On the Selective Vehicle Routing Problem




Abstract
:1. Introduction
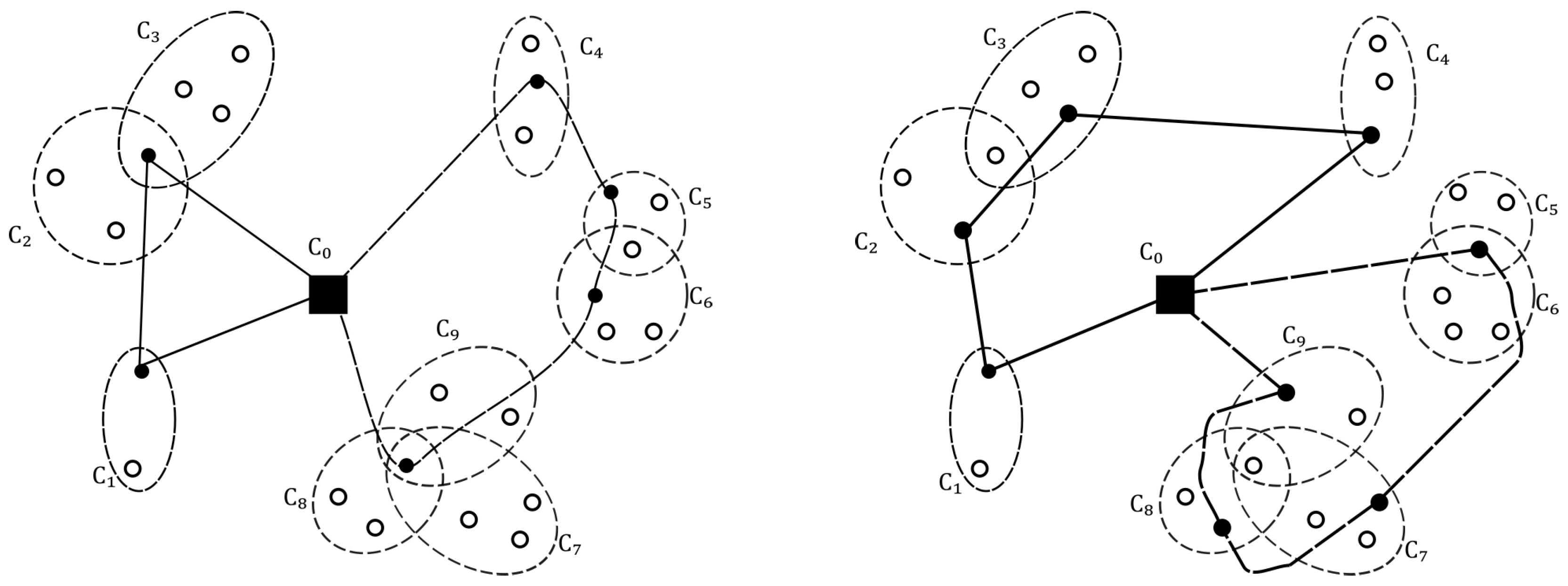
2. Definition of the Selective Vehicle Routing Problem
- Select a subset of nodes such that , for all
- Determine a minimum cost collection of routes in the subgraph of G induced by S, satisfying the capacity constraints.
3. A Valid Mathematical Model of Selective Vehicle Routing Problem
- The parameter indicates if a certain node belongs to a cluster , , thusThis means, if the node i is an element of the cluster , then ; otherwise, .
- The binary decision variable is defined as follows:
- The integer decision variables are defined as follows: if the edge is not included in a solution route, and may take a positive integer value less or equal to n, showing its order in the corresponding route.
4. Computational Results
4.1. Problem Instances
- We considered four cases for the maximum number of clusters that a node may belong. If each node belongs to exactly one cluster, that corresponds to GVRP, and the other cases in which nodes may belong to two, three, or four clusters are SVRP.
- The maximum percentage of nodes within a cluster that may belong to two clusters was established as 50%. This value can be increase based on chosen nodes that can be in three or four clusters.
- The maximum percentage of nodes that may belong to two clusters was set to 30%. This value can also be increase based on chosen nodes that can be in three or four clusters.
4.2. Computational Results on the Possada et al. Instances
4.3. Computational Results on Our Proposed Instances
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dantzig, G.B.; Ramser, J.H. The Truck Dispatching Problem. Manag. Sci. 1959, 6, 80–91. [Google Scholar] [CrossRef]
- Clarke, G.; Wright, J.W. Scheduling of Vehicles from a Central Depot to a Number of Delivery Points. Oper. Res. 1964, 12, 568–581. [Google Scholar] [CrossRef]
- Letchford, A.; Salazar-Gonzales, J. The capacitated vehicle routing problem: Stronger bounds in pseudo-polynomial time. Eur. J. Oper. Res. 2019, 227, 24–31. [Google Scholar] [CrossRef] [Green Version]
- Fan, J. The vehicle routing problem with simultaneous pickup and delivery based on customer satisfaction. Procedia Eng. 2011, 15, 5284–5289. [Google Scholar] [CrossRef] [Green Version]
- El-Sherbeny, N. Vehicle routing with time windows: An overview of exact, heuristic and metaheuristic methods. J. King Saud Univ.-Sci. 2010, 22, 123–131. [Google Scholar] [CrossRef] [Green Version]
- Cattaruzza, D.; Absi, N.; Feillet, D. Vehicle routing problems with multiple trips. 4OR 2016, 14, 223–259. [Google Scholar] [CrossRef]
- Li, F.; Golden, B.; Wasil, E. The open vehicle routing problem: Algorithms, large-scale test problems and computational results. Comput. Oper. Res. 2007, 34, 2918–2930. [Google Scholar] [CrossRef]
- Erdoğan, S.; Miller-Hooks, E. A Green Vehicle Routing Problem. Transp. Res. Part Logist. Transp. Rev. 2012, 48, 100–114. [Google Scholar] [CrossRef]
- Ghiani, G.; Improta, G. An efficient transformation of the generalized vehicle routing problem. Eur. J. Oper. Res. 2000, 122, 11–17. [Google Scholar] [CrossRef]
- Pintea, C.; Chira, C.; Dumitrescu, D.; Pop, P. Sensitive ants in solving the generalized vehicle routing problem. Int. J. Comput. 2011, 6, 734–741. [Google Scholar] [CrossRef] [Green Version]
- Pop, P.C.; Matei, O.; Sitar, C.P. An improved hybrid algorithm for solving the generalized vehicle routing problem. Neurocomputing 2013, 109, 76–83. [Google Scholar] [CrossRef]
- Pop, P.C.; Kara, I.; Horvat-Marc, A. New mathematical models of the generalized vehicle routing problem and extensions. Appl. Math. Model. 2012, 36, 97–107. [Google Scholar] [CrossRef]
- Horvat-Marc, A.; Fuksz, L.; Pop, P.C.; Dănciulescu, D. A decomposition-based method for solving the clustered vehicle routing problem. Log. J. IGPL 2017, 26, 83–95. [Google Scholar] [CrossRef]
- Defryn, C.; Sörensen, K. A fast two-level variable neighborhood search for the clustered vehicle routing problem. Comput. Oper. Res. 2017, 83, 78–94. [Google Scholar] [CrossRef] [Green Version]
- Exposito-Izquierdo, C.; Rossi, A.; Sevaux, M. A two-level solution approach to solve the clustered vehicle routing problem. Comput. Ind. Eng. 2016, 91, 274–289. [Google Scholar] [CrossRef]
- Pop, P.C.; Fuksz, L.; Horvat-Marc, A.; Sabo, C. A novel two-level optimization approach for clustered vehicle routing problem. Comput. Ind. Eng. 2018, 115, 304–318. [Google Scholar] [CrossRef]
- Posada, A.; Rivera, J.; Palacio, J. A Mixed-Integer Linear Programming Model for a Selective Vehicle Routing Problem. In Proceedings of the Applied Computer Sciences in Engineering (WEA 2018), Medellín, Colombia, 17–19 October 2018; Figueroa-García, J.C., Villegas, J.G., Orozco-Arroyave, J.R., Eds.; Communications in Computer and Information Science. Springer: Berlin/Heidelberg, Germany, 2018; Volume 916, pp. 108–119. [Google Scholar] [CrossRef]
- Pop, P. The generalized minimum spanning tree problem: An overview of formulations, solution procedures and latest advances. Eur. J. Oper. Res. 2020, 283, 1–15. [Google Scholar] [CrossRef]
- Pop, P.C.; Matei, O.; Sabo, C.; Petrovan, A. A two-level solution approach for solving the generalized minimum spanning tree problem. Eur. J. Oper. Res. 2018, 265, 478–487. [Google Scholar] [CrossRef]
- Fischetti, M.; González, J.J.S.; Toth, P. The symmetric generalized traveling salesman polytope. Networks 1995, 26, 113–123. [Google Scholar] [CrossRef]
- Fischetti, M.; González, J.J.S.; Toth, P. A Branch-and-Cut Algorithm for the Symmetric Generalized Traveling Salesman Problem. Oper. Res. 1997, 45, 378–394. [Google Scholar] [CrossRef]
- Demange, M.; Monnot, J.; Pop, P.; Ries, B. On the complexity of the selective graph coloring problem in some special classes of graphs. Theor. Comput. Sci. 2014, 540–541, 89–102. [Google Scholar] [CrossRef]
- Fidanova, S.; Pop, P. An improved hybrid ant-local search for the partition graph coloring problem. J. Comput. Appl. Math. 2016, 293, 55–61. [Google Scholar] [CrossRef]
- Feremans, C.; Labbé, M.; Laporte, G. Generalized network design problems. Eur. J. Oper. Res. 2003, 148, 1–13. [Google Scholar] [CrossRef]
- Pop, P. Generalized Network Design Problems, Modelling and Optimization; De Gruyter: Berlin, Germany, 2012. [Google Scholar]
- Bektaş, T.; Erdoğan, G.; Røpke, S. Formulations and Branch-and-Cut Algorithms for the Generalized Vehicle Routing Problem. Transp. Sci. 2011, 45, 299–316. [Google Scholar] [CrossRef]


{kind=link}
| Model | SVRP | GVRP | ||||
|---|---|---|---|---|---|---|
| Average Gap | Average Time (seconds) | Number of Optimal Solutions | Average Gap | Average Time (seconds) | Number of Optimal Solutions | |
| MILP | 21.26% | 1848.22 | 19 | 33.90% | 2742.76 | 3 |
| MILP | 21.38% | 1663.40 | 20 | 29.19% | 2505.06 | 4 |
| MILP | 19.51% | 1602.86 | 22 | 29.83% | 2555.15 | 4 |
| MILP | 21.46% | 1848.88 | 19 | 33.91% | 2978.26 | 3 |
| MILP | 0.0004% | 21.05 | 30 | 2.26% | 1738.95 | 7 |
| 0.59% | 23,063.55 | 11 | ||||
| Instance Index | Instance’s Name Complexity | Level of Solution | OPT [26] | Our Results | |
|---|---|---|---|---|---|
| Solution | Time | ||||
| 1. | SVRP-A-n32-k5-C11-V2 | 1 | 386 | 386 | 574.578 |
| 2. | SVRP-A-n33-k6-C11-V2 | 1 | 370 | 370 | 106.329 |
| 3. | SVRP-A-n33-k6-C17-V3 | 1 | 465 | 465 | 5231.750 |
| 4. | SVRP-A-n34-k5-C12-V2 | 1 | 419 | 419 | 33,748.204 |
| 5. | SVRP-A-n37-k5-C13-V2 | 1 | 347 | 347 | 965.516 |
| 6. | SVRP-A-n37-k5-C19-V3 | 1 | 432 | 432 | 335.703 |
| 7. | SVRP-A-n38-k5-C13-V2 | 1 | 367 | 367 | 3278.234 |
| 8. | SVRP-B-n31-k5-C11-V2 | 1 | 356 | 356 | 588.157 |
| 9. | SVRP-B-n38-k6-C13-V2 | 1 | 370 | 370 | 21,129.14 |
| 10. | SVRP-B-n39-k5-C13-V2 | 1 | 280 | 280 | 1147.344 |
| 11. | SVRP-P-n16-k8-C6-V4 | 1 | 170 | 170 | 0.250 |
| 12. | SVRP-P-n16-k8-C8-V5 | 1 | 239 | 239 | 0.516 |
| 13. | SVRP-P-n19-k2-C10-V2 | 1 | 147 | 147 | 0.422 |
| 14. | SVRP-P-n19-k2-C7-V1 | 1 | 111 | 111 | 0.203 |
| 15. | SVRP-P-n20-k2-C10-V2 | 1 | 154 | 154 | 0.625 |
| 16. | SVRP-P-n20-k2-C7-V1 | 1 | 117 | 117 | 0.187 |
| 17. | SVRP-P-n21-k2-C11-V2 | 1 | 160 | 160 | 0.813 |
| 18. | SVRP-P-n21-k2-C7-V1 | 1 | 117 | 117 | 0.484 |
| 19. | SVRP-P-n22-k2-C11-V2 | 1 | 162 | 162 | 1.078 |
| 20. | SVRP-P-n22-k2-C8-V1 | 1 | 111 | 111 | 0.390 |
| 21. | SVRP-P-n22-k8-C11-V5 | 1 | 314 | 314 | 23.250 |
| 22. | SVRP-P-n22-k8-C8-V4 | 1 | 249 | 249 | 1.313 |
| 23. | SVRP-P-n23-k8-C12-V5 | 1 | 312 | 312 | 145.422 |
| 24. | SVRP-P-n23-k8-C8-V3 | 1 | 174 | 174 | 30.672 |
| Instance Index | Instance’s Name | Level of Complexity | Optimal Solution | Time (seconds) | Level of Complexity | Optimal Solution | Time (seconds) | Level of Complexity | Optimal Solution | Time (seconds) |
|---|---|---|---|---|---|---|---|---|---|---|
| 1. | SVRP-A-n32-k5-C11-V2 | 2 | 319.93 | 0.781 | 3 | 315.67 | 0.937 | 4 | 310.14 | 0.640 |
| 2. | SVRP-A-n33-k6-C11-V2 | 2 | 285.88 | 0.609 | 3 | 285.88 | 0.421 | 4 | 285.88 | 0.500 |
| 3. | SVRP-A-n33-k6-C17-V3 | 2 | 406.05 | 4.578 | 3 | 393.17 | 8.906 | 4 | 391.66 | 2.297 |
| 4. | SVRP-A-n34-k5-C12-V2 | 2 | 319.93 | 0.781 | 3 | 319.20 | 0.578 | 4 | 313.43 | 0.500 |
| 5. | SVRP-A-n37-k5-C13-V2 | 2 | 314.81 | 1.672 | 3 | 316.36 | 1.531 | 4 | 313.06 | 1.078 |
| 6. | SVRP-A-n37-k5-C19-V3 | 2 | 433.77 | 2.641 | 3 | 433.77 | 4.359 | 4 | 428.41 | 5.437 |
| 7. | SVRP-A-n38-k5-C13-V2 | 2 | 307.45 | 1.438 | 3 | 305.23 | 0.906 | 4 | 316.50 | 0.656 |
| 8. | SVRP-B-n31-k5-C11-V2 | 2 | 334.00 | 0.453 | 3 | 330.71 | 0.640 | 4 | 335.26 | 0.375 |
| 9. | SVRP-B-n38-k6-C13-V2 | 2 | 297.48 | 144.813 | 3 | 300/34 | 3.484 | 4 | 293.90 | 9.094 |
| 10. | SVRP-B-n39-k5-C13-V2 | 2 | 267.93 | 35.516 | 3 | 267.81 | 16.203 | 4 | 243.82 | 12.609 |
| 11. | SVRP-P-n16-k8-C6-V4 | 2 | 171.48 | 0.032 | 3 | 171.48 | 0.031 | 4 | unfeasible | |
| 12. | SVRP-P-n16-k8-C8-V5 | 2 | 241.68 | 0.062 | 3 | 241.68 | 0.046 | 4 | 249.30 | 0.015 |
| 13. | SVRP-P-n19-k2-C10-V2 | 2 | 144.48 | 0.172 | 3 | 133.00 | 0.141 | 4 | 123.71 | 0.094 |
| 14. | SVRP-P-n19-k2-C7-V1 | 2 | 95.43 | 0.141 | 3 | 95.43 | 0.094 | 4 | 88.07 | 0.078 |
| 15. | SVRP-P-n20-k2-C10-V2 | 2 | 125.75 | 0.188 | 3 | 128.65 | 0.172 | 4 | 134.35 | 0.110 |
| 16. | SVRP-P-n20-k2-C7-V1 | 2 | 97.95 | 0.140 | 3 | 94.26 | 0.156 | 4 | 97.95 | 0.140 |
| 17. | SVRP-P-n21-k2-C11-V2 | 2 | 134.05 | 0.235 | 3 | 134.05 | 0.188 | 4 | 131.80 | 0.172 |
| 18. | SVRP-P-n21-k2-C7-V1 | 2 | 106.10 | 0.140 | 3 | 92.02 | 0.109 | 4 | 103.15 | 0.203 |
| 19. | SVRP-P-n22-k2-C11-V2 | 2 | unfeasible | 3 | unfeasible | 4 | unfeasible | |||
| 20. | SVRP-P-n22-k2-C8-V1 | 2 | 88.09 | 0.413 | 3 | 77.52 | 0.442 | 4 | 77.18 | 0.526 |
| 21. | SVRP-P-n22-k8-C11-V5 | 2 | 295.28 | 0.329 | 3 | 295.28 | 0.328 | 4 | 292.49 | 0.328 |
| 22. | SVRP-P-n22-k8-C8-V4 | 2 | 213.51 | 0.359 | 3 | 213.51 | 0.375 | 4 | 208.86 | 0.234 |
| 23. | SVRP-P-n23-k8-C12-V5 | 2 | unfeasible | 3 | unfeasible | 4 | unfeasible | |||
| 24. | SVRP-P-n23-k8-C8-V3 | 2 | unfeasible | 3 | unfeasible | 4 | unfeasible |
| Instance Index | Instance’s Name | Level of Complexity | Best Solution | Time (seconds) | Level of Complexity | Best Solution | Time (seconds) | Level of Complexity | Best Solution | Time (seconds) |
|---|---|---|---|---|---|---|---|---|---|---|
| 1. | A-n39-k5-C13-V2 | 2 | 283.10 | 3.047 | 3 | 288.01 | 8.594 | 4 | 282.66 | 1.5 |
| 2. | A-n39-k6-C13-V2 | 2 | 305.67 | 1.531 | 3 | 313.51 | 0.594 | 4 | 321.75 | 1.203 |
| 3 | A-n48-k7-C16-V3 | 2 | 355.88 | 110.047 | 3 | 366.65 | 232.094 | 4 | 337.27 | 3600 * |
| 4 | A-n54-k7-C18-V3 | 2 | 378.53 | 964.984 | 3 | 360.55 | 26.422 | 4 | 391.42 | 198.984 |
| 5 | A-n55-k9-C19-V3 | 2 | 377.20 | 107.328 | 3 | unfeasible | - | 4 | unfeasible | - |
| 6 | A-n61-k9-C21-V4 | 2 | 381.45 | 3600 * | 3 | 369.65 | 1182.5 | 4 | 340.21 | 81.86 |
| 7 | A-n65-k9-C22-V3 | 2 | 409.57 | 3600 * | 3 | 370.99 | 49.297 | 4 | 391.82 | 3600 * |
| 8 | B-n45-k5-C15-V2 | 2 | 378.11 | 44.438 | 3 | 353.13 | 2.672 | 4 | 348.44 | 4.281 |
| 9 | B-n45-k5-C23-V3 | 2 | 453.99 | 146.047 | 3 | 436.31 | 30.437 | 4 | 435.86 | 3.031 |
| 10 | B-n50-k8-C17-V3 | 2 | 475.57 | 820.031 | 3 | 475.57 | 781.578 | 4 | 457.71 | 250.156 |
| 11 | B-n64-k9-C22-V4 | 2 | 429.27 | 3600 * | 3 | 432.94 | 3600 * | 4 | 405.95 | 225.515 |
| 12 | B-n68-k9-C34-V5 | 2 | 569.07 | 3600 * | 3 | 632.69 | 3600 * | 4 | 601.06 | 3600 * |
| 13 | P-n50-k10-C17-V4 | 2 | 263.06 | 92.875 | 3 | 266.01 | 143.844 | 4 | 253.44 | 201.859 |
| 14 | P-n55-k10-C19-V4 | 2 | 254.81 | 92.078 | 3 | 258.35 | 85.672 | 4 | 260.56 | 99.656 |
| 15 | P-n60-k15-C20-V5 | 2 | 300.30 | 677.984 | 3 | 300.35 | 235.187 | 4 | 304.88 | 251.922 |
| 16 | P-n76-k5-C26-V2 | 2 | 299.87 | 3600 * | 3 | 319.41 | 3600 * | 4 | 288.40 | 3600 * |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sabo, C.; Pop, P.C.; Horvat-Marc, A. On the Selective Vehicle Routing Problem. Mathematics 2020, 8, 771. https://doi.org/10.3390/math8050771
Sabo C, Pop PC, Horvat-Marc A. On the Selective Vehicle Routing Problem. Mathematics. 2020; 8(5):771. https://doi.org/10.3390/math8050771
Chicago/Turabian StyleSabo, Cosmin, Petrică C. Pop, and Andrei Horvat-Marc. 2020. "On the Selective Vehicle Routing Problem" Mathematics 8, no. 5: 771. https://doi.org/10.3390/math8050771
APA StyleSabo, C., Pop, P. C., & Horvat-Marc, A. (2020). On the Selective Vehicle Routing Problem. Mathematics, 8(5), 771. https://doi.org/10.3390/math8050771