1. Introduction
Systems whose dynamics evolve in an infinite-dimensional Hilbert space are denominated as infinite-dimensional systems modeled by partial differential equations (PDEs), which are also termed as distributed parameter systems (DPSs), since it reflects the spatial distribution of a physical quantity. The main goal when designing the control system for these class of systems is satisfying stability in the presence of external disturbances.
Dynamical systems given either in the input–output equation form, modeled through ordinary differential equations (ODEs), or in the state-space form can be transformed to the transfer function (transfer matrix) form; this latter description is always rational with real coefficients. Transfer functions from DPSs are non-rational functions which can be analytic in the complex plane and having no poles, such as in the case of the transport equation, namely, a first-order PDE, or having only zeros in their denominator, such as for the diffusion equation with Neumann boundary conditions or for the wave equation [
1]. From classical control theory, classical controllers are designed from the knowledge of the transfer function, i.e., from an output/input description of the system. From DPSs, if a closed-form expression of their transfer function is provided, then the direct design of the controller may be possible. This approach is referred to as
direct controller design. The primary drawback from this approach is the requirement of an explicit representation of the transfer function. In addition, the controller design will be infinite-dimensional, so this must be approximated by a finite-dimensional system. For some practical applications, when a transfer function for a DPS is not available, then the
indirect controller design approach is the most common alternative to be employed. It consists of obtaining a finite-dimensional approximation of the system from which the controller can be designed [
2].
The design of a feedback law such that it guarantees the tracking of a reference signal in the presence of an external disturbance, the latter generated through an exosystem, is the main objective when invoking the regulator problem theory [
3]. Beyond finite-dimensional systems, the regulator problem theory has been playing an interesting role in the control of infinite-dimensional systems. In this work, we deal with the state feedback regulator problem (SFRP) where the state of the feedback law is from a finite-dimensional exosystem.
From linear finite-dimensional systems, the regulator problem theory has been extended to infinite-dimensional systems also known as DPSs [
4,
5,
6,
7,
8]. In [
6,
7], control systems governed by a discrete spectral operator were introduced, where the so-called
state operator meets with the property of spectrum decomposition [
9,
10] from which a controllability condition was determined implying the stabilizability of the control system through a finite-dimensional controller. In [
8], the regulator problem was extended to DPSs for bounded input and output operators, with reference and disturbance signals generated through a finite-dimensional exosystem, providing criteria for the solvability of the regulator equations. The linear regulator problem when considering bounded input and output operators but also bounded disturbance operators entering along the entire interval is shown in [
11]. In this last work, the linear regulation problem was solved to the heat equation, damped wave equation, harmonic tracking for a coupled wave equation, control of a damped Rayleigh beam, vibration of a 2D plate, thermal control of a 2D fluid flow, thermal regulation in a 3D room, and control of a linearized Stokes flow in 2D. Reviews about the generalization of the regulator problem to infinite-dimensional systems can be found in [
12,
13]. The output regulation problem for DPSs has been studied extensively for different classes of PDEs systems; a summary is given in [
14]. In [
14,
15], following the methodology from [
11] which is based on the derivation of the transfer function from the system model representation in the state-space form to the solvability of the regulator equations, the SFRP was solved for the R–D equation. An abstract model for the R–D equation was derived where the state operator has the form given by the Sturm–Liouville differential operator (SLDO) plus a parametric term. Simulation results validate their proposal showing the achievement of the regulation tasks to a set-point as well as to harmonic tracking under both set-point disturbance and harmonic disturbance rejection.
The phenomena described by a C–D equation exhibit diffusion and convection properties that are common in many scenarios. Diffusion is the mix of a substance through the medium while convection is the movement of the substance by means of the medium, e.g., when considering smoke rising from a chimney, the smoke particles are convected upward with the air and diffuse within the air currents. It is possible for the convection of the substance to contribute more of a movement in the substance than the diffusion itself. In [
16], an illustration about the solutions and behavior for diffusion problems when including the convection term is given. A review of different diffusion models, namely, the Maxwell–Stefan model, the generalized Fick’s law, the classical Fick’s law, and the irreversible thermodynamic model, is given in [
17]. The importance for an accurate measuring and prediction of the diffusion coefficients as well as the importance of considering the dragging effect is emphasized. So, an accurate method to approximate the gas–oil mass transfer mechanism based on irreversible thermodynamics was proposed. In this last work, molecular diffusion is only discussed since the system was assumed to be an isothermal one. His proposal is validated through numerical examples and experimental test cases when considering convection for some cases. A chemotaxis–diffusion–convection coupling system which describes a form of buoyant convection in which the fluid develops convection cells and plume patterns is studied in [
18]. The pattern formation and hydrodynamical stability of the system was investigated through the development of an upwind finite element method based on a two-dimensional convective chemotaxis–fluid model. Numerical results show the influence of the deterministic initial condition on the overall behavior regarding the number of plumes and that the overall system was stabilized by the chemotaxis. To the best of our knowledge, there is no work about the solvability of the SFRP to a C–D system. In fact, there is not much in the literature about works related to the control of a C–D system.
In this work, our proposal is related to solving the SFRP to the C–D equation. Our main contribution is the definition of the state operator in terms of the SLDO plus an integral term, giving rise to an abstract model for the C–D equation from which the regulator equations have solutions.
The organization of the manuscript is as follows. A summary about the properties of the modeling of DPSs through transfer functions, a brief description of the SFRP for finite-dimensional and infinite-dimensional systems and its application to the R–D equation are given in
Section 1. In
Section 2, we formulated the problem statement; the design of the regulator is carried out in
Section 3; in
Section 4, we included simulation results; and the conclusion is given at the end.
3. Regulator Design
Let us consider the C–D system
with
the
diffusion term, with
diffusion coefficient, and
the
convection term, with
convection coefficient,
denotes the second partial derivative and
denotes the first partial derivative both with respect to space.
In our work, the system (
36)–(40) is defined in the abstract form (
13)–(15) in the Hilbert state space
. The maximal elliptic operator is given by
in (
8) belonging to
, indicating the Sobolev space of functions in
with a square integrable second derivative.
So, from (
8), here, the state operator is defined in the form of the SLDO as given by
with
this latter expression (operator) an infinitesimal generator of a
semigroup for abstract differential equations related with parabolic PDEs as the heat (diffusion) equation [
10,
11].
Let us assume that the state operator (
41) is a self-adjoint (Hermitian) operator in
, i.e.,
with
where, because for
the mild solution is a classical solution, the symmetric boundary conditions (
2) are part of the domain of
.
The spectrum of
denoted by
where
is purely discrete with a set of orthonormal eigenvectors
and
is an infinitesimal generator in terms of the eigenfunction expansion
which gives rise to an orthonormal basis for
.
The system (
36)–(40) is a single-input/single-output system with scalar input
, output
C, and disturbance
. The output is the average transport reaction over a small interval about a point
, i.e.,
with
Since , C is a bounded linear observation functional on . In our work, entering across the entire interval is considered, so .
3.1. Trajectory Tracking in Presence of a Constant Disturbance
In our proposal, the regulator (
33) and (34) takes the form
with
The block diagonal matrix
S allows us to decouple the regulator equations. To achieve this, when trying with the trajectory tracking, the regulator equations can be written as
with
Defining
and
, then
In this case
, so
and
with
. The regulator equations applied to the vector
are then given as
From these last equations, expanding the regulator equation results in
Since (
49) must be satisfied for all
w, let us first consider the event for which
and
and then for
and
yielding
Recalling that the exosystem (
22)–(25) is neutrally stable, multiplying (51) by
i, an imaginary number, and adding the result to (
50) results in
Since
, premultiplying both sides of (
52) by
yields
Premultiplying by
C both sides of (
53) and from the identity
, with
and
, then
. Consequently,
From the identity
, (
54) is rewritten as
From the above, matching real and imaginary parts,
Accordingly, from the definition
the control gains are given by
Here, the system has been assumed to be real, i.e., for all . It is worthwhile to mention that must differ from zero as well as be invertible for solvability.
Trying now with the rejection of a constant disturbance, the regulator equations are given as
where
and
. Thus, the regulator equations become
Solving for
, the last system of equations then
Again, assuming
and using the following definition
consequently, combining (
55) and (
56) results in
3.2. Trajectory Tracking in Presence of Harmonic Disturbance
Along the same lines as that for the trajectory tracking control problem with rejection of a constant disturbance but now trying with the rejection of a harmonic disturbance, from (
45) and (46) with
and, from the block diagonal matrix
S, decoupling the regulator equations when considering the case of trajectory tracking with rejection of a harmonic disturbance
with
thus, the solution is given by (
55). In addition, referring us to the blocks in
S to try with the rejection of harmonic disturbance, where
, then
where
Again, to this case
so, looking for
, where
, and
, the regulator equations applied to the vector
result in the system
Since (
59) must be satisfied for
w, first consider the event for
and
to then consider the episode for
and
, thus
Multiplying (61) by the imaginary number
i and then adding the result to (
60) yields
Noting that
, premultiplying (
62) by
, it becomes
Thus, premultiplying by
C both sides of (
63) and from the fact that (58) implies
so, results
where the definition
was used. At last, solving for
yields
where
Hence, combining (
55) and (
64) yields
with
4. Simulation Results
In order to validate our proposal via numerical simulation, for the case of trajectory tracking under the influence of a constant disturbance, we have set
,
,
,
,
, and
.
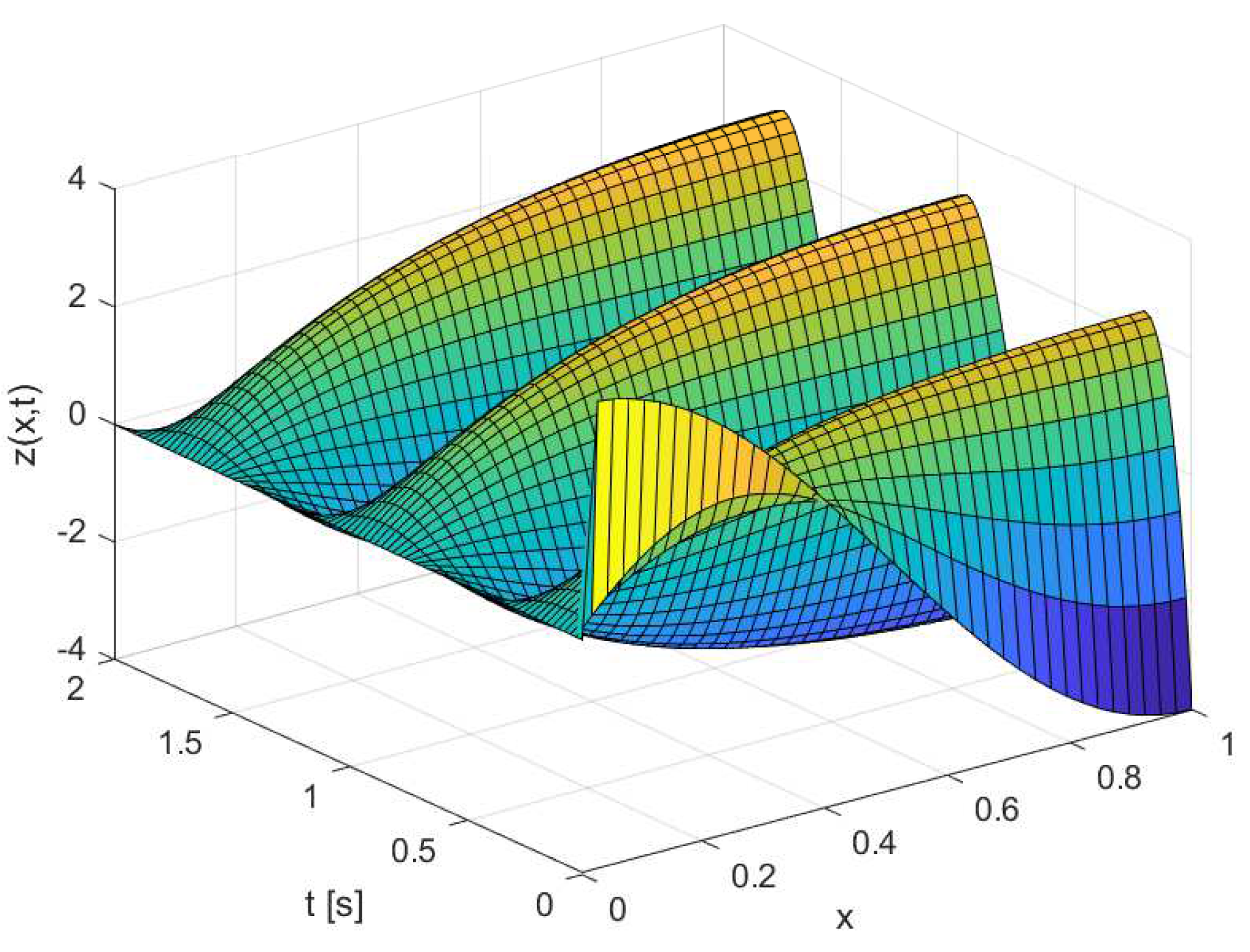
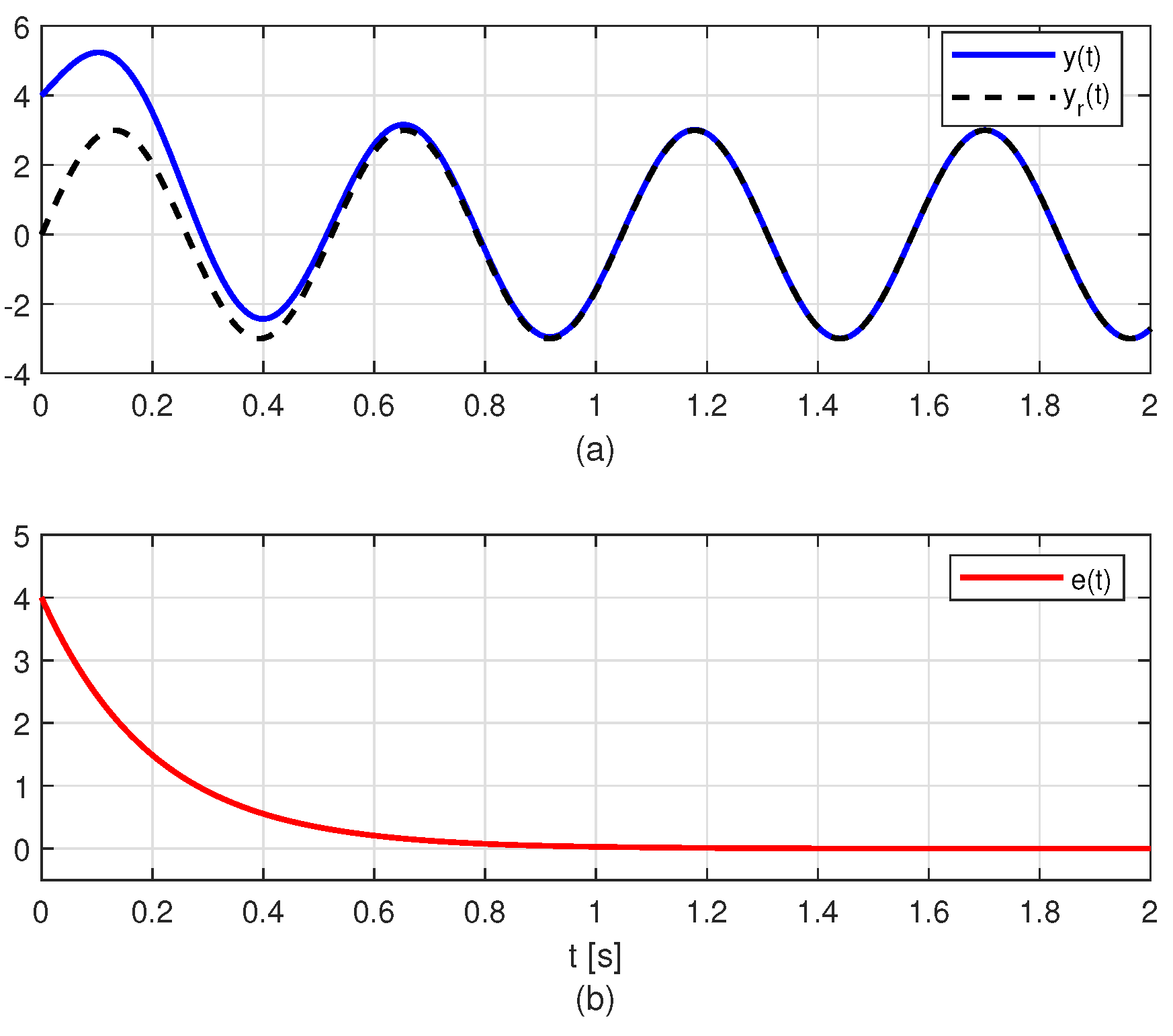
Figure 1a shows the tracking of the reference signal
by the output
from the initial condition
.
Figure 1b shows the error signal
between the controlled output
and the reference signal
from which it can be seen that
as
. The solution surface is shown in
Figure 2.
To the case of trajectory tracking under the influence of harmonic disturbance, we set
,
,
,
,
,
,
and
.
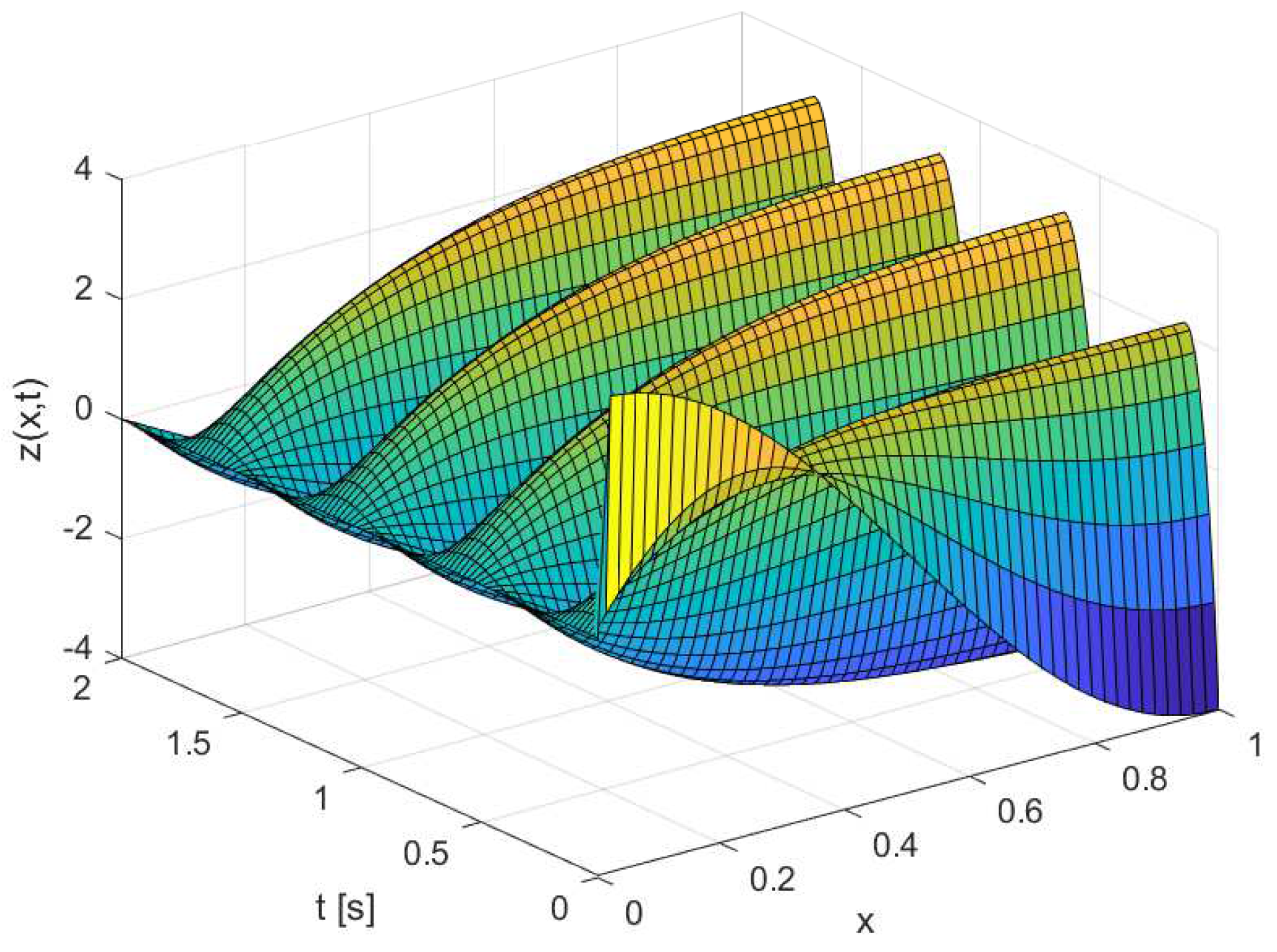
Figure 3a shows the tracking of the reference signal
by the controlled output
for the initial condition
.
Figure 3b exhibits that
as
. The corresponding solution surface is shown in
Figure 4.
So, the regulator performs well under the presence of external disturbances for both cases, i.e., in the presence of either a constant disturbance or harmonic disturbance.




{kind=link}
{kind=link}
{kind=link}
{kind=link}



