1. Introduction
The process of continuous spectrum sensing by a cognitive radio results in high energy consumption and low data transmission, particularly in densely occupied environments. Energy harvesting in cognitive radio networks (CRNs) has emerged as a promising technology where the energy consumption by the CR is taken care of [
1]. Energy harvesters are equipped with the powerful capability of capturing and storing the energy from ambient energy as well as other forms of energy. Such wireless networks need continuous performance enhancement. As these networks use harvesters, the performance measure of such networks is calculated in terms of throughput, sensing duration, transmission time, and energy efficiency (EE) [
2]. The duration of sensing and transmission affect the throughput and energy efficiency of the system. Higher throughput can be obtained by providing more time for transmission, but at the cost of energy. Thus, spectrum sensing and energy harvesting in CRNs are performed simultaneously to enhance network performance. The demand for energy efficiency with higher throughput cognitive radio networks is achieved by utilizing various optimization algorithms; therefore, we focus on achieving higher throughput and energy efficiency for the combined spectrum of sensing and energy harvesting in CRNs [
3]. The multiple objectives of the energy-harvesting cognitive radio network (EHCRN), if optimized simultaneously, expedite the performance of the network, making it more efficient. In such circumstances, choosing the optimization method is incredibly important so that network performance is not degraded.
Most of the optimization problems are non-convex in nature, and it becomes difficult to find a global optimal solution as they have more than one solution. Optimization problems that have a large search space or are more complex in nature will be difficult to solve using conventional mathematical optimization algorithms. The different metaheuristic optimization algorithms present in the research arena are very capable of solving difficult optimization problems. Each of the metaheuristic optimization algorithms has its own strengths and potential for improvement. Some of them might converge faster, and others may take a longer time to find the optimal solution. Nevertheless, there is a lot of scope for further improvement in metaheuristic optimization algorithms. Here, a combination of metaheuristic optimization [
4], a Shapley value, and a game theoretic approach [
5] is considered. Until now, hybridization of metaheuristic techniques such as PSOGWO [
6] and game theory has not been reported in the field of energy harvesting and spectrum sensing. Thus, in this work, we propose a novel Shapley-value-based hybrid metaheuristic multi-objective optimization technique for EHCRN. The main contributions of this work are listed as follows:
Mathematical formulation of the multi-objective optimization problem for combined spectrum sensing energy harvesting (CSSEH).
A novel concept of unbiased search agents in the particle swarm optimization grey wolf optimization algorithm.
The development of an extended hybrid algorithm that combines game theory and a metaheuristic optimization algorithm shows faster convergence with a better Pareto front.
Optimum sensing duration for maximum average throughput and energy efficiency by the Shapley adaptive weights.
To summarize, this paper focuses on the application of Shapley hybrid metaheuristics to a combined spectrum sensing and energy-harvesting network, where spectrum sensing by the cognitive radio is performed and this sensing energy is kept at a minimum to save the harvested energy from the CR. Performance is improved for the EHCRN by our proposed technique, which is demonstrated by the simulation results.
The rest of this paper is organized as follows:
Section 2 presents the literature review. The multi-objective problem formulation with detailed insight into CSSEH is described in
Section 3. In
Section 4, the optimization techniques, including the design of the proposed Shapley value-based PSOGWO, are discussed. In
Section 5, the implementation of the techniques, the simulation results, and a comparative performance analysis are presented. Finally,
Section 6 sums up the conclusion as well as the future direction of the research.
3. Multi-Objective Problem Formulation for Combined Spectrum Sensing and Energy Harvesting (CSSEH)
In this section, an energy-harvesting cognitive radio network for multi-objective problem formulation is considered. The first part comprises a mathematical model for energy harvesting and the second part consists of obtaining the multiple fitness functions for optimization.
Figure 1 comprises a primary transmitter (PT), an energy harvester (EH), and a spectrum sensing unit at the secondary transmitter (ST). The power from the RF signal of the PT transfers to the energy harvester for charging first. Then, the ST performs spectrum sensing and transmits the data to the secondary user (SU) using the harvested power.
The received signal at the energy harvester is given as follows:
where
k = 1, 2, …,
K denotes the
K time slots used for energy harvesting (EH) by the secondary transmitter (ST),
hk is the fading coefficient of the channel between the primary transmitter and the secondary transmitter,
is the transmission power of the primary transmitter,
is the transmitted signal with unit power
E{
2} = 1, and
is the complex additive white Gaussian noise with mean zero and variance 2
β2 denoted by CN (0, 2
β2). The channel coefficient is a complex Gaussian random variable with mean s = 0 and variance 2
α2 = 1. Hence, the Rayleigh fading channel is assumed in this work. Here, the average signal-to-noise ratio is
where
Pf is the average fading power given by
2.
As the harvested energy is collected in the harvester, the total harvested energy over
K time slots is given by (2):
where
is the conversion efficiency of the energy harvester in the Kth time slot. Since a single harvester is used,
=
η for
k = 1, 2, …,
K. Each power transmission is completed in
τ seconds.
Now, the RF signal at the energy harvester is converted to a low pass signal and given as follows:
where
is the noise due to the rectifier unit with mean 0 and variance γ
2. Some part
of the converted signal is used to charge the battery, and the remaining
is used for spectrum sensing given as follows:
The performance of spectrum sensing is determined by the signal-to-noise ratio of the
iss and is not affected by
as long as it is less than unity. Thus, the detection threshold should be decreased with the increasing
The signal
is sampled at the nth coherence time with the set detection threshold
with the total sample size of
N to find the state of the primary user. The spectrum state is determined as follows:
For accurate spectrum sensing by the ST, the main performance parameters are the probability of false alarm and misdetection. The sensing duration and detection threshold are the parameters that simultaneously affect the probability of detection
Pd(
τs, ε) and
Pf (
τs, ε) given by:
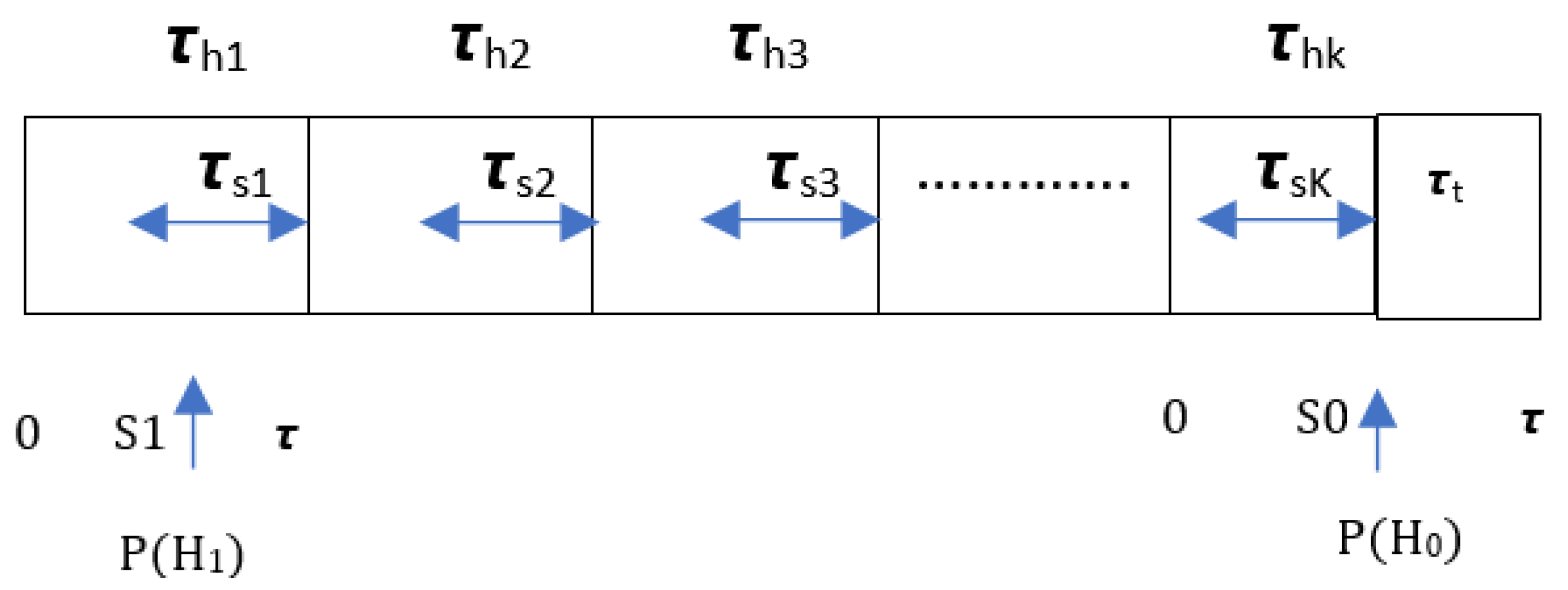
The average throughput at the ST is maximized only if these parameters are maintained up to a certain level in keeping with the view of the QOS of the primary user. We consider the integrated scenario of combined spectrum sensing and energy harvesting (CSSEH) which increases the harvested energy and reduces the energy consumption for spectrum sensing, thus making more energy available for data transmission which finally increases the throughput. The frame structure of the CSSEH scenario can be explained by considering the two states, S1 and S0, which the secondary transmitter can acquire (
Figure 2).
For the given frame structure, we considered that the secondary transmitter harvests the energy by detecting the primary transmitter in (K − 1) consecutive timeslots. The slots can be explained by the state of the channel being busy or idle. The availability of the channel puts the ST in two states. All the (K − 1) slots (0 to τ) of state S1 are of equal length and consist of the same harvesting time (i.e., τh1 = τh2 = τh3 = …… = τhk−1) and the sensing time (i.e., τs1 = τs2 = τs3 = …… = τsk−1 = τs).
The secondary transmitter is in state
S1 when the channel is busy (i.e., the primary transmitter is present), with the probability of a busy channel as π1. During this time slot (0–
τ), the harvester can harvest the RF energy for the entire slot (i.e.,
τh1 =
τh2 =
τh =
τ), where
τh is the harvesting time. The
τh duration is assumed to be the same for all the slots and long enough so that the harvested energy is larger than the energy consumed for spectrum sensing. During the (
τh–
τs) time slot of the energy-harvesting period, only energy harvesting is performed, while for the remaining
τs period, spectrum sensing and energy harvesting are executed simultaneously. The ST is not transmitting during this state and the probability of state S
1 is given by:
The parameters, π1 = Pr(S1|PT present) and π0 = Pr(S0|PT absent), denote the stationary probabilities that the channel is busy and idle, respectively, and are given by:
The ST in State S0 involves harvesting, sensing, and transmitting time structure in the Kth time slot. When the channel is idle, i.e., the primary transmitter is absent, the probability of an idle channel is π0. S0 is further divided into S00 and S01 (i.e., when the channel is idle and busy, respectively).
State S00 consists of harvesting and sensing. In this state, the harvesting time is reduced to τ − τt= τhk. When the primary transmitter is not present, the secondary transmitter transmits data to the secondary receiver with the harvested energy over the period τt. The probability of ST being in state S00 is given by:
State S01 is the state when the channel is busy, that is, neither sensing nor harvesting takes place, and only data are transmitted for the remaining time, i.e., τt.
The probability of ST being in state
S01 is given by:
The net stored energy after staying in state S1 (K times) before going into state S0 at the end of the (K − 1)th time slot is given as follows:
The net stored energy
in state S
00 after staying in state S
1 (K − 1 times), is given as follows:
where
,
The will be further used by the ST for data transmission in state S01.
For the discussed scenario of combined sensing and harvesting, the multiple optimization objectives are formulated by taking the throughput of the individual states and then taking their average.
where
and
are the throughput for the
S00 and
S01 states considered, respectively.
Thus, the average throughput can be expressed as the sum of throughput of ST formulated as the fitness function as follows:
where
,
is the power for transmitting the data,
is the noise power at the secondary receiver, and
. Where
and
are the channel gain between ST and SU and PT and SU, respectively.
As data transmission takes place with the harvested energy, the harvested energy at the secondary transmitter needs to be maximized so that more power is available for transmission, which finally increases the throughput. The energy efficiency of the EHCRN, given as the ratio of the average throughput to the average energy consumption, is used to measure the network’s performance subject to the detection constraints in (8). The total energy consumption includes the energy consumed for spectrum sensing represented as
τs1 Es1. Thus, using (18), energy efficiency is given below:
Based on Equations (18) and (19), the optimization problem can be formulated as a maximization problem. F(x): {maxF1(x), F2(x)}, subject to the constraints on energy and the interference.
The multi-objective optimization problem can be solved using hybrid metaheuristic techniques. PSO and GWO are metaheuristic optimization techniques used in many optimization problems; they target finding the best solution to a problem. PSO is inspired by swarms, whereas GWO is a metaheuristic optimization technique that is inspired by grey wolves. Particle swarm optimization is known for its exploitation capability, while grey wolf optimization is known for its exploration ability.
PSOGWO is a nature-inspired technique that integrates the qualities of individual PSO and GWO algorithms to determine the best position of the wolves. Hybrid PSOGWO shows faster convergence for standard optimization problems as compared to PSO and GWO. In PSOGWO, both algorithms run in parallel by using the governing equations in the best possible manner.
In particle swarm optimization, the initial population
pop N is generated randomly and, in each iteration, ‘
iter’, the position
and velocity
of particle
i in iteration step
n in the swarm are updated in memory using the following equations:
Here, is the inertia weight parameter and and are random values between 0 and 1 with and as the acceleration coefficients with a positive value. gives the best position obtained by the i-th particle and gives the best position achieved globally in the swarm.
To increase the chance of achieving a global solution and not becoming trapped in local minima, the GWO algorithm supports PSO. In grey wolf optimization, the leadership hierarchy consists of three types of wolves: alpha α, beta β, and delta δ. Where the first one represents the best solution and the second and third represent the next best solutions. The population that has other wolves too, follows the position pos of these three leader wolves that are hunting wolves.
The position of the three wolves while encircling their prey is governed by the following equations:
, , and are the positions of the best wolves in each iteration and X (t) is the location of the grey wolves.
The PSO directs some particles to random positions with the possibility of them becoming trapped in local minima. Thus, GWO helps them to get away from local minima by improving their positions. The updated position of the best three agents with the weights added is given by the following equations:
Here
,
, and
give information on the best positions about the agents (wolves). The above equations are used to update the velocity equation of the PSO as follows:
There is scope for improvement in PSOGWO. It was found that the biased behavior of wolves sometimes does not give the best solution. This biased nature is handled by making the wolves unbiased so that their walk is more refined. The fittest wolf is selected rather than a random wolf, and the wolves are arranged in a decreasing order with the fittest wolf at the top. Thus, the position of the wolves is updated by updating the velocity equation as follows:
Here, is the parameter that is changed as per the updated position of the wolves based on their fitness.
In each iteration, it is important that the wolves move towards their prey without being trapped in the local Pareto, so instead of their walk being random, their walk arrangement is completed in the decreasing order of their fitness value, as shown in
Figure 3.
It is important that the leaders are always fit to guide the other wolves to catch their prey. This biased nature of the wolves in state-of-art PSOGWO to reach the optimal solution motivates us to improve their behavior, so that they are unbiased. Moreover, the fittest wolf is always followed, rather than the vice versa situation. This results in obtaining the Pareto optimal solution.
5. Results and Discussion
The simulation was executed on a Windows 10 operating system. The system has 8 GB RAM with 11th Gen Intel (R) i5—1135 G7 @ 2.4 GHz 1.3 GHz and a 64-bit processor. MATLAB version (2021a) was used as the tool of choice for implementing the Shapley hybrid multi-objective optimization algorithm; the number of executed times was 100 (runs), and the best solution of these runs was selected as the optimum solution. The resultant archive, as an outcome of the multi-objective optimization problem, will have all of the possible non-dominant solutions.
The performance of the proposed Shapley hybrid multi-objective optimization algorithm was compared with that of unbiased PSOGWO, PSOGWO, and GWO, as mentioned in
Section 2.
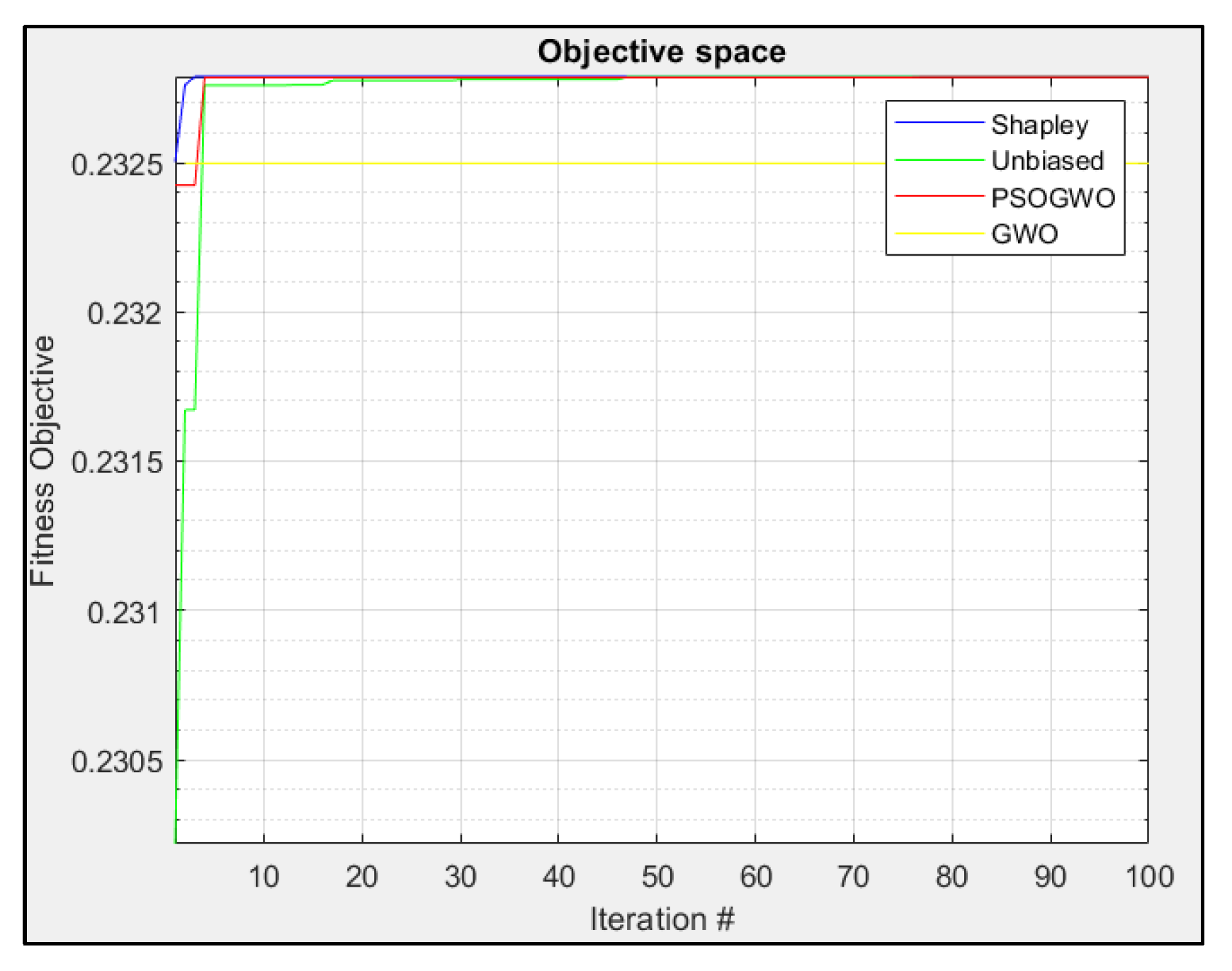
Figure 5 shows the convergence characteristics of Shapley hybrid PSOGWO, unbiased PSOGWO, PSOGWO, and GWO. The Shapley-based PSOGWO converges faster than the other algorithms. The archiving process presents more convergence and the leader selection based on unbiased nature brings diversity to the search mechanism. The Pareto front obtained by the proposed algorithm exhibits superior characteristics in terms of searching space as well as population diversity.
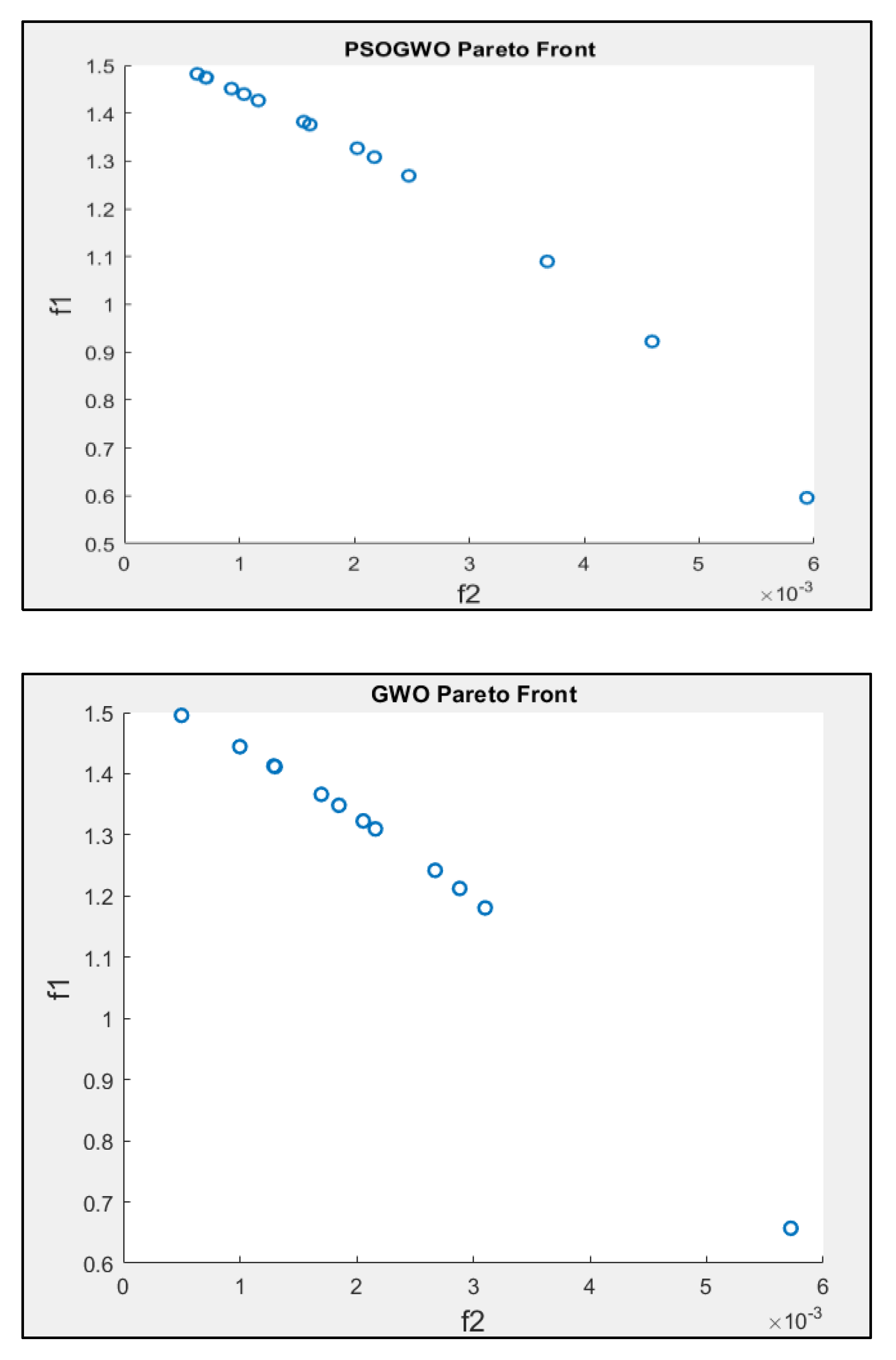
The Pareto optimal front obtained by the four algorithms on the fitness function f1 (in our case, the energy efficiency) and f2 (the sensing duration) is illustrated in
Figure 6. It can be observed by inspecting the figure that the Pareto optimal solution obtained in the proposed Shapley hybrid multi-objective optimization algorithm is much closer to the optimum value of the constraint boundaries. The most interesting pattern is that the Pareto optimal solutions obtained by unbiased PSOGWO, PSOGWO, and GWO provide solutions but are scattered, away from the optimum region of interest. This shows that the Shapley hybrid multi-objective optimization algorithm has the potential to outperform the other algorithms considered.
A comparison of the proposed Shapley PSOGWO algorithm with unbiased PSOGWO, PSOGWO, and GWO in terms of the maximum, the standard deviation, and average energy efficiency and throughput is tabulated in
Table 1.
In our considered system, the default values of various parameters are adopted as given in
Table 2.
From Equation (18), the system’s throughput and energy efficiency depend on the various parameters
ib,
iss ,
,
, . Thus, we studied the effect of different parameters on the system’s throughput and energy efficiency individually.
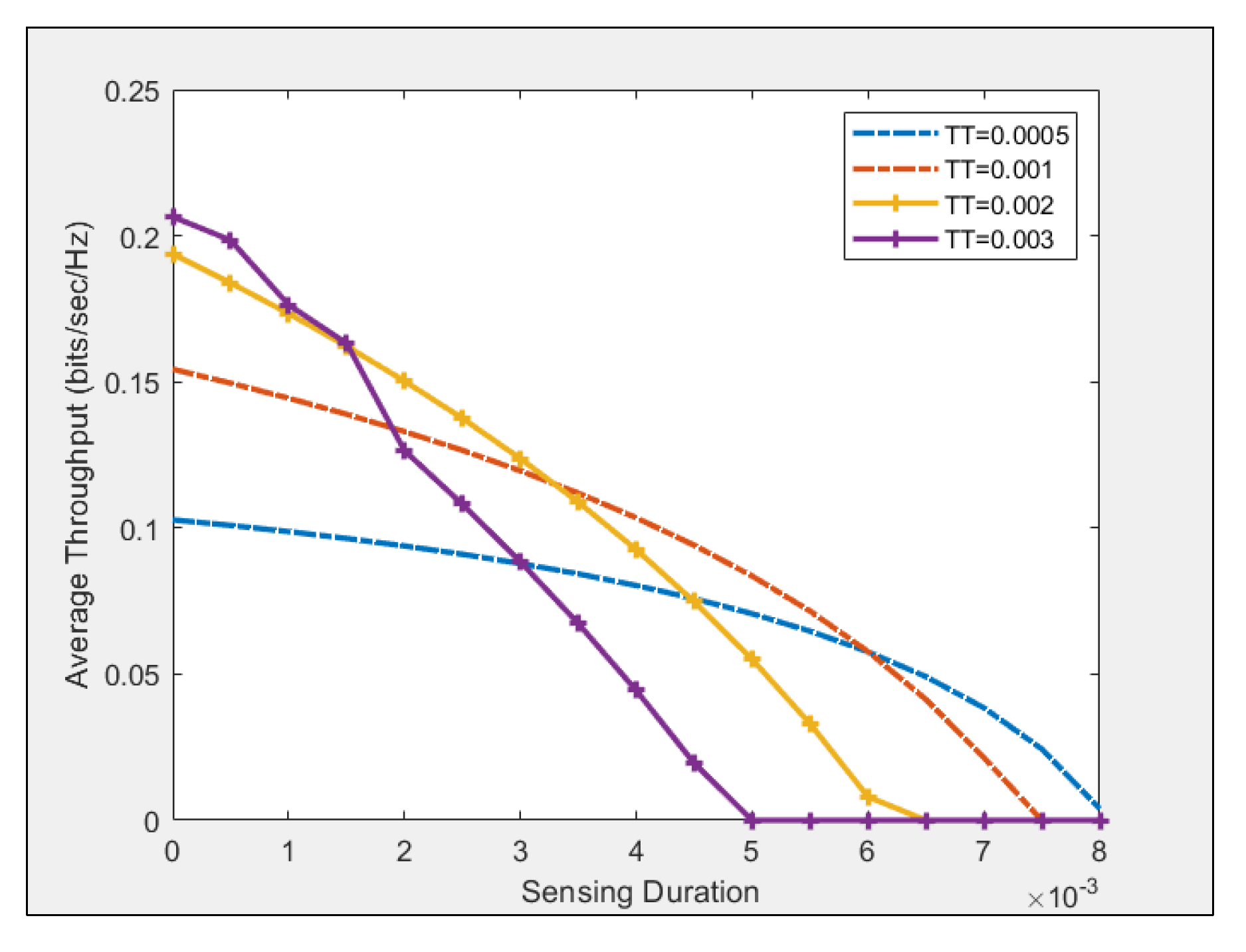
Figure 7 plots the average throughput of the system vs. the sensing duration of the spectrum sensing unit at the SU. The average transmission time was considered from 0.0005 to 0.001. For various values of the transmission time, the throughput was high when the sensing duration was low. However, as the sensing duration increased and for a given transmission time, the throughput gradually decreased. This was more pronounced when the transmission times were higher. Thus, this resulted in the throughput of the system first increasing up to an optimal value and then it started to decrease.
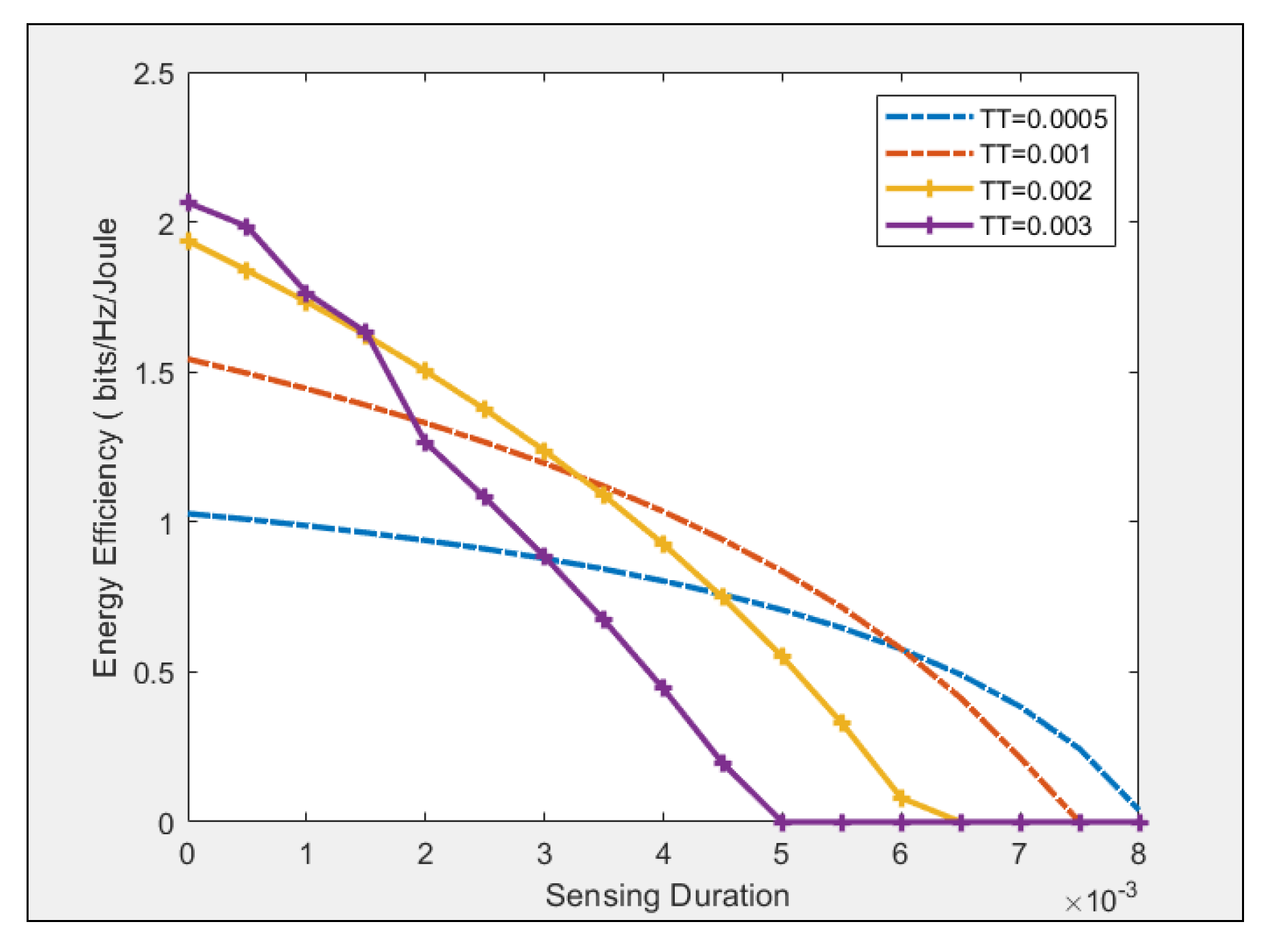
Figure 8 shows that the energy efficiency of the system first increased up to an optimal point with increasing transmission time and then it started to decrease. Here, the EE is at a maximum for
= 0.003 s.
There is a decrease in the EE for all the values of transmission time. At higher
transmission, energy efficiency increases and there is an increase in throughput. With the high data rate, the transmission time seems to be limited to handle a large amount of data. Therefore, there is an increase in energy consumption, which leads to a decrease in energy efficiency. Furthermore, the behavior of the throughput was also observed by varying
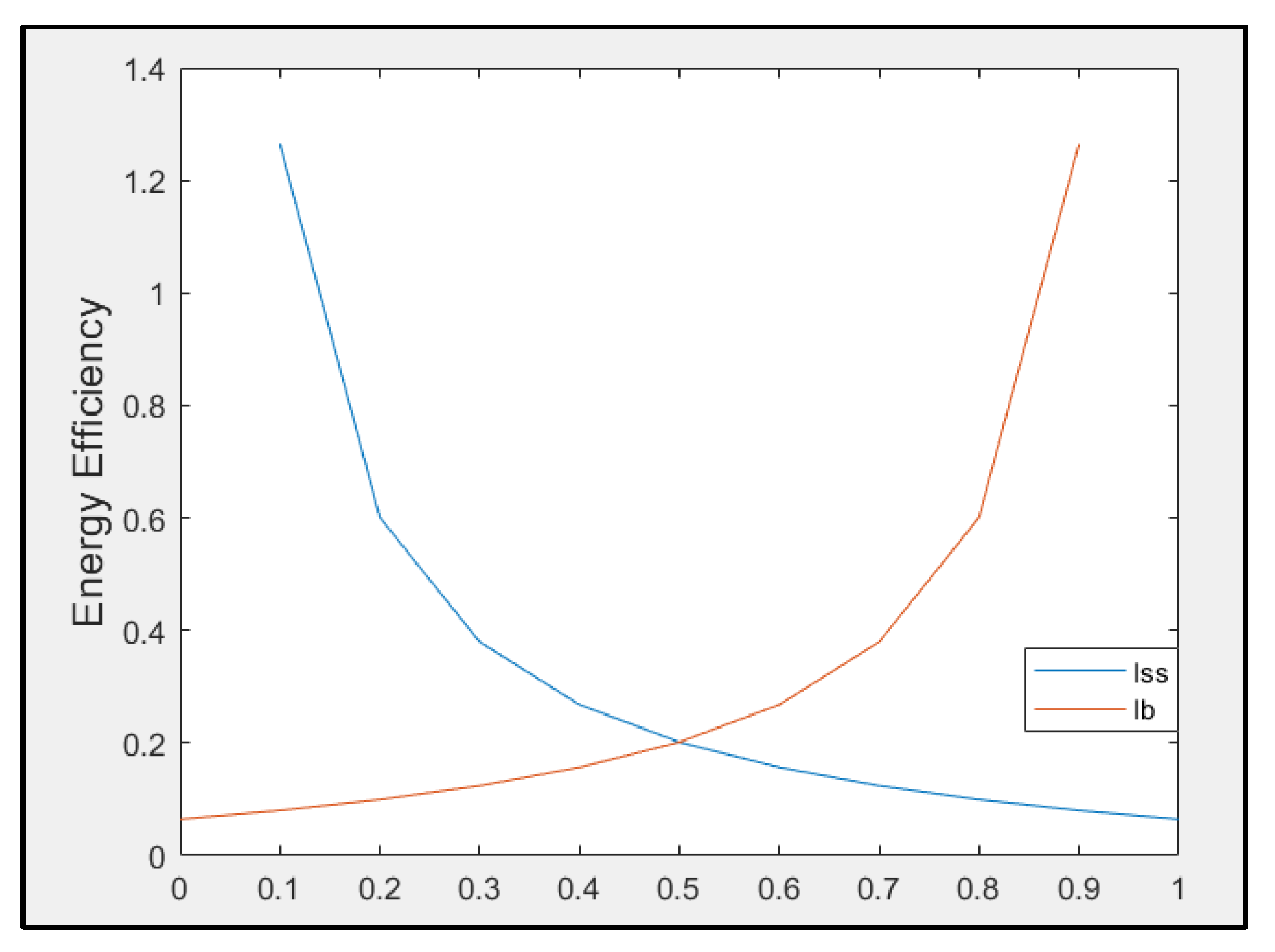
ib and
iss, as shown in
Figure 9. With the increase in
iss, the throughput dropped swiftly initially until
iss was 0.5; however, following that drop, it continued to fall but became more gradual. The behavior of
ib vs. the throughput was observed to follow a reverse trend as observed with
iss.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}