
The Instability and Response Studies of a Top-Tensioned Riser under Parametric Excitations Using the Differential Quadrature Method


Abstract
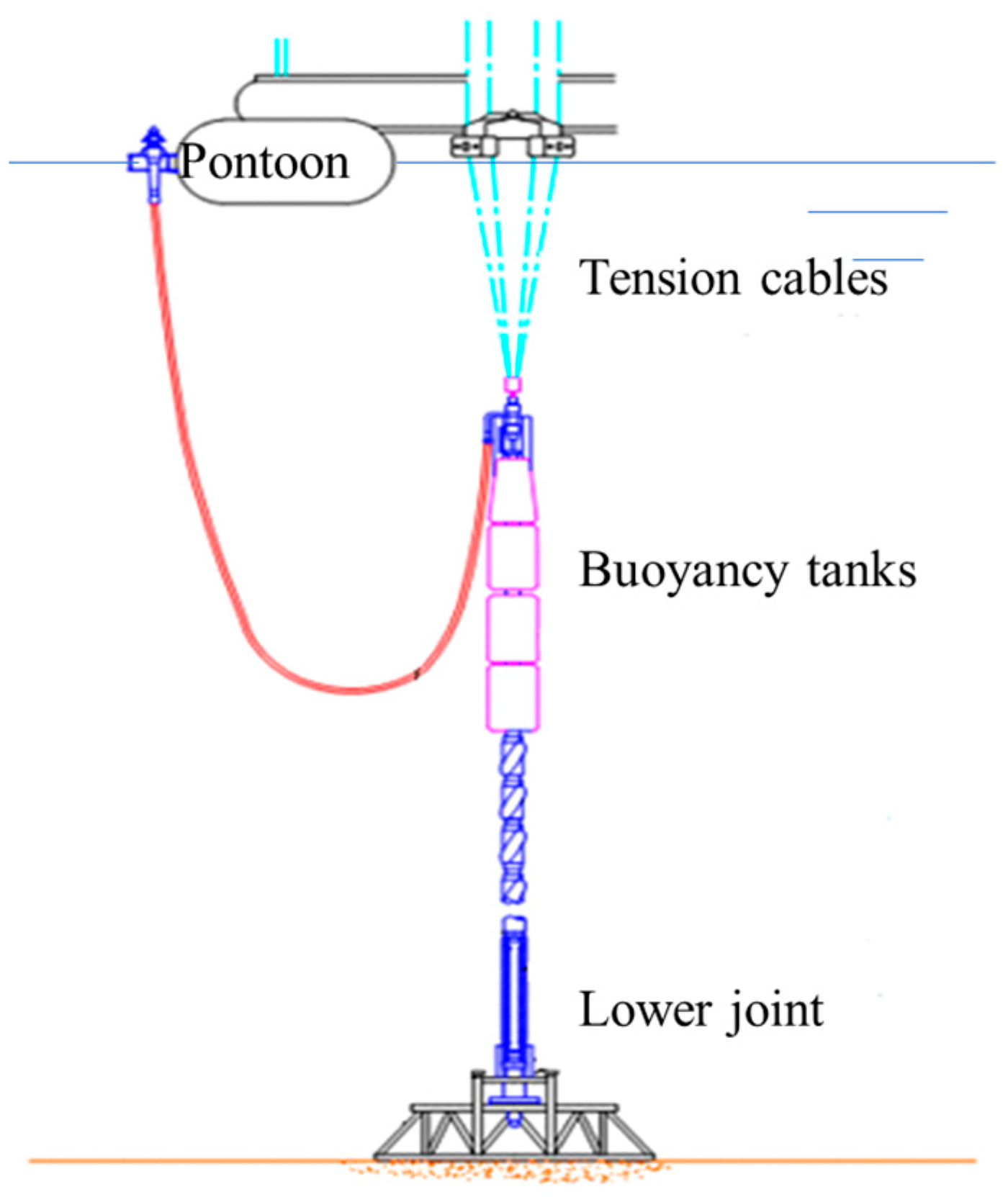
:1. Introduction
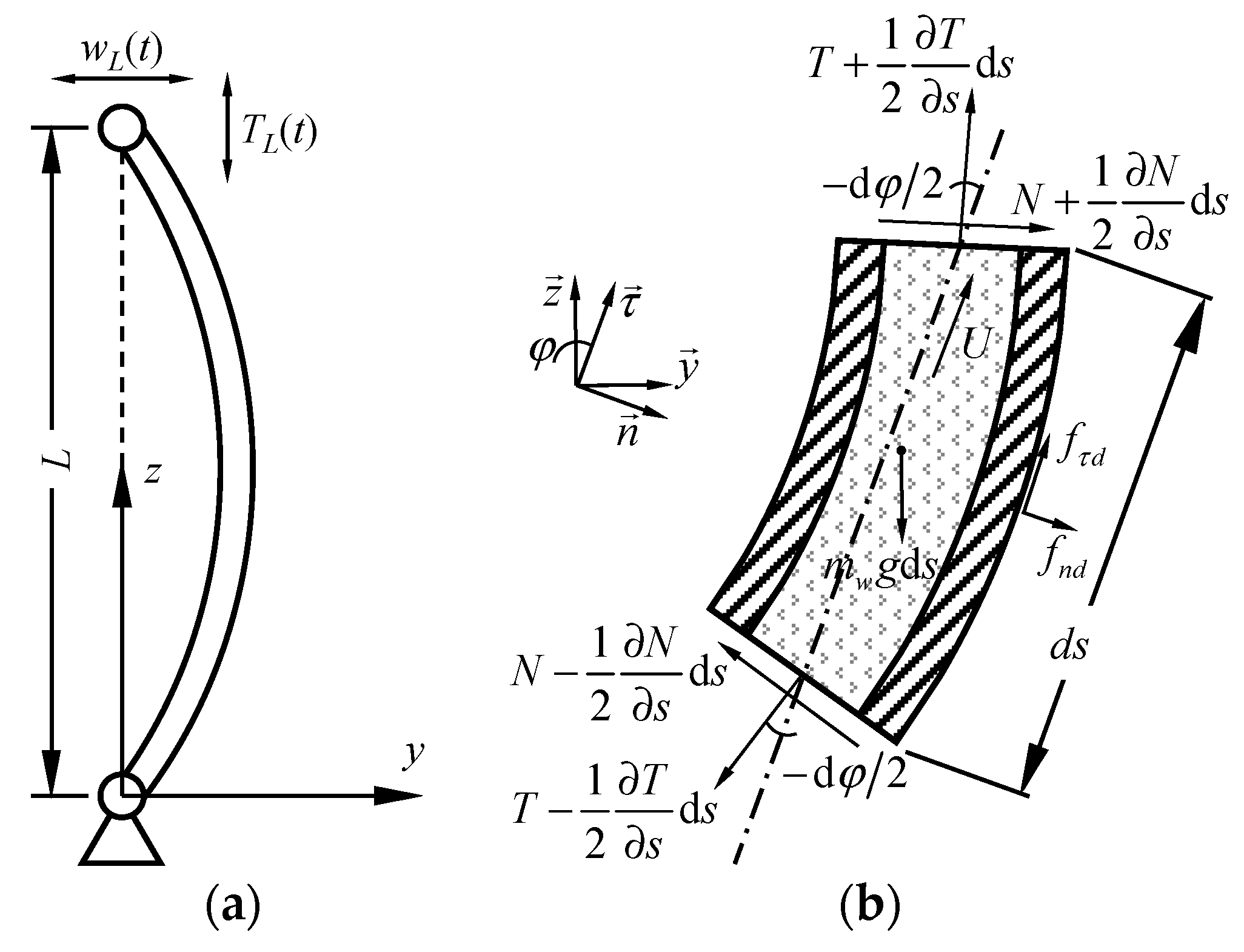
2. Modelling and Method
2.1. Governing Equation of Parametric Vibration
2.2. Galerkin’s Method and Derivation of Mathieu Equation
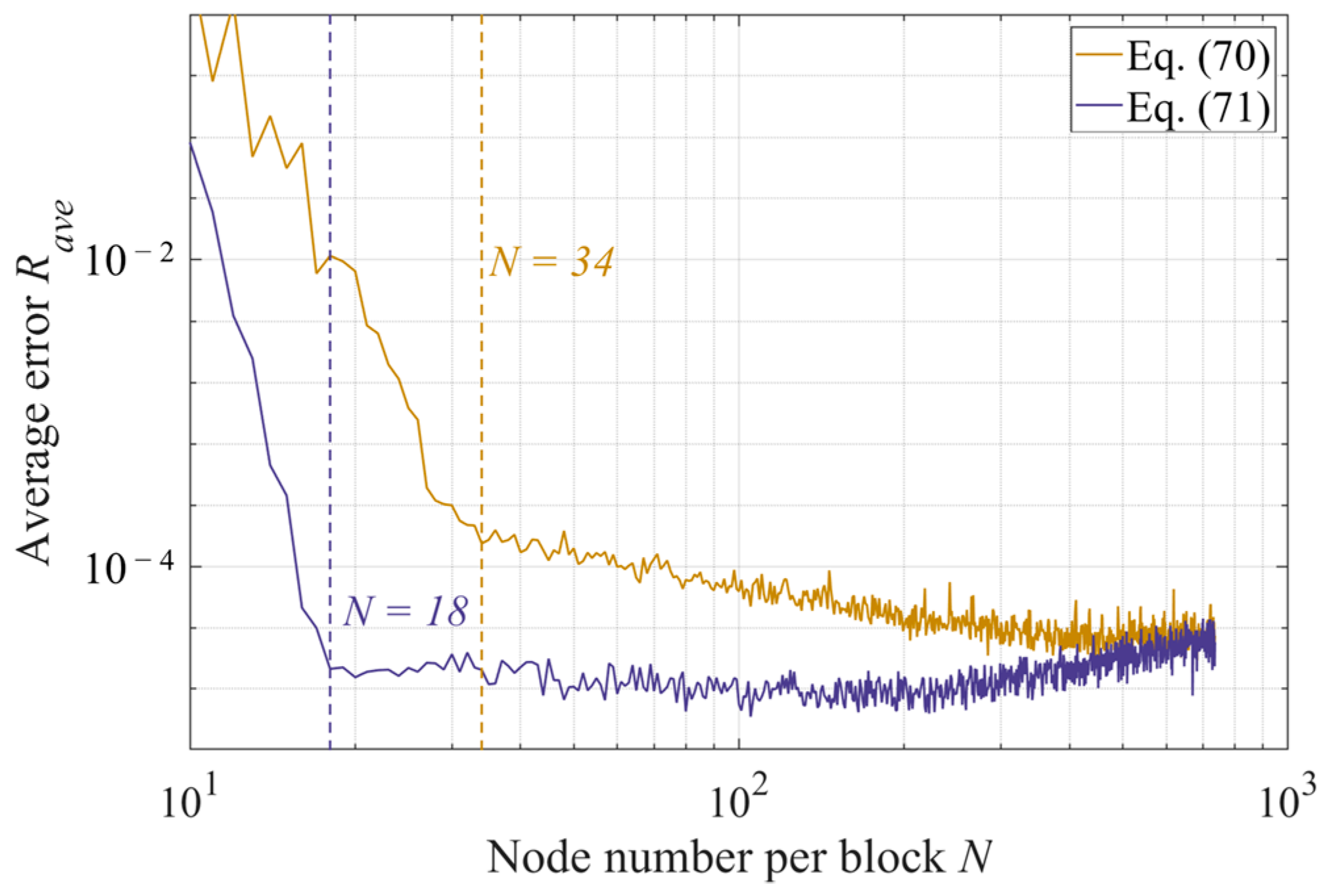
2.3. The Differential Quadrature Solution Scheme for Risers’ Parametric Vibration
2.4. Analytical Solution for Mathieu Instability
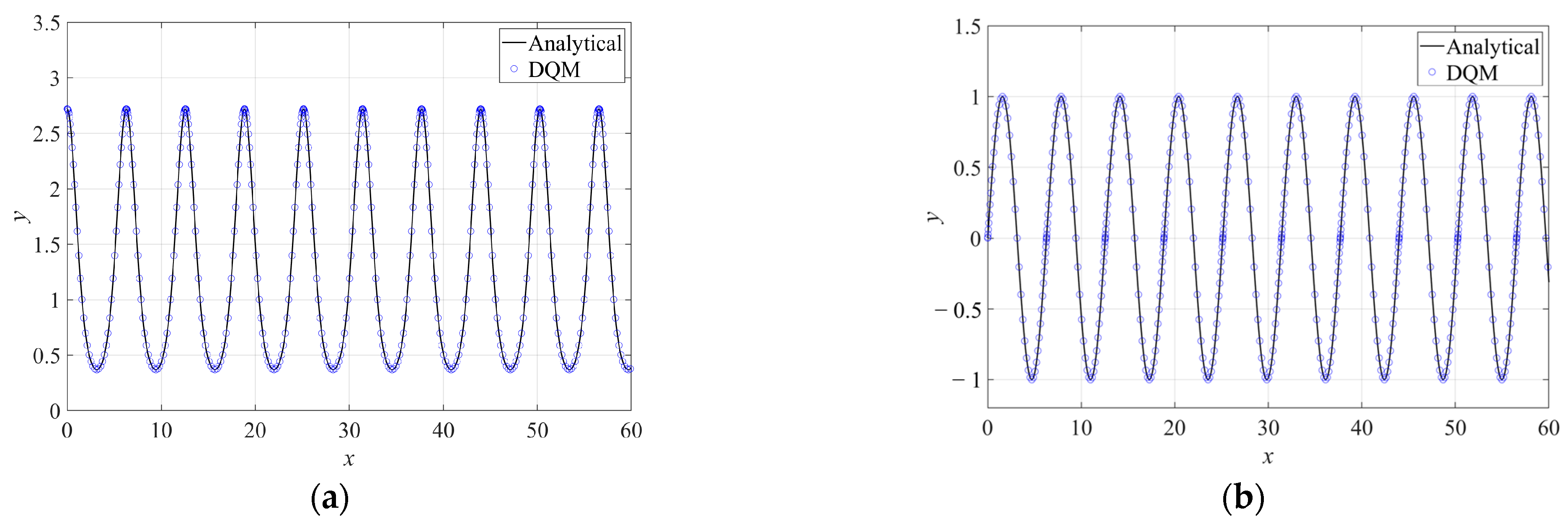
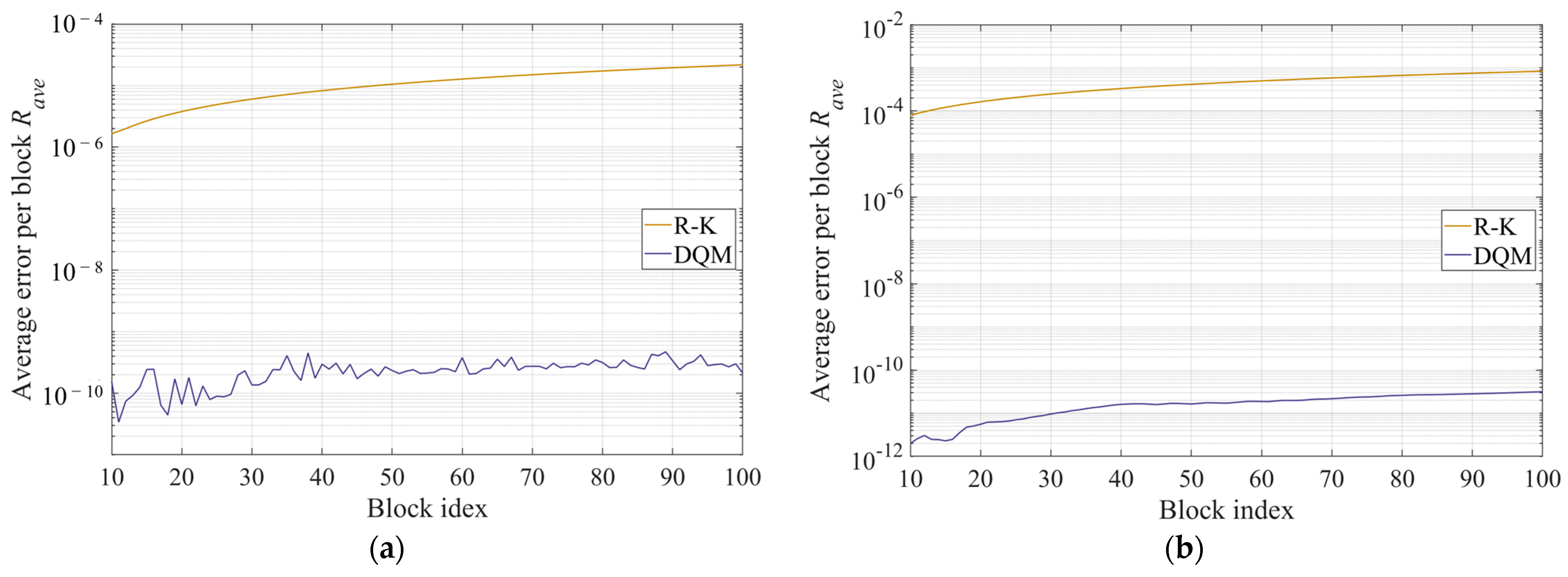
3. Verification and Validation of DQM
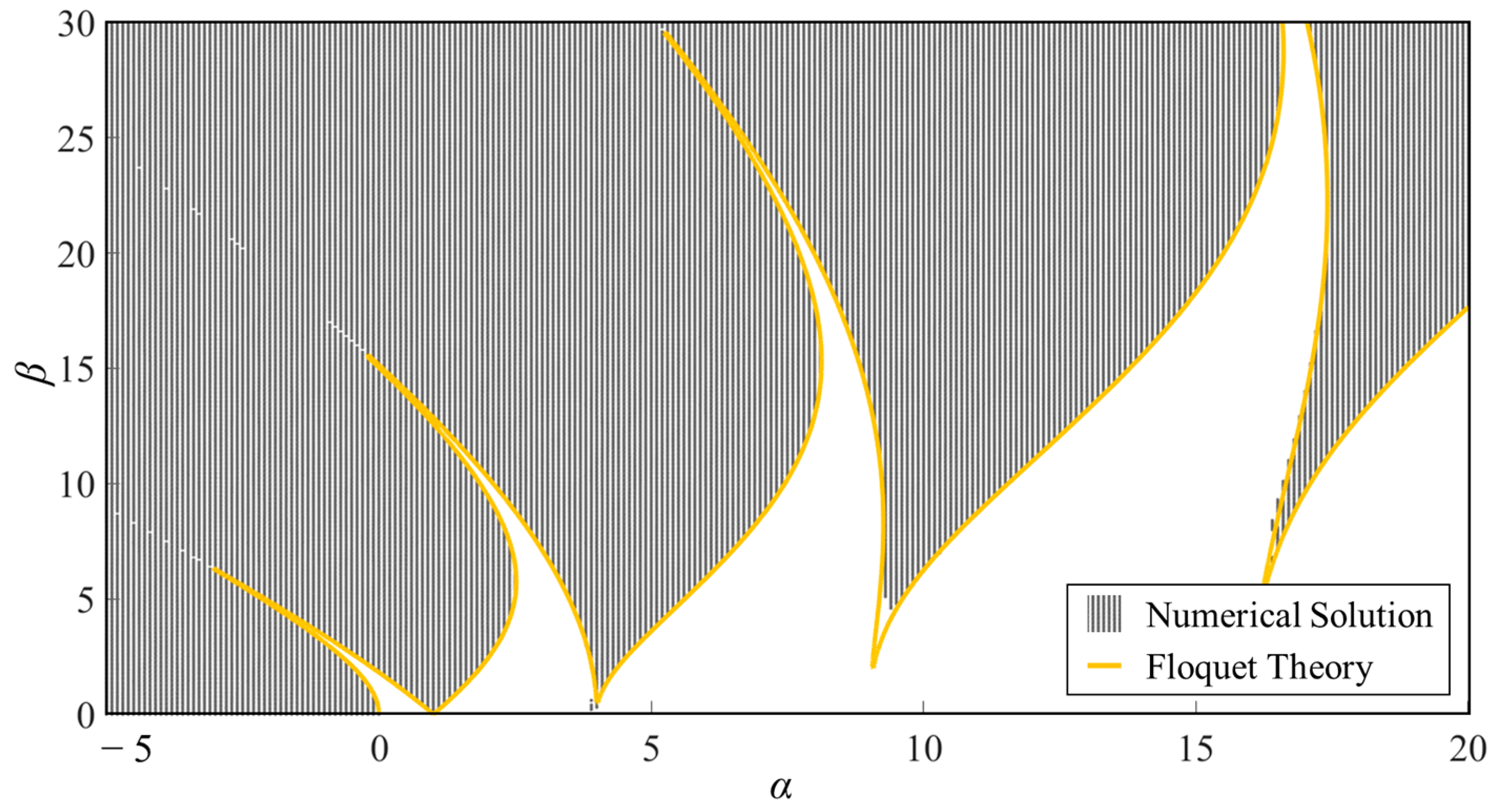
4. Instability Analysis of a Top-Tensioned Riser
4.1. DQM Solution for Mathieu Equation
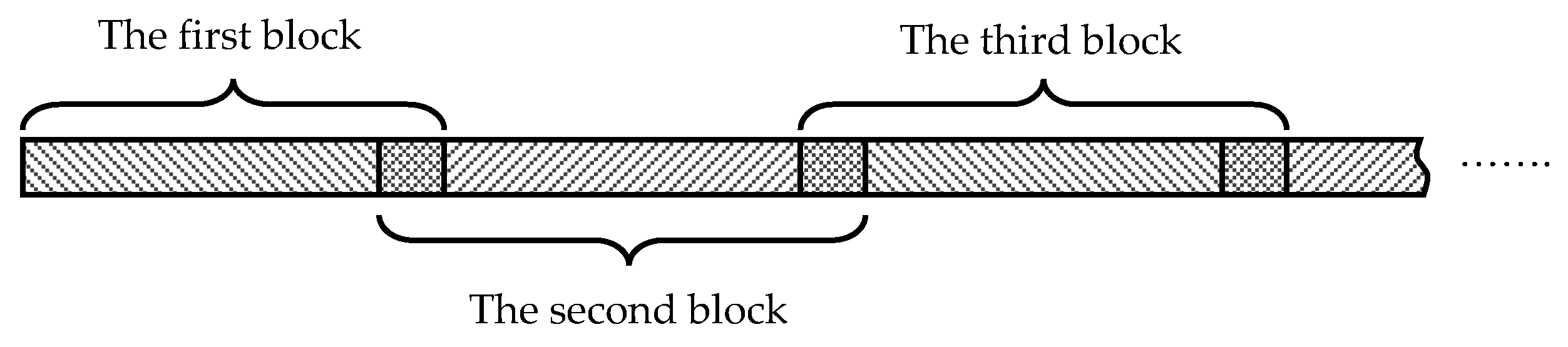
- Separate the long-time-scope solutions into blocks with lengths of 2π;
- Extract the maximum of each block;
- Compare the maxima between every neighboring block, and if the maximum is increasing block by block, we define the solution for the current example as divergent;
- For the examples that fail the test in step three, calculate the ratio of the maximum of the last block and that of the initial block, and if the ratio is bigger than 100, we define the solution for the current example as divergent; otherwise, it is defined as convergent.
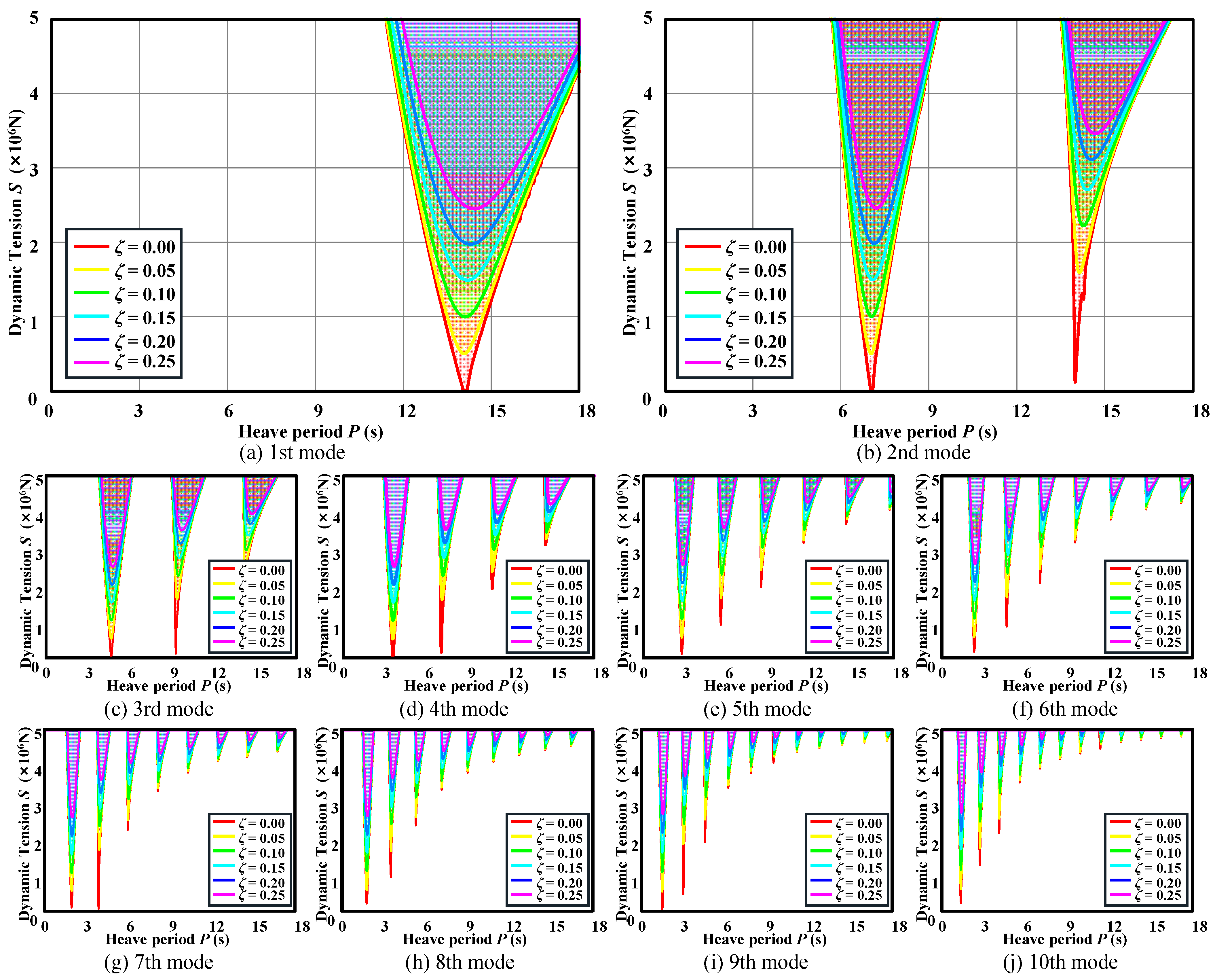
4.2. Instabilities of Risers with Different Damping Coefficients
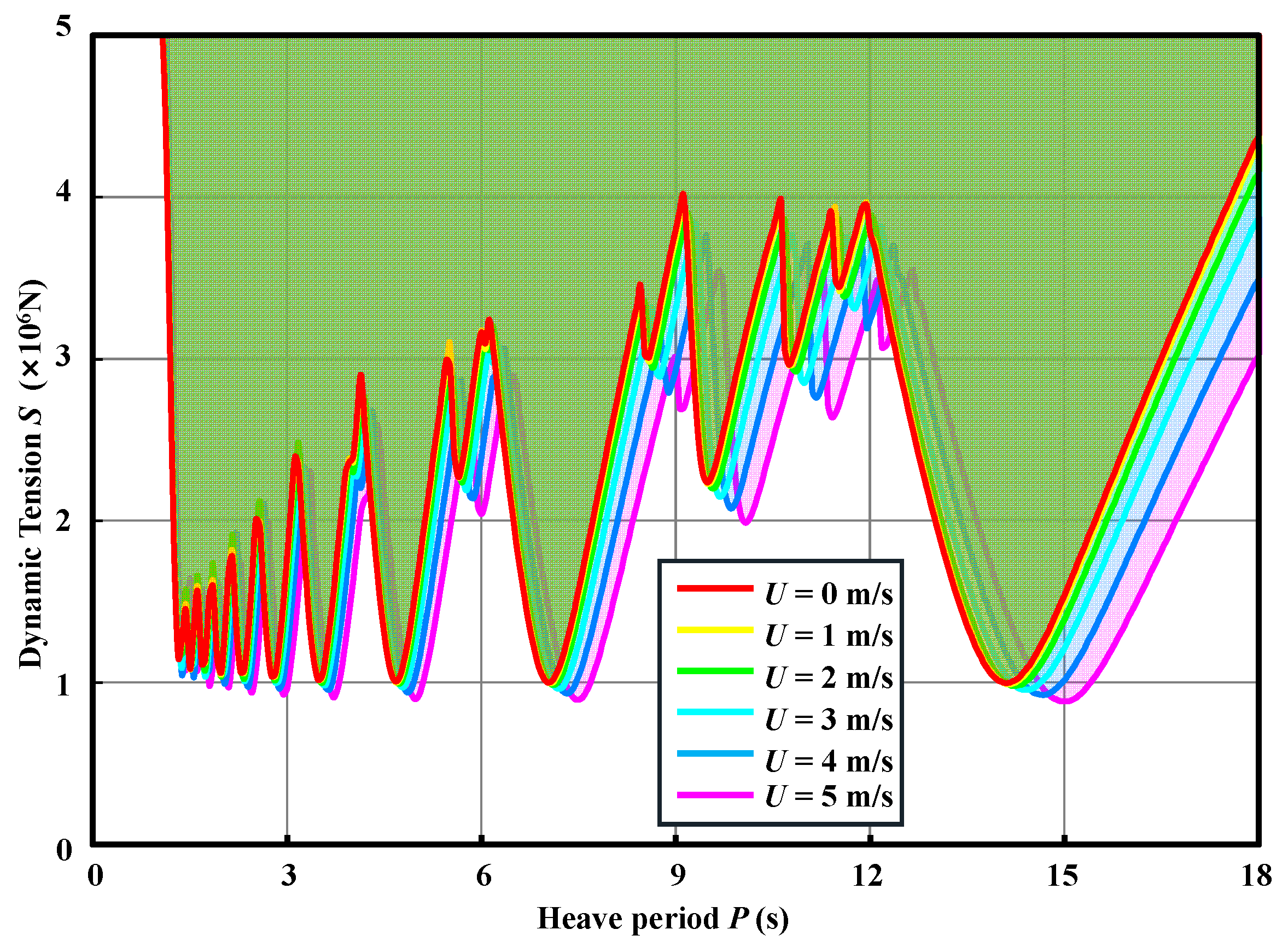
4.3. Instabilities of Risers with Different Internal Flow Velocity
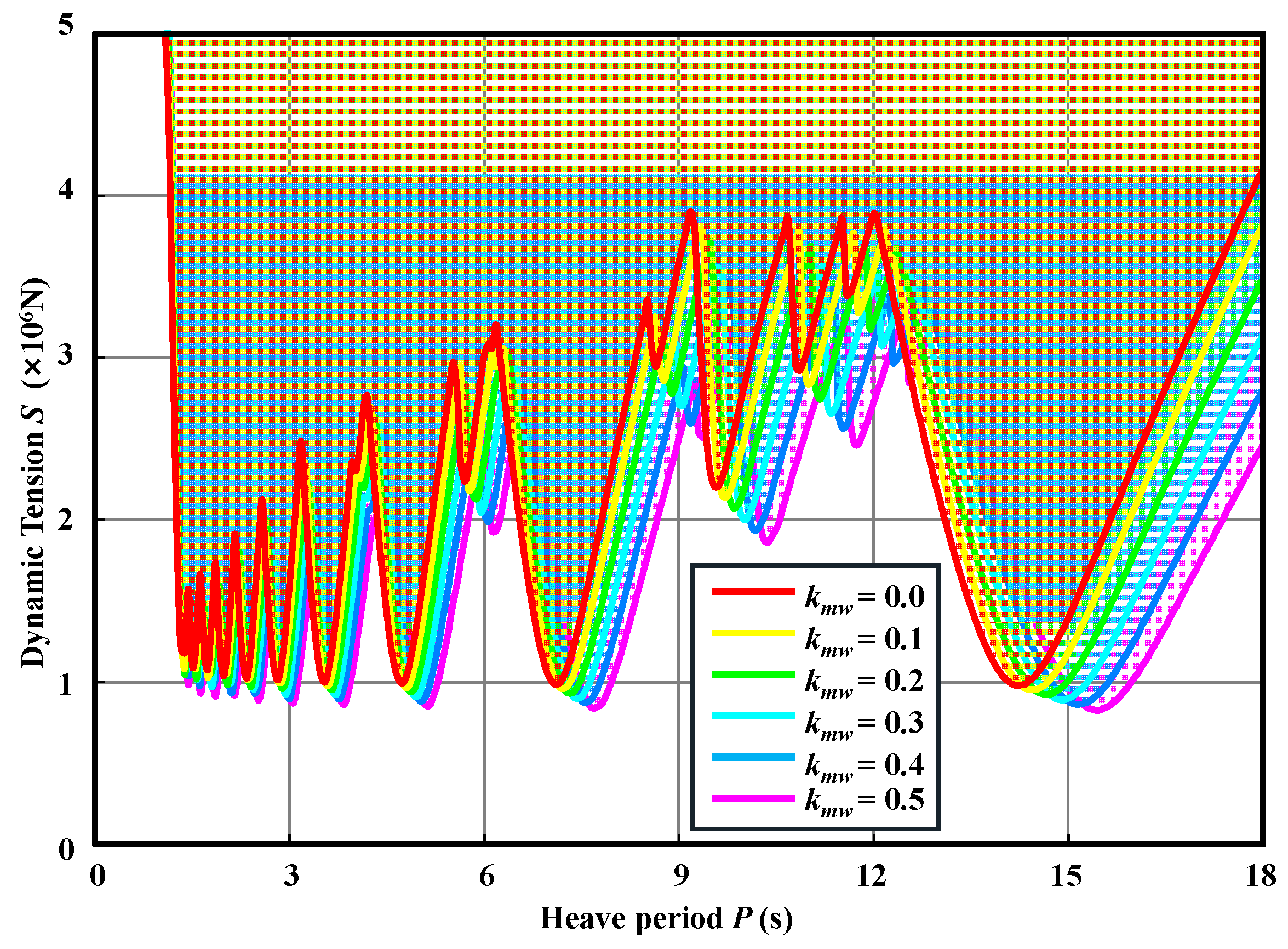
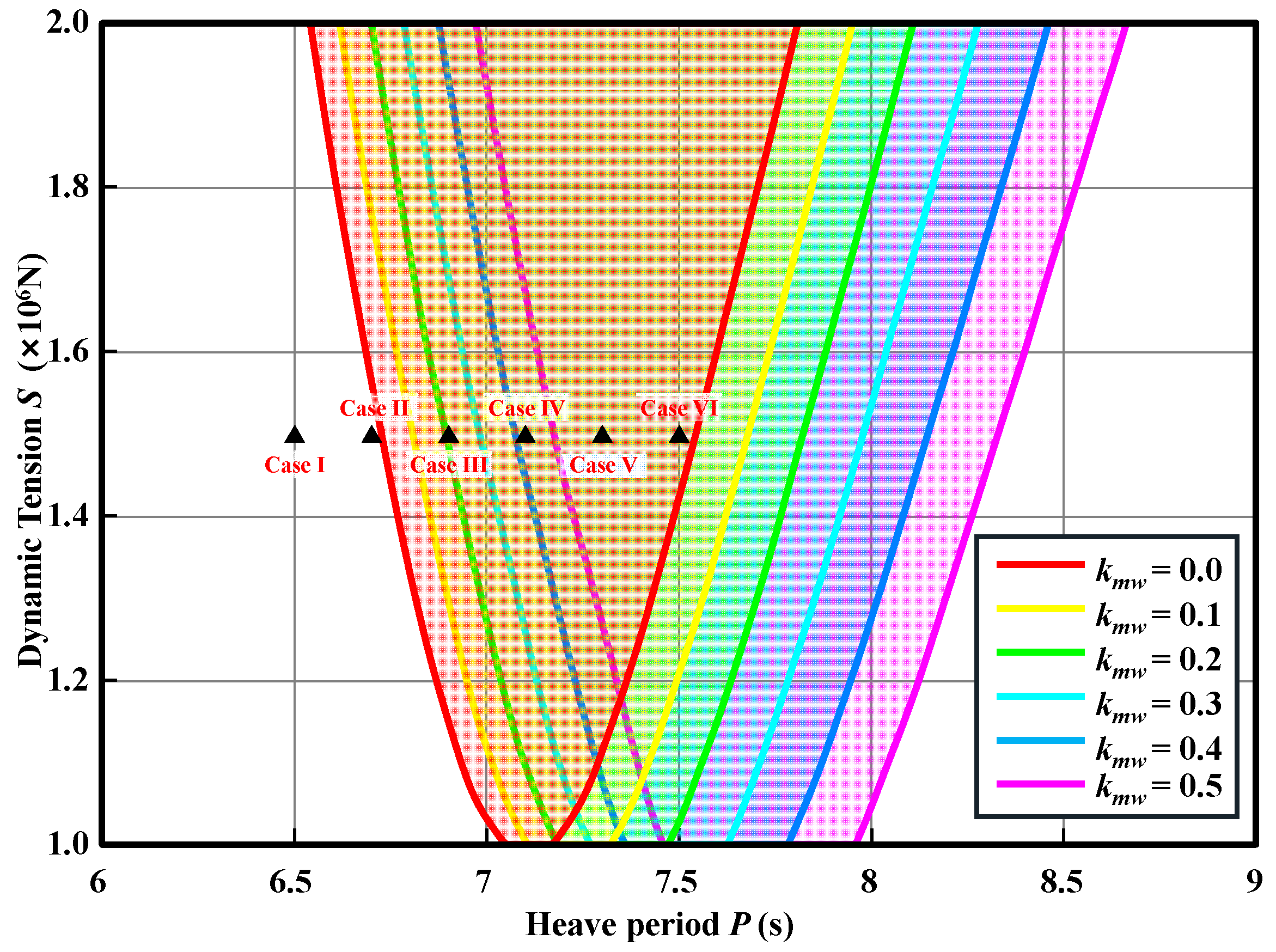
4.4. Instability of Risers with Different Wet-Weight Coefficients
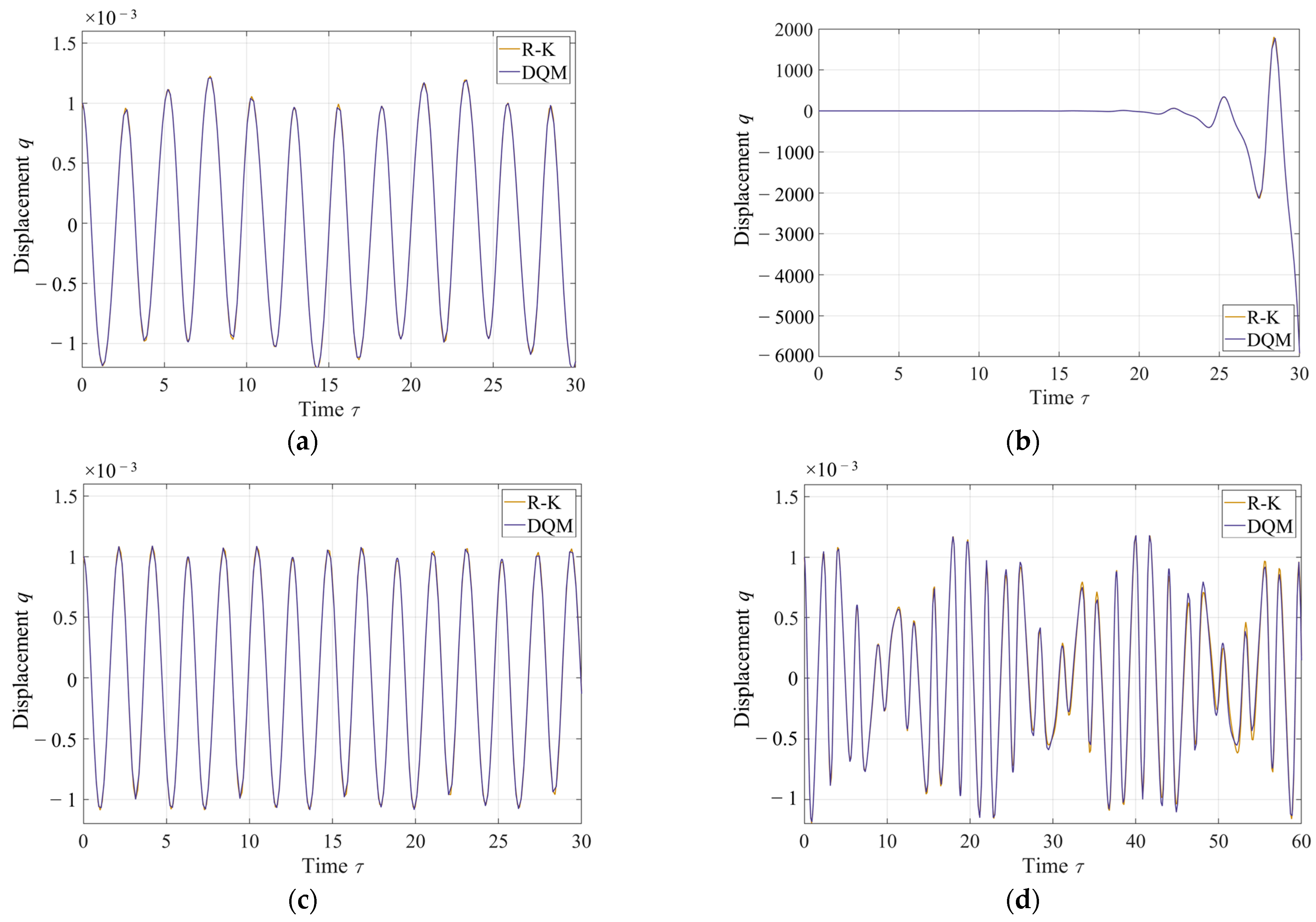
5. Dynamic Responses of Risers’ Parametric Vibration
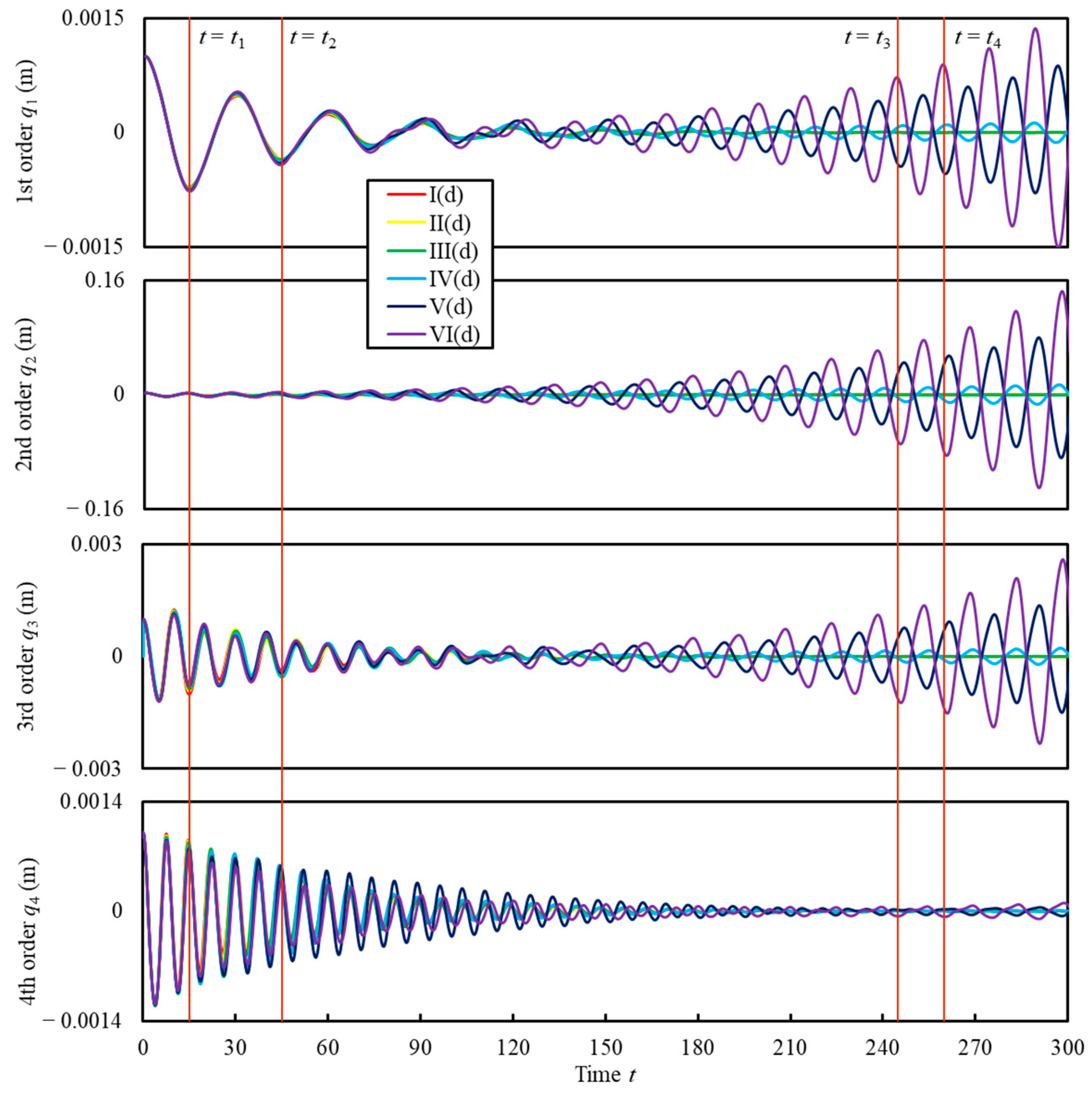
5.1. The Dynamic Response of Different Excitation Periods
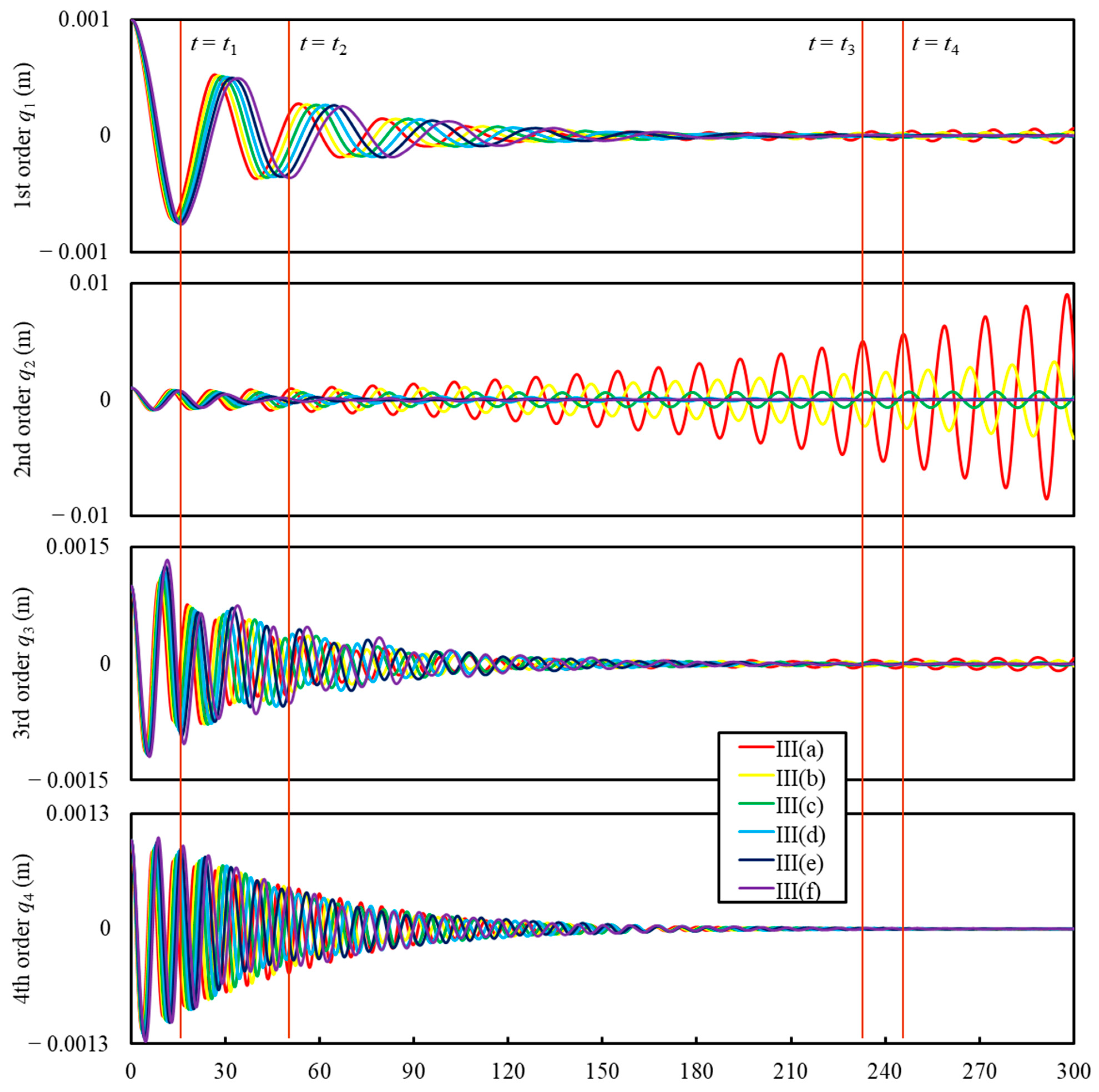
5.2. The Dynamic Response of Different Wet-Weight Coefficients
6. Conclusions
- The instability charts are given by both DQM fitting well and with the borderlines given by the Floquet theory.
- Increasing damping can control the parametric resonance from occurring.
- The increase of internal flow velocity and the wet-weight coefficients will deteriorate the parametric instability of the riser. Additionally, the influences of internal flow velocity on risers’ parametric instability are nonlinear, while the those of wet weight are linear.
- According to the response solutions, the existence of the coupling term will give a chance to the parametrically unstable modes to excite other modes to vibrate unstably.
- The alteration of the parametric excitation period will not change the period of free vibration, while the excitation period will have an effect on the parametrically vibrating period.
- The alteration of the wet-weight coefficients will change the period of free vibration but have little effect on the period of parametric vibration.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, S.S. Forced vibration of a cantilevered tube conveying fluid. J. Acoust. Soc. Am. 1970, 48, 773–775. [Google Scholar] [CrossRef]
- Chen, S.S. Free vibration of a coupled fluid/structural system. J. Sound Vib. 1972, 21, 387–398. [Google Scholar] [CrossRef]
- Chen, S.S. Vibration and stability of a uniformly curved tube conveying fluid. J. Acoust. Soc. Am. 1972, 51, 223–232. [Google Scholar] [CrossRef]
- Chen, S.S. Flow-induced in-plane instabilities of curved pipes. Nucl. Eng. Des. 1972, 23, 29–38. [Google Scholar] [CrossRef]
- Hsu, C.S. The response of a parametrically excited hanging string in fluid. J. Sound Vib. 1975, 39, 305–316. [Google Scholar] [CrossRef]
- HaQuang, N.; Mook, D.T.; Plaut, R.H. Non-linear structural vibrations under combined parametric and external excitations. J. Sound Vib. 1987, 118, 291–306. [Google Scholar] [CrossRef]
- Patel, M.H.; Park, H.I. Combined axial and lateral responses of tensioned buoyant platform tethers. Eng. Struct. 1995, 17, 687–695. [Google Scholar] [CrossRef]
- Park, H.I.; Jung, D.H. A finite element method for dynamic analysis of long slender marine structures under combined parametric and forcing excitations. Ocean Eng. 2002, 29, 1313–1325. [Google Scholar] [CrossRef]
- Chatjigeorgiou, I.K. On the parametric excitation of vertical elastic slender structures and the effect of damping in marine applications. Appl. Ocean Res. 2004, 26, 23–33. [Google Scholar] [CrossRef]
- Chatjigeorgiou, I.K.; Mavrakos, S.A. Nonlinear resonances of parametrically excited risers—Numerical and analytic investigation for Ω = 2ω1. Comput. Struct. 2005, 83, 560–573. [Google Scholar] [CrossRef]
- Yang, H.; Xiao, F.; Xu, P. Parametric instability prediction in a top-tensioned riser in irregular waves. Ocean Eng. 2013, 70, 39–50. [Google Scholar] [CrossRef]
- Franzini, G.R.; Pesce, C.P.; Salles, R.; Gonçalves, R.T.; Fujarra, A.L.; Mendes, P. Experimental analysis of a vertical and flexible cylinder in water: Response to top motion excitation and parametric resonance. J. Vib. Acoust. 2015, 137, 031010. [Google Scholar] [CrossRef]
- Lou, M.; Hu, P.; Qi, X.; Li, H. Stability analysis of deepwater compliant vertical access riser about parametric excitation. Int. J. Nav. Archit. Ocean Eng. 2019, 11, 688–698. [Google Scholar] [CrossRef]
- Zhang, J.; Zeng, Y.; Tang, Y.; Guo, W.; Wang, Z. Numerical and Experimental Research on the Effect of Platform Heave Motion on Vortex-Induced Vibration of Deep Sea Top-Tensioned Riser. Shock Vib. 2021, 2021, 8866051. [Google Scholar] [CrossRef]
- Liang, W.; Lou, M. Parametric Stability Analysis of Marine Risers with Multiphase Internal Flows Considering Hydrate Phase Transitions. J. Ocean Univ. China 2021, 20, 23–34. [Google Scholar] [CrossRef]
- Chai, Y.; Li, W.; Liu, Z. Analysis of transient wave propagation dynamics using the enriched finite element method with interpolation cover functions. Appl. Math. Comput. 2022, 412, 126564. [Google Scholar] [CrossRef]
- Zhang, Y.; Dang, S.; Li, W.; Chai, Y. Performance of the radial point interpolation method (RPIM) with implicit time integration scheme for transient wave propagation dynamics. Comput. Math. Appl. 2022, 114, 95–111. [Google Scholar] [CrossRef]
- Li, W.; Zhang, Q.; Gui, Q.; Chai, Y. A coupled FE-Meshfree triangular element for acoustic radiation problems. Int. J. Comput. Methods 2021, 18, 2041002. [Google Scholar] [CrossRef]
- Li, W.; Gong, Z.; Chai, Y.; Cheng, C.; Li, T.; Wang, M. Hybrid gradient smoothing technique with discrete shear gap method for shell structures. Comput. Math. Appl. 2017, 74, 1826–1855. [Google Scholar]
- Li, Y.; Dang, S.; Li, W.; Chai, Y. Free and forced vibration analysis of two-dimensional linear elastic solids using the finite element methods enriched by interpolation cover functions. Mathematics 2022, 10, 456. [Google Scholar] [CrossRef]
- Lin, W.; Qiao, N. In-plane vibration analyses of curved pipes conveying fluid using the generalized differential quadrature rule. Comput. Struct. 2008, 86, 133–139. [Google Scholar] [CrossRef]
- Qian, Q.; Wang, L.; Ni, Q. Instability of simply supported pipes conveying fluid under thermal loads. Mech. Res. Commun. 2009, 36, 413–417. [Google Scholar] [CrossRef]
- Bellman, R.; Casti, J. Differential quadrature and long-term integration. J. Math. Anal. Appl. 1971, 34, 235–238. [Google Scholar] [CrossRef] [Green Version]
- Sherbourne, A.N.; Pandey, M.D. Differential quadrature method in the buckling analysis of beams and composite plates. Comput. Struct. 1991, 40, 903–913. [Google Scholar] [CrossRef]
- Pandey, M.D.; Sherbourne, A.N. Buckling of anisotropic composite plates under stress gradient. J. Eng. Mech. 1991, 117, 260–275. [Google Scholar] [CrossRef]
- Bert, C.W.; Jang, S.K.; Striz, A.G. Two new approximate methods for analyzing free vibration of structural components. AIAA J. 1988, 26, 612–618. [Google Scholar] [CrossRef]
- Wang, X.; Bert, C.W.; Striz, A.G. Differential quadrature analysis of deflection, buckling, and free vibration of beams and rectangular plates. Comput. Struct. 1993, 48, 473–479. [Google Scholar] [CrossRef]
- Bert, C.W.; Malik, M. Transient analysis of gas-lubricated journal bearing systems by differential quadrature. J. Tribol. 1997, 119, 91–99. [Google Scholar] [CrossRef]
- Wu, T.Y.; Liu, G.R. The generalized differential quadrature rule for fourth-order differential equations. Int. J. Numer. Methods Eng. 2001, 50, 1907–1929. [Google Scholar] [CrossRef]
- Wu, T.Y.; Liu, G.R. Application of the generalized differential quadrature rule to eighth-order differential equations. Commun. Numer. Methods Eng. 2001, 17, 355–364. [Google Scholar] [CrossRef]
- El-Zahar, E.R.; Rashad, A.M.; Seddek, L.F. The impact of sinusoidal surface temperature on the natural convective flow of a ferrofluid along a vertical plate. Mathematics 2019, 7, 1014. [Google Scholar] [CrossRef] [Green Version]
- Bota, C.; Căruntu, B.; Ţucu, D.; Lăpădat, M.; Paşca, M.S. A Least Squares Differential Quadrature Method for a Class of Nonlinear Partial Differential Equations of Fractional Order. Mathematics 2020, 8, 1336. [Google Scholar] [CrossRef]
- Shojaei, M.F.; Ansari, R. Variational differential quadrature: A technique to simplify numerical analysis of structures. Appl. Math. Model. 2017, 49, 705–738. [Google Scholar] [CrossRef]
- Ojo, S.O.; Trinh, L.C.; Khalid, H.M.; Weaver, P.M. Inverse differential quadrature method: Mathematical formulation and error analysis. Proc. R. Soc. A-Math. Phys. Eng. Sci. 2021, 477, 20200815. [Google Scholar] [CrossRef] [PubMed]
- Sharma, P. Efficacy of Harmonic Differential Quadrature method to vibration analysis of FGPM beam. Compos. Struct. 2018, 189, 107–116. [Google Scholar] [CrossRef]
- Ghalandari, M.; Shamshirband, S.; Mosavi, A.; Chau, K.W. Flutter speed estimation using presented differential quadrature method formulation. Eng. Appl. Comp. Fluid 2019, 13, 804–810. [Google Scholar] [CrossRef] [Green Version]
- Zong, Z.; Zhang, Y. Advanced Differential Quadrature Methods; Chapman & Hall/CRC: Boca Raton, FL, USA; London, UK; New York, NY, USA, 2009. [Google Scholar]
- Shu, C. Differential Quadrature and Its Application in Engineering; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Arscott, F.M. Periodic Differential Equations: An Introduction to Mathieu, Lamé, and Allied Functions; Elsevier: Amsterdam, The Netherlands, 2014; Volume 66. [Google Scholar]
- Bert, C.W.; Malik, M. Differential quadrature method in computational mechanics: A review. Appl. Mech. Rev. 1996, 49, 1–28. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Example 1 | Example 2 | Example 3 | Example 4 | |
|---|---|---|---|---|
| α | 6 | 6 | 9 | 9 |
| β | 2.2 | 8.8 | 2.2 | 8.8 |
| Items | Symbols | Values |
|---|---|---|
| Young’s modulus | E | 210 GPa |
| Sea water density | ρw | 1025 kg/m3 |
| Pipe wall density | ρs | 7850 kg/m3 |
| Internal fluid density | ρf | 800 kg/m3 |
| Pipe’s outer diameter | D | 0.66 m |
| Pipe’s Length | h | 0.026 m |
| Static Tension of the riser | T0 | 5 × 107 N |
| Parameter | Case I(d) | Case II(d) | Case III(d) | Case IV(d) | Case V(d) | Case VI(d) |
|---|---|---|---|---|---|---|
| ζ | 0.1 | |||||
| U | 2 m/s | |||||
| kmw | 0.3 | |||||
| S | 1.5 × 106 N | |||||
| P | 6.5 s | 6.7 s | 6.9 s | 7.1 s | 7.3 s | 7.5 s |
| Parameter | Case III(a) | Case III(b) | Case III(c) | Case III(d) | Case III(e) | Case III(f) |
|---|---|---|---|---|---|---|
| ζ | 0.1 | |||||
| U | 2 m/s | |||||
| kmw | 0.0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 |
| S | 1.5 × 106 N | |||||
| P | 6.9 s | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Gui, Q.; Yang, Y.; Li, W. The Instability and Response Studies of a Top-Tensioned Riser under Parametric Excitations Using the Differential Quadrature Method. Mathematics 2022, 10, 1331. https://doi.org/10.3390/math10081331
Zhang Y, Gui Q, Yang Y, Li W. The Instability and Response Studies of a Top-Tensioned Riser under Parametric Excitations Using the Differential Quadrature Method. Mathematics. 2022; 10(8):1331. https://doi.org/10.3390/math10081331
Chicago/Turabian StyleZhang, Yang, Qiang Gui, Yuzheng Yang, and Wei Li. 2022. "The Instability and Response Studies of a Top-Tensioned Riser under Parametric Excitations Using the Differential Quadrature Method" Mathematics 10, no. 8: 1331. https://doi.org/10.3390/math10081331
APA StyleZhang, Y., Gui, Q., Yang, Y., & Li, W. (2022). The Instability and Response Studies of a Top-Tensioned Riser under Parametric Excitations Using the Differential Quadrature Method. Mathematics, 10(8), 1331. https://doi.org/10.3390/math10081331