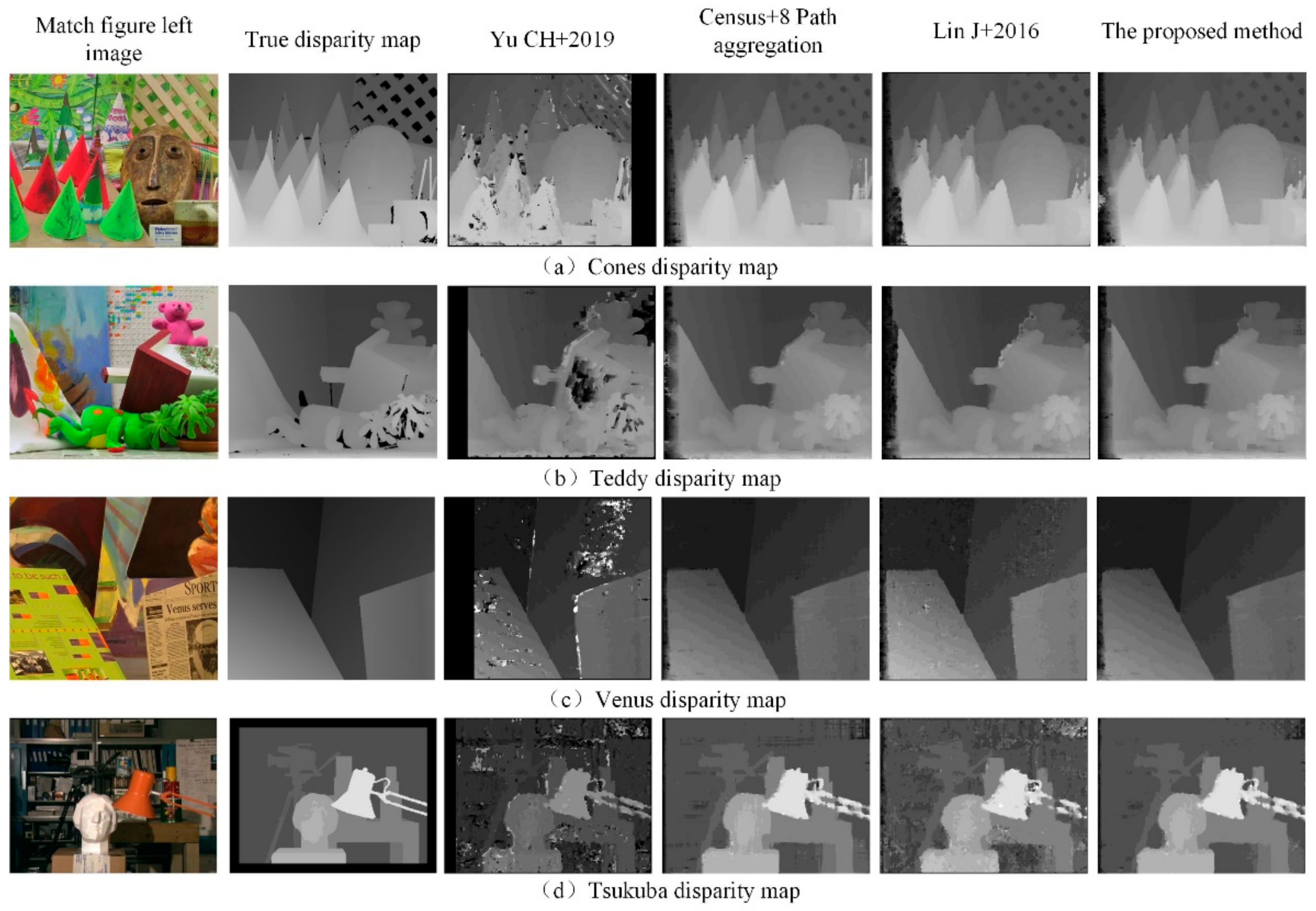
| Method | Reference [16] | Census+8 Path Aggregation | Reference [18] | The Proposed Method | |
|---|---|---|---|---|---|
| Cones | Mismatch Rate (%) | 32.24 | 10.39 | 11.11 | 6.88 |
| Running Time (s) | 1.98 | 23.37 | 10.45 | 6.60 | |
| Teddy | Mismatch Rate (%) | 36.54 | 14.16 | 15.90 | 7.61 |
| Running Time (s) | 2.43 | 23.35 | 9.31 | 5.85 | |
| Venus | Mismatch Rate (%) | 28.52 | 9.26 | 9.26 | 5.85 |
| Running Time (s) | 1.60 | 21.38 | 9.77 | 5.62 | |
| Tsukuba | Mismatch Rate (%) | 24.49 | 8.40 | 13.28 | 5.94 |
| Running Time (s) | 1.69 | 19.34 | 7.24 | 4.65 | |
| Average | Mismatch Rate (%) | 30.45 | 10.55 | 12.52 | 6.57 |
| Running Time (s) | 1.93 | 21.86 | 9.19 | 5.68 | |
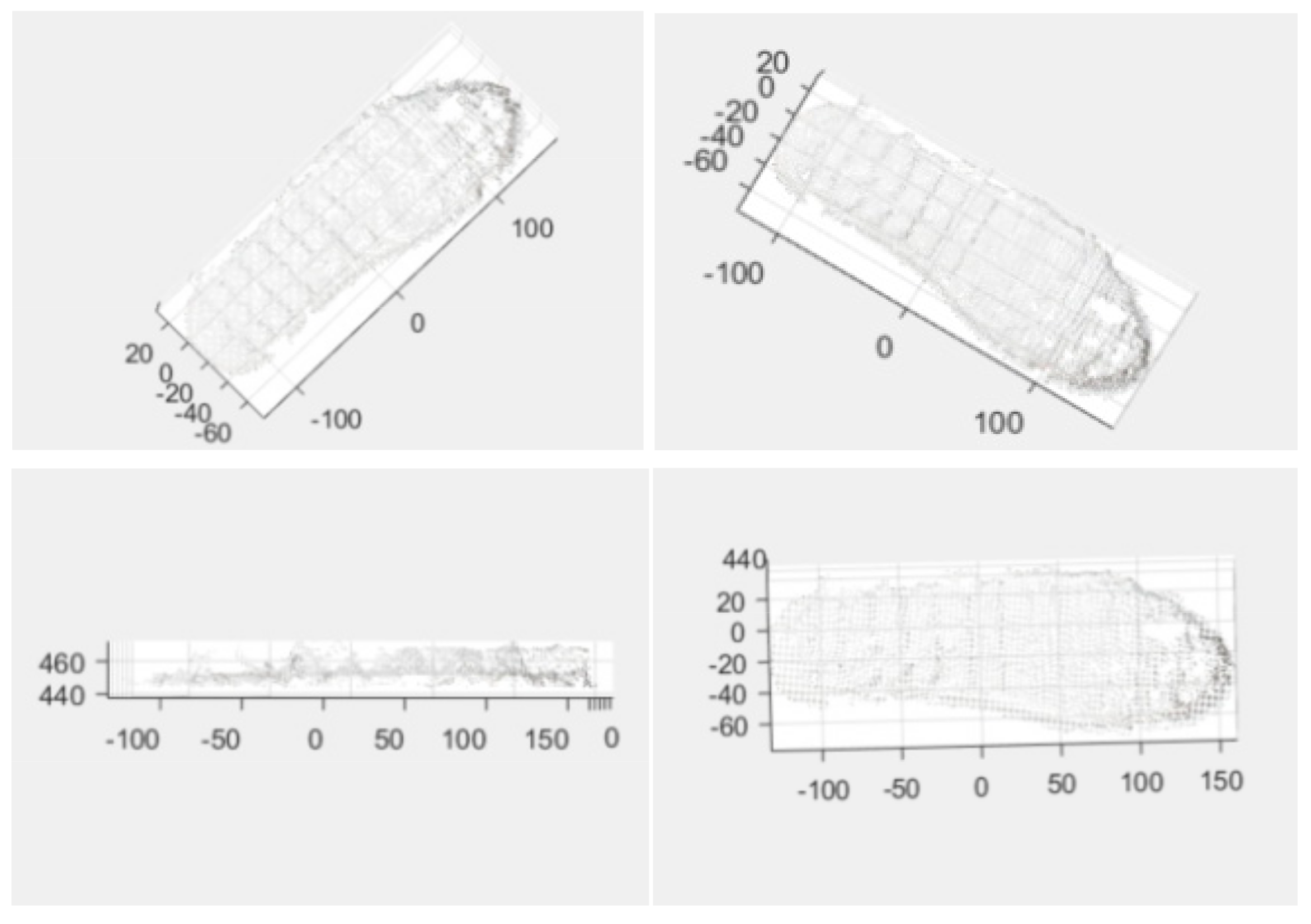
| Indicators | Heel Center Height Difference (mm) | Height Difference in Toe Center (mm) | Distance between Toe and Heel Center (mm) | |
|---|---|---|---|---|
| Sneaker Soles | Measurement | 30.1 | 27.5 | 294 |
| Actual | 29.9 | 26.2 | 293.5 | |
| Leather Shoe Sole | Measurement | 31 | 13 | 253.71 |
| Actual | 30.3 | 13.5 | 255 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Wei, L.; Gu, Z.; Liu, X. Three-Dimensional Reconstruction of Shoe Soles via Binocular Vision Based on Improved Matching Cost. Mathematics 2022, 10, 3548. https://doi.org/10.3390/math10193548
Wang R, Wei L, Gu Z, Liu X. Three-Dimensional Reconstruction of Shoe Soles via Binocular Vision Based on Improved Matching Cost. Mathematics. 2022; 10(19):3548. https://doi.org/10.3390/math10193548
Chicago/Turabian StyleWang, Rui, Lisheng Wei, Zhengyan Gu, and Xiaohui Liu. 2022. "Three-Dimensional Reconstruction of Shoe Soles via Binocular Vision Based on Improved Matching Cost" Mathematics 10, no. 19: 3548. https://doi.org/10.3390/math10193548
APA StyleWang, R., Wei, L., Gu, Z., & Liu, X. (2022). Three-Dimensional Reconstruction of Shoe Soles via Binocular Vision Based on Improved Matching Cost. Mathematics, 10(19), 3548. https://doi.org/10.3390/math10193548