


A Robust Sphere Detection in a Realsense Point Cloud by USING Z-Score and RANSAC
 , , , , and
, , , , and 
Abstract
:1. Introduction
- Three-dimensional data are used directly by our method.
- Sphere size is used as a pattern to be searched.
- The proposed method allows to find the sphere in complex scenes with multiple objects and textures.
- No additional conversions are needed to detect the sphere.
- It is robust to outliers.
2. Materials and Methods
2.1. Computer Equipment, Programming Language
2.2. RGB-D Camera
2.3. Model to Represent the Sphere with a Known Size
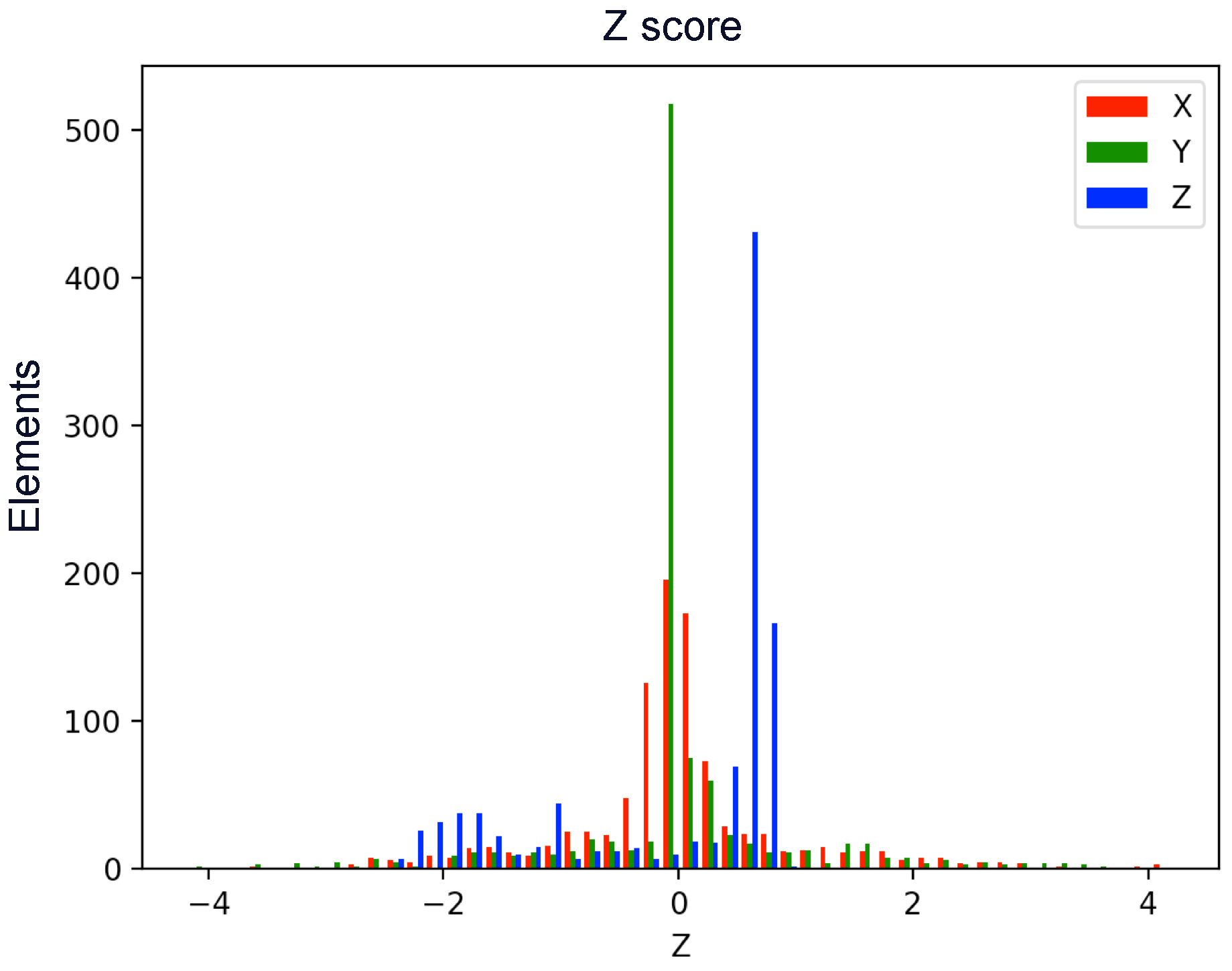
2.4. Z-Score
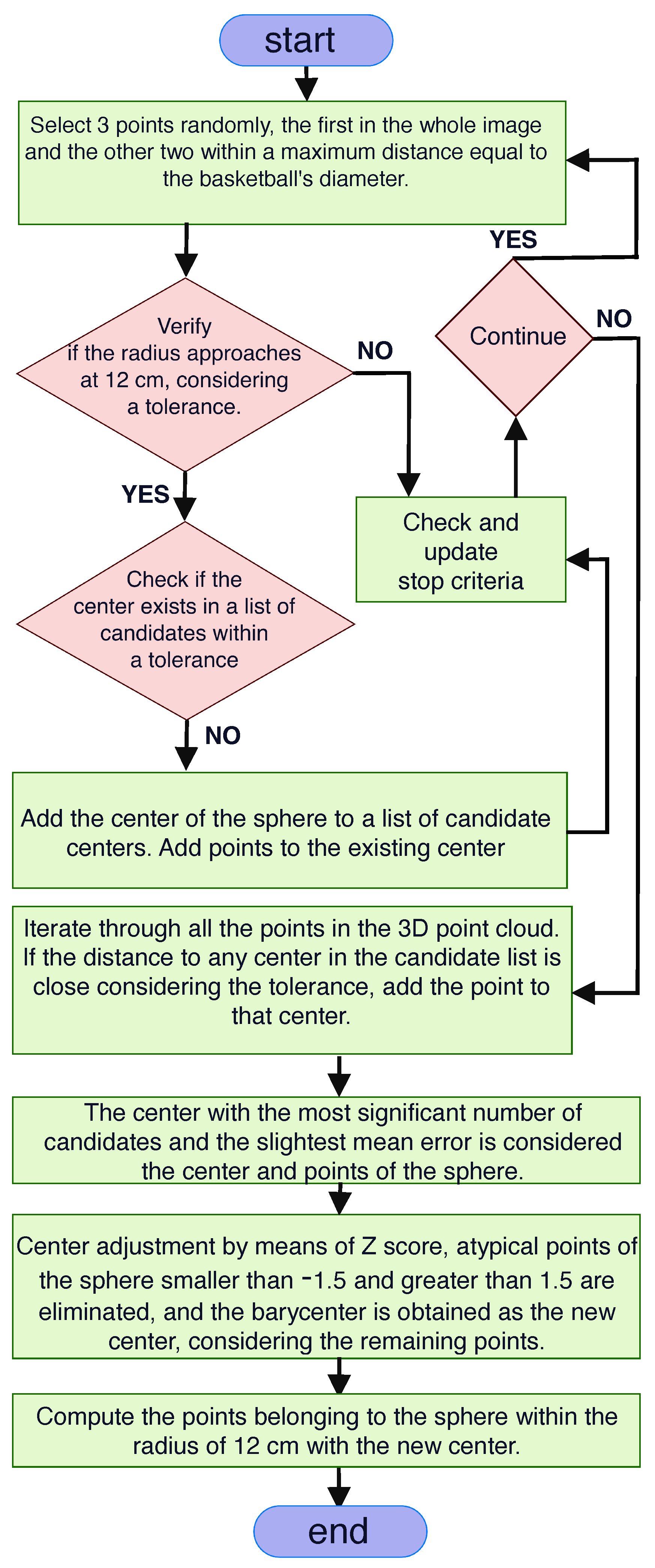
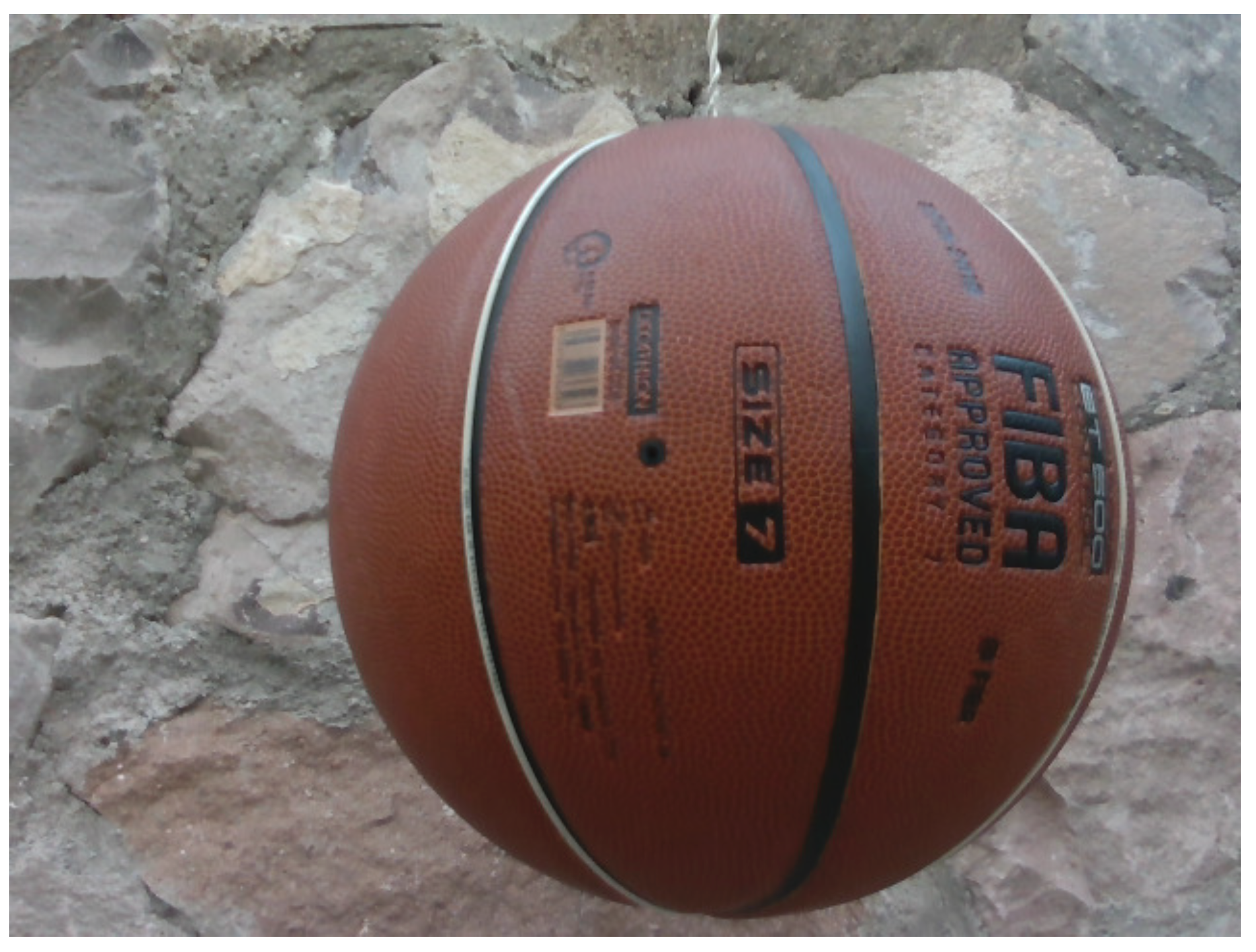
2.5. Basketball and RANSAC Method
3. Experiments and Results
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhong, J.; Li, M.; Liao, X.; Qin, J. A Real-Time Infrared Stereo Matching Algorithm for RGB-D Cameras’ Indoor 3D Perception. ISPRS Int. J. Geo-Inf. 2020, 9, 472. [Google Scholar] [CrossRef]
- Na, M.H.; Cho, W.H.; Kim, S.K.; Na, I.S. Automatic Weight Prediction System for Korean Cattle Using Bayesian Ridge Algorithm on RGB-D Image. Electronics 2022, 11, 1663. [Google Scholar] [CrossRef]
- Slavcheva, M.; Baust, M.; Cremers, D.; Ilic, S. Killingfusion: Non-Rigid 3d reconstruction without correspondences. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1386–1395. [Google Scholar]
- Tychola, K.A.; Tsimperidis, I.; Papakostas, G.A. On 3D Reconstruction Using RGB-D Cameras. Digital 2022, 2, 401–421. [Google Scholar] [CrossRef]
- LeCompte, M.C.; Chung, S.A.; McKee, M.M.; Marshall, T.G.; Frizzell, B.; Parker, M.; Blackstock, A.W.; Farris, M.K. Simple and rapid creation of customized 3-dimensional printed bolus using iPhone X true depth camera. Pract. Radiat. Oncol. 2019, 9, e417–e421. [Google Scholar] [CrossRef] [PubMed]
- Dou, M.; Khamis, S.; Degtyarev, Y.; Davidson, P.; Fanello, S.R.; Kowdle, A.; Escolano, S.O.; Rhemann, C.; Kim, D.; Taylor, J.; et al. Fusion4d: Real-time performance capture of challenging scenes. ACM Trans. Graph. (ToG) 2016, 35, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Gao, W.; Wu, Y.; Liu, Y.; Shen, Y. High-quality indoor scene 3D reconstruction with RGB-D cameras: A brief review. Comput. Vis. Media 2022, 8, 369–393. [Google Scholar] [CrossRef]
- Wasenmüller, O.; Meyer, M.; Stricker, D. CoRBS: Comprehensive RGB-D benchmark for SLAM using Kinect v2. In Proceedings of the 2016 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Placid, NY, USA, 7–10 March 2016; pp. 1–7. [Google Scholar]
- Rakotosaona, M.J.; La Barbera, V.; Guerrero, P.; Mitra, N.J.; Ovsjanikov, M. Pointcleannet: Learning to denoise and remove outliers from dense point clouds. In Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2020; Volume 39, pp. 185–203. [Google Scholar]
- Song, Y.; Xu, F.; Yao, Q.; Liu, J.; Yang, S. Navigation algorithm based on semantic segmentation in wheat fields using an RGB-D camera. Inf. Process. Agric. 2022. [Google Scholar] [CrossRef]
- Tan, F.; Xia, Z.; Ma, Y.; Feng, X. 3D Sensor Based Pedestrian Detection by Integrating Improved HHA Encoding and Two-Branch Feature Fusion. Remote Sens. 2022, 14, 645. [Google Scholar] [CrossRef]
- Klingensmith, M.; Dryanovski, I.; Srinivasa, S.S.; Xiao, J. Chisel: Real Time Large Scale 3D Reconstruction Onboard a Mobile Device using Spatially Hashed Signed Distance Fields. In Proceedings of the Robotics: Science and Systems, Rome, Italy, 13–17 July 2015; Citeseer: Princeton, NJ, USA, 2015; Volume 4. [Google Scholar]
- Sui, W.; Wang, L.; Fan, B.; Xiao, H.; Wu, H.; Pan, C. Layer-wise floorplan extraction for automatic urban building reconstruction. IEEE Trans. Vis. Comput. Graph. 2015, 22, 1261–1277. [Google Scholar] [CrossRef]
- Herban, S.; Costantino, D.; Alfio, V.S.; Pepe, M. Use of low-cost spherical cameras for the digitisation of cultural heritage structures into 3d point clouds. J. Imaging 2022, 8, 13. [Google Scholar] [CrossRef]
- Delasse, C.; Lafkiri, H.; Hajji, R.; Rached, I.; Landes, T. Indoor 3D Reconstruction of Buildings via Azure Kinect RGB-D Camera. Sensors 2022, 22, 9222. [Google Scholar] [CrossRef]
- Zheng, H.; Wang, W.; Wen, F.; Liu, P. A Complementary Fusion Strategy for RGB-D Face Recognition. In Proceedings of the MultiMedia Modeling: 28th International Conference, MMM 2022, Phu Quoc, Vietnam, 6–10 June 2022; Part I. pp. 339–351. [Google Scholar]
- Trujillo Jiménez, M.A.; Navarro, P.; Pazos, B.; Morales, L.; Ramallo, V.; Paschetta, C.; De Azevedo, S.; Ruderman, A.; Pérez, O.; Delrieux, C.; et al. Body2vec: 3D point cloud reconstruction for precise anthropometry with handheld devices. J. Imaging 2020, 6, 94. [Google Scholar] [CrossRef]
- Morell Gimenez, V.; Saval-Calvo, M.; Azorin-Lopez, J.; Garcia-Rodriguez, J.; Cazorla, M.; Orts-Escolano, S.; Fuster-Guillo, A. A comparative study of registration methods for RGB-D video of static scenes. Sensors 2014, 14, 8547–8576. [Google Scholar] [CrossRef]
- Tagarakis, A.C.; Kalaitzidis, D.; Filippou, E.; Benos, L.; Bochtis, D. 3d scenery construction of agricultural environments for robotics awareness. In Information and Communication Technologies for Agriculture—Theme III: Decision; Springer: Berlin/Heidelberg, Germany, 2022; pp. 125–142. [Google Scholar]
- Suzuki, R.; Karim, A.; Xia, T.; Hedayati, H.; Marquardt, N. Augmented reality and robotics: A survey and taxonomy for ar-enhanced human-robot interaction and robotic interfaces. In Proceedings of the 2022 CHI Conference on Human Factors in Computing Systems, New Orleans, LA, USA, 29 April–5 May 2022; pp. 1–33. [Google Scholar]
- Tanzer, M.; Laverdière, C.; Barimani, B.; Hart, A. Augmented reality in arthroplasty: An overview of clinical applications, benefits, and limitations. J. Am. Acad. Orthop. Surg. 2022, 30, e760–e768. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, C.; Zhang, W.; Fang, C.; Xia, Y.; Liu, Y.; Dong, H. Object-Based Reliable Visual Navigation for Mobile Robot. Sensors 2022, 22, 2387. [Google Scholar] [CrossRef]
- Ortiz, F.M.; Sammarco, M.; Costa, L.H.M.; Detyniecki, M. Applications and Services Using Vehicular Exteroceptive Sensors: A Survey. IEEE Trans. Intell. Veh. 2022, 8, 949–969. [Google Scholar] [CrossRef]
- Antonopoulos, A.; Lagoudakis, M.G.; Partsinevelos, P. A ROS Multi-Tier UAV Localization Module Based on GNSS, Inertial and Visual-Depth Data. Drones 2022, 6, 135. [Google Scholar] [CrossRef]
- Yan, Y.; Mao, Y.; Li, B. Second: Sparsely embedded convolutional detection. Sensors 2018, 18, 3337. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- de Gusmão Lafayette, T.B.; de Lima Kunst, V.H.; de Sousa Melo, P.V.; de Oliveira Guedes, P.; Teixeira, J.M.X.N.; de Vasconcelos, C.R.; Teichrieb, V.; da Gama, A.E.F. Validation of Angle Estimation Based on Body Tracking Data from RGB-D and RGB Cameras for Biomechanical Assessment. Sensors 2022, 23, 3. [Google Scholar] [CrossRef] [PubMed]
- de Medeiros Esper, I.; Smolkin, O.; Manko, M.; Popov, A.; From, P.J.; Mason, A. Evaluation of RGB-D Multi-Camera Pose Estimation for 3D Reconstruction. Appl. Sci. 2022, 12, 4134. [Google Scholar] [CrossRef]
- Firman, M. RGBD datasets: Past, present and future. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 19–31. [Google Scholar]
- Zhang, C.; Zhang, Z. Calibration between depth and color sensors for commodity depth cameras. In Computer Vision and Machine Learning with RGB-D Sensors; Springer: Berlin/Heidelberg, Germany, 2014; pp. 47–64. [Google Scholar]
- Yang, J.; Li, H.; Campbell, D.; Jia, Y. Go-ICP: A globally optimal solution to 3D ICP point-set registration. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 38, 2241–2254. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, H.; Qu, D.; Xu, F.; Zou, F.; Song, J.; Jia, K. Approach for accurate calibration of RGB-D cameras using spheres. Opt. Express 2020, 28, 19058–19073. [Google Scholar] [CrossRef] [PubMed]
- Staranowicz, A.; Brown, G.R.; Morbidi, F.; Mariottini, G.L. Easy-to-use and accurate calibration of rgb-d cameras from spheres. In Proceedings of the Pacific-Rim Symposium on Image and Video Technology, Guanajuato, Mexico, 28 October–1 November 2013; pp. 265–278. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for point-cloud shape detection. Proc. Comput. Graph. Forum 2007, 26, 214–226. [Google Scholar] [CrossRef]
- Ge, Z.; Shen, X.; Gao, Q.; Sun, H.; Tang, X.; Cai, Q. A Fast Point Cloud Recognition Algorithm Based on Keypoint Pair Feature. Sensors 2022, 22, 6289. [Google Scholar] [CrossRef]
- Song, W.; Li, D.; Sun, S.; Zhang, L.; Xin, Y.; Sung, Y.; Choi, R. 2D 3DHNet for 3D Object Classification in LiDAR Point Cloud. Remote Sens. 2022, 14, 3146. [Google Scholar] [CrossRef]
- Ercan, M.F.; Qiankun, A.L.; Sakai, S.S.; Miyazaki, T. Circle detection in images: A deep learning approach. In Proceedings of the Global Oceans 2020: Singapore—U.S. Gulf Coast, Virtual, 5–14 October 2020. [Google Scholar] [CrossRef]
- Nguyen, E.H.; Yang, H.; Deng, R.; Lu, Y.; Zhu, Z.; Roland, J.T.; Lu, L.; Landman, B.A.; Fogo, A.B.; Huo, Y. Circle Representation for Medical Object Detection. IEEE Trans. Med. Imaging 2022, 41, 746–754. [Google Scholar] [CrossRef]
- Keselman, L.; Iselin Woodfill, J.; Grunnet-Jepsen, A.; Bhowmik, A. Intel realsense stereoscopic depth cameras. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017; pp. 1–10. [Google Scholar]
- Salgado, C.M.; Azevedo, C.; Proença, H.; Vieira, S.M. Noise versus outliers. In Secondary Analysis of Electronic Health Records; Springs: Berlin/Heidelberg, Germany, 2016; pp. 163–183. [Google Scholar]
- Yang, H.; Deng, R.; Lu, Y.; Zhu, Z.; Chen, Y.; Roland, J.T.; Lu, L.; Landman, B.A.; Fogo, A.B.; Huo, Y. CircleNet: Anchor-Free Glomerulus Detection with Circle Representation. In Medical Image Computing and Computer Assisted Intervention—MICCAI 2020; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 35–44. [Google Scholar] [CrossRef]
- Everingham, M.; Gool, L.V.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2009, 88, 303–338. [Google Scholar] [CrossRef] [Green Version]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Description |
|---|---|
| Operating range | ∼0.11–10 m |
| Connection Interface | USB Type C |
| Dimensions | 90 mm × 25 mm × 25 mm |
| Depth resolution | 1280 × 720 |
| Scene and Z Threshold | RMSE RANSAC | RMSE RANSAC Center Adjusted Points | RMSE Barycenter Adjusted Points |
|---|---|---|---|
| E1 z 3 | 0.007343368 | 0.007343368 | 0.032156230 |
| E1 z 2 | 0.007343368 | 0.007343368 | 0.020370757 |
| E1 z 1.5 | 0.007343368 | 0.007343368 | 0.004612417 |
| E2 z 1.5 | 0.366534813 | 0.357131966 | 0.041731429 |
| E3 z 1.5 | 0.033177435 | 0.033539393 | 0.027763554 |
| Method | mAP | mAP.50cIOU | mAP.75cIOU |
|---|---|---|---|
| CircleNet-HG | 0.491 | 0.843 | 0.512 |
| SphereDetection (ours) | 0.512 | 0.894 | 0.529 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roman-Rivera, L.-R.; Pedraza-Ortega, J.C.; Aceves-Fernandez, M.A.; Ramos-Arreguín, J.M.; Gorrostieta-Hurtado, E.; Tovar-Arriaga, S. A Robust Sphere Detection in a Realsense Point Cloud by USING Z-Score and RANSAC. Mathematics 2023, 11, 1023. https://doi.org/10.3390/math11041023
Roman-Rivera L-R, Pedraza-Ortega JC, Aceves-Fernandez MA, Ramos-Arreguín JM, Gorrostieta-Hurtado E, Tovar-Arriaga S. A Robust Sphere Detection in a Realsense Point Cloud by USING Z-Score and RANSAC. Mathematics. 2023; 11(4):1023. https://doi.org/10.3390/math11041023
Chicago/Turabian StyleRoman-Rivera, Luis-Rogelio, Jesus Carlos Pedraza-Ortega, Marco Antonio Aceves-Fernandez, Juan Manuel Ramos-Arreguín, Efrén Gorrostieta-Hurtado, and Saúl Tovar-Arriaga. 2023. "A Robust Sphere Detection in a Realsense Point Cloud by USING Z-Score and RANSAC" Mathematics 11, no. 4: 1023. https://doi.org/10.3390/math11041023
APA StyleRoman-Rivera, L. -R., Pedraza-Ortega, J. C., Aceves-Fernandez, M. A., Ramos-Arreguín, J. M., Gorrostieta-Hurtado, E., & Tovar-Arriaga, S. (2023). A Robust Sphere Detection in a Realsense Point Cloud by USING Z-Score and RANSAC. Mathematics, 11(4), 1023. https://doi.org/10.3390/math11041023