
Geometric Compatibility Indexes in a Local AHP-Group Decision Making Context: A Framework for Reducing Incompatibility



Abstract
:1. Introduction
2. Background
2.1. AHP in a Multiactor Decision Making Context
2.2. Compatibility in AHP-GDM
3. Compatibility Indexes in AHP
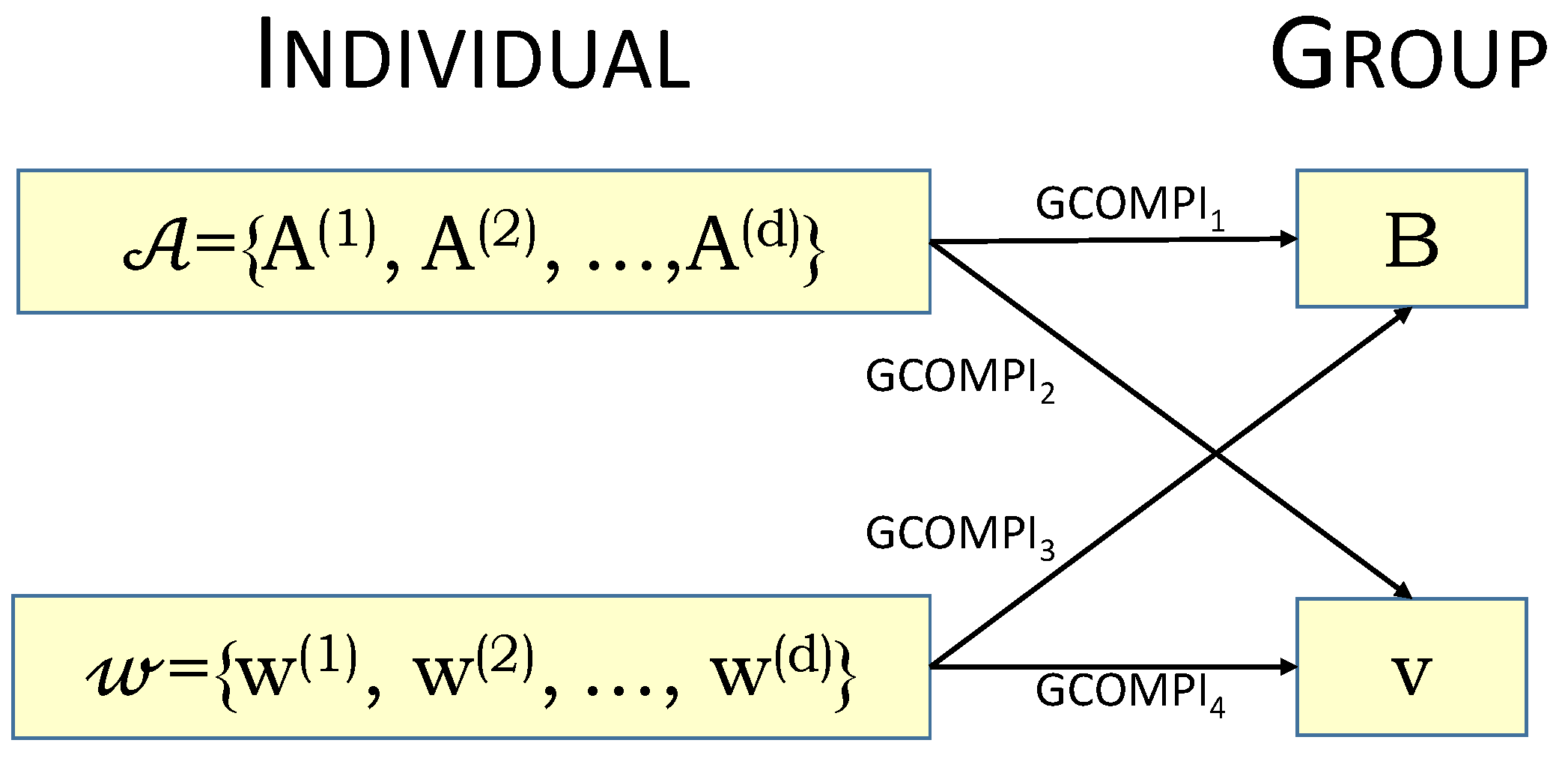
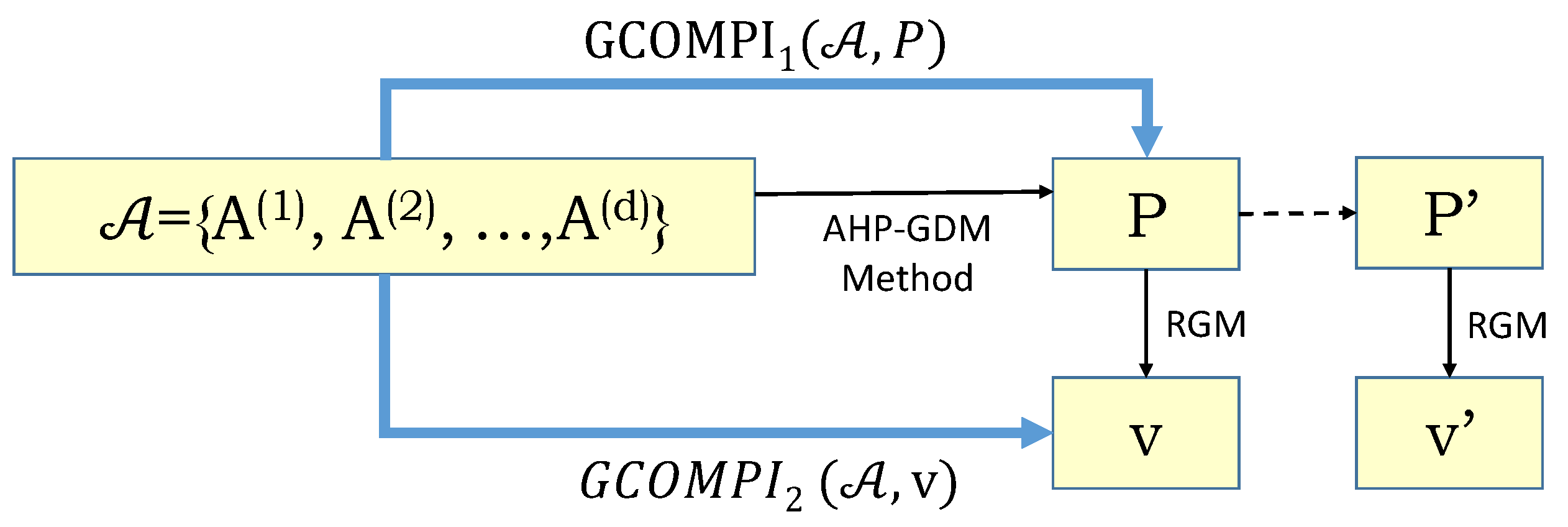
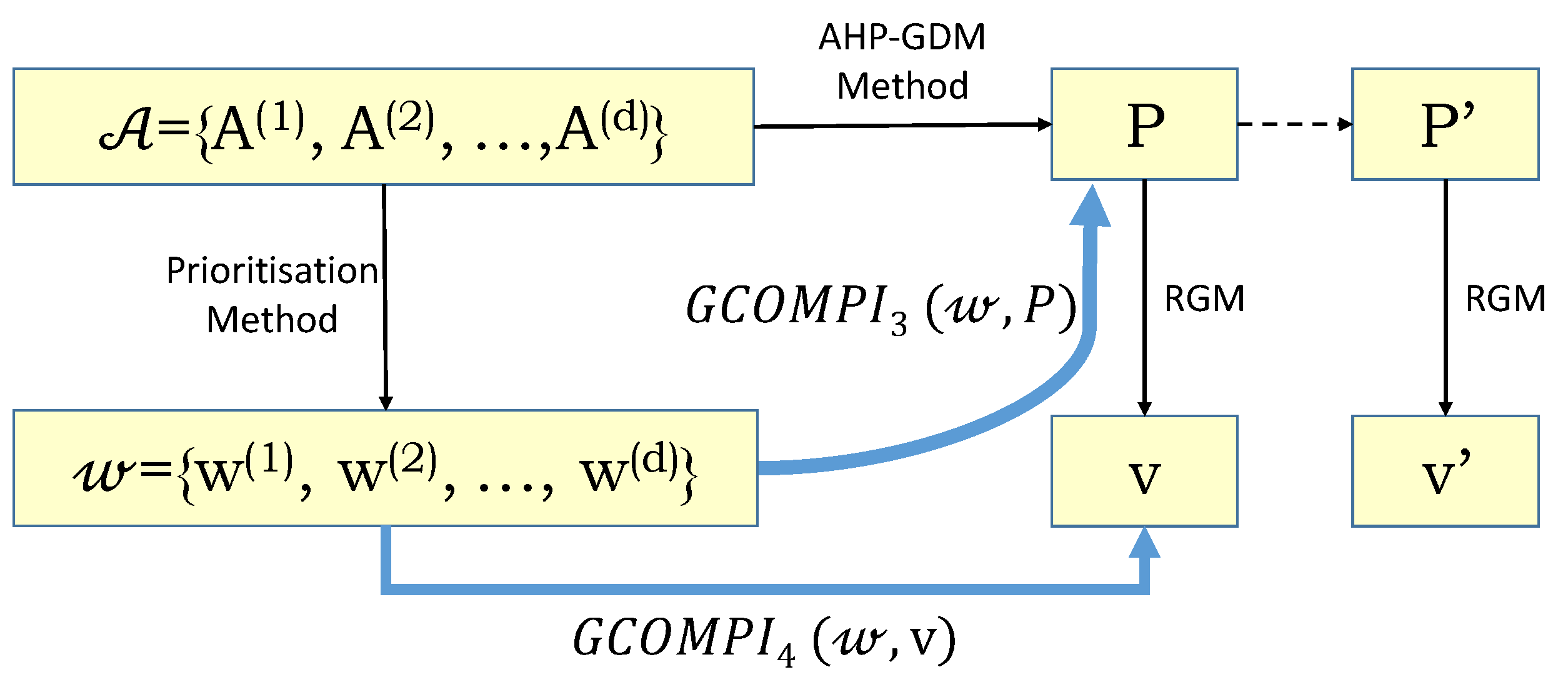
3.1. Geometric Compatibility Indexes. Basic Definitions
3.2. Geometric Compatibility Indexes for Families of Matrices and Vectors
4. A Theoretical Framework for Reducing Geometric Compatibility Measures in a Local Context
4.1.
4.2.
4.3.
4.4.
5. Procedure for Incompatibility Reduction and Numerical Example
5.1. Semi-Automatic Procedure for Incompatibility Reduction
- Step 0.
- Let .
- Step 1.
- Evaluate for all .
- Step 2.
- Choose the pair for which has the largest absolute value.
- Step 3.
- If then let . Otherwise, let .
- Step 4.
- Modify using expression (39).
- Step 5.
- Update matrix P with new values and .Update .
- Step 6.
- If J is empty or , stop and provide . Otherwise go to Step 1.
5.2. Numerical Example
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Saaty, T.L. A scaling method for priorities in hierarchical structures. J. Math. Psychol. 1977, 15, 234–281. [Google Scholar] [CrossRef]
- Saaty, T.L. Multicriteria Decision Making: The Analytic Hierarchy Process; McGraw-Hill: New York, NY, USA, 1980. [Google Scholar]
- Altuzarra, A.; Moreno-Jiménez, J.M.; Salvador, M. Consensus Building in AHP-Group Decision Making: A Bayesian Approach. Oper. Res. 2010, 58, 1755–1773. [Google Scholar] [CrossRef]
- Altuzarra, A.; Gargallo, P.; Moreno-Jiménez, J.M.; Salvador, M. Homogeneous Groups of Actors in an AHP-Local Decision Making Context: A Bayesian Analysis. Mathematics 2019, 7, 294. [Google Scholar] [CrossRef] [Green Version]
- Aguarón, J.; Escobar, M.T.; Moreno-Jiménez, J.M. Reducing incompatibility in a local AHP-Group Decision Making context. Forthcoming.
- Saaty, T.L. Decision-making with the AHP: Why is the principal eigenvector necessary. Eur. J. Oper. Res. 2003, 145, 85–91. [Google Scholar] [CrossRef]
- Crawford, G.; Williams, C. A note on the analysis of subjective judgment matrices. J. Math. Psychol. 1985, 29, 387–405. [Google Scholar] [CrossRef]
- Saaty, T. Fundamentals of Decision Making and Priority Theory with the Analytic Hierarchy Process; AHP Series; RWS Publications: Pittsburgh, PA, USA, 1994. [Google Scholar]
- Aguarón, J.; Moreno-Jiménez, J.M. The Geometric Consistency Index: Approximated Thresholds. Eur. J. Oper. Res. 2003, 147, 137–145. [Google Scholar] [CrossRef]
- Saaty, T.L. Group Decision Making and the AHP. In The Analytic Hierarchy Process: Applications and Studies; Golden, B.L., Wasil, E.A., Harker, P.T., Eds.; Springer: Berlin/Heidelberg, Germany, 1989; pp. 59–67. [Google Scholar] [CrossRef]
- Ramanathan, R.; Ganesh, L. Group preference aggregation methods employed in AHP: An evaluation and an intrinsic process for deriving members’ weightages. Eur. J. Oper. Res. 1994, 79, 249–265. [Google Scholar] [CrossRef]
- Forman, E.; Peniwati, K. Aggregating individual judgments and priorities with the analytic hierarchy process. Eur. J. Oper. Res. 1998, 108, 165–169. [Google Scholar] [CrossRef]
- Aguarón, J.; Escobar, M.T.; Moreno-Jiménez, J.M.; Turón, A. The Triads Geometric Consistency Index in AHP-pairwise comparison matrices. Mathematics 2020, 8, 926. [Google Scholar] [CrossRef]
- Garuti, C.E. A set theory justification of Garuti’s compatibility index. J. Multi-Criteria Decis. Anal. 2020, 27, 50–60. [Google Scholar] [CrossRef]
- Lipovetsky, S. Priority vector estimation: Consistency, compatibility, precision. Int. J. Anal. Hierarchy Process 2020, 12, 577–591. [Google Scholar] [CrossRef]
- Dong, Y.; Zhang, G.; Hong, W.C.; Xu, Y. Consensus models for AHP group decision making under row geometric mean prioritization method. Decis. Support Syst. 2010, 49, 281–289. [Google Scholar] [CrossRef]
- Escobar, M.T.; Aguarón, J.; Moreno-Jiménez, J.M. Some extensions of the precise consistency consensus matrix. Decis. Support Syst. 2015, 74, 67–77. [Google Scholar] [CrossRef]
- Garuti, C. Consistency & compatibility (two sides of the same coin). In Proceedings of the ISAHP 2016, London, UK, 4–7 August 2016. [Google Scholar] [CrossRef]
- Saaty, T. The Analyutic Network Process. Decision Making with Dependence and Feedback; AHP Series; RWS Publications: Pittsburgh, PA, USA, 1996. [Google Scholar]
- Garuti, C. Measuring compatibility (closeness) in weighted environments. In Proceedings of the International Symposium on the AHP, Vina del Mar, Chile, 2–6 August 2007. [Google Scholar]
- Lipovetsky, S. Global Priority Estimation in Multiperson Decision Making. J. Optim. Theory Appl. 2009, 140, 77–91. [Google Scholar] [CrossRef]
- Kahneman, D.; Tversky, A. Prospect Theory: An Analysis of Decision under Risk. Econometrica 1979, 47, 263–291. [Google Scholar] [CrossRef] [Green Version]
- Barzilai, J.; Golany, B. Ahp Rank Reversal, Normalization Furthermore, Aggregation Rules. INFOR Inf. Syst. Oper. Res. 1994, 32, 57–64. [Google Scholar] [CrossRef]
- Escobar, M.; Aguarón, J.; Moreno-Jiménez, J. A note on AHP group consistency for the row geometric mean priorization procedure. Eur. J. Oper. Res. 2004, 153, 318–322. [Google Scholar] [CrossRef]
- Grzybowski, A.Z. New results on inconsistency indices and their relationship with the quality of priority vector estimation. Expert Syst. Appl. 2016, 43, 197–212. [Google Scholar] [CrossRef] [Green Version]
- Aguarón, J.; Escobar, M.T.; Moreno-Jiménez, J.M. Reducing inconsistency measured by the geometric consistency index in the analytic hierarchy process. Eur. J. Oper. Res. 2021, 288, 576–583. [Google Scholar] [CrossRef]
- Aguarón, J.; Escobar, M.T.; Moreno-Jiménez, J.M.; Turón, A. AHP-Group Decision Making Based on Consistency. Mathematics 2019, 7, 242. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Jin, B.; Fujita, H.; Xu, J. Consensus analysis for AHP multiplicative preference relations based on consistency control: A heuristic approach. Knowl.-Based Syst. 2020, 191, 105317. [Google Scholar] [CrossRef]
- Turón, A.; Aguarón, J.; Escobar, M.T.; Moreno-Jiménez, J.M. A Decision Support System and Visualisation Tools for AHP-GDM. Int. J. Decis Support Syst. Technol. 2019, 11, 1–19. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
| Measure | |||
|---|---|---|---|
| Iteration t | |||||
|---|---|---|---|---|---|
| 0 | 0.484 | ||||
| 1 | (1–5) | 3.165 | 3.640 | 0.462 | 15.57% |
| 2 | (1–2) | 2.049 | 2.356 | 0.443 | 28.87% |
| 3 | (3–4) | 2.708 | 3.114 | 0.428 | 39.13% |
| 4 | (4–5) | 2.844 | 3.271 | 0.416 | 47.76% |
| 5 | (2–3) | 3.000 | 2.608 | 0.410 | 52.01% |
| 6 | (1–4) | 9.000 | 8.149 | 0.408 | 53.21% |
| 7 | (3–5) | 1.466 | 1.599 | 0.407 | 54.06% |
| 8 | (1–3) | 5.509 | 6.007 | 0.406 | 54.98% |
| 9 | (2–5) | 1.738 | 1.877 | 0.405 | 55.68% |
| 10 | (2–4) | 6.082 | 5.650 | 0.404 | 56.32% |
| P | 0.467 | 0.255 | 0.095 | 0.044 | 0.139 | 0.484 |
| 0.486 | 0.238 | 0.096 | 0.042 | 0.138 | 0.404 |
| #Iter | G | ||
|---|---|---|---|
| 56.32% | 5 | 0.9612 | |
| 73.10% | 5 | 0.9380 | |
| 44.11% | – | 0.9498 | |
| 73.10% | 5 | 0.9380 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aguarón, J.; Escobar, M.T.; Moreno-Jiménez, J.M.; Turón, A. Geometric Compatibility Indexes in a Local AHP-Group Decision Making Context: A Framework for Reducing Incompatibility. Mathematics 2022, 10, 278. https://doi.org/10.3390/math10020278
Aguarón J, Escobar MT, Moreno-Jiménez JM, Turón A. Geometric Compatibility Indexes in a Local AHP-Group Decision Making Context: A Framework for Reducing Incompatibility. Mathematics. 2022; 10(2):278. https://doi.org/10.3390/math10020278
Chicago/Turabian StyleAguarón, Juan, María Teresa Escobar, José María Moreno-Jiménez, and Alberto Turón. 2022. "Geometric Compatibility Indexes in a Local AHP-Group Decision Making Context: A Framework for Reducing Incompatibility" Mathematics 10, no. 2: 278. https://doi.org/10.3390/math10020278
APA StyleAguarón, J., Escobar, M. T., Moreno-Jiménez, J. M., & Turón, A. (2022). Geometric Compatibility Indexes in a Local AHP-Group Decision Making Context: A Framework for Reducing Incompatibility. Mathematics, 10(2), 278. https://doi.org/10.3390/math10020278